改进的扰动LPV系统输出反馈预测控制
2023-01-03 09:20:44王平,赵敏
电子科技 2023年1期
王 平,赵 敏
(上海理工大学 光电信息与计算机工程学院,上海 200093)
模型预测控制因其适用于处理约束和多变量问题而备受工业界青睐,是一种重要的控制技术[1-2]。文献[3]针对多面体描述的线性时变系统和线性时不变系统,提出了基于显式模型的鲁棒约束预测控制算法。文献[4]将这种思想应用于线性变参数系统,在假设系统状态精确可测的前提下,采用了一种基于拟最小最大算法的状态反馈预测控制方案。然而预测控制是基于模型的控制策略,精确的系统模型起着重要的作用,模型的不确定性在实际系统中是不可避免的,因此基于不确定模型鲁棒控制器的设计已成为一个重要的研究方向[5]。
为解决这一问题,文献[6~8]针对带有输入约束的LPV(Linear Parameter Variable)系统,采用了一种基于输出反馈的MPC(Model Predictive Control)方法。该MPC方法在线设计鲁棒状态观测器,基于状态观测器在线获得系统每一时刻状态的估计值,通过设计鲁棒输出反馈控制器得到最优控制律,保证了受输入约束系统的鲁棒稳定性。文献[9~12]采用一种基于拟最小最大算法的输出反馈鲁棒预测控制策略,基于线性矩阵不等式设计离线鲁棒状态观测器,利用鲁棒状态观测器观测系统状态,进而在线通过鲁棒输出反馈预测控制算法,得到最优控制律。虽然该算法考虑了LPV系统的不确定因素,但是难以保证受扰动系统的渐近稳定性。因此,本文将给出一种新的输出反馈预测控制方法来解决这一问题。
针对一类带有有界状态干扰的多胞描述LPV系统,本文以保证系统的渐近稳定性为目标,提出一种鲁棒预测控制改进方法,并设计了输出反馈控制器。该控制器考虑了无扰动LPV模型,基于线性矩阵不等式求解最小最大鲁棒输出反馈控制律;随后,获得保证扰动LPV系统鲁棒渐近稳定的最优偏移量,与无扰动系统反馈控制律组合得到最优控制律,并施加于实际系统;最后,证明了扰动LPV系统的渐近稳定性。
1 问题描述
考虑以下不确定LPV系统
xc(k+1)=A(ρ(k))xc(k)+B(ρ(k))uc(k)+w(k)
yc(k)=C(ρ(k))xc(k)
(1)
式中,uc(k)∈Rnu、xc(k)∈Rnx、yc(k)∈Rny分别为系统的控制输入、不可测状态以及可测输出;w(k)⊂W为有界干扰,且W⊂Rnx;A(ρ(k))、B(ρ(k))、C(ρ(k))属于多面体矩阵集合
[A(ρ(k))|B(ρ(k))|C(ρ(k))]∈Ω
(2)
其中
Ω=Co{[A1|B1|C1],[A2|B2|C2],…,[Al|Bl|Cl]}
(3)
式中,Co为凸包;{[A1|B1|C1],[A2|B2|C2],…,[Al|Bl|Cl]},j∈{1,2,…,l}为多面体Ω的顶点;l为多面体顶点的个数。
假设1ρ(k)在k时刻可测量,即[A(ρ(k)),B(ρ(k)),C(ρ(k))]在k时刻已知。
假设2(A(ρk)),B(ρ(k)))以及(C(ρ(k)),A(ρ(k))),对于所有k≥0为完全可控可观。
本文针对如式(1)所示的带有有界状态干扰的不确定LPV系统,设计输出反馈鲁棒预测控制器,得到最优控制律,并施加于该系统,保证了扰动LPV系统的鲁棒渐近稳定性。
2 无扰动LPV系统控制器设计
考虑无扰动LPV系统模型如式(4)所示。

(4)
为求取控制律使如式(4)所示的系统渐近稳定,首先提出一种鲁棒状态观测器的离线设计方法;进而构造具有LMI(Linear Matrix Inequality)约束的在线优化MPC问题;最后通过求解该优化问题得到最小最大鲁棒输出反馈控制律。
2.1 离线状态观测器设计
由于如式(4)所示的系统状态不可测,故采取如下所示的状态观测器[13]
x0(k+1)=A(ρ(k))x0(k)+B(ρ(k))u(k)+
Lpy(k)-C(ρ(k))x0(k))
(5)
式中,x0(k)、u(k)、y(k)分别为估计状态、控制输入以及可测输出。为确定观测器增益Lp,定义该系统的估计误差e(k)=x(k)-x0(k),则下一时刻
e(k+1)=(A(ρ(k))-LpC(ρ(k)))e(k)
(6)
定义一个二次函数
(7)
且满足二次稳定性条件
E(e(k+1))-μE(e(k))≤0
(8)
式中,μ(0<μ<1)是预先指定的衰减率,可保证当k→∞时,e(k)→0。将式(6)和(7)代入(8)中,且左右分别乘以对角矩阵{I,Pe},令Ye=LpPe,可得
(9)
通过求解以下优化问题可得Lp。
(10)
2.2 在线输出反馈预测控制
为保证式(4)的渐近稳定性,引入以下预测模型[14]
g(k+1+i|k)=A(ρ(k+i))g(k+i|k)+
B(ρ(k+i))u(k+i|k)
(11)
g(k+1|k)=x0(k+1)
式中,i≥1;g(k+i|k),u(k+i|k)分别为式(4)在k时刻预测k+i时刻的系统状态以及控制输入。令g(k|k)=x0(k),u(k)=u(k|k),未来控制律描述为
u(k+i|k)=F(k)g(k+i|k)
(12)
式中,F(k)为k时刻确定的反馈增益。
针对式(4)在每个时刻求解如下最小最大优化问题
(13)
式中
(14)
同时二次函数V(g(k+i|k))满足以下约束条件[15]
(15)
由鲁棒稳定性可得g(∞|k)=0,即V(g(∞|k))=0,将式(15)左右两端从i=1到∞分别相加可得
(16)
式中
V(g(k+1|k))=g(k+1|k)TP(k)g(k+1|k)
(17)
对系统性能附加约束
(18)
其中γ(k)是待最小化的非负变量。
基于式(15)、式(18),可将所提出的最小最大优化问题修改为
(19)
为保证式(19)的鲁棒稳定性,附加如下所示的稳定性条件。
γ(k)<γ(k-1)
(20)
在满足式(15)、(20),式(18)的条件下,解决式(19)可得控制律u(k)及反馈增益F(k),因此,设计上述鲁棒控制器的问题可转化为一个带有LMI约束的优化问题,如下定理所示。

(21)
s.t.式(4)、式(5)、式(13)
(22)
(23)
γ(k)-γ(k-1)<0
(24)
式中
(25)
若对于给定的x0(k)和y(k)存在u(k|k)、Y(k)、Q(k),则反馈增益F(k)可由F(k)=Y(k)Q(k)-1计算得到。
证明将式(18)中P(k)替换为γ(k)Q(k)-1可得
1-Ψ(k)-T(k)TQ(k)-1T(k)>0
(26)
式中
(27)
通过应用Schur补定理,可得
(28)
式中
(29)
同理对式(28)应用Schur补定理,由此可得式(22),因此式(18)可由式(22)保证。
令u(k+i|k)=F(k)g(k+i|k) (i≥1),将式(12)代入式(15),可得
ζ(k)-ξ(k+i)TP(k)ξ(k+i)>0
(30)
其中
(31)
式(30)两边分别乘以γ(k)P(k)-1,令P(k)=γ(k)Q(k)-1且应用Schur补定理可得到
(32)
式中
(33)
令Y(k)=F(k)Q(k)后应用Schur补定理可得
(34)
式中
R(k)=A(ρ(k+i))Q(k)+B(ρ(k+i))Y(k)
(35)
将不等式(34)映射于式(36)中
[A(ρ(k+i))|B(ρ(k+i))|C(ρ(k+i))]∈Ω
(36)
若存在Q(k)和Y(k)使式(34)成立,则可证得式(23)成立,因此式(15)可由式(23)保证,此时证毕。
定理2(递归可行性) 对于式(21),若k时刻能确定一个递归可行解,则在所有t>k时刻,式(21)都是有解的。
证明若证明k时刻得到的优化问题的解是k+1时刻的可行解。设

(37)
基于式(5)、式(11)、式(24)及式(37),则式(22)和式(24)可被改写为
(38)
式中
(39)
由于式(23)在k时刻被满足,所以式(38)成立,因此若能在k时刻确定一个可行解,则式(21)在k+1时刻可行;证毕。
定理3(渐近稳定性) 式(21)的可行解保证系统的渐近稳定性,即当k→∞时,x(k)→0。
证明若式(21)对于所有步骤可行,基于式(15)的式(24)保证g(k+1|k)收敛到0,此外从状态观测器的设计中可保证当k→∞时,e(k)→0,即估计状态x0(k)收敛于式(4)真实状态x(k),因此式(21)的可行解保证系统的渐近稳定性,即k→∞时,x(k)→0,此时证毕。
综上所述,本文针对无扰动系统模型提出的在线优化MPC问题描述如下

(40)
通过求解式(40)可获得基于输出反馈的鲁棒预测控制律u(k+i|k),保证无扰动LPV系统的渐近稳定性,下面则考虑在有界状态干扰的情况下,如何求取最优控制律。
3 扰动LPV系统最优控制律
考虑扰动LPV系统,由于式(1)状态xc(k)不可测,采取如下所示的状态观测器
xc0k+1)=Aρk))xc0k)+Bρk))uk)+
Lpyk)-Cρk))xc0k))
(41)

uck)=uk)+Kxc0k)-x0k))
(42)
由式(42)可得,xc0(k)与x0(k)的差值可分别基于式(41)、式(5)得到,u(k)可通过求解式(40)得到,而反馈增益K未确定,故下面通过状态反馈确定反馈增益K,根据式(5)、式(41)定义z(k)=xc0(k)-x0(k)为控制误差,则下一时刻控制误差
(43)
式中,ec(k)、e(k)分别为式(1)、式(4)的估计误差,基于上述离线状态观测器的设计可得,当k→∞时,ec(k) →0,e(k) →0。因此为使式(43)稳定,(A(ρ(k))+B(ρ(k))K)一定趋于0,根据式(43)可得[16]

(44)
定义二次函数
(45)
并满足以下二次稳定性条件

(46)
其中,α(0<α<1)是预先指定的衰减率,将式(44)、式(45)代入式(46)中可得
(47)
将式(47)左右分别乘以{I,Pz},并令Yz=LpPz,有
(48)
故求取下列优化问题即可确定反馈增益K。
(49)
最后根据式(42)可得最优控制律uc(k)。
定理4最优控制律uc(k)施加于扰动LPV式(1)中,保证了扰动LPV系统的鲁棒渐近稳定性。
证明状态反馈增益K可保证当k→∞时,(A(ρ(k))+B(ρ(k))K)→0,且当k→∞时,ec(k)→0,e(k)→0,因此由式(43)可得,当k→∞时,控制误差z(k)趋于0,所以xc0(k)最终会收敛到x0(k)。无扰动控制律的设计保证式(4)的渐近稳定性,即当k→∞时,x0(k) →0,因此当k→∞时,xc0(k) →0;又因为当k→∞时,ec(k) →0,所以式(1)的估计状态xc0(k)将会收敛到式(1)的实际状态xc(k),即当k→∞时,xc(k)→0;由此可得将最优控制律uc(k)施加于式(1)中,保证式(1)的鲁棒渐近稳定性;证毕。
当系统的初始状态在某一输入的驱动下,系统从这一初始状态运动到末态,若存在扰动使系统的初始状态在某一范围内发生偏移,但系统的终态仍能回到给定的末态范围内,则称该系统是稳定的,这就是普通意义上的稳定性。而渐近稳定性是稳定性的一种,它要求当时间趋于无穷时,当系统的初始状态在某一范围内,系统的终态会回到零点。可见渐近稳定比稳定对系统的要求严格,前者只需系统末态所在的范围是零点周围的一个区域,而后者要求系统末态趋近的这一点必须是零点,这就是渐近稳定性与稳定性的区别。通过上述定理4的证明,说明本文所提出的方法控制性能较好,能够保证扰动LPV系统的渐近稳定性。算法具体步骤如下文所述。
离线阶段步骤:
步骤1计算Lp、K;选择合适的L和R;
步骤2选择合适的衰减律μ(0<μ<1)、α(0<α<1)使得式(10)、式(49)可行。
在线阶段(k≥0)步骤:
步骤1在k= 0时刻,分别选定式(4)、式(5)的初始状态x(0)、x0(0);
步骤2在k≥0时刻,根据式(5)得到x0(k),根据式(41)得到xc0(k),并计算xc0(k)-x0(k);
步骤3基于式(5)在线求解式(40)获得控制输入u(k)以及反馈增益F(k);
步骤4计算uc(k)=u(k)+K(xc0(k)-x0(k)),并将uc(k)施加于实际系统中;
步骤5重复在线阶段的步骤2,直至xc0(k)=0,结束。
4 数值例子
通过下面的数值算例证明该方法的有效性,首先给出如下所示的LPV系统

(50)
引用模型系数[17]
(51)
给式(50)加入有界扰动w(k)∈W
W={w∈R2||w|∞≤0.01}
根据反馈增益K、式(5)以及式(41)每一时刻所估计的状态值可得到每一时刻的扰动LPV系统控制输入的偏移量,随后在线求解式(40)得到无扰动系统控制输入u(k),最后将无扰动控制律组合最优偏移量得到式(50)的最优控制律u*(k)。下面将对文献[10]中的方法与本文中的方法做对比分析。
由图1可以看出,文献[10]所提出的方法能够保证扰动LPV系统的末态进入零点周围的一个区域,但是难以保证扰动LPV系统的渐近稳定性;而本文所提出的方法可使得扰动LPV系统状态更快地进入稳态,并且能够保证扰动LPV系统的渐近稳定性,因此本文所提出的方法要优于文献[10]。本文中,在MPC的设计中考虑到了有界状态干扰所造成的偏移量,因此相比于未考虑扰动的MPC方法[18],本文所提出的方法在实际生活中更加具有通用性。存在干扰的式(50)估计状态与实际状态的横、纵坐标分别绘制在图2、图3中,估计状态轨迹的坐标设定从[-0.8,-0.2]开始,实际状态轨迹坐标设定从[-1,1.2]开始,图2以估计状态与实际状态的横坐标为y轴,以时间为x轴。
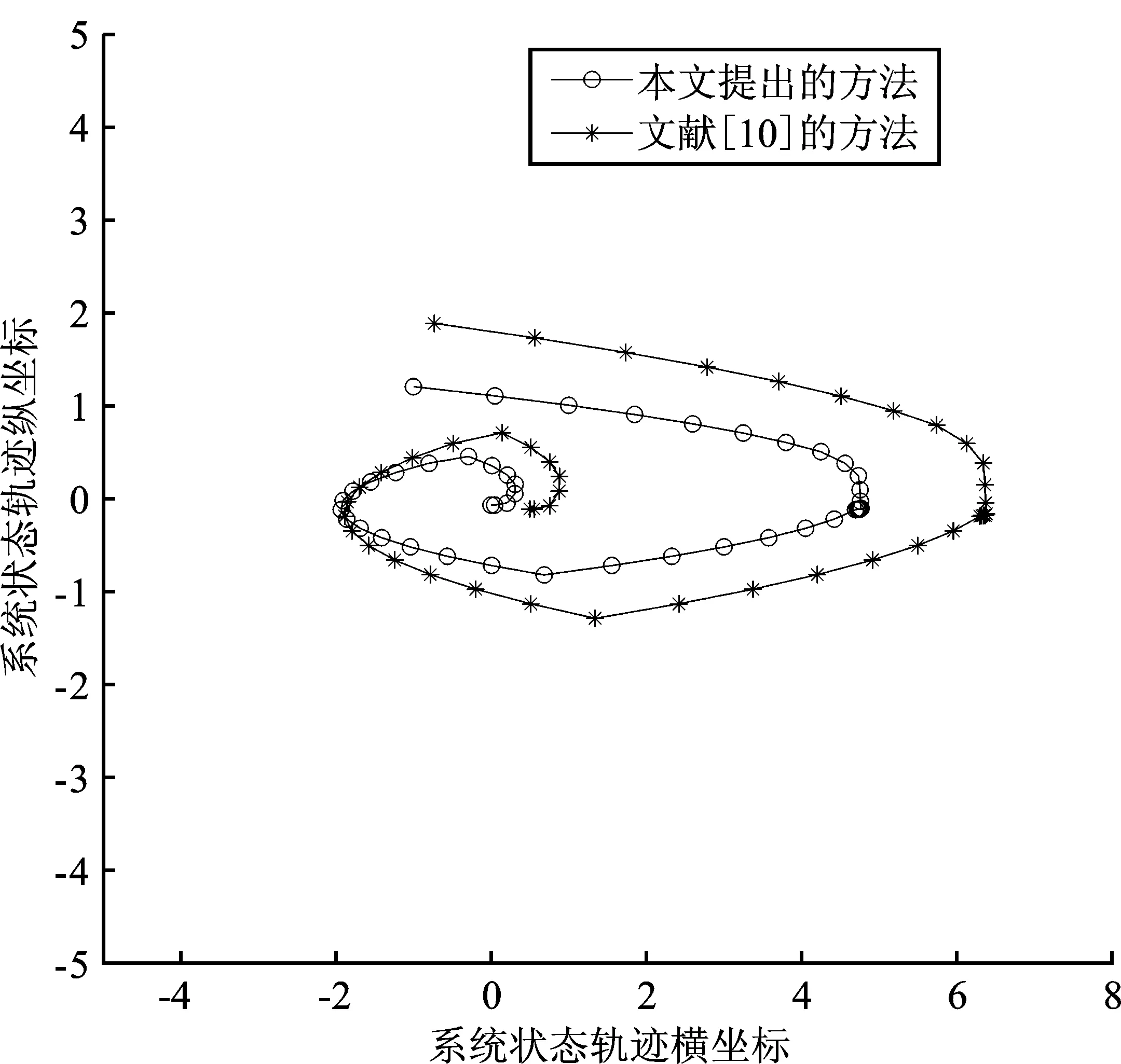
图1 系统状态轨迹对比图Figure 1. Comparison diagram of system state trajectories
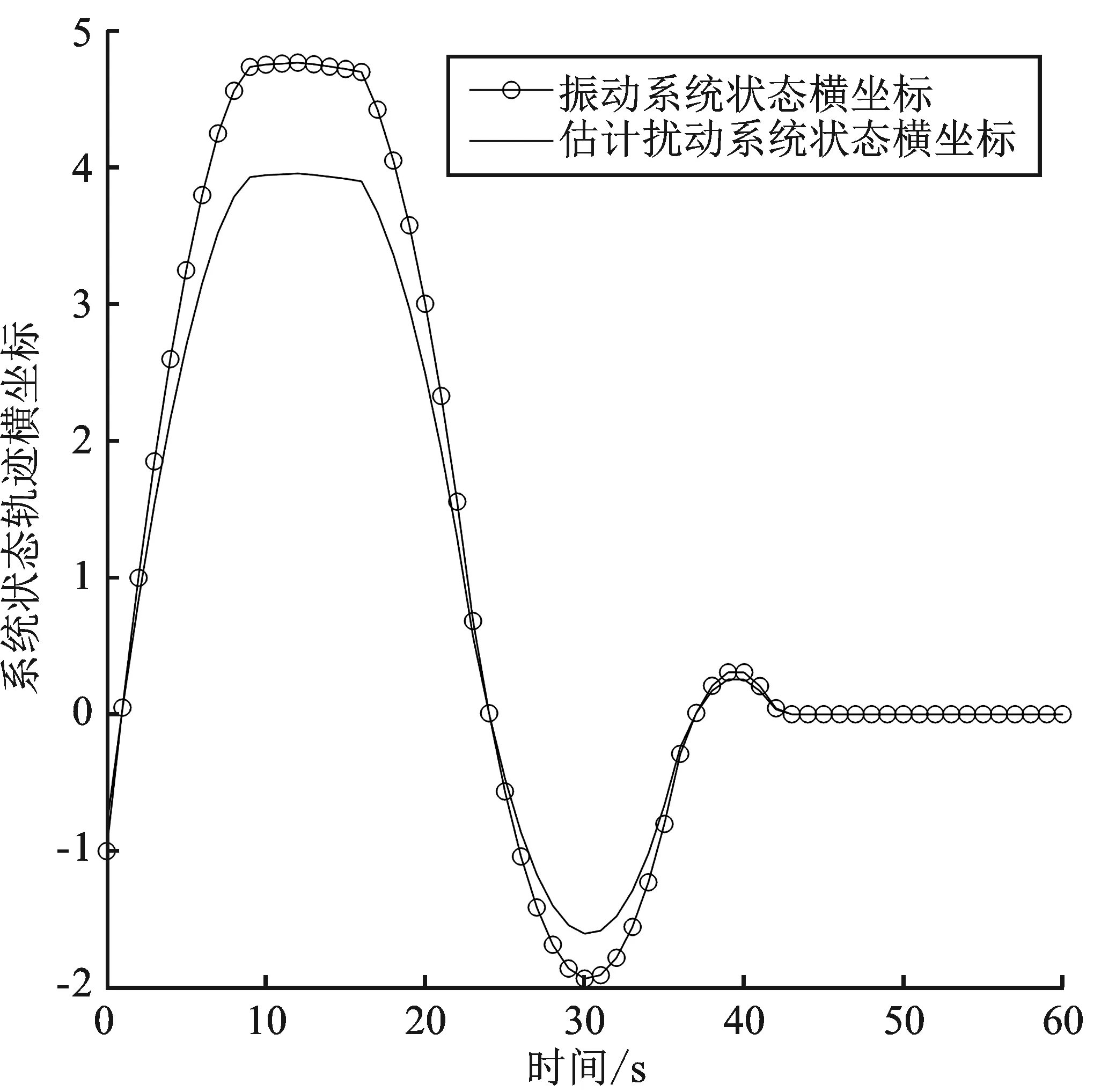
图2 估计状态与实际状态横坐标轨迹Figure 2. Estimated and actual state abscissa trajectories
图3以估计状态与实际状态的纵坐标为y轴,以时间为x轴。
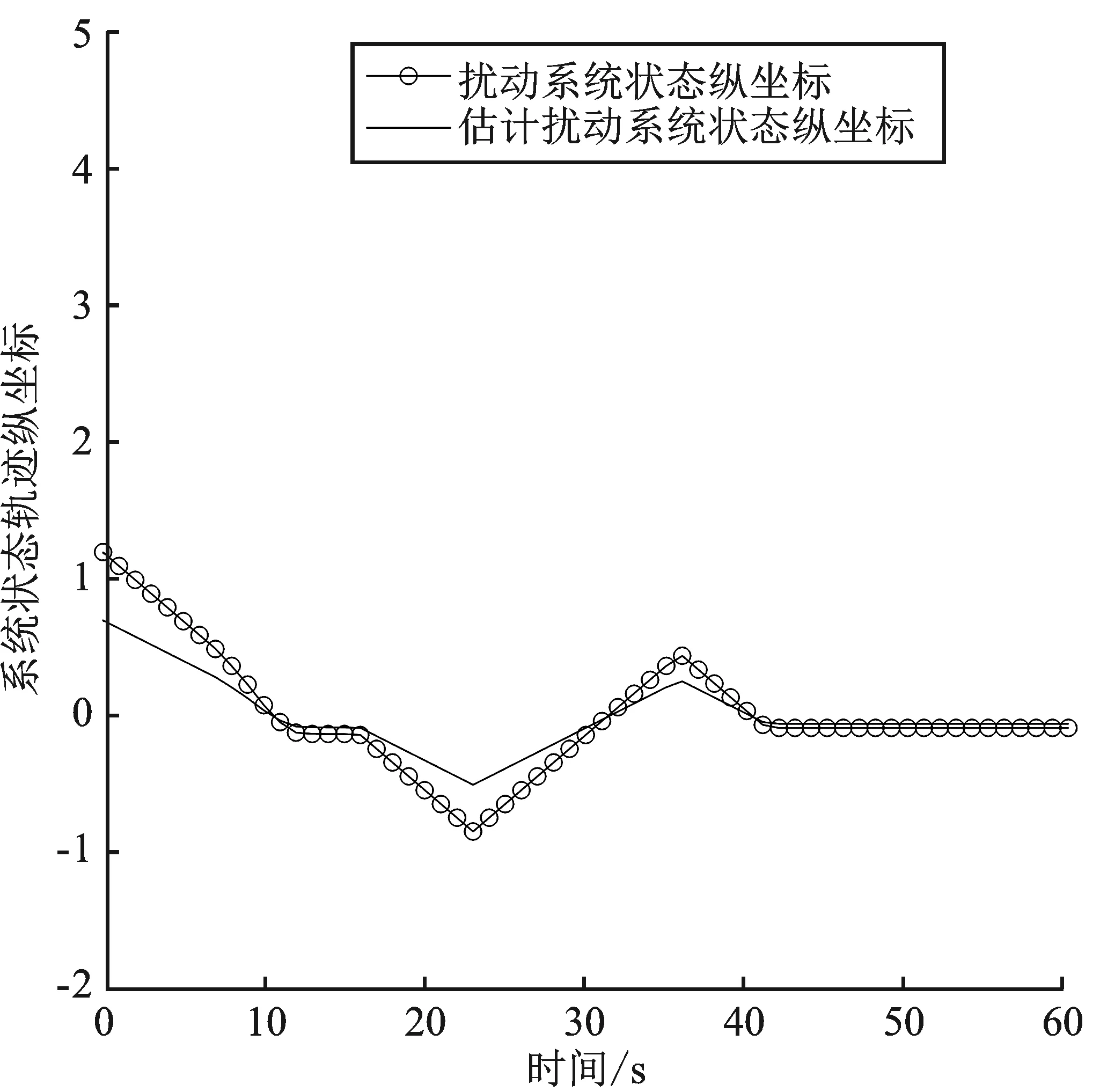
图3 估计状态与实际状态的纵坐标轨迹Figure 3. Estimated and actual state longitudinal trajectories
由图2、图3可以看出,式(50)估计状态与实际状态的坐标轨迹最终汇合并且收敛于0,所以表明本文所提出的状态观测器效果良好。系统的最优控制律如图4所示。
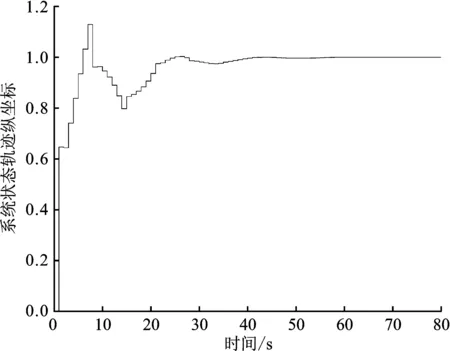
图4 扰动LPV系统的最优控制律Figure 4. Optimal control law for a perturbed LPV system
由图4可以看出,本文所提出的方法具有递归可行性,每一时刻都可求得最优控制律。该仿真针对二维系统,只有两个变量,当变量个数增加后,系统维数增加,若采用本文方法,计算量会增大,因为相对应的矩阵维数会随之增加,因此基于线性矩阵不等式的在线优化问题的求解,离线状态观测器增益以及反馈增益K的确定都更加繁琐。对于高维数系统的渐近稳定性而言,定理4同样适用于高维数系统,因此当系统维数增高,本文所提出的方法同样可保证系统的渐近稳定性。
5 结束语
本文针对一类带有有界状态干扰的多胞描述LPV系统,提出了一种改进鲁棒预测控制方法,设计了可保证系统渐近稳定的输出反馈控制器。该控制器考虑无扰动LPV系统模型,基于LMI约束求解输出反馈控制律。为抵消有界状态干扰,本文设计并求取扰动LPV系统控制输入的最优偏移量,基于无扰动系统模型求取的控制律组合最优偏移量即可得到扰动LPV系统的最优控制律,最后将最优控制律施加到实际系统中,并通过仿真实验验证了算法的有效性。
猜你喜欢
数学年刊A辑(中文版)(2021年1期)2021-06-09 09:32:02
自动化学报(2019年6期)2019-07-23 01:18:18
数学物理学报(2019年3期)2019-07-23 01:15:38
数学物理学报(2018年3期)2018-07-17 06:15:30
自动化学报(2017年4期)2017-06-15 20:28:54
通信电源技术(2016年4期)2016-04-04 02:57:30
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:42
电测与仪表(2015年19期)2015-04-09 11:32:56