
“开源硬件+3D打印”机器人的设计与研究
2022-12-29 00:00:00王乐
中小学信息技术教育 2022年9期
【摘 要】随着全国中小学电脑制作活动机器人竞赛方式的改革,机器人竞赛已从过去的限定品牌、型号的专项赛转变为旨在考察学生现场动手解决问题能力和实际编程水平的开放式竞赛。本文主要探讨笔者在Labview编程环境下结合开源硬件和3D打印技术在设计B类:轮式或履带式行走机器人的过程中遇到的困难及解决方法,以期为大家提供借鉴和启发。
【关键词】开源硬件;3D打印;机器人设计
【中图分类号】G434 【文献标识码】B
【论文编号】1671-7384(2022)09-076-02
全国中小学电脑制作活动机器人竞赛自2020年改革以来,将众多专项赛组合成三个通用机器人竞赛项目,即A、B、C三类,以满足所有机器人均可参赛的要求。其中B类:轮式或履带式行走机器人的规则最为开放,难度最高。以南京中小学机器人竞赛活动中B类:轮式或履带式行走机器人为例,竞赛规则分为巡线和搬运两个部分,要求学生在有限的时间内完成现场搭建、现场编程、现场抽签、现场比赛。在这样的规则下,一改过去“按按钮”式的比赛场景,能够真实地考察学生的机器人编程能力和动手能力。
新规则对各参赛学校影响较大,对指导教师和参赛学生提出了更高的要求,这既是一次挑战也是一次创新的机会。如何在规则下既能设计出同时满足巡线和搬运的机器人,又能在有限的时间内减少学生搭建时间,将更多的时间留给机器人编程,成了指导教师急需解决的问题。笔者从学校现有器材的具体情况出发,根据学生的编程习惯考量,做了以下实践研究。
现状分析
1.教育机器人设计现状
教育机器人以EV3套装为主,国内众多学校都将其作为竞赛机器人,根据不同的比赛任务要求设计相应的车体和机械臂。采用EV3为核心设计的机器人,机器人的整体度较高,其独有的图形化编程平台Labview对于学习者来说较为友好,简单易学。但随着比赛任务难度的增加,采用EV3为核心设计的机器人在组装或拼砌的难易度上也大大增加。甚至由于EV3控制器、传感器的数量有限,已经无法应对某些任务。
2.开源机器人设计现状
目前国内用于中小学教育的开源机器人多以Arduino开发板为核心,并配有驱动模块、各类传感器、电机等。这些采用Arduino开发板为核心的开源机器人可以使用Arduino IDE软件或第三方图形化软件进行程序编写。其中采用Arduino IDE软件编写程序时,对小学生要求较高,需要学生掌握高级编程语言。但这些开源机器人在结构设计上难度较低,搭建机器人时仅需要通过螺丝连接结构件,甚至可以通过3D打印技术、激光雕刻技术DIY某些一体结构件。
3.学校基本现状分析
我校机器人设备单一,以EV3套装为主,在以往的竞赛中也仅参加专项赛,如FLL、WRO等。在机器人社团活动中,也是以EV3为载体,因此学生对于积木搭建以及Labview编程平台较为熟悉。如果贸然更换开源设备,学生不管是搭建还是编程都较为陌生,难以适应,这就大大增加了机器人在设计上的局限性。
相对于开源器材,EV3套装的主控、电机、传感器尺寸大、速度慢、完成任务的策略相对单一。用EV3套装应对B类竞赛任务,要想一次性完成所有任务,结构设计上就要更加复杂。
4.策略选择
笔者思考能否依旧基于Labview编程平台,即仍使用EV3套装的主控、电机和传感器,增加兼容扩展板控制开源设备,在丰富完成任务策略的同时解决学生对编程平台陌生的问题。同时,通过3D打印技术,设计制作通用的结构件,缩短学生的搭建时间,降低搭建难度。
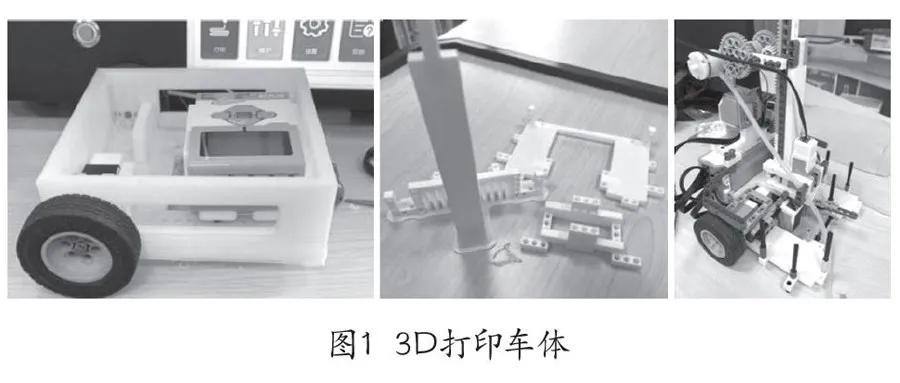
基于以上分析和思考,笔者最终确认使用EV3主控设备,寻找兼容的开源设备控制气泵和泄气阀,结合3D打印技术设计制作车体(图1),以吸取的方式完成竞赛任务。
设计策略
1.开源扩展
EV3官方发行版本的传感器相当有限,而市场相当火爆的创客传感器相对较多,比如Arduino、树莓派等很多开源传感器。随着EV3开源软硬件,市场上兼容EV3的开源扩展板也相对多了起来。这些扩展主要分为四大类,分别是模拟类、数字类、通信类和其他特殊类,同时这类扩展都配套了开发者自制的编程模块,使用方法也非常简单,仅需导入即可。经过不断尝试,最终笔者找到了由姚伟民老师开发的四路直流电机扩展。四路直流电机扩展可以驱动四路直流马达进行正转、反转和停止。在与EV3主控连接时,仅需要通过EV3的数据线连接EV3主控的传感器口即可使用。编程时,先通过EV3-Lab软件左上角工具——模块导入,导入编写好的模块,即可在动作模块下看到四路电机模块,再选择对应的模式使用。
2.吸取装置
吸取装置由气泵、常闭泄气阀、吸盘、软管组成。其工作原理相对简单,即通电后气泵工作,抽出空气,形成真空,吸取砖块。断电后停止抽气,此时常闭泄气阀开始工作,泄出气体,放下砖块。四路直流电机扩展可以直接驱动电压在5V以下的直流电机。任务道具使用EVA材质,质量较轻,整体重量在4克左右,小型气泵即可胜任吸取工作。
3.3D建模零件
3D建模是本次设计中最难的环节。与开源硬件的建模不同,开源硬件可以用螺丝直接固定,因此在建模时不需要过于考虑孔径的匹配,仅需要在整体尺寸上考量即可。而为了能够使零件相互兼容,在建模时严格按照零件的尺寸进行匹配。为了提高精度和造型美观等因素做了圆角设计,这就为建模带来了挑战。即使使用游标卡尺测量出相对尺寸,在打印出成品后也有一定误差。这些误差产生的原因主要来自两个方面,一方面是测量时产生的误差,另一方面则是3D打印机在打印过程中的误差。需要不断尝试,3D建模零件才能找到合适的尺寸。
总结与反思
在笔者建模的过程中并不是一帆风顺的,也遇到过困难。如在车体的整体建模上,由于长期使用积木搭建的惯性思维,在一开始车体设计时设计得非常方正,其实仅需要设计我们想要的结构,其余部分忽略即可,这样不仅可以减轻重量,还可以降低搭建难度。在设计初期,由于需要不断修改车体结构,我们应该将车体进行模块化设计,即将车体分为几个部分,分开打印再拼装。相对于非模块化设计,这样就可以避免我们修改部分设计后需要重新打印整个车体,从而节约研发时间和研发成本。同时,也能解决3D打印机尺寸不足的问题。待定稿后,再将所有模块整合在一起整体打印,以降低搭建难度。
3D打印技术不仅可以和乐高结合,还可以和其他开源件结合,并且在对尺寸的要求上相对简单。这不仅是A、B、C类机器人的设计趋势,也是3D打印技术的价值所在:解决生活中的实际问题,制备复杂的形状和结构,缩短制造业和制造产品的周期。
参考文献
李立新. 中小学机器人竞赛活动的设计与实践研究[J].实验教学仪器,2020(Z1).
