
汽车电动助力转向系统双模糊控制策略研究
2022-12-27 05:24王陈宁陈世军查长礼
安庆师范大学学报(自然科学版) 2022年4期
王陈宁,陈世军,查长礼,郭 玉
(安庆师范大学,电子工程与智能制造学院,安徽 安庆 246133)
电动助力转向(EPS)系统是一种新型的汽车助力转向系统,加入该系统的车辆能提高操纵稳定性和安全性,现已成为轿车动力转向的主流技术。与传统的液压助力转向装置相比,EPS系统不需要液压泵、软管、液压油等,因此整个助力系统更轻。除此之外,EPS还具有安全、节能、环保等优点。
对于EPS系统助力特性的研究,杨凌霄等[1]提出了基于Matlab的函数计算方法和模糊控制法;汪超[2]分析了影响EPS系统助力特性的因素,并在仿真软件中进行了仿真验证。在EPS系统控制方面,牟春燕等[3]发现利用比例控制电机电流存在振动,并提出了利用微分补偿的改进措施,试验结果表明该控制系统稳定,操纵性、灵敏性也较好;薛明琛等[4]创新了EPS系统电流跟踪方法,其引入了滚动时域算法,且同时考虑了系统性能及鲁棒性,在保证驾驶员获得有效路感的同时,提高了系统转向的操纵稳定性;商显赫等[5]以轻型货车EPS系统为研究对象,设计了EPS系统模糊自适应PID控制器,在Carsim和Simulink中进行了联合仿真,与传统PID相比,该控制器EPS响应速度更快,超调量更小。现有研究已将模糊控制理论运用到EPS系统中,但是在一个EPS系统中两次利用模糊控制理论的研究还没有。本文设计两个模糊控制器,一个模糊控制器用于产生助力电机目标电流,另外一个模糊PID控制器用于实现对目标电流的跟踪。
1 EPS助力特性
助力特性指的是助力力矩与车辆车速和转向盘转矩三者之间的变化规律[6]。EPS系统助力特性需满足以下条件:(1)原地转向时,助力力矩随着方向盘转矩增大而增大,但有最大值;(2)为确保低速转向灵活性,在低速转向时助力力矩变化规律与原地转向相似,助力力矩的大小较高速转向时小;(3)为确保高速转向的稳定性,高速转向时的助力力矩较小[7];(4)转向时,若转向盘转矩过小,不提供助力转矩;(5)为防止过渡助力,无论低速还是高速转向,助力力矩都有最大值。
2 EPS动力学模型
EPS系统简化图如图1所示,Td为驾驶员施加于转向盘上的转矩,θk为转向盘转角,θm为电动机转轴转角,Tm为电机电磁转矩,其它参数的物理意义、单位及取值如表1所示。

图1 电动助力转向系统简化图

表1 EPS系统参数
转向盘与转向轴上端部分的动力学微分方程为

转向轴下端部分的动力学微分方程为

其中,Ta和Tr分别为电动机施加于转向轴上的助力转矩和等效到转向轴下端的转向阻力矩,θc为转向轴转角。在转向角很小的情况下,转向阻力矩与转向角关系可表示为

其中,kc为比例系数。
依据电路理论知识,电机两端电压U与电机等效电感L、电枢电阻R、电机电流I以及反电动势常数Kb之间满足

电机电磁转矩Tm为

电机提供的助力转矩Ta还可表示为

转向轴转角θc与电机转角θm满足

其中,Gm为助力减速比。
联立式(5)、(6)和式(7),可得

3 双模糊控制
EPS双模糊控制总体系统如图2所示,设有两个模糊控制器,一个用于实现目标电流的产生,另外一个用于实现目标电流的追踪控制。目标电流模糊控制器输入为车辆速度V和转向盘转矩Td,控制器的输出Id与实测的电机电流I形成电流误差e,该误差信号作为第二个模糊PID控制器的输入,模糊PID控制器输出的直流电压U用来驱动助力电机,而助力电机通电产生的转矩即为助力力矩Ta。

图2 EPS双模糊控制系统总体框图
3.1 目标电流模糊控制器设计
EPS系统中助力电流的影响因素有很多,且与这些影响因素之间的关系为非线性,在众多影响因素中,通常只需考虑车辆行驶速度与转向力矩对助力电流的影响就能满足控制要求。目标电流控制器设计主要有以下三种方法:一是数学建模法[8],即建立整车的详细模型,该方法虽然推理严谨,但是在实际操作中要获取模型参数存在诸多困难,造成建模不准确;二是查表法,该方法需要通过大量实验,测得在不同车速和方向盘转矩时电机所对应的最佳助力电流,此种办法虽不需要知道整车系统模型,操作相对简单,但是不同车型需要做的工况实验不同,实验数据量庞大;三是采用模糊控制来实现助力电流控制器设计[9-11],该算法简便快捷、数据处理量少。本文采用了模糊控制算法,按照该算法的设计流程,其主要步骤如下。
(1)论域确定及模糊化
目标电流模糊控制器的输入有转向盘转矩Td和车辆行驶速度V,电机助力电流Id作为目标电流模糊控制器输出。输入量Td和V的基本论域分别为[1,12.5]N·m和[0,135]km/h,输出量Id的基本论域为[0,30]A。输入量Td、V和输出量Id各有7个模糊子集,分别为NB(负大)、NM(负中)、NS(负小)、ZE(零)、PS(正小)、PM(正中)、PB(正大)。
(2)隶属函数确定
借助Matlab软件中的模糊控制工具箱可以方便模糊控制器的设计,进入工具箱中的隶属函数编辑器可选择隶属函数的类型,包括三角形、梯形、高斯型等,文中选择的是梯形隶属函数,输入输出变量隶属函数如图3所示。

图3 输入输出变量隶属函数
(3)模糊规则建立
根据EPS助力特性,建立对应的模糊规则,如低速转向时,转向盘力矩小且助力也很小,可转换为以下的模糊规则:

类似地,可以转换的模糊规则还有48条,利用模糊控制工具箱可完成的模糊规则推理如表2所示。

表2 模糊规则推理表
(4)去模糊化
选择重心法进行输出变量去模糊化,经去模糊化后就能得到目标电流Id的精确值。
3.2 EPS系统模糊PID控制器设计
PID控制在EPS系统中有着广泛应用,传统PID控制器中的参数kp、ki和kd是固定不变的,不能满足EPS的控制要求。为此,引入了模糊PID控制器,根据输入变量的实时变化来调整控制器控制参数,能极大提高系统的动态响应速度和跟踪能力。
(1)论域确定及模糊化。模糊PID控制器有两个输入,目标电流与实际电流的电流误差e和电流误差变化率ec,输出有3个变量Δkp、Δki和Δkd。输入变量e和ec的基本论域分别为[-12,12],[-5,5];输出变量Δkp、Δki和Δkd的论域分别为[-4,4]、[-1,1]和[-0.05,0.05]。所有输入输出变量采用3.1中相同的7个模糊子集。
(2)隶属函数确定。同3.1,输入输出变量选择的是梯形隶属函数。
(3)模糊规则建立。根据PID参数调整原理,可获得Δkp、Δki和Δkd模糊规则推理表,如表3、表4和表5所示。

表3 Δkp模糊规则推理表

表4 Δki模糊规则推理表

表5 Δkd模糊规则推理表
(4)去模糊化
根据模糊规则进行模糊推理后,再进行去模糊化可得到PID控制器参数调整量Δkp、Δki和Δkd,因此,PID控制器的参数kp、ki和kd可分别表示为:kp=kp0+Δkp,ki=ki0+Δki,kd=kd0+Δkd,其中,kp0、ki0和kd0为设定的初始值。
4 仿真验证与台架实验分析
4.1 仿真验证
(1)EPS助力特性验证
为了验证利用模糊算法设计EPS系统助力特性的正确性,即满足汽车低速行驶时的转向轻便性以及高速行驶时的操纵稳定性,在Matlab/Simulink中对所设计的助力电流控制器进行了模型搭建。通过固定车辆行驶速度V,研究了电机目标电流Id与方向盘转矩Td之间的关系。如图4所示,当低速V=20 km/h或高速V=100 km/h时,在转向盘力矩较小(即Td≤1 N·m)时,助力电机电流Id都为零,符合转向盘所受转矩过小,助力电机不提供助力电流的助力特性;在转向盘力矩Td>7.04 N·m时,无论在低速V=20 km/h还是高速V=100 km/h时,助力电流大小都恒定不变,符合汽车行驶转向时助力矩增加到限定值保持不变的助力特性;对于相同的转向盘力矩助力下,低速状态下的助力相比于高速下的助力明显要大,这样能实现低速轻便性的要求,而高速时设计助力小,是为了防止过大的助力影响了车辆的稳定性;无论低速还是高速,助力电流的值都小于助力电流最大值30 A。分析发现,采用模糊控制算法获得的电机助力特性与要求的助力特性是一致的。
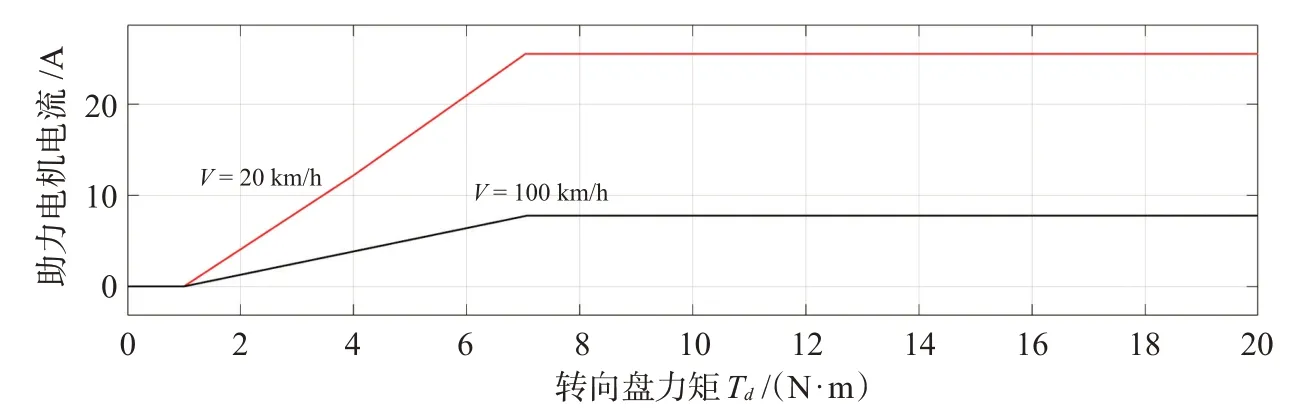
图4 不同速度时助力电流与转向盘力矩关系
(2)目标电流跟踪验证
为了验证所设计的模糊PID控制器性能[12],在Matlab/Simulink中建立了EPS系统仿真模型,如图5所示,系统主要由三部分组成:转向系统、电机子系统和控制系统。其中,转向系统主要实现EPS的动力学建模,电机系统实现电机建模,控制系统包括所设计的目标电流控制器和模糊PID控制器。经过反复试验,确定模糊PID控制器的参数kp0=4,ki0=6,kd0=0.1,以下针对转向输入为阶跃信号和正弦信号两种典型工况进行验证。
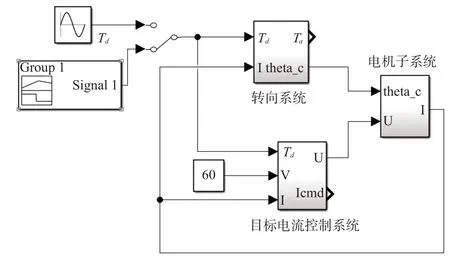
图5 EPS系统控制模型

图6 模糊PID控制程序代码
当转向盘输入为阶跃信号,车速分别为V=15km/h和V=90 km/h,时间t=0.5s时,转向盘被分别施加转矩为6 N·m,由目标电流模糊控制器产生的电机目标电流和实测电流分别如图7和图8所示。从图7可知,控制器在t=0.5s时受到转矩后,系统立即响应并产生22.5 A的目标电流,随后电机实际电流迅速增大,在t=1.5s时电机电流稳定于22.5 A。由图8也可知,当转向盘给定阶跃输入时,控制器也很快响应,最终电流稳定于目标值,将图7与图8相比,图8的调整时间更长。
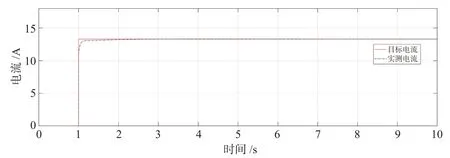
图7 车速为15 km/h时阶跃响应

图8 车速为90 km/h时阶跃响应
当转向盘输入为正弦信号时,为了验证系统对目标电流的跟踪效果,给转向盘施加幅值为10 N·m,角频率为1 rad/s的正弦输入,车速设置为30 km/h,电机电流追踪目标电流的情况如图9所示,可以看出,实际电流与目标电流几乎一致,跟踪效果良好。值得注意的是,在正弦转向盘输入情况下,本应为正弦波形的目标电流由于最大电流限制,正半周顶部和负半周底部都被削平且最大电流都被限制在27 A左右;另外,在实际电流和目标电流的零点处存在“交越失真”,该现象是由于EPS助力特性中要求转向盘所受转矩过小时,助力电机不提供助力,即此时助力电机中电流为零。同样地,在转向盘上施加正弦力矩时,助力力矩也会出现波峰、波谷被削平,在零值附近出现“交越失真”的情况,如图10所示。
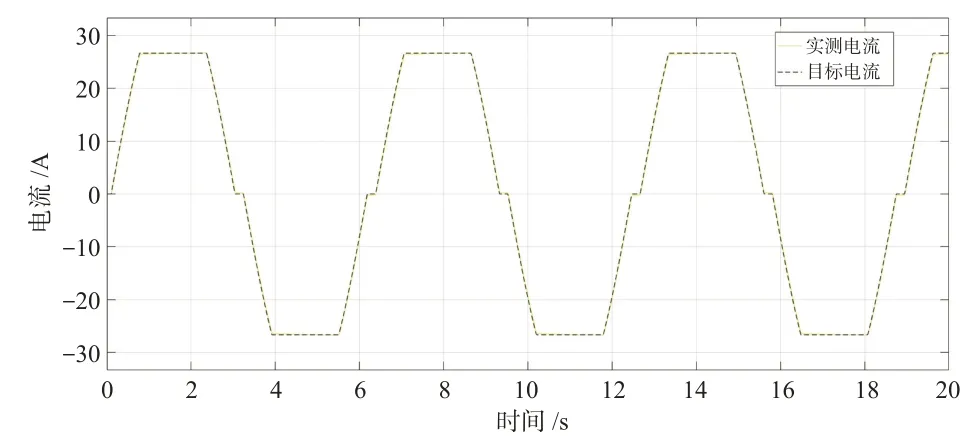
图9 正弦转向盘输入电流跟踪
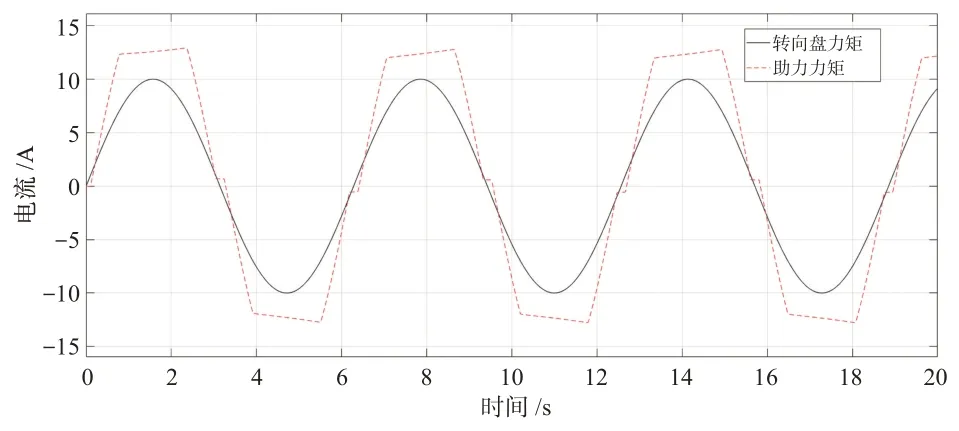
图10 正弦方向盘转矩和助力转矩
4.2 台架系统实验
EPS系统台架主要由路况模拟系统、电动助力转向系统、电动助力转向系统控制器、数据采集系统,以及上位机构成,如图11所示。路况模拟系统主要利用电机实现不同形式的转向盘输入,电动助力转向系统控制器利用TI公司的DSP芯片TMS320F28335开发,控制器与上位机通过串行口进行通信,数据采集系统使用NI公司的USB数据采集卡。利用台架系统进行了EPS助力特性实验和目标电流跟踪实验,结果如图12所示,可以看出,不同速度时助力电机实际电流与转向盘力矩关系与图4仿真结果相似,只是在实际电流测量时存在干扰噪声。

图11 台架系统结构图

图12 台架实验中助力电流与转向盘力矩关系
5 总结
本文对EPS的助力特性和控制器进行了研究,设计了用于产生目标电流和追踪目标电流的双模糊控制器。随后基于Matlab/Simulink仿真平台,对所设计的模糊控制器进行了仿真验证,结果表明,双模糊控制器不仅能按照设定的助力特性产生目标电流,而且能很好地跟踪目标电流。当然,设计的控制器还需从以下两个方面进一步完善:设计过程中要考虑回正控制和阻尼控制;所设计的控制器还要进行实车试验。
猜你喜欢
英语世界(2022年9期)2022-10-18
金桥(2020年9期)2020-10-27
中学生数理化(高中版.高考理化)(2020年3期)2020-05-30
商周刊(2017年17期)2017-09-08
山东青年(2016年12期)2017-03-02
光学精密工程(2016年6期)2016-11-07
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
航天制造技术(2016年6期)2016-05-09
通信电源技术(2016年5期)2016-03-22
