
MRB-PAM康复柔性关节设计与分析
2022-12-26 13:37李安平LIAnping
价值工程 2022年35期
李安平LI An-ping
(重庆交通大学机电与车辆工程学院,重庆 400000)
0 引言
随着时代的进步和科学技术的不断进步,人们的身体健康问题越来越受到重视,尤其是在人体瘫痪的辅助治疗上。在后期自主康复的过程中,为了降低医疗患者家庭的生活费用,进而减轻治疗带来的心理压力,减少大量公共医疗资源的消耗,辅助人体的康复机器人应运而生。康复机器人是工业机器人和医用机器人的结合[1]。因此,目前康复机器人的驱动手段主要以电机等,控制机器人带动人体做运动。但当机器人应用于人体时,电机驱动人体,使得施加力和刚强度过大,对患者身体造成二次损伤。这样就产生了柔软的关节,广泛应用于医疗、制造、救援等领域。例如外骨骼机器人、柔性机械臂和足式机器人等机器人[2,3]。
近几年国内越来越多的院校和科研机构对康复设备(柔性关节机器人)进行了研究,并取得了一系列的研究成果。国内外众多学者基于气动肌肉群拮抗驱动装置设计了一种3自由度球关节结构机器人[4,5];设计了一种捆扎交错式气动人工肌肉执行器[6],以此来提高工作效率;在“cheetah”机器人系统中[7],使用拮抗式气动人工肌肉关节结构。也将拮抗式或单/多根气动人工肌肉与改进的多种机构进行结合,设计出了许多新型的柔性关节,包括采用滑轮结构将弹性元件与驱动元件分开布置的气动人工肌肉驱动串联弹性关节[8]、通过利用一组平行的气动人工肌肉束拉动滑板-连杆机构产生旋转运动的PAM-actuated重载机械臂[9]、两根气动人工肌肉和两根弹簧并联的四杆关节机构[10,11]等等。
1 机械设计
人体下肢膝关节自由度是1,即,如图1。只完成一个转动输出。关节总体可将其分成三个部分,包括:气动人工肌肉驱动部分;磁流变液制动器刚性调节部分;连杆联动部分。即:在人工气动肌肉在拉伸的过程中,连接着磁流变液制动器,通过调节引入的电压电流,改变制动器的阻抗强度,给人工气动肌肉拉伸的柔性不稳定性,提供一定的转动刚度,稳定的将驱动转力传送到小腿骨的关节,带动患者稳定行走。
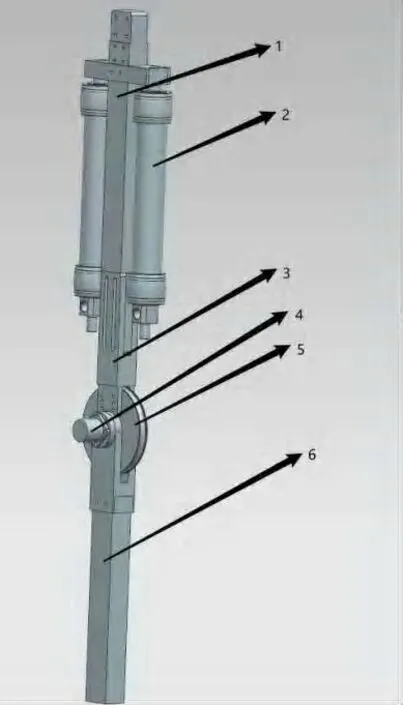
图1 MRB-PAM复合驱动膝关节
2 运动分析
在本文的MRB-PAM复合驱动仿生肩关节中,大腿端为固定端,气动人工肌肉、磁流变制动器与小腿端为运动部件,运动部件的动能Eki为

系统势能。各连杆势能为

MRB-PAM复合驱动系统的拉格朗日动力学方程为

式中τ是MRB-PAM仿生膝关节摆动运动和气动人工肌肉拉缩运动的驱动力矩,Ek为系统动能,Ep为系统势能。
小腿端的惯量矩阵为:

可以求出关节的总动能为

将式(1)代入式(5)得

系统势能表达式为

分别对系统的动能和势能求偏导为:
得出MRB-PAM关节的动力学模型,即

将式(11)写成矩阵形式为

式中:D(q)为惯性矩阵;C(q,q)表示离心力项;G(q)表示重力项;q表示关节角度,q表示关节角速度,q表示关节角加速度。


3 MRB-PAM复合驱动仿生肩关节的仿真模拟
PAM具有形变率大、易控制等突出优点,但与此同时,PAM还具有高度非线性、时变不确定性、响应滞后性和受环境温度影响大等特点[12],采用PAM与MRB的复合控制方式,利用磁流变阻尼器的柔性缓冲特性来弥补PAM控制精度较低的缺陷。采用RBF自适应控制对关节进行仿真。通过补偿,实现复合仿生关节的高精度跟踪[13]。

将式(13)代入式(16)可得到RBF自适应控制动力学模型,其中为τd未知项。
位置指令为:

被控对象的初值为

运用MATLAB编写程序,基于RBF自适应控制对关节建立Simulink仿真模型,对MRB-PAM关节进行仿真,仿真结果如图2~图7所示。

图2 Simulink主程序

图7 关节的建模不确定项逼近及其估计
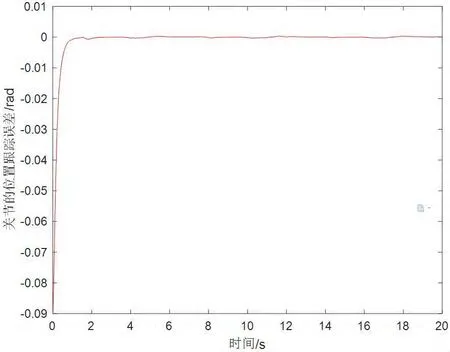
图6 关节的位置追踪误差
由图3可以看出,仿生关节位置跟踪大约在2.14s的时候跟踪期望轨迹。由图4可以看出,仿生关节速度跟踪大约在1.46s的时候跟踪期望轨迹。由图5可以看出,仿生关节控制输入,1.58s之后控制趋于平稳。由图7可以看出,仿生关节建模不确定项逼近及其估计,估计值滞后于逼近值。

图3 关节的位置追踪
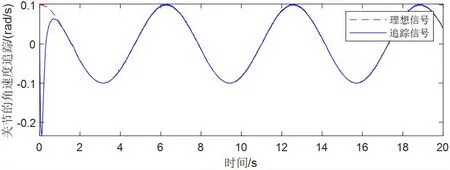
图4 关节的速度追踪
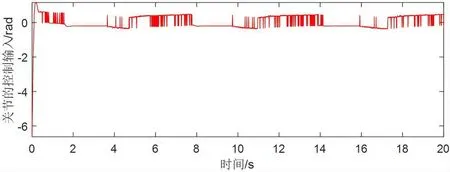
图5 关节的控制输入
对比以上图可以发现,通过系统对不确定项的逼近,仿生关节运动只在初始2.14s内有较小误差,随后的位置跟踪基本与理论轨迹重合。从仿真结果可以得出,采用控制方法不仅可使仿生关节获得很好的位置跟踪性能和速度追踪性能,并大大降低了位置跟踪误差;很好地验证了本文的仿生关节的问题。
4 结论
在关节重载的情况下很难精确控制的问题,提出了MRB-PAM仿生关节;构建了MRB-PAM复合仿生关节的动力学模型;对MRB-PAM关节进行了仿真。结果显示仿生关节位置跟踪大约在0.85s的时候跟踪期望轨迹。仿生关节速度跟踪大约在0.75s的时候跟踪期望轨迹。结果表明,MRB-PAM复合生物关节的精密度、精密度和负重承受能力都很好,验证了MRB-PAM复合仿生关节结构的合理性。
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30
天然气与石油(2022年4期)2022-09-21
石油沥青(2021年5期)2021-12-02
北京航空航天大学学报(2021年6期)2021-07-20
文化创新比较研究(2020年7期)2021-01-13
测控技术(2018年9期)2018-11-25
凿岩机械气动工具(2014年3期)2014-03-01
棋艺(2001年7期)2001-06-14
