车载激光雷达关键性能参数及决定因素
2023-01-06 09:40:48宋梦洋凌九红
汽车实用技术 2022年24期
曹 丽,宋梦洋,凌九红
车载激光雷达关键性能参数及决定因素
曹 丽,宋梦洋,凌九红
(武汉光迅科技股份有限公司,湖北 武汉 430205)
近年来,智能汽车的发展极大地推动了激光雷达产业的热度,目前国内外在激光雷达领域布局的公司越来越多。激光雷达系统复杂,应用场景多样,多种技术路线并存,因此,对激光雷达性能的评价不是一个简单的问题,尤其是一些参数容易混淆,如探测精度、探测准确度、探测分辨率、帧频和点频等。论文选择车载激光雷达的关键性能参数,对这些参数的定义、计算方法、相互关系、决定因素等进行了梳理和归纳,可以帮助用户更好地使用激光雷达,对激光雷达的设计也有指导意义。
激光雷达;关键性能参数;计算方法;决定因素;智能汽车
激光雷达是一种发射光束并接收回波获取目标三维信息的系统,已经有几十年的应用历史。近年来智能汽车辅助驾驶技术的兴起,推动了激光雷达的技术发展和产业热度。
激光雷达的参数众多,由于还没有统一的标准,不同厂家在宣传中选择的参数不完全相同。实际上,一些参数并不是激光雷达的核心参数,还有一些参数之间存在较强的关联性。如果不能正确认识这些参数的含义、相互关系、决定因素,很可能被个别高性能指标吸引,而无法了解激光雷达的真实性能。
本文对车载激光雷达的关键性能参数进行了梳理和分析,对系统理解激光雷达的性能参数有重要的作用。
1 车载激光雷达核心性能参数及分类
对车载激光雷达的评价通常涉及到性能、可靠性以及应用等方面。用户关心的参数很多,包括:激光波长、探测距离、视场角(垂直+水平)、测距精度、角分辨率、出点数、线束、安全等级、输出参数、防护等级、功率、供电电压、激光发射方式、使用寿命等。但激光雷达功能上是一种距离测试系统,其核心性能应围绕测试的速度、测试的空间范围、测试分辨率、测试的准确度、测试的重复度几方面来评价。依据这个原则,通常认为激光雷达的核心性能参数有帧频、最大探测距离和最小探测距离、视场角、距离分辨率、水平角分辨率、垂直角分辨率、点频以及测距精度和测距准确度。
根据现有激光测距仪相关标准查询,参数定义如下:
重复频率[1]:每秒钟完成的测距次数。
测程[1-2]:在规定大气条件下,对规定目标达到规定的测距准测率时,能探测到的最远/近距离。
水平视场角:在水平方向上最大方位扫描角度θ。
垂直视场角:在垂直方向上最大方位扫描角度θ。
距离分辨率[3]:在光束传播方向上能够区分两个目标之间的最小距离间隔。
角分辨率[2]:在测程范围内,对位于光束截面上相对光轴的两目标分辨的能力。
测距准确度[3]:所测得的目标距离值与实际距离值之间的偏差。
准测率[1-2]:达到规定测距精度的测距概率。
2 参数间的关系及决定因素
2.1 帧频与转速、扫描频率
转速是车载激光雷达一个很直观的参数,对于机械旋转激光雷达,转速指的是电机旋转速度,通常用每秒或分钟转的圈数来表示。20 r/s表示激光雷达的电机转速是每秒钟20圈。
激光雷达的帧频和扫描频率与转速直接相关,旋转一周扫描一次,扫描一次输出一帧点云。20 r/s的转速对应的帧频和扫描频率都是20 Hz。
激光雷达电机旋转速度越快,扫描速度越快,输出点云速度越快。
2.2 最大探测距离和最小探测距离
激光雷达的探测距离是最核心的性能参数。激光测距性能方程是激光测距系统设计的理论基础,用于估算激光测距系统的最大探测距离。如图1所示,激光器发出的光功率为0,光束经过光学系统和传输距离,被光学系统和大气衰减之后到达到目标物,再从目标反射光到接收光路。
到探测器的光功率为[4-5]

式中,目标物的反射率为,发射和接收光学系统的透过率分别为TT,窄带滤光片的透过率为T,大气衰减率为,目标反射表面法线与光轴之间的夹角为,接收机透镜孔径面积为A,目标距离为。
由式(1)可以看出,激光测距系统的最大测程同时取决于外部测距条件和测距系统自身性能。
在激光测距系统的设计中,必须提高激光发射单元的发射功率,增大光学系统的透过率,增大接收单元的面积,减小接收机的最小可探测功率Pmin。
和两个系数分别与光斑的大小、目标物有效发射截面积A、发射光束的远场发散角和为接收视场角相关[5]。
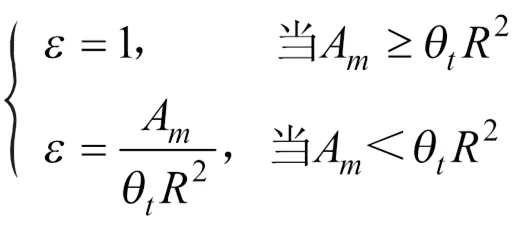
目标物有效发射截面积小于光斑面积时,发射光束的远场发散角越大,光束发散越快,接收端接收到的光功率越小。因此,发射端需要通过准直整形减小激光器的光束发散角和光斑大小。
除了最大探测距离,激光雷达内部发射光路与接收光路之间的距离会导致探测盲区产生,当探测距离低于最小探测距离时激光雷达就无法探测到目标物。
最小探测距离min的计算方式为

式中,为发射准直光路中心与接收会聚光路中心的垂直距离;为探测器的感光区域直径;为所选透镜的焦距。
2.3 视场角
激光雷达的视场角是衡量激光雷达的感知范围的一个指标。视场角越大,能感知范围更大,对于汽车驾驶的安全性更有帮助。但视场角也不是所有情况下都是越大越好,例如相同线数时,视场角越大垂直角分辨率越低。视场角需要根据具体应用环境和使用要求来选择。视场角的决定因素主要是激光雷达的扫描部分和光学设计。机械旋转扫描方式因为整个收发部分都在旋转,所以很容易实现360°的水平视场角。而转镜、棱镜和微机电系统(Micro-Electro-Mechanical System, MEMS)等扫描方式的视场角则由扫描镜对光的反射角度决定。尤其是MEMS扫描方式,由于MEMS微振镜的口径有限,激光雷达的扫描角度范围也相当有限。如果要扩大视场角,可以采用凸凹透镜组成扩角系统来进行光学扩束,增加视场角[6]。
2.4 距离分辨率
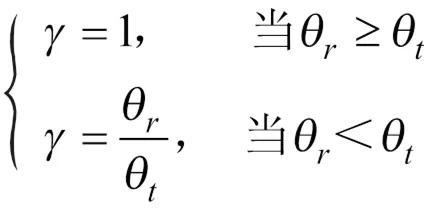
距离分辨率指的是在同一方位上,能分辨的最小距离Δ。
如图2所示,发射脉冲的宽度为,当两个回波脉冲的前沿的时间间隔Δ=2Δ/≥τ时,两个脉冲不重叠,激光雷达可以正确分辨两个脉冲,反之两个回波脉冲重叠,激光雷达无法分辨两个物体。
图2 回波脉冲示意图
因此,脉冲雷达中最小距离分辨率Δ≥/2。
由此可见,降低脉冲宽度有利于提高激光雷达的距离分辨率。
2.5 水平角分辨率和垂直角分辨率
角分辨率也是激光雷达的重要参数,决定了在一定距离时激光雷达可以识别的物体的大小。
如图3所示,假设激光雷达的垂直角分辨率为0.08°,即两个激光光束之间的角度为0.08°,那么当探测距离为200 m时,两个光束之间的距离为200 m×tan0.08°≈0.28 m。也即在200 m之后,障碍物尺寸小于28 cm就有识别不到的风险。
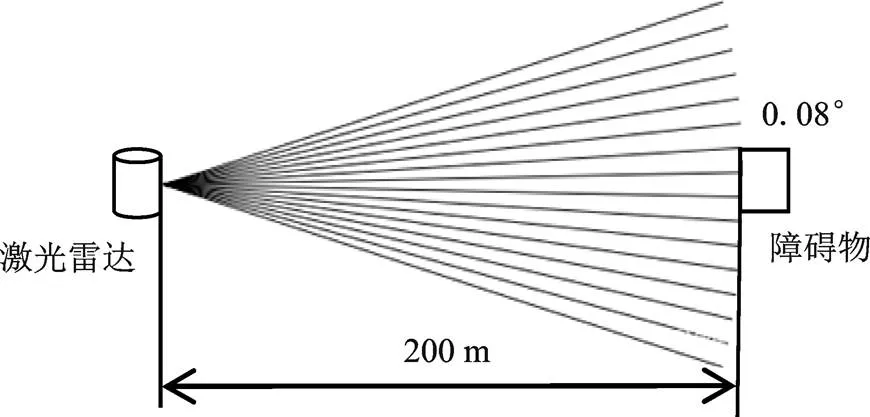
图3 激光雷达线束示意图
垂直角分辨率最直接的决定因素是激光雷达的线数,在激光雷达线束均匀分布的情况下:
垂直角分辨率=垂直视场角/线数 (5)
为了提高线数,一维扫描方案通常通过堆叠中间区域的激光器实现,二维扫描方案的线数分布可以任意变换,可根据需要调节感兴趣区域的角度范围和垂直分辨率大小。
水平角分辨率的计算公式为
水平角分辨率=视场角×转速/采样率(6)
由式(6)可见,水平角分辨率与视场角和帧频相关,不能在不看这两个参数的情况下单独看水平分辨率水平。相同视场角,采样率一定的情况下,转速越慢水平角分辨率越高。
2.6 点频
点频也叫出点数,指激光雷达每秒获取的探测点的总数目,点频的计算公式为
点频=每帧水平方向平均点数×
每帧垂直方向平均点数×帧频 (7)
对于一维扫描方式,每次扫描垂直方向平均点数就是其线数,因此
点频=(水平视场角/水平分辨率)×线数×帧频=
采样率×线数×帧频/转速=采样率×线数(8)
从以上公式可以看出,点频由激光雷达的采样率和线数决定,与帧频无关。提高帧频会使水平分辨率降低,点频保持不变。用点频参数能避免靠降低帧频提高水平分辨率来取巧。点频是激光雷达的核心性能参数,点频越多说明激光雷达对目标物的感知能力越好。
2.7 测距精度和测距准确度
测距精度和测距准确度两个参数容易相互混淆。测距精度衡量的是测试的重复性,高精度意味着对同一目标的重复测量的结果非常接近,低精度意味着测量结果在均值附近的离散性较大。测距准确度反映的是测试的距离与其实际距离的接近程度偏差。
测距精度与激光雷达的信噪比密切相关,信噪比高于一定阈值时,测距数据的分布较好地服从正态分布,随着信噪比的降低,测试数据的分布范围变大,测试精度降低[7]。
测距准确度直接正比于飞行时间的准确度。
如图4所示,激光雷达通过比较发射和反射脉冲的时间差来计算飞行时间[8]。
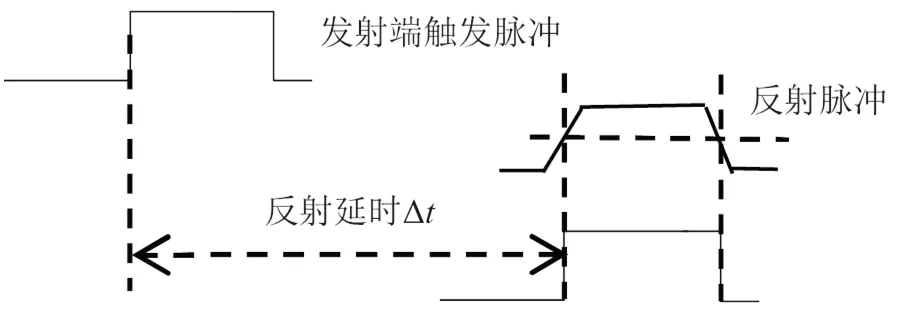
图4 激光雷达时间差测试原理
飞行时间的准确度取决于发射、接收脉冲触发时间的准确度以及内部时钟晶振的频率稳定度。发射脉冲、时钟稳定度由激光雷达的内部电路决定,接收脉冲触发时间准确度与激光脉冲形状、目标物反射特性以及背景噪声等因素相关。
3 结束语
激光雷达的应用场景多样,包括测绘、机器人、无人车、辅助驾驶等,近年来辅助驾驶车载应用场景发展迅速,激光雷达技术在不断完善和迭代。多种因素导致激光雷达性能的评价较为复杂。本文对车载激光雷达的几个关键性能参数进行详细而系统的分析,通过对参数的计算方法的分析,能够帮助理解不同参数之间的关系,以及性能参数的决定因素,对理解激光雷达的性能有重要的指导意义。
[1] 中国机械工业联合会.半导体激光测距仪通用技术条件:GB/T 29299[S].北京:中国标准出版社,2012.
[2] 兵器国营5308厂.固体脉冲激光测距仪通用规范: GJB 1324-1991[S] .北京:兵器标准化所,1991.
[3] 中国人民解放军总装备司令部. 脉冲激光测距仪性能试验方法:GJB 2241A-2008[S].北京:总装备部军标出版发行部,2008.
[4] 李庆莹.激光扫描测距系统关键技术研究[D].哈尔滨:哈尔滨工业大学,2019.
[5] 张合,郭婧,张祥金,等.半导体脉冲激光光斑整形方法研究[J] .南京理工大学学报,2010,34(5):2-3.
[6] 李小宝,王春晖,曲扬,等.三维成像激光雷达系统中的微电子机械系统扫描:扫描视场角与扩束[J] .激光与光电子学进展,2015,52(11):169-174
[7] 姜海娇,来建成,王春勇,等.激光雷达的测距特性及其测距精度研究[J].中国激光,2011,38(5):3-6.
[8] 王春勇,谢俊,卞保民,等.提高激光雷达测距精度的最佳信号门限比[J].激光技术,2007,31(4):2-3.
Key Performance Parameters and Determinants of Vehicle Lidar
CAO Li, SONG Mengyang, LING Jiuhong
( Accelink Technologies Company Limited, Wuhan 430205, China )
In recent years, the development of intelligent vehicles has greatly promoted the popularity of lidar industry. At present, there are more and more companies at home and abroad in the field of lidar. The lidar system is complex. The application scenarios are diverse, and a variety of technical routes coexist. So the evaluation of lidar performance is not simple. In particular, some parameters are easy to be confused, such as detection precision, detection accuracy and detection resolution, frame rate and point rate. In this paper, the key performance parameters of vehicle lidar were selected, and the definitions, calculation methods, interrelations and determinants of these parameters were sorted and summarized, which can help users better use lidar and guide the design of lidar.
Lidar; Keyperformance parameters; Calculation methods; Determinants;Intelligent vehicles
TN951
A
1671-7988(2022)24-196-04
TN951
A
1671-7988(2022)24-196-04
10.16638/j.cnki.1671-7988.2022.024.036
曹丽(1980—),女,硕士,高级工程师,研究方向为光电子器件、激光雷达,E-mail:li.cao@accelink.com。
猜你喜欢
纺织科学研究(2023年9期)2023-10-23 11:18:12
光学精密工程(2023年1期)2023-02-06 14:08:20
中国光学(2021年6期)2021-11-25 07:48:32
电影新作(2020年1期)2020-11-14 19:01:11
中国医疗设备(2019年1期)2019-01-15 12:10:54
电影新作(2016年6期)2016-11-20 09:04:28
测绘科学与工程(2016年5期)2016-04-17 06:51:20
视听(2016年12期)2016-03-22 03:19:06
西部广播电视(2015年8期)2016-01-16 03:45:26
激光与红外(2015年10期)2015-03-23 06:07:18