
基于双行星轮系的自动限滑差速器运动学分析与仿真
2023-01-06 09:40:52刘俊杰陈育荣孙章栋
湖北汽车工业学院学报 2022年4期
刘俊杰,陈育荣,孙章栋
(湖北汽车工业学院机械工程学院,湖北十堰 442002)
差速器是汽车驱动桥中传动系统的重要组成部件,保证车辆在转弯或不平整路面直线行驶时车轮与地面之间的纯滚动运动状态[1-2]。限滑差速器能够解决普通差速器等转矩分配的问题,提高车辆的动力性与通过性,改善车辆的操作稳定性和制动性能。近年来国内外学者对于限滑差速器进行了研究。冀杰[3]提出模型预测控制算法,提高了车辆操纵稳定性。王军年[4]设计新型的集中式电驱动桥系统,在不改变纵向总驱动力的前提下实现左右车轮驱动转矩的任意分配,有效改善了车辆操控特性。Martin Forstinger 等[5]推导出限滑差速器中行星齿轮和半轴齿轮的动力学模型,基于力平衡的方法解决仿真过程中的问题。Chen Y 等[6]提出新型的扭矩矢量差速器系统。G Ankinovich[7]等介绍了动力学分配机构的运动学设计方法,推导出可用于数学建模与车辆运动研究的方程。肖超[8]、高东俊[9]以电子限滑差速器最优滑转率为目标设计了不同的控制算法,并进行了仿真验证。肖峻[10]等建立电子限滑差速器的扭矩分配数学模型,搭建控制算法的框架,并通过联合仿真对该算法进行了分析验证。目前研究限滑差速器大多依赖电子装置控制摩擦片进行限滑,其限滑力矩较小,无法应用于商用车上,为此设计了新型纯机械式行星轮系限滑差速器。通过行星轮系和超越离合器构建成自动限滑差速器传动系统,将驱动轴转速始终控制在车辆极限转速的阈值范围内,使差速器“既能差速又能差扭”,在泥泞湿滑、冰雪地面、沙漠甚至单边车轮悬空等极端恶劣的工况下也能通过轮齿将扭矩自动传递给有附着力的车轮,使车辆能全驱行驶。
1 传动系统转速分析
车辆左转弯行驶示意图如图1所示,车辆左右两侧驱动轴的转速差为
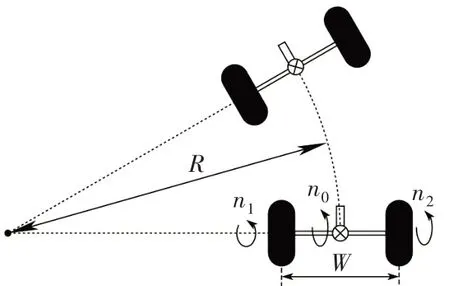
图1 车辆转弯行驶转速示意图

根据车辆的差速关系有

此时车辆的差速比k为

式中:n0为差速器壳体的转速;n1为左驱动轴转速;n2为右驱动轴转速;W为车辆的轮距;R为车辆的转弯半径。当R最小时,k最大,某型号车辆最大差速比km为25%,则车辆在不打滑正常行驶时,驱动轴的转速为0.75n0~1.25n0。
2 行星轮系限滑差速器运动学分析
行星轮系限滑差速器主要由主差速器和行星轮系差速控制器组成,其结构原理如图2所示。行星轮系差速控制器由2组行星轮系、连接轴、2个超越离合器组成。
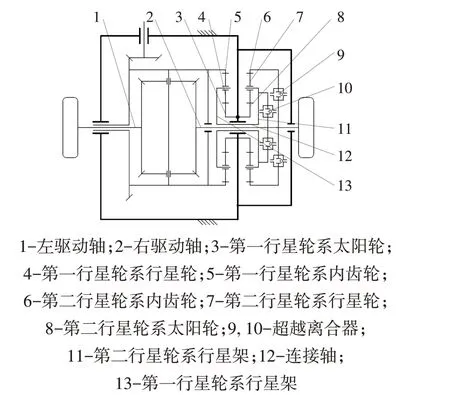
图2 行星轮系限滑差速器结构简图
第一行星轮系各部件的转速关系为

式中:n3、Z3为太阳轮转速与齿数;n5、Z5为内齿轮转速与齿数;nH1为行星架转速。太阳轮3固定在主减速器壳体上,内齿轮5 与差速器壳体连为一体,所以n5等于n0,n3等于0。合理选择Z3和Z5,使得

超越离合器10的外圈通过第二行星轮系的行星架7和连接轴12 与第一行星轮系行星架固连在一起,此时超越离合器10外圈转速n10外等于nH1;超越离合器10 内圈与右驱动轴连接在一起,则超越离合器10 内圈转速n10内等于n2。n10内大于n10外时,处于超越状态,内外圈以各自的转速运动,不影响n2;n10内小于n10外时,处于契合状态,使得n2不低于nH1。因此确保任何工况下n2不小于0.75n0。
第二行星轮系各部件的转速关系为

式中:n8、Z8为太阳轮的转速与齿数;n6、Z6为内齿轮的转速与齿数;nH2为行星架的转速。2个行星轮系的行星架通过连接轴12连在一起,齿轮8固定在主减速器壳体上,则有nH2等于nH1,n8等于0。合理选择Z6和Z8,使得

超越离合器9 外圈通过右支架与第二行星轮系的内齿轮6相连,即超越离合器9外圈转速n9外等于n6;超越离合器9 内圈与右驱动轴连接在一起,则超越离合器9 内圈转速n9内等于n2。n9内小于n9外时,处于超越状态,内外圈以各自的转速运动,不影响n2。n9内大于n9外时,处于契合状态,使得n2不高于n6。因此确保任何工况下n2不大于1.25n0。
通过2 组行星轮系与超越离合将右驱动轴转速始终限制在0.75n0~1.25n0。根据式(2),左驱动轴转速为0.75n0~1.25n0。根据运动学分析的结果绘制驱动轴转速变化曲线,如图3所示。∆n为驱动轴转速相对于差速器壳体转速的变化量,ABCD为n2的变化曲线,EFGH为n1的变化曲线。当n1处在FG段、n2处在BC段时,超越离合器均处于超越状态,车辆处于正常差速状态;当单侧驱动轴超过正常差速范围时,超越离合器通过限制右驱动轴转速,实现车辆限滑,使得车辆能够脱离单侧驱动轴打滑的困境。
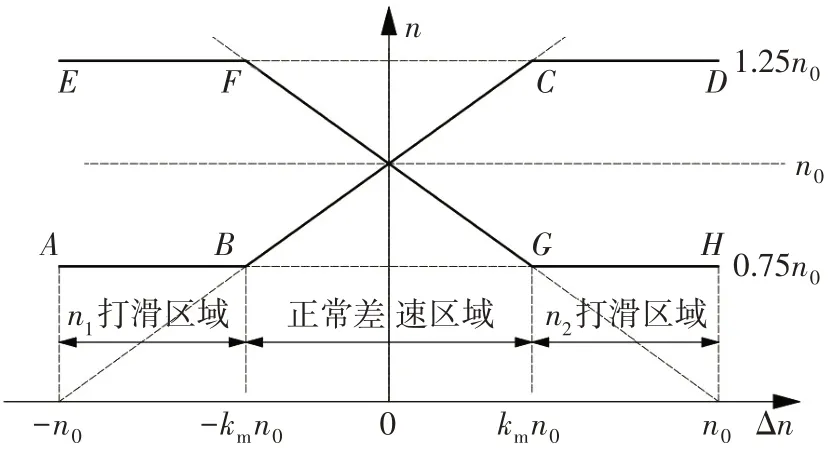
图3 左右驱动轴转速曲线图
3 行星轮系限滑差速器仿真分析
行星轮系齿轮参数如表1 所示。选用某越野车的主要参数进行计算分析,如表2所示。根据表1~2计算得到主差速器最大转矩为12013 kN·mm,作为模型仿真的输入转矩。建立行星轮系限滑差速器ADAMS 仿真模型(图4),并完成相关约束和载荷的添加。
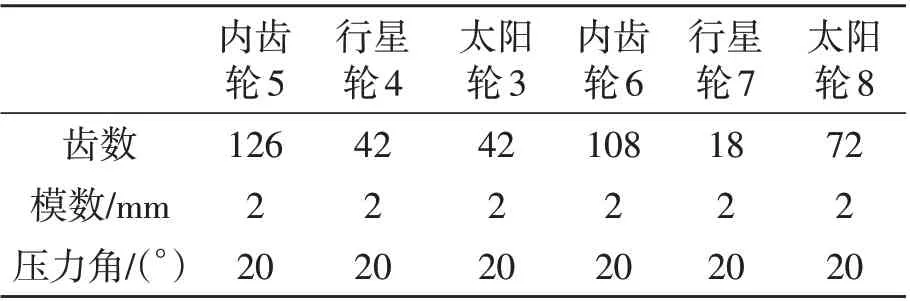
表1 行星轮系齿轮参数
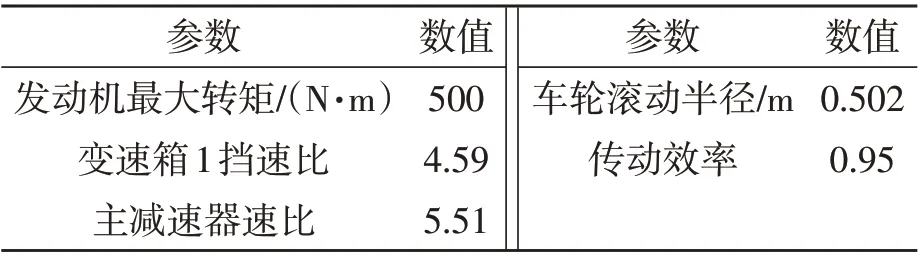
表2 某越野车主要参数
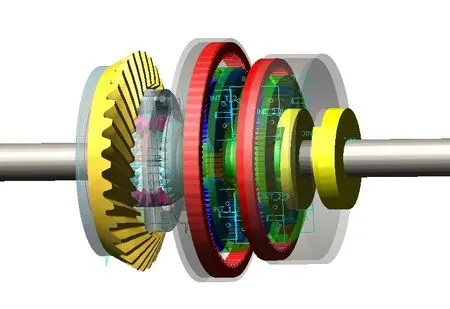
图4 行星轮系限滑差速器ADAMS仿真模型
以汽车行驶速度30 km·h-1进行仿真,为差速器壳体添加-950(°)·s-1的旋转驱动,同时添加12013 kN·mm 的转矩。为差速器单个行星齿轮添加旋转驱动,通过行星齿轮自转的转速大小和方向,模拟汽车在不同附着系数路面上的行驶状态,0~1.5 s 车辆在正常路面上直线行驶,1.5~3 s 为车辆在左侧路面附着系数较低时的行驶状态,3~4.5 s为车辆在右侧路面附着系数较低时的行驶状态[11-12]。驱动函数为

差速器壳体与驱动轴的角速度仿真曲线如图5 所示,0~1.5 s 左、右两侧驱动轴和差速器壳体角速度相等;1.5~1.75 s 左驱动轴角速度增大到1187.5(°)·s-1,右驱动轴角速度为712.5(°)·s-1,超越离合器10 限制右驱动轴角速度进一步降低;1.75~3 s驱动轴以超越离合器10限制的速度运动;3~3.5 s 右驱动轴角速度增大至1187.5(°)·s-1,超越离合器9限制右驱动轴角速度进一步增大;3.5~4.5 s驱动轴以超越离合器9限制的速度运动。
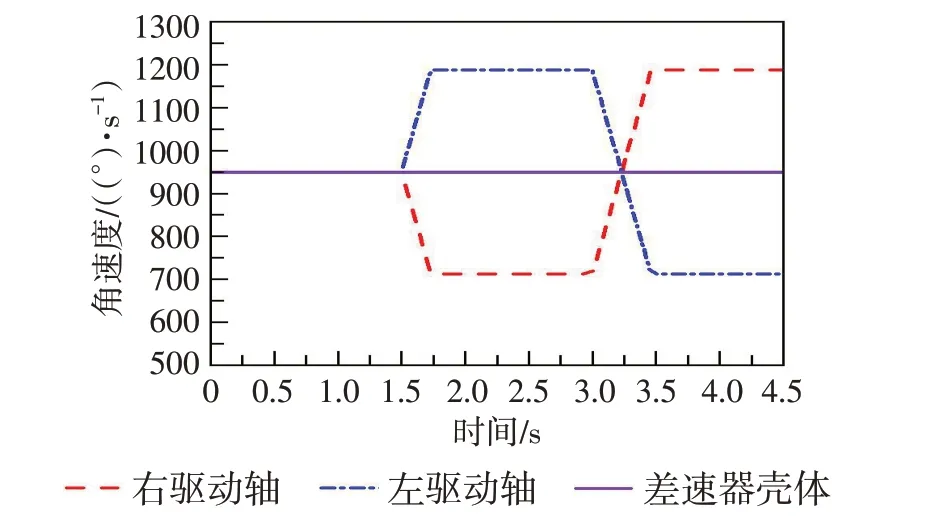
图5 差速器输入与输出角速度
驱动轴扭矩仿真曲线见图6,0~1.5 s差速器的扭矩平均分给左右两侧驱动轴;1.5~1.75 s 左侧路面附着系数降低,左侧驱动轴转速增大,差速器分配给左右驱动轴的扭矩降低;1.75~3 s超越离合器10变为契合状态,限制右侧驱动轴的最小转速,重新分配差速器的输出转矩,使右驱动轴转矩增大;3~3.5 s 左侧路面附着系数正常,右侧路面附着系数降低,右侧驱动轴转速增大,两侧驱动轴间速度差先减小后增大,差速器分配给左右驱动轴的扭矩先增大后减小;3.5~4.5 s超越离合器9变为契合状态,限制右侧驱动轴最大转速,左驱动轴扭矩增大。
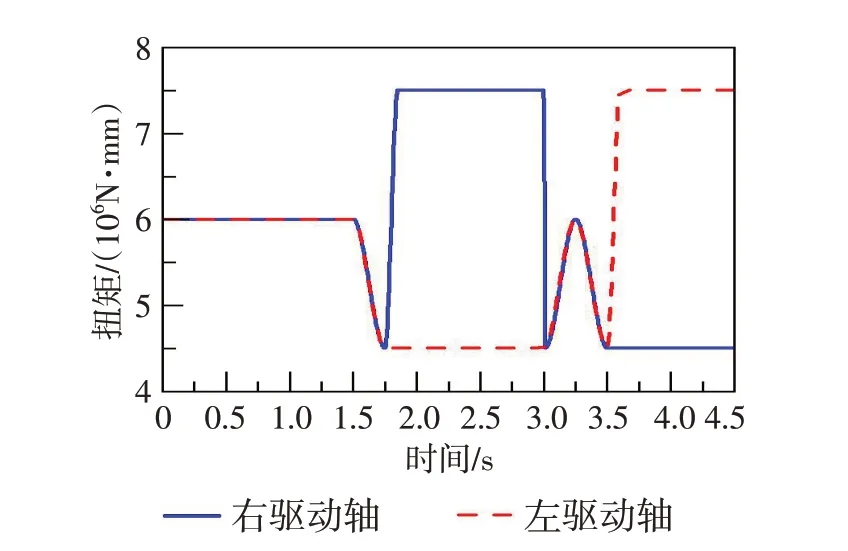
图6 驱动轴扭矩
上述结果显示:差速器在任何阶段均满足左右驱动轴角速度之和为差速器角速度的2倍,满足差速器的差速功能;当单侧驱动轴的角速度小于0.75n0或者大于1.25n0时,超越离合器能够限制右驱动轴的角速度,将差速器传递给左、右驱动轴的转矩进行重新分配,将大部分转矩传递给正常路面侧的驱动轴,实现车辆的限滑。仿真结果与理论分析的结果吻合,验证了模型的正确性。
4 结论
基于双行星轮系自动限滑差速器的传动系统结构简单,传动效率高,纯机械的机构对恶劣环境的适应性强。文中分析了车辆转弯过程中车轮转速关系,对差速器进行了运动学分析,建立仿真模型并分析,结果表明:当左、右驱动轴的转速为0.75n0~1.25n0时,超越离合器保持超越状态,不影响车辆的正常差速;当左、右驱动轴的转速超出限制范围时,超越离合器自动契合,限制驱动轴的转速,将差速器的转矩重新分配,使得地面附着系数较大侧车轮的转矩增大,从而实现车辆的限滑。
猜你喜欢
装备制造技术(2021年5期)2021-08-14 01:45:02
装备制造技术(2020年11期)2021-01-26 00:39:02
装备制造技术(2020年12期)2020-05-22 09:25:20
北京汽车(2018年4期)2018-09-08 05:37:00
制造技术与机床(2017年7期)2018-01-19 02:29:51
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
广西电力(2016年5期)2016-07-10 09:16:44
火控雷达技术(2016年1期)2016-02-06 02:18:01
陶瓷学报(2015年4期)2015-12-17 12:45:04
中国铁道科学(2015年4期)2015-06-21 06:46:06
