基于五电平变换器的开关磁阻电动机转矩脉动抑制方法
2023-01-03 05:07杜钦君杨姝欣罗永刚
上海交通大学学报 2022年12期
凌 辉, 杜钦君, 冯 晗, 庞 浩, 杨姝欣, 罗永刚
(山东理工大学 电气与电子工程学院,山东 淄博 255022)
开关磁阻电动机(Switched Reluctance Motor,SRM)结构简单、成本低,转子上没有绕组,适合高速运转的场合.但由于其定转子为双凸极结构,开关磁阻电动机的磁链与转矩对转子位置角和相电流都表现为强烈的非线性关系[1-2],使得电动机转矩脉动大,制约开关磁阻电动机在机床、伺服、电动车等对转矩脉动要求高的场合下的应用.
围绕开关磁阻电动机转矩脉动的抑制,许多学者从不同角度提出解决方案,主要从两方面着手.一方面从电动机本体出发,改进电动机的结构设计,实现减小转矩脉动的效果.文献[3]提出在转子两侧开槽的方式,该方法改变转子表面磁密的方向,达到削弱径向磁密,减小转矩脉动的效果.文献[4]采用转子带极靴(T型)的转子齿形,利用三维有限元建模仿真,证明T型齿能够减小径向力,增加切向力,从而有效降低转矩脉动.另一方面对控制策略进行优化,以达到脉动抑制的效果.文献[5-7]引入直接瞬时转矩控制(Direct Instantaneous Torque Control,DITC)的概念,将瞬时转矩作为直接控制对象,控制其跟踪转矩参考值,并设定单相和两相导通时的导通逻辑.但由于该策略没有考虑相电流波形以及在换向初期相电感变化率较低,导致在该时期相电流有明显的电流峰值脉动,造成较大的转矩脉动.文献[8-9]将直接瞬时转矩控制和脉冲宽度调制(Pulse Width Modulation, PWM)相结合,对相电压进行脉宽调制,等效改变相绕组的平均电压,在不同转速和负载下都有良好的电流跟踪效果.值得注意的是,由于传统不对称半桥功率变换器能提供的电压等级较少,所以该方法只能在低中转速下有较好的电流跟踪和转矩抑制效果;在高转速下,即使绕组全电压也无法保证电动机达到理想的转矩跟踪效果.文献[10]在直接转矩控制中加入模糊控制,提高动态响应速度.文献[11]将全桥功率变换器引入开关磁阻电动机驱动,减少器件成本,但控制器的设计更加复杂.文献[12-13]分别引入五电平和四电平拓扑结构,结合滞环控制设计不同导通区间的控制策略,有效减小转矩脉动,改善转矩的动态特性.文献[14]提出一种新型有源升压功率变换器,可实时控制绕组退磁电压,结合瞬时转矩控制策略设计新型转矩控制器,实现转速和负载变化较大情况下开关磁阻电动机低转矩脉动运行.文献[15]在传统DITC的基础上引入自适应最优开通角的转矩分配函数,利用反向传播神经网络训练预先获得的任意转速下的最优开通角,实现电动机运行时自适应调整开通角,抑制换相区域的转矩脉动.
本文提出一种五电平拓扑下的改进DITC控制方法,设计一种不对称二极管钳位型五电平功率变换器(Five-Level Asymmetrical Diode-Clamped Converter,5L-ADCC)拓扑,该变换器可提供较高的电压等级,实现绕组快速励磁和去磁.其次,根据SRM的电感曲线和矩角特性曲线重新划分导通区间,避免换向初期电流峰值较大,合理分配各相通断.另外,考虑到转速及绕组电压对电流跟踪效果的影响,分别设计低速与高速下的DITC导通规则,根据当前转速、转矩误差以及转子位置选择适配的电压矢量,使得系统在低速与高速时均达到良好的电流跟踪效果,从而实现宽速域下SRM转矩脉动的抑制.最后,通过仿真验证该方法的有效性.
1 传统DITC策略
不同于电流斩波、转矩分配等间接转矩控制方式,直接瞬时转矩控制将任一时刻的瞬时转矩作为直接控制量,令其跟踪转矩参考值,根据转矩误差和位置信号实时改变不对称半桥功率变换器的开关状态,灵活分配变换器的3种电平,达到减小转矩脉动的目的.传统DITC系统主要包含转矩滞环控制器、区间判断模块、不对称半桥功率变换器、转矩估算单元、SRM本体模块等,DITC系统框图如图1所示.图中:ωref为参考角速度;ω为瞬时角速度;Δω为角速度误差;Tref为参考转矩;T为瞬时转矩;ΔT为转矩误差;θ为转子位置角;i为相电流;t为时间.
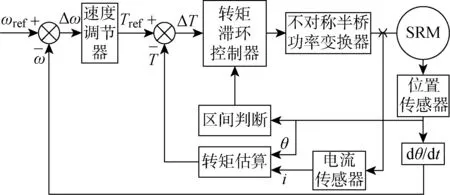
图1 传统DITC系统框图Fig.1 Block diagram of traditional DITC system
1.1 瞬时转矩计算
(1)
式中:Tk为第k相绕组的电磁转矩;ik为第k相电流;绕组的磁共能表达式为
(2)
式中:ψk为第k相磁链.
为方便分析SRM的基本电磁关系,忽略磁饱和的影响,电感Lk与相电流ik无关,理想线性模型下SRM的电磁转矩可表示为
(3)
实际上,SRM内部非线性严重,其转矩-电流-角度关系一般通过实验或有限元仿真获得.图2为Ansoft软件得到的静态矩角特性曲线,以定转子凸极对齐位置为0°位置,当转子位置达到30° 即不对齐位置时,电感变化率为正,电动机开始输出正转矩.
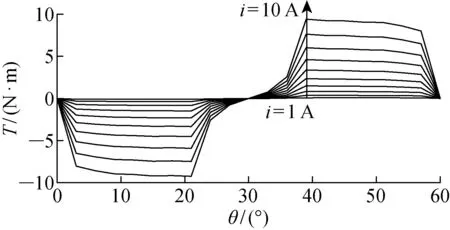
图2 矩角特性Fig.2 Characteristic of torque-angle
1.2 DITC驱动电路分析
传统DITC采用不对称半桥驱动电路,各相独立工作,根据DITC导通规则得到各相的驱动信号从而驱动开关管导通或关断.以A相为例,图3给出不对称半桥变换器的3种开关信号.图中:D1、D2为二极管.通过对S1、S2两个开关管的通断进行组合可实现励磁、续流、去磁3种开关状态.
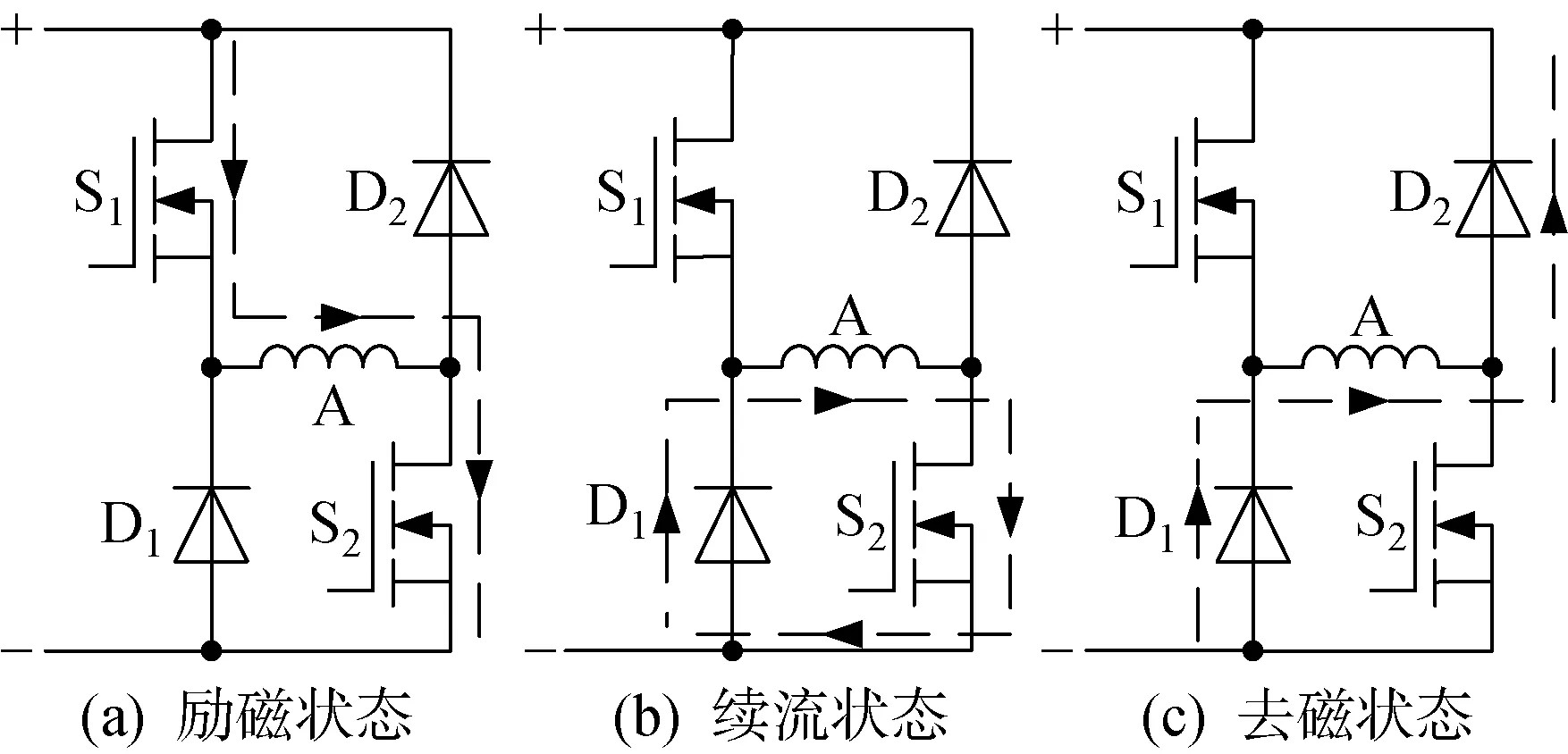
图3 不对称半桥变换器开关状态Fig.3 Switching state of asymmetrical half bridge converter
1.3 DITC原理分析
DITC系统是转速转矩双闭环的调速系统,其核心为转矩滞环控制器,根据转矩误差产生驱动信号,调节瞬时转矩的大小并实时跟踪转矩参考值.根据不同转子位置,每相导通区域分为单向导通区和两相导通区.以D、A两相为例说明导通关系如下:在单相导通区,只有D相能提供转矩输出,其他相关断,故采用单滞环控制.当转矩误差大于内滞环上限时,D相加正电压励磁,增加转矩;当转矩误差减小到内滞环下限时,D相绕组加零电压续流,缓慢减小转矩.在两相导通区,D、A两相同时输出转矩,瞬时转矩控制较复杂,故采用双滞环控制.当转矩误差大于内滞环上限时,A相绕组加正电压,D相保持不变;若转矩误差继续增大到外滞环上限,D相绕组也加正电压励磁,迅速增加转矩;若转矩误差小于0,为了使A相能产生转矩逐渐代替D相,只令D相绕组续流,A相保持不变;若转矩误差进一步减小到内滞环下限,A相绕组也零压续流;若转矩误差仍然减小到外滞环下限,则D相绕组加负电压,迅速减小转矩[5].
2 基于5L-ADCC拓扑的改进DITC策略
传统DITC根据电感变化和不对称半桥的工作状态采用滞环控制,使瞬时转矩实时跟踪参考值,起到较好的控制效果.电动机第k相电压平衡方程式为
Uk=Rkik+dψk/dt
(4)
式中:Uk、Rk分别为第k相绕组电压、内阻.忽略电动机内阻压降,代入ψk=Lk(ik,θ)ik,可得
(5)
式中:wr为转子机械角速度.则在θ处的电流变化率可表示为
(6)
由式(6)可知,此时若电动机低速运行,旋转电动势较小,电流变化率较大,在换相期间导通相电流建立迅速,但在最小电感恒值(Lmin)区域,旋转电动势为0,电流变化率为
(7)
这表明相电流在此区域线性上升,电流峰值高,可提高电动机的出力,但会引起转矩向上的脉动,增大震动和噪声[1].文献[16]针对电动机转速对开关角实时优化,虽然避免了相电流幅值过大,但在最小电感区域仍存在电流峰值,使系统效率降低.
当电动机高速运行时,旋转电动势增大,不对称半桥提供的的电压等级无法实现良好的电流跟踪性能[8],电流无法及时跟踪所需值,转矩控制效果变差,转矩动态性能下降.
由以上分析可知,传统DITC在转速工况变化较大时无法兼顾转矩脉动和运行效率的问题.为此,提出5L-ADCC拓扑的改进DITC策略.根据电感及转矩随转子位置的变化曲线,重新划分区间,分别设计低转速和高转速下不同的导通规则.在实现过程中,首先判断当前转速处于低速还是高速状态,以额定转速(ne)的1/2作为临界转速,若当前转速大于临界转速则采用高速下的DITC导通规则,根据转矩误差和绕组所处导通区间输出高电平开关信号,实现五电平驱动;同理,若当前转速小于临界转速则采用低速下的DITC导通规则,根据转矩误差和绕组所处导通区间输出低电平开关信号,实现三电平驱动.5L-ADCC拓扑下的改进DITC系统框图如图4所示.
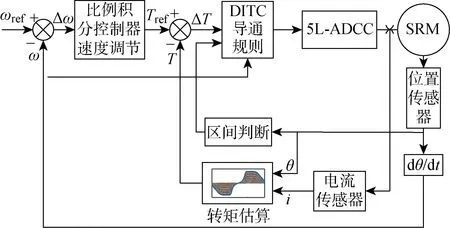
图4 5L-ADCC拓扑的改进DITC系统框图Fig.4 Block diagram of improved DITC system based on 5L-ADCC topology
2.1 不对称二极管钳位型五电平变换器拓扑
不对称半桥功率变换器提供的电压等级较少,为提高转矩控制的灵活性,提升绕组电流变化率,提出一种不对称二极管钳位型五电平功率变换器,如图5所示.A、B、C、D分别为SRM的四相绕组;U为电源电压;Un为中点电位电压;S3~S12为开关管;D3~D12为二极管;CU、CL为电源两侧的分压电容,在不同开关状态下,电容器会进行充电或放电,中点电位也会发生变化.由图5可知,A、C两相共用S3、S4和D4,B、D两相共用S9、S10和D10.在DITC系统中,绕组最多导通两相,因此电动机绕组按顺序导通时各相可独立控制.相比文献[17]中的功率电路,所提5L-ADCC电路在实现五电平驱动的同时,所需功率器件更少.
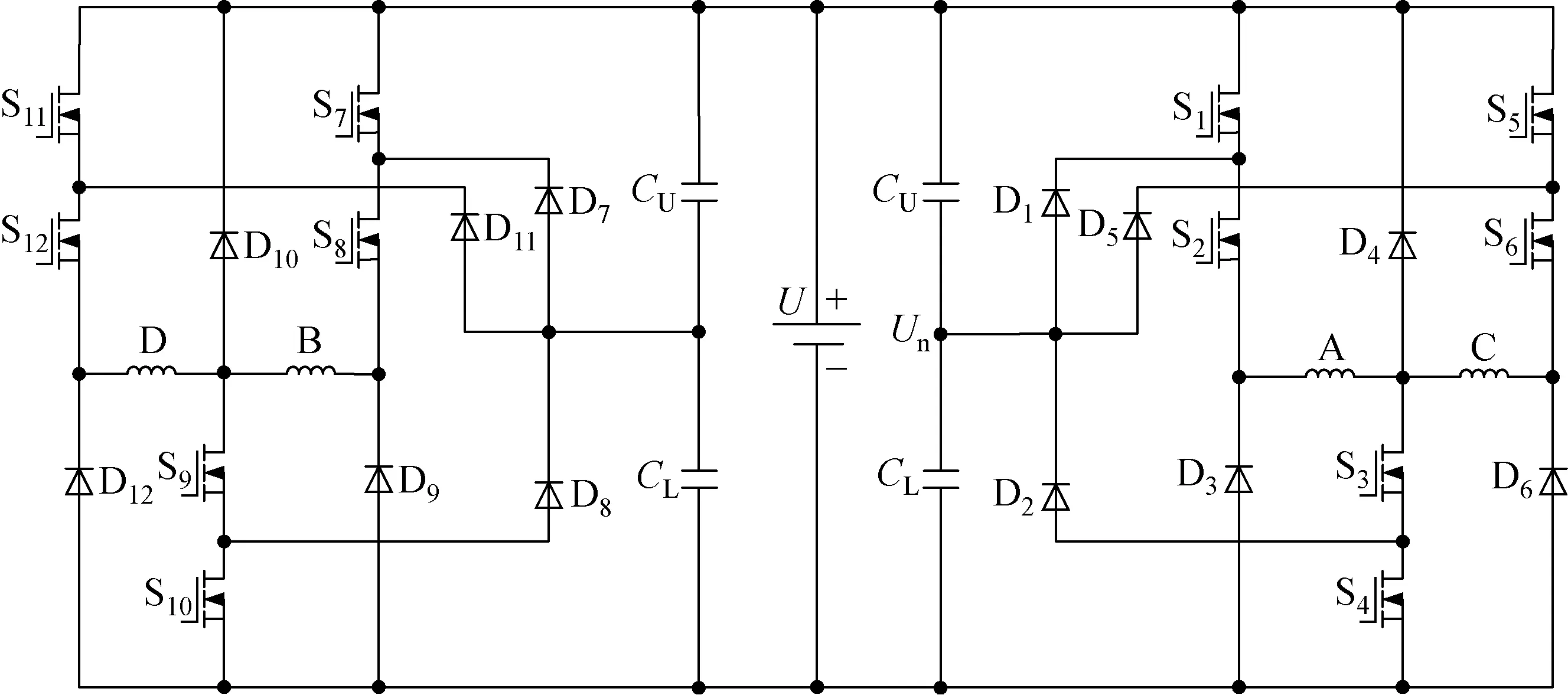
图5 5L-ADCC主电路Fig.5 Main circuit of 5L-ADCC topology
励磁电压状态如图6所示,当电动机运行在高速大负载下,旋转电动势较大,尤其在换相时电流建立时间短,因此需对绕组施加较大电压以利于及时建立电流、增加出力,如图6(a)所示,定义电压状态为Sk=+2 (k=A,B,C,D);当电动机运行在低速小负载下或转矩误差较小时,在换相期间励磁电流上升迅速,为避免电流过大造成转矩脉动,应采用较低的励磁电压,如图6(b)或6(c)所示,定义电压状态为Sk=+1.
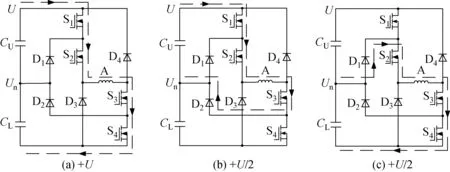
图6 励磁电压状态Fig.6 Voltage state of excitation
续流电压状态如图7所示,将电压状态定义为Sk=0.可以看出,3种续流回路都不会造成中点电位失衡,在实际控制过程可选择流过器件较少的回路,如图7(a)或7(b)所示.
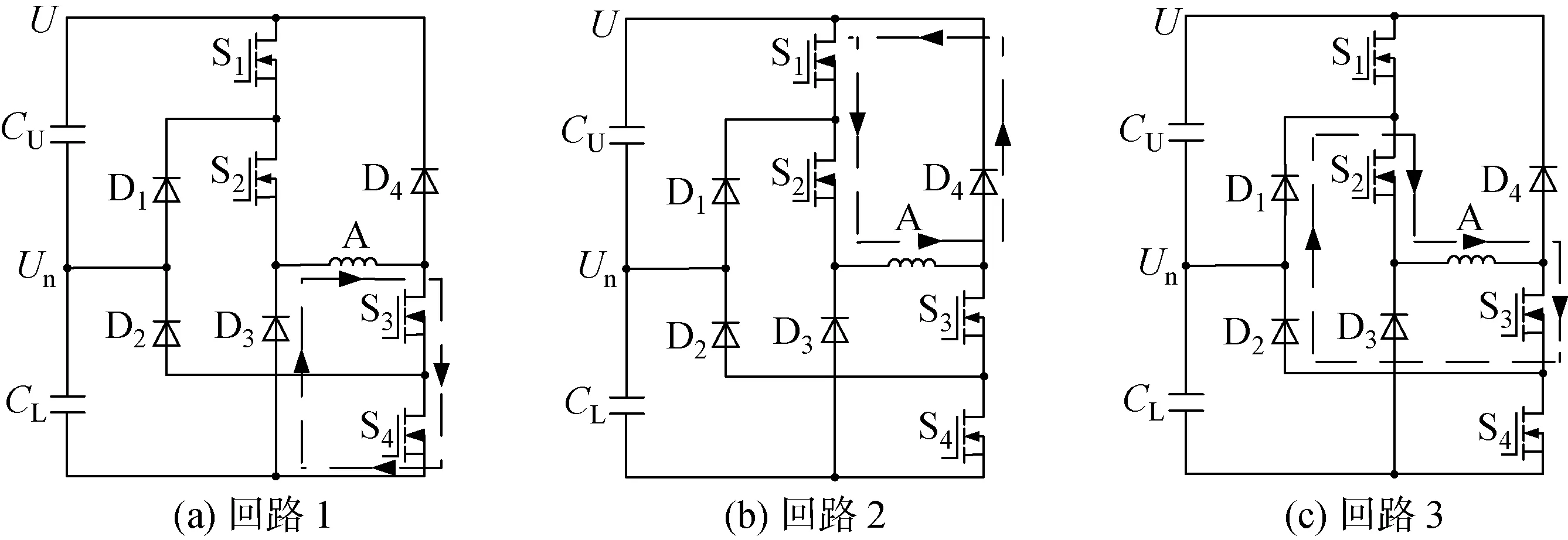
图7 续流电压状态Fig.7 Voltage state of continuous current
去磁电压状态如图8所示,当电动机运行在高速大负载下,相电流下降缓慢,对绕组施加较大去磁电压可以避免换相时当前相去磁电流下降缓慢造成的转矩下跌现象,如图8(c)所示,将电压状态定义为Sk=-2;当电动机运行在低速小负载下或转矩误差较小时,为避免电流下降过快造成的转矩出力不足,需对绕组施加较低的去磁电压,如图8(a)或8(b)所示,将电压状态定义为Sk=-1.
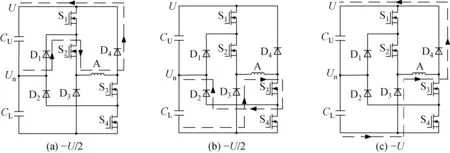
图8 去磁电压状态Fig.8 Voltage state of demagnetization
在开关磁阻电动机驱动系统中,功率变换器的成本通常可以用额定伏安值来评价[18].假设中点电位平衡,分别对比采用不对称半桥变换器、文献[17]所述功率电路、5L-ADCC时各器件的额定伏安值,如表1所示,其中空白表示不适用.可以看出,文献[17]所述功率电路的开关管及二极管虽是不对称半桥的两倍,但由于其所承受电压或额定电流(I)值只有不对称半桥的一半,所以该功率电路的功率器件成本并没有增加.所提5L-ADCC电路在文献[17]所述功率电路基础上进一步改进,令A、C (或B、D)两相共用同一桥臂,减少功率器件,总额定伏安值要低于上述两种功率电路,降低了成本.因此, 5L-ADCC电路在实现五电平驱动、保证各相独立性的同时降低了器件成本.
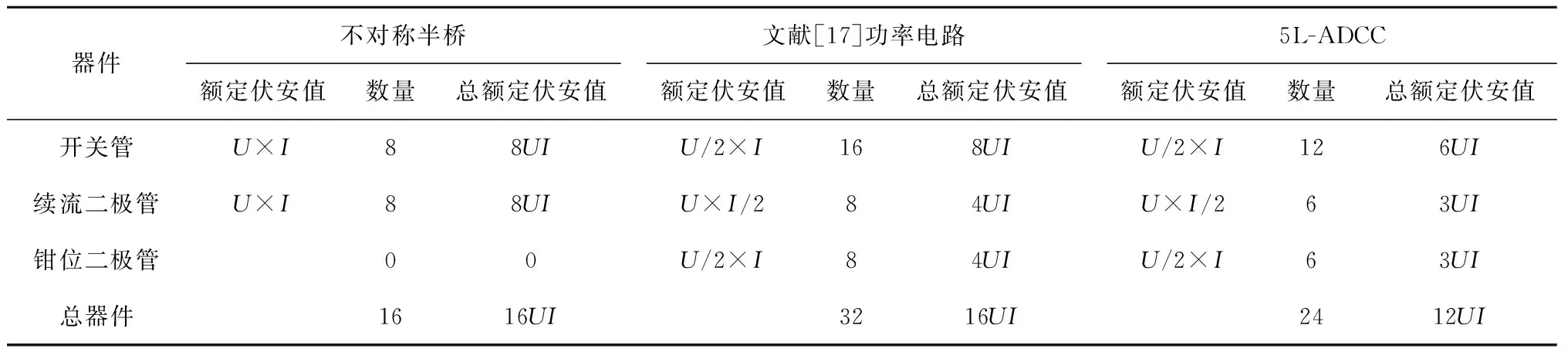
表1 额定伏安值对比Tab.1 Comparison of volt-ampere ratings
2.2 导通区间划分

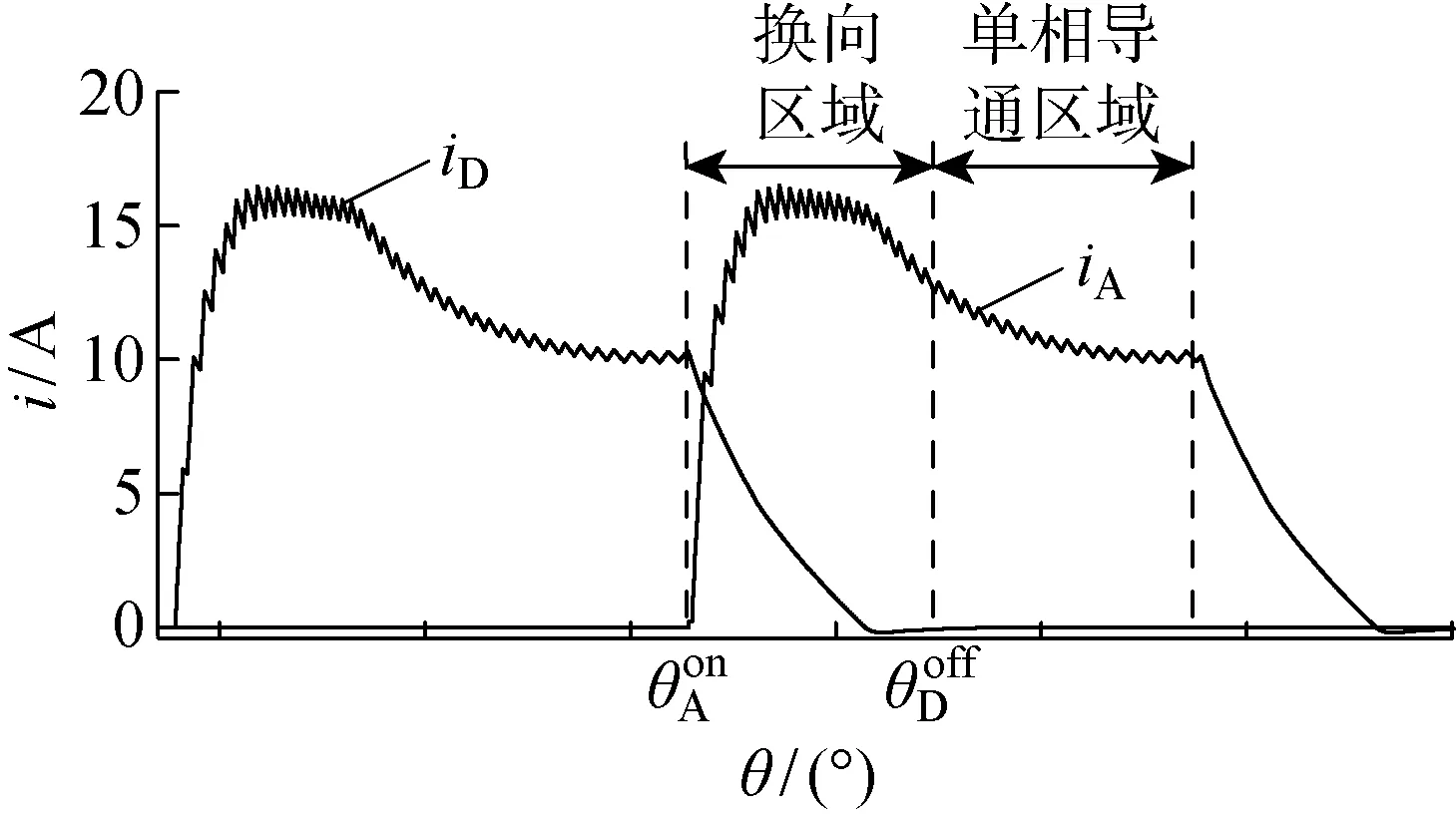
图9 传统DITC下的电流波形Fig.9 Current waveform in traditional DITC
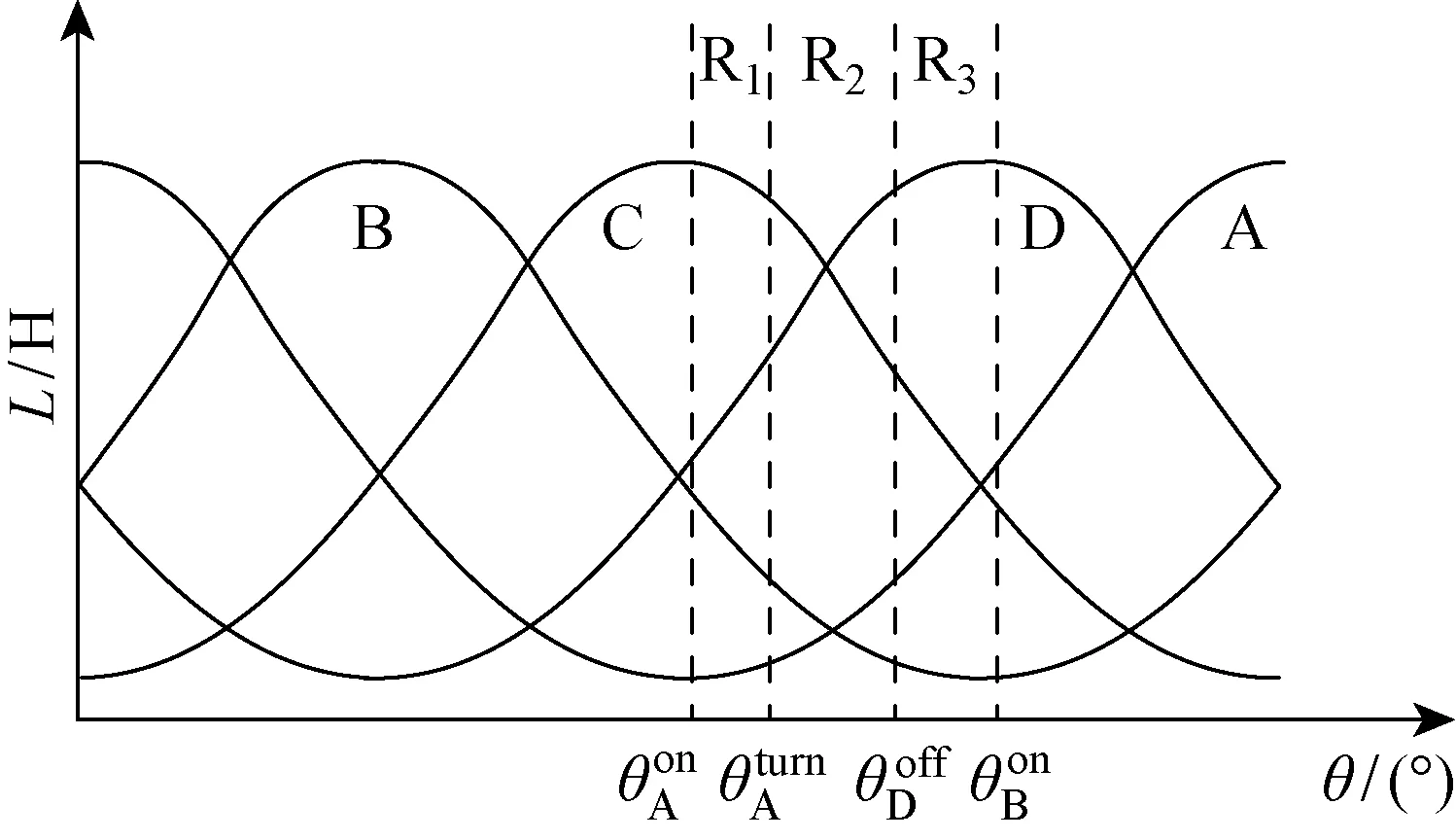
图10 相电感曲线与位置角关系Fig.10 Phase inductance curve versus position angle
2.3 DITC导通规则设计
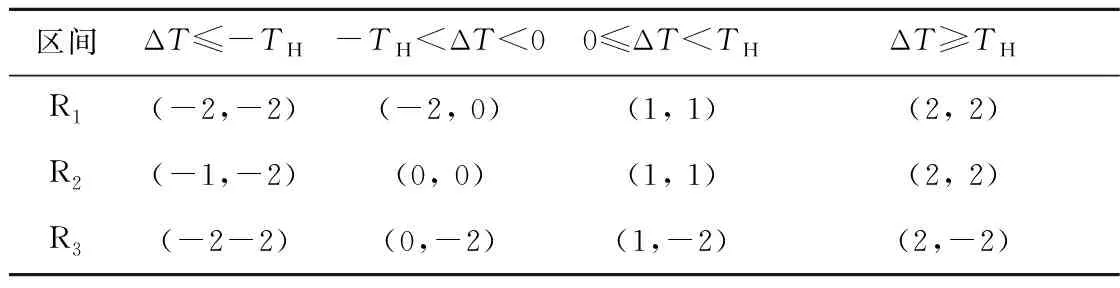
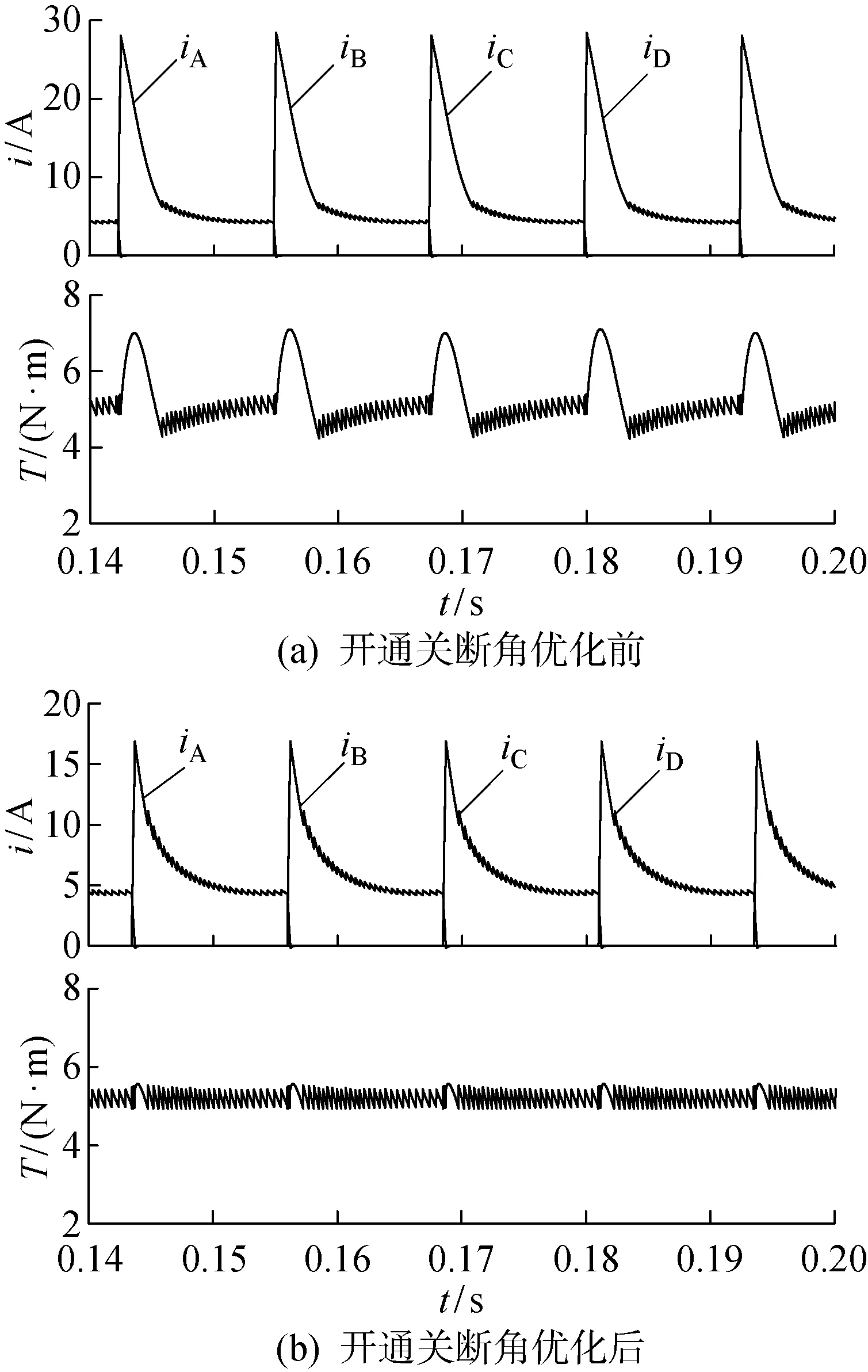
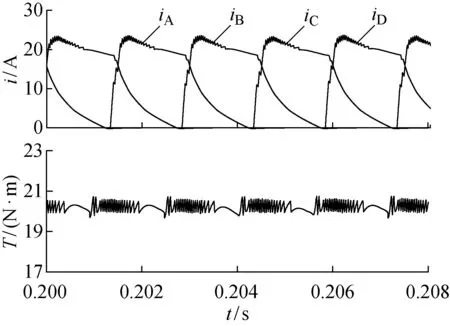
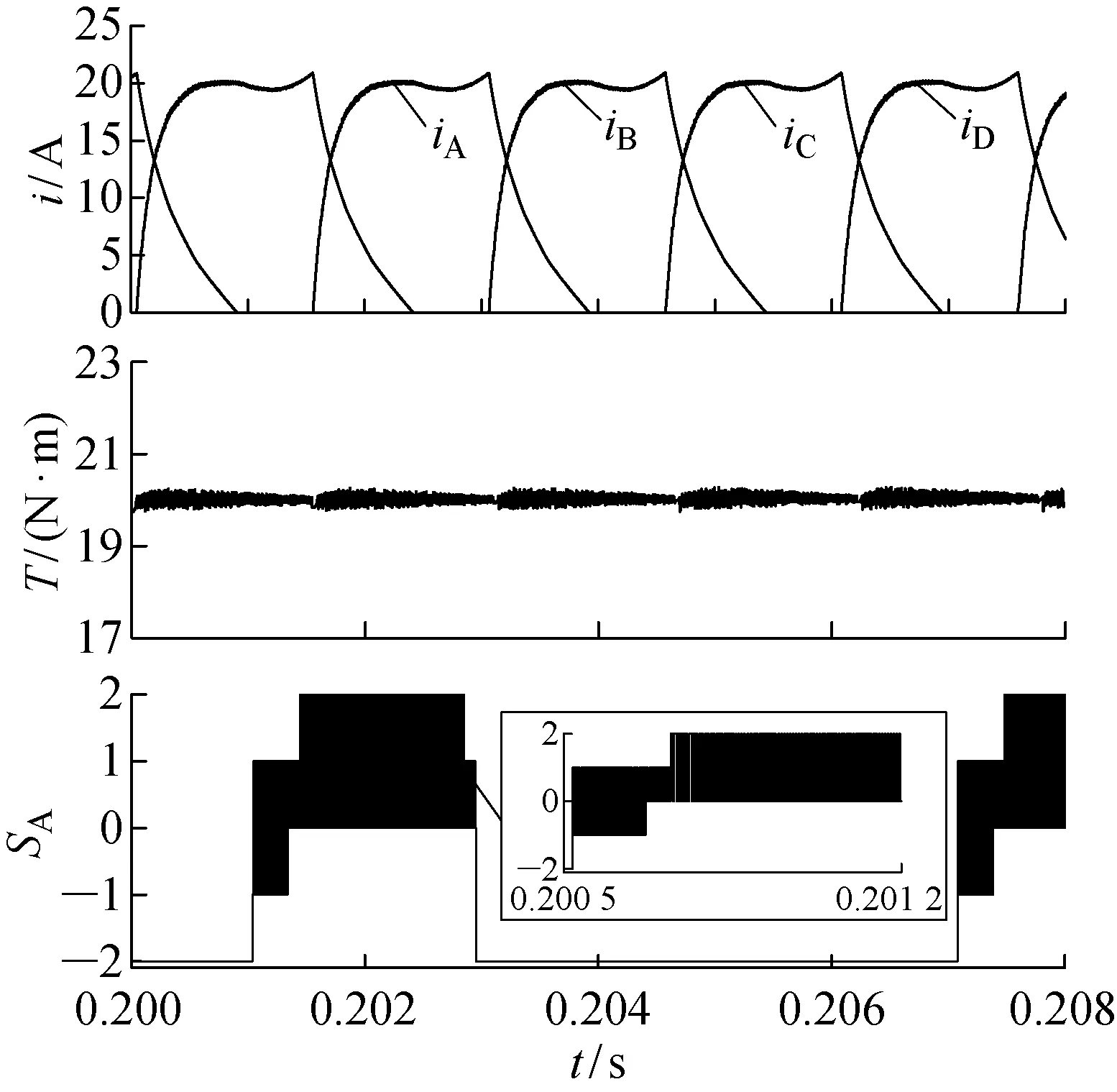
针对转速工况较大变化时对电流跟踪能力的影响,结合导通区间,设计低速与高速下的DITC导通规则,如表2~3所示.其中,括号内两个量分别表示A、D两相的电压状态,TH为转矩上限值.
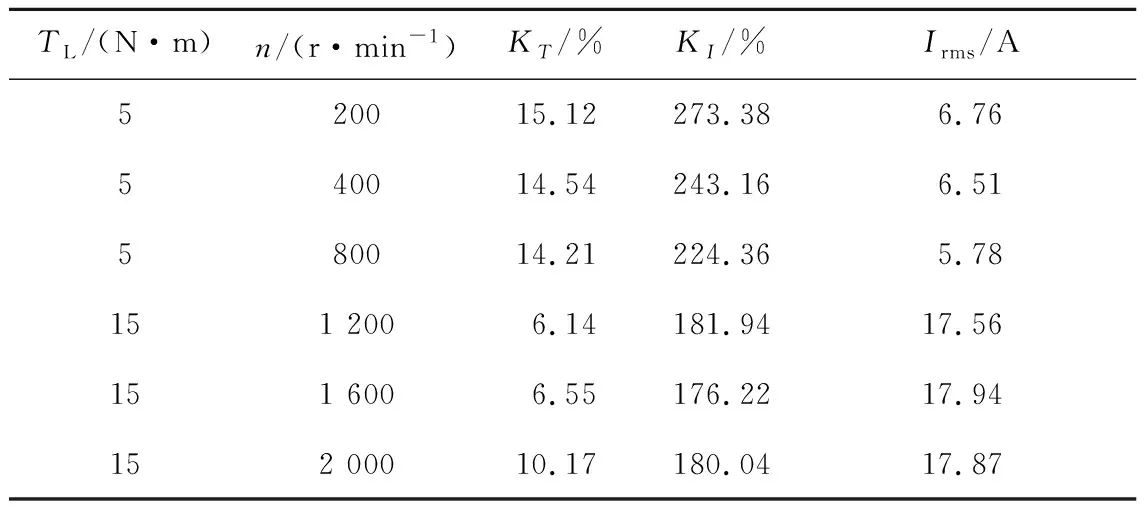
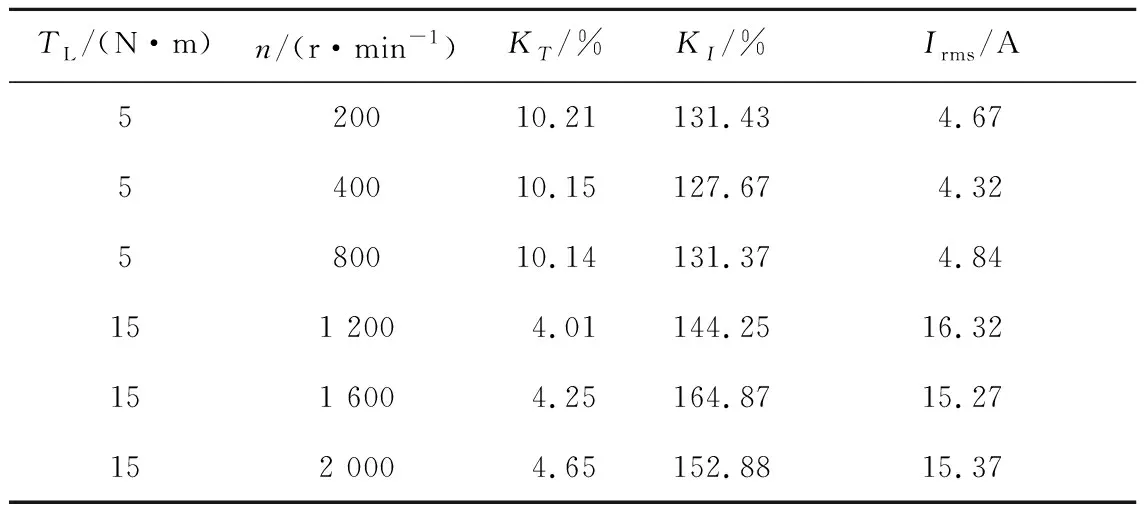
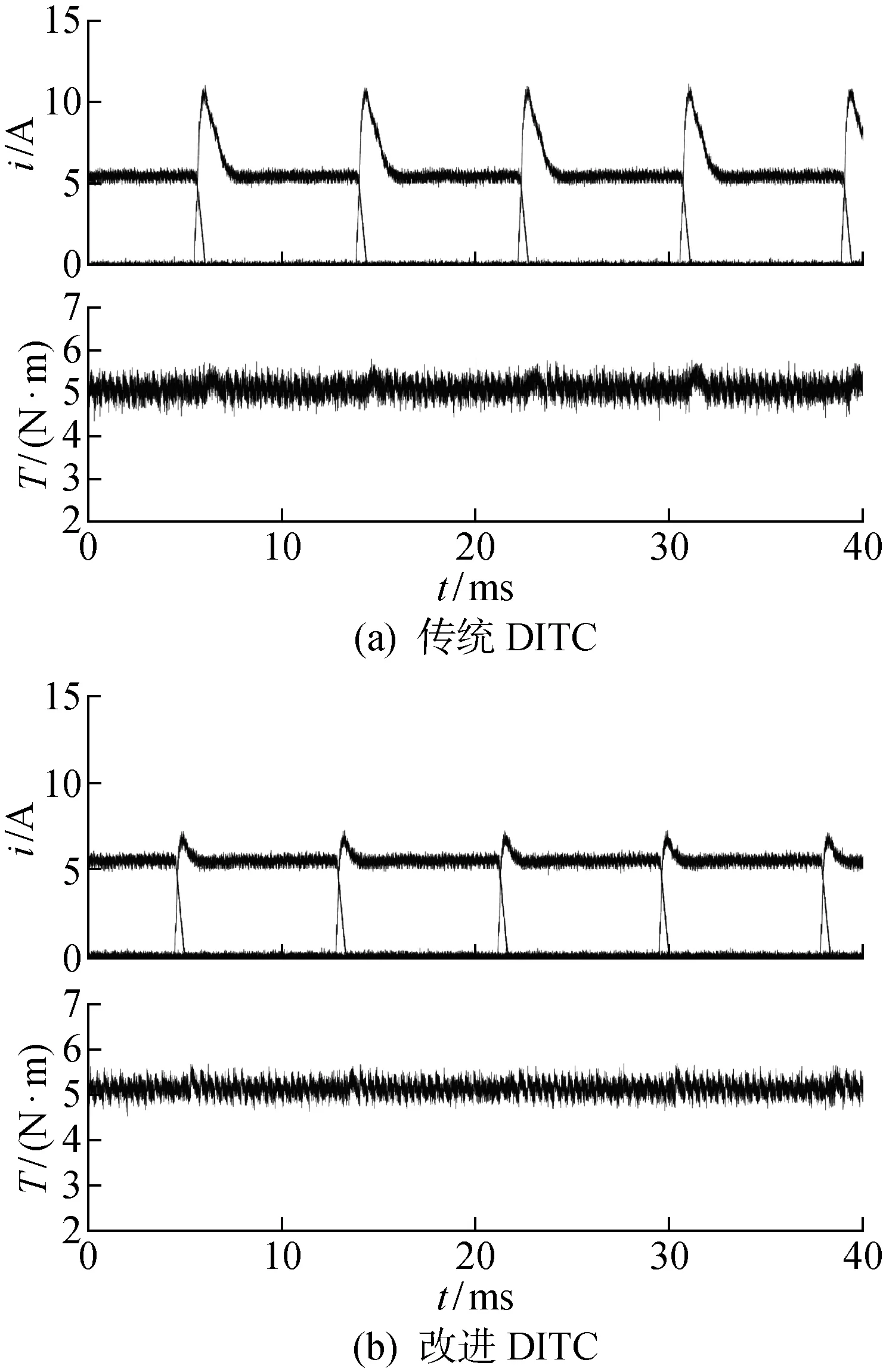
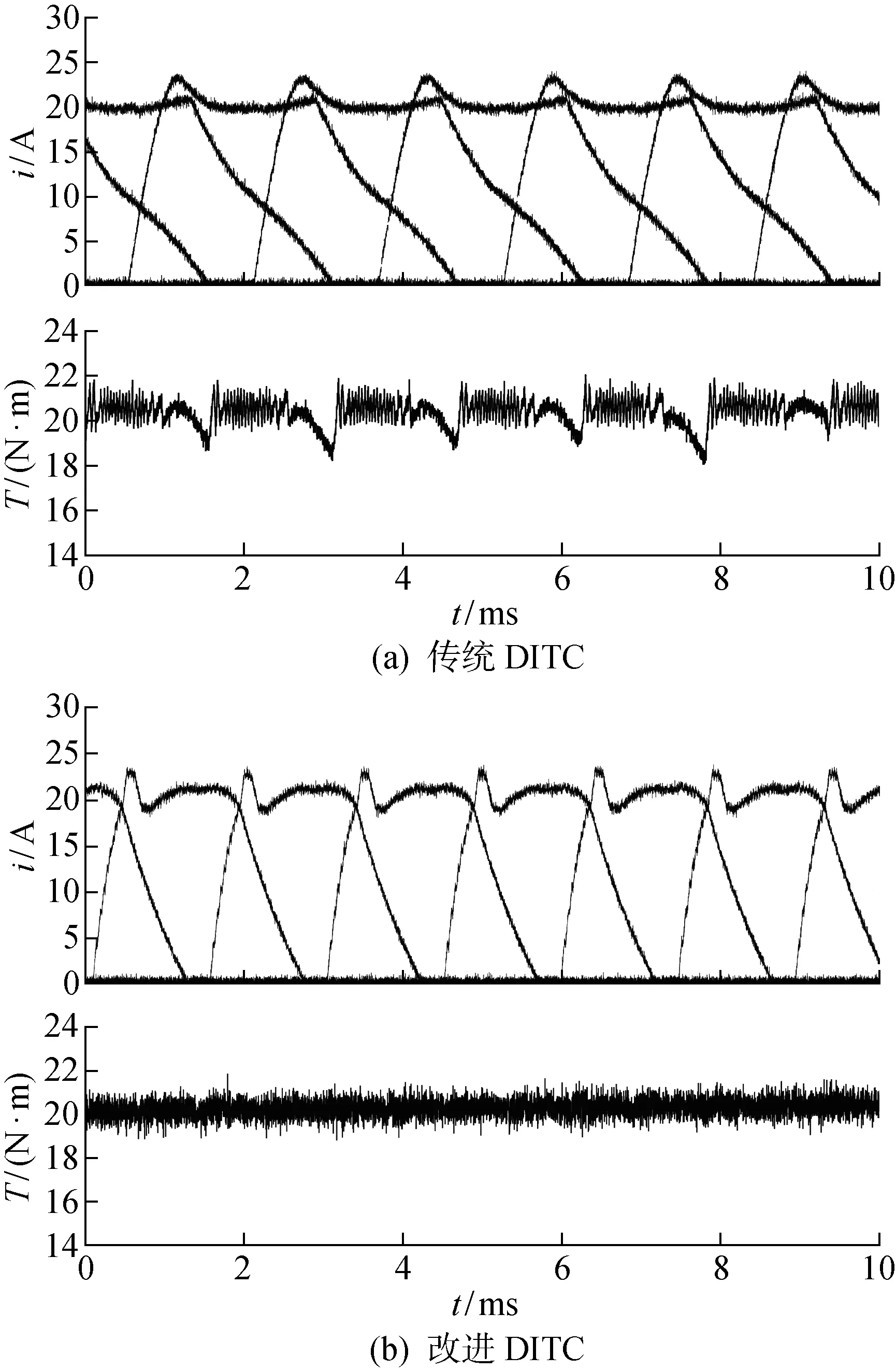
当电动机低速运行时,旋转电动势e较小,施加较低等级电压可确保绕组良好的电流跟踪能力,故采用三电平驱动控制.如表2所示,转子处于区间R1时,由式(7)可知,A相电流线性上升,峰值较大,避免A相过多导通而由电感变化率较高的D相承担转矩输出任务,可有效削弱电流脉动,提高运行效率.其中,当0≤ΔT 表2 低转速下各区域导通规则Tab.2 Conduction rules for regions at a low speed 当电动机高速大负载运行时,旋转电动势e变大,绕组电流上升和下降缓慢,若仍采用三电平驱动,当前绕组导通相电流无法及时跟踪所需值,容易流过负转矩区,产生较大的转矩脉动.5L-ADCC具备多种电压等级,全压输出时可实现绕组快速励磁和去磁,因此在高速下采用五电平驱动,如表3所示,在提升电流跟踪能力的同时提高了转矩控制的灵活性.同样地,为避免滞环控制中滞环限内电压矢量自由响应,在滞环限内对绕组施加较低的电压等级,不断调整转矩误差, 减小转矩脉动. 表3 高转速下各区域导通规则Tab.3 Conduction rules for regions at a high speed 为了验证所提控制方法的有效性,在仿真工具MATLAB/Simulink中分别构建传统DITC系统和5L-ADCC拓扑下改进DITC系统的仿真模型.系统采样频率设为100 kHz,电动机额定功率7.5 kW,额定转速1 500 r/min,瞬时转矩值通过有限元建立的转矩特性表插值获得.传统DITC系统中,初始开通角设为31°,关断角设为51°,并根据转速变化进行相应优化;改进DITC系统中,开通角为30°并保持不变,关断角为51°. 图11~12分别为电动机转速n为200 r/min、负载转矩TL为5 N·m下两种控制方案的仿真波形图.仿真结果表明,在低速下传统DITC受开通关断角影响较大,换相期间会有较大的电流脉动.这是由于低速下电流变化率高、电流跟踪及时,在换相期间,即将导通相的电流建立速度很快,并且开通角越小,励磁时间越长、电流峰值越大,转矩脉动相应增大.虽然优化开通和关断角可以减少相电流励磁时间,降低电流峰值,但传统DITC在换相时优先导通下一相;而下一相在换相前期输出转矩能力较弱,为达到给定转矩值,会产生较大的电流幅值.改进的DITC系统对导通区间重新划分,在换相前期继续以前一相为主导通相,换相后期才以下一相为主导通相,避免下一相相电流励磁时间过长,减少转矩脉动;并且低速下电流变化快,因此只对绕组施加三电平电压,在滞环限内施加较小的平均电压,使系统能够快速响应转矩的变化,避免转矩脉动过大的现象发生. 图11 TL=5 N·m (n=200 r/min)的传统DITC波形图Fig.11 Waveform of traditional DITC at 5 N·m (200 r/min) 图12 TL=5 N·m (n=200 r/min)的改进DITC波形图Fig.12 Waveform of improved DITC at 5 N·m (200 r/min) 图13~14分别为电动机转速n为1 500 r/min、负载转矩TL为20 N·m两种控制方案的仿真波形图.可以看到,传统DITC系统在换相时出现较大的转矩脉动,并且伴有转矩跌落的现象发生.由于在高速大负载下,旋转电动势变大,导致电流变化率变低,电流跟踪效果变差,绕组电流励磁和去磁比较缓慢,换相时前一相电流容易延伸至电感下降区产生负转矩,并且传统DITC下刚导通相输出转矩能力不足,导致转矩发生较大的脉动.改进的DITC系统在高速下对绕组施加五电平电压,提高电流跟踪能力,有效减少绕组的励磁和去磁时间,防止相电流进入负转矩区,改善转矩动态性能,减小转矩脉动. 图13 TL=20 N·m (n=1 500 r/min)的传统DITC波形图Fig.13 Waveform of traditional DITC at 20 N·m (1 500 r/min) 图14 TL=20 N·m (n=1 500 r/min)的改进DITC波形图Fig.14 Waveform of improved DITC at 20 N·m (1 500 r/min) 为比较传统DITC与5L-ADCC拓扑下的改进DITC在不同负载和转速下的运行性能,分别引入了转矩脉动系数KT、电流脉动系数KI和有效电流值Irms作为评价SRM运行的性能指标.其中,转矩脉动系数可表示为 (8) 式中:Tmax、Tmin、Tav分别为电动机在稳态下的转矩最大值、最小值、平均值.KT是反映SRM固有转矩脉动的重要指标,KT越小,电动机输出转矩越稳定,电动机运行越稳定. 电流脉动系数可表示为 (9) 式中:Imax、Imin、Iav分别为电动机在稳态下的电流最大值、最小值、平均值. 对比表4~5可知,改进的DITC方法不仅在低速小负载时有较好的转矩脉动抑制能力,在高速大负载下仍能够有效抑制转矩脉动,这是由于高速大负载时采用五电平驱动,在转矩误差偏大时对绕组施加大电压,加快绕组电流励磁与去磁,能及时调整转矩误差.结合高速下的DITC导通规则,电流跟踪性能良好,绕组励磁和去磁迅速,能避免产生负转矩,降低转矩脉动.对比表4~5的KI和Irms可知,所研究的DITC系统的电流脉动较传统DITC更小,尤其在低速小负载时电流脉动得到有效抑制,降低了电流的峰值和有效值. 表4 传统DITC在宽速域下的性能指标Tab.4 Performance of traditional DITC in a wide speed range 表5 改进DITC在宽速域下的性能指标Tab.5 Performance of improved DITC in a wide speed range 为验证所提方案的有效性,在8/6极、7.5 kW电动机平台上进行对比实验,平台包括电动机本体、控制器、变换器、电源模块、通信模块、检测电路等,如图15所示.电动机额定电压为280 V,额定转速为1 500 r/min.控制开关频率为10 kHz,转矩环采样频率设为20 kHz,采用光电编码器获取转子位置,采用磁粉制动器作为负载,采用转矩仪获取转矩.图16为电动机转速300 r/min、负载5 N·m时的电流和转矩波形图;图17为电动机转速1 700 r/min、负载20 N·m时的电流和转矩波形图. 图15 实验平台Fig.15 Experimental platform 从图16可看出,传统DITC在低速运行时电流脉动较大,转矩在换相时有较大幅值,改进DITC对导通区间重新划分,避免换相初期的电流尖峰,较好地抑制转矩脉动.随着转速升高,传统DITC电流变化变慢.从图17可看出,传统DITC的转矩出现下跌现象,转矩波动在4.1 N·m左右,改进DITC对绕组施加高电平电压,加速绕组励磁和去磁,避免负转矩的产生,转矩波动在2.7 N·m左右,转矩脉动降低34.1%,即得到抑制. 图16 n=300 r/min时不同控制方式的波形Fig.16 Waveforms of different control modes at n=300 r/min 图17 n=1 700 r/min时不同控制方式的波形Fig.17 Waveforms of different control modes at n=1 700 r/min 从实验结果和仿真结果可以看出,所提方案在宽速域范围下可有效抑制转矩脉动,改善转矩的动态特性. (1) 针对开关磁阻电动机在换相时因电流跟踪效果不佳造成转矩脉动大的缺陷,提出一种五电平拓扑的改进DITC控制方法,对每相导通区间重新划分,根据转速及负载工况较大变换时对电流变化率的影响,提出系统在低速与高速下的DITC导通规则. (2) 所采用的5L-ADCC电路可充分发挥五电平拓扑的优势,提高电动机控制的灵活性.相比于不对称半桥功率电路,5L-ADCC电路虽功率器件有所增加,但总额定伏安值有所降低,变换器的成本减少. (3) 仿真和实验证明,所提控制策略在较宽速度范围能够有效抑制换相区的转矩和电流脉动,转矩电流比得到提高.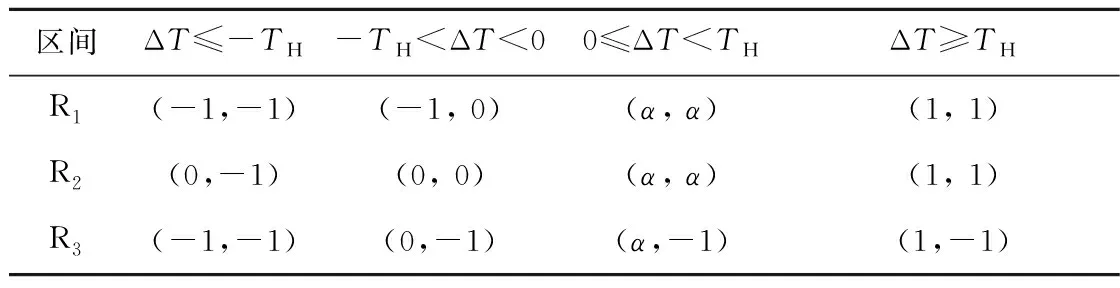
3 仿真分析

4 实验分析

5 结论
猜你喜欢
电工技术学报(2022年20期)2022-10-29
大电机技术(2022年3期)2022-08-06
重庆理工大学学报(自然科学)(2022年5期)2022-06-18
微电机(2022年1期)2022-03-21
内蒙古电力技术(2021年5期)2021-11-21
莆田学院学报(2021年5期)2021-11-13
河北电力技术(2021年2期)2021-07-29
河北电力技术(2021年2期)2021-07-29
速读·下旬(2019年3期)2019-04-11
电子制作(2018年1期)2018-04-04