变体飞行器智能变形与飞行控制技术研究进展
2022-12-25 07:46甄子洋陆宇平
南京航空航天大学学报 2022年6期
甄子洋,刘 攀,陆宇平
(南京航空航天大学自动化学院,南京 211106)
变体飞行器是一种无需使用常规控制机构,而通过改变飞行器外形以实现任务改变或提供机动控制的飞行器。狭义范畴的变体飞行器主要是指通过改变机翼后掠角、展弦比、翼型厚度和后缘弯度等来实现不同气动构型[1]。采用变形技术的飞行器具有显著优势,能够执行多种类型任务或者传统操纵面无法实现的机动。随着空气动力学和飞行控制技术的不断进步,具有显著灵活性和机动优势的变体飞行器受到越来越多的关注,并在智能材料和结构等关键技术的支撑下,成为了航空、航天、兵器等领域的研究热点,显露出了巨大的应用前景。
从20 世纪50 年代开始,美欧各国相继开展了不同层面的研究,取得了许多有价值的研究成果。在20 世纪60 年代,为了使飞机兼顾低速起降和高速巡航间的飞行任务需求,研制出了具有工程实用性的变后掠翼飞机[2]。目前大部分飞行器是针对其飞行任务和需求进行差异化设计,对于不同任务需求的飞机,其气动布局会存在显著差异,外形上也是各不相同。总体来看,变体飞行器的发展主要经历了以下两个时期:(1)通过机械的方式变形,主要是变展长、变弦长、斜变形和变后掠等变形方式,其发展历程总结如图1 所示[3];(2)通过采用智能材料或结构的方式变形,以美国的相关研究计划为代表,如表1 所示。
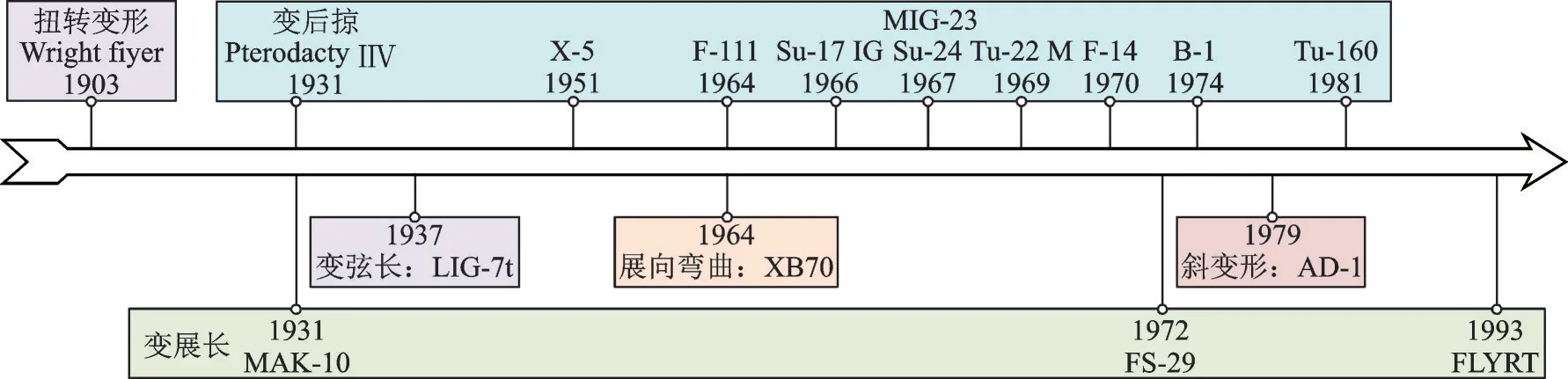
图1 第一阶段变体飞行器的发展历程Fig.1 Development history of morphing aircraft during the first phase
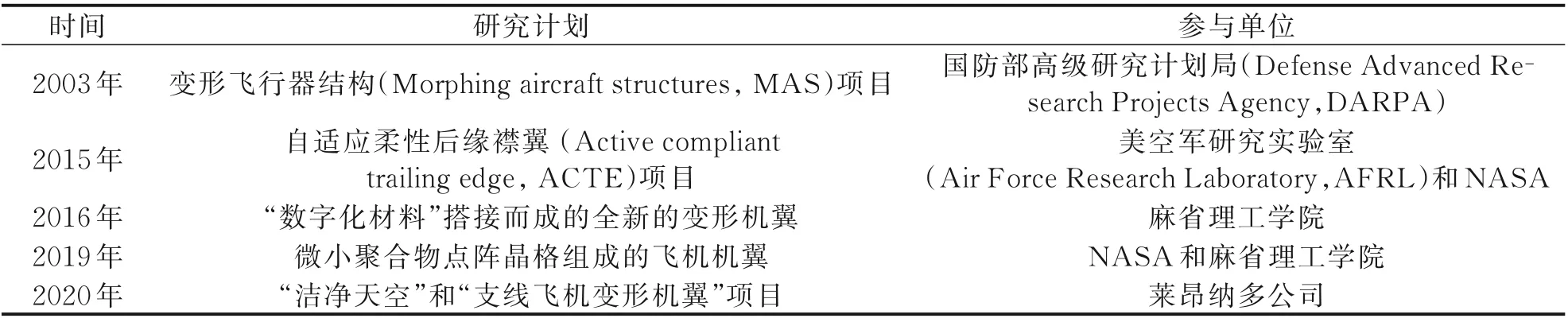
表1 第二阶段美国变体飞行器相关研究计划及实验Table 1 Research plans and experiments of U.S. morphing aircraft in the second phase
中国在进入21 世纪之后也加大了对变体飞行器技术的研究力度。航天一院、国防科技大学以及西北工业大学等科研机构和高校在变体飞行器的结构设计、材料改进、控制分析等方面取得了较多成果。南京航空航天大学的陆宇平、江驹、甄子洋等长期从事变体飞行器技术研究[4]:(1)针对低速航空飞行器,建立了变翼展/变弯度/变后掠角/折叠翼飞行器的动力学模型,并提出了相应的鲁棒和非线性控制方法[5⁃11];(2)针对高速空天飞行器,建立了伸缩小翼高超声速飞行器的气动和动力学模型,并提出了自适应和智能控制方法[12⁃17]。本文介绍了国外技术的发展现状,总结了本团队近年的研究工作,旨在抛砖引玉,促使变体飞行器技术得到更大重视和广泛研究。
1 变体飞行器分类及特性分析
变体飞行器是一类可以实现在空间和时间上连续变形的飞行器,能够针对实际的飞行任务和环境改变外形结构,使其在不同的飞行过程始终保持优异的飞行性能。
1.1 总体分类
变体飞行器可按如下几种方式进行分类[5]。
(1)按照变形的尺度可分为3 类:①小尺度变形,即对机翼局部的改变;②中尺度变形,即对机翼翼型的改变;③大尺度变形,即对机翼整体的改变。如图2 所示,3 类不同尺度的变体方式对飞行器外形结构的改变程度逐渐加大,对气动特性影响也逐渐增强。
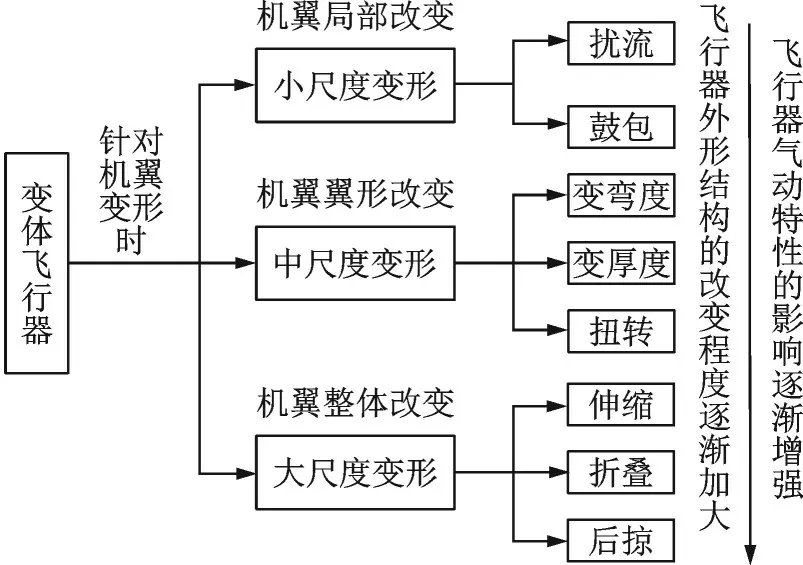
图2 变体飞行器基于机翼变形尺寸的分类Fig.2 Classification of morphing aircraft based on wing de⁃formation size
(2)按变形方式可分为两类:①刚性变形,指通过后掠翼、折叠翼和伸缩翼连续动作改变飞行器外形;②柔性变形,指应用滑动蒙皮、形状记忆合金等智能材料来实现变形。
(3)按机翼变形部位可以分为两类:①平面变形,包括变弦长、变后掠角和变展长(图3),以及改变机翼展长方向的弯度;②翼型变形,包括变厚度和变弯度。

图3 机翼平面变形示意图Fig.3 Schematic diagram of plane deformation of wings
(4)按照变形的实现过程可分为2 类:①通过控制机械结构变形,有望应用于整体变形;②使用智能材料、结构和控制实现变形,可用于局部变形。其中第1 类变形已在工程中获得了良好实践。
1.2 特性分析
总体来看,变体飞行器的优势特性如图4 所示。其中改善气动特性是变体带来的直接效益。机翼是影响变体飞行器特性及其气动升力的关键部件,因此改变机翼的相关参数可以实现不同的气动性能,如提高或降低其升力系数,增大升阻比、巡航时间和距离等。在表2 中详细概述了变体飞行器气动性能与机翼主要参数之间的关系[6]。除上述气动特性之外,翼型效率、气流分离等特性和机翼弯度参数有关;诱导阻力和根梢比参数有关。
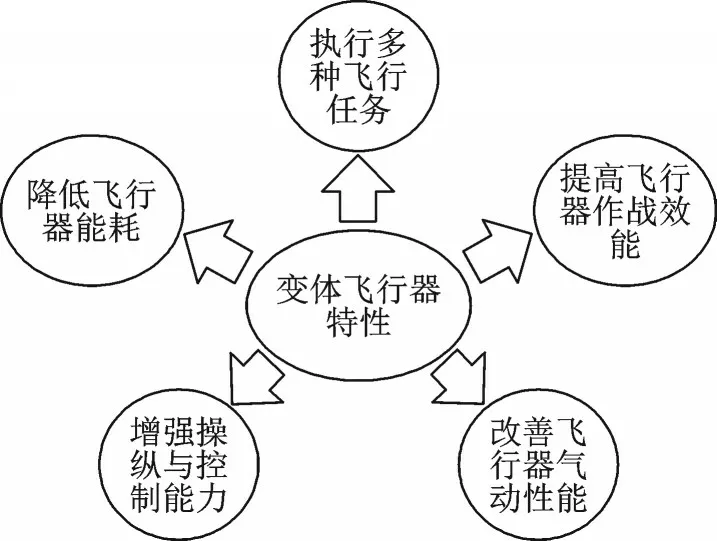
图4 变体飞行器特性描述Fig.4 Characteristic description of morphing aircraft
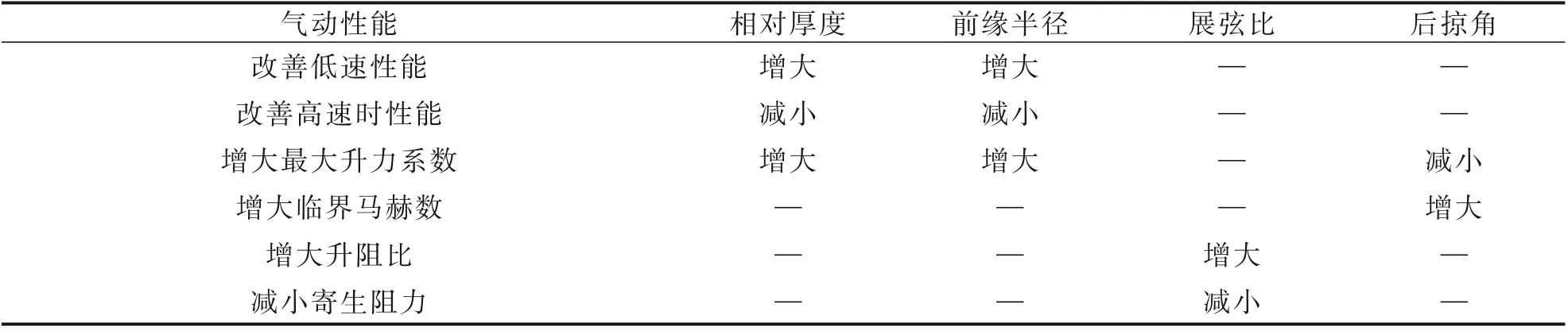
表2 气动特性与机翼主要参数的关系Table 2 Relationship between aerodynamic characteristics and main parameters of the wing
2 智能变形结构
变体技术启发于鸟类在不同环境和不同飞行要求下的表现。变体飞行器的目标就是在不同飞行条件下获得最高的飞行效率和最大的性能。实现飞行器构型变化的前提,是其材料及结构必须具有易于控制、可变刚度和承受大量应变能力等特点,基于传统的机械和液压系统设计的变形部件带来的重量增加是不可接受的,而智能化的变形结构与材料为设计变体飞行器提供了新的可能性。
变形机构是实现“变体”的部件,其变形机构常采用的驱动器主要有[6]:压电驱动器,形状记忆合金,液压驱动器,线性机电驱动器,绳索传动的柔顺机构,基于智能材料的驱动器。
当前研究较为广泛的自适应机翼结构主要包括以下4 种。
(1)扭矩自适应机翼系统
20 世纪90 年代,由诺斯罗普·格鲁门公司提出了扭转自适应机翼系统(Twist adaptive wing sys⁃tem,TAWS),并与美国空军研究实验室合作研究,图5 为TAWS 的概念图,展示了所拥有的具有新型外翼面的无人机[18]。
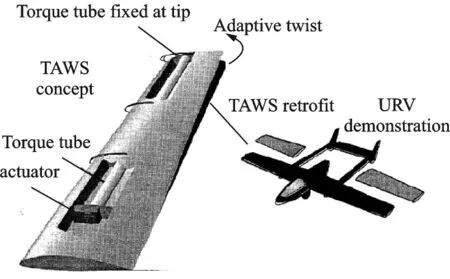
图5 TAWS 简单概念形式Fig.5 Simple conceptual form of TAWS
(2)扣翼结构
美国圣母诺特丹大学正在研究中的变型无人机概念被称为扣翼无人机。该无人机可以将机翼构型从单个机翼更改为在两端连接的两个机翼,如图6 所示。该项目的研究重点包括设计带扣翼无人机的机翼横截面。扣翼式机翼几何形状的设计可视为多层次、多目标的优化问题。该设计问题包括机动性和航程2 个相互矛盾的目标[19]。
图6 扣翼无人机概念Fig.6 Concept of the clasp⁃wing drone
(3)翼型肋骨滑动结构
美国Cornerstone Research Group 公司的研发小组为变形机翼的下层结构开发了一种滑动翼型肋骨概念,该翼型肋骨与致动器和无缝蒙皮集成在一起,如图7 所示[20]。

图7 CRG 翼型肋概念Fig.7 Concept of the CRG airfoil rib
(4)可变几何形状的蝙蝠翼帆结构
通过模拟蝙蝠机翼的骨骼/肌肉结构,也可以开发出可变几何形状的机翼,为变形机翼基础结构提供了一个新来源[21],如图8 所示。这种帆架有着极强的适应性,可以随着环境条件的变化而改变。除了依赖于空气动力载荷作用下的变形,它还可能随着速度增加而改变形状。该帆架结构可以很好地承受高扭曲力,并且结构轻巧。
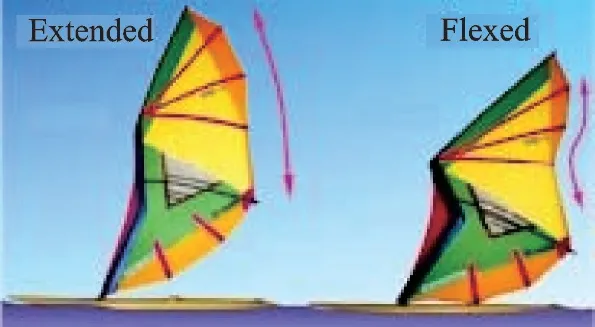
图8 可变几何形状的机翼Fig.8 Variable geometry wings
关于智能材料和结构的技术仍然不够成熟,要真正应用到变体飞行器仍有待进一步深入研究。为了充分发挥智能材料和结构的潜力,需考虑多尺度设计并开展多学科的研究合作,并主要解决以下几个方面问题:①改进材料性质,在当前智能材料的基础上,通过分子重组技术等进一步提高其性能,使其更加具备实际应用条件;②加入功能添加剂,可将添加剂(如碳纳米管、炭黑、石墨、铁粉和镍粉)加入到智能复合材料中,使其具有多功能性;③优化材料结构,可以使用拓扑优化方法设计优化的结构,也可以通过应用新概念来发现新结构;④考虑材料的混合应用,可以使用各种智能材料构建新颖的结构。
3 动力学与智能控制
变体飞行器的建模及控制与其自身的特性密切相关。首先是变体飞行器的动力学模型就与传统固定翼飞机有所不同。由于在飞机的变形过程中,其质心位置和转动惯量并非是常值,而是一个时变函数,因而变体飞行器不能被近似为一个完整的刚体,因此,需要综合考虑可变质心、可变转动惯量以及非完整刚体等因素,并选择合适的建模方法。
3.1 动力学建模
变体飞行器因其变形结构的复杂性导致建模较为复杂,主要有以下3 种方法。
(1)变形关联气动建模方法
气动参数的变化主要与变体飞行器的外形改变相关,因此可以通过气动分析建立气动力和飞行器变形参数的联系,进而得到带有变形参数的动力学模型。但此种建模策略的准确性较差,只用于飞行器预研阶段的初步研究。
(2)放松刚体刚性条件建模方法
将飞行器转动惯量矩阵中的每个方向的转动惯量考虑成时变函数。同时,飞行器质心的偏移会使得运动方程组中多出一些由质心偏移引起的额外项。但这种方法会忽略执行器动力学。
(3)多体系统动力学建模方法
飞行器的每个部分当成是独立的刚体,但其可运动部分的划分情况可能不一样,故而可能会获得弱耦合的微分方程组或者是强耦合的、具有高度非线性特征的微分方程组,计算量较之刚体动力学更大。
目前,研究中常用Datcom、CFD 等仿真软件获取变体飞行器的气动数据。如弗吉尼亚理工大学以Teledyne Ryan BQM⁃34 火蜂无人机为研究变体飞行器的平台,基于主流的空气动力学建模的方法,采用Datcom 计算飞机的气动数据,专门针对变形控制,开发了一种用于变体飞行器的空气动力学表示方法[22]。而位于弗吉尼亚州的Bar⁃ron Associates 公司将其研究聚焦于新一代航空技术公司(NextGen Aeronautics)设计的N⁃MAS 机翼,这种两自由度的机翼可以同时改变后掠角、展长、机翼面积和弦长,以有利于各种飞行条件,同样采用了Datcom 软件计算变形飞机的静态和动态稳定性导数[23]。西弗吉尼亚大学基于Horten型后掠翼无尾飞机,开发了多个CFD 模型,重建了变形设计的实验气动数据,以更好地理解流动物理,这些CFD 模型已被用于研究各种翼型结构周围的压力和流场[24]。英国克兰菲尔德大学针对一种具有高空和长航时特性的飞行翼配置飞机FW⁃11,建立了气动模型和载荷模型,并估算了机翼的气动特性[25]。
3.2 智能控制技术
从原理上看,变体飞行器和传统飞行器在控制上有较多共同点,但由于变形带来的动力学特性的改变和其他不确定性等因素使其控制存在较多难点。一方面,假设变形为外部给定指令,则所设计的控制器只需在变形中保持稳定的飞行状态,不需考虑如何实现变形,这类问题基于传统的控制方法也能很好的解决;另一方面,受鸟类生物学启发,假设将变形量作为系统的新输入,则需考虑变形和飞行状态耦合的协同控制问题,为了使其具有自主变形的决策能力,还可引入深度学习、强化学习等先进智能方法。
(1)经典控制方法
经典控制方法目前已在航空航天等实际工程中广泛应用,在变体飞行器的控制器设计方面,克兰菲尔德大学针对柔性变形飞机AX⁃1 设计控制增稳系统(Control and stability augmenta⁃tion systems,CSAS)和减载功能(Load alleviation function,LAF)作为飞控系统的一部分,为柔性飞机AX⁃1 模型开发了C*纵向CSAS 控制律和RCAH 型 横 向CSAS 控 制 律[26]。加 拿 大 多 伦 多大学解决了变体飞行器执行器饱和及卡住故障下的容错控制问题,控制器根据空速获得调度,以消除卡住故障对系统输出的影响,并避免闭环性能下降[27]。
(2)现代控制方法
由于变体飞行器的动力学模型具有不确定性,为了满足不同任务需求下的变形控制,常采用现代控制方法进行控制器的设计。其中,NASA 艾姆斯研究中心针对柔性翼飞行器开发了一种自适应输出反馈控制策略,以适应参数不确定性或空气动力学和结构参数的缓慢变化,并引入多目标优化技术以控制具有灵活机翼的飞机模型,证明了具有最优控制器的特定权重结构的 稳 定 性[28⁃29]。麻 省 理 工 学 院 针 对 具 有707 个状态、12 个输出和2 个控制输入的变体飞行器设计了一种模型参考自适应控制器,确保在不同的机翼形状和执行器异常下的稳定性[30]。佛罗里达大学将变形假定为准定常过程,每种配置设计最优LQR 或鲁棒H∞控制器,并进行切换或调度,采用模型参考自适应方法补偿建模误差,增强系统鲁棒性[31]。威奇托州立大学为具有可移动后缘的变体飞行器开发了分布式参数模型,并设计了一个自适应优化控制器,以最大化与升力相关的性能指标[32]。中国高校的研究人员主要针 对 变 体 飞 行 器 的 LPV (Linear parameter⁃varying)模型,基于LQ(Linear quadrat⁃ic)最优控制[33]、鲁棒增益调度[34]、滑模自适应[35]等理论方法,设计了变形过程速度、高度保持控制器。
(3)非线性控制方法
文献[23]提出了间接自适应控制方法,并对MFX⁃1 变体飞机模型进行了两个飞行控制案例仿真,验证了飞机在机翼变形过程中的稳定性。密歇根大学考虑了两种模型预测控制(Model predic⁃tive control,MPC)架构,通过对柔性翼飞行器的非线性模型进行数值模拟来评估和比较,讨论了与MPC 设计中使用的预测模型的准确性相关的问题[36]。南京航空航天大学甄子洋团队在变体飞行器非线性控制领域进行了深入研究:提出了基于回馈递推的智能非线性控制方法,综合考虑可变翼和外界未知干扰等因素,解决了可变翼高超声速飞行器的跟踪控制问题和近空间可变翼飞行器在模态切换时存在参数不确定性等一系列问题[12⁃13];为避免小翼伸缩引起参数摄动,导致其控制量和状态量发生跳变,提出了一种结合了神经网络的自适应滑模控制方法[14];基于变换模型的变体高超声速飞行器的跟踪控制问题,还提出了一种自适应反步控制方法,并设计了一种投影算子来避免奇异问题[15]。
(4)智能控制方法
伴随着人工智能技术的成熟,以及变体飞行器逐渐朝智能化方向发展,人工智能方法在变形控制中有了越来越多的应用。美国得克萨斯A&M 大学提出了一种改进的自适应强化学习控制方法以解决无人机的变形问题,结合了强化学习的变形控制功能与自适应的控制轨迹跟踪功能,该方法能够学习所需的形状并变形,对存在参数不确定性、干扰等情况也能准确跟踪参考轨迹[37]。近年来,国内研究机构将人工智能广泛引入到变体飞行器中,如文献[38]基于深度强化学习对变体飞行器进行了训练,通过变形使其保持外形最优;文献[39]提出了基于增强学习理论的新型翼型自适应控制方法,该方法可在变形过程中根据飞行条件智能化的选择最优构型,并保持稳定飞行;文献[40]将深度强化学习算法应用到了一种可同时改变展长和后掠角的变体飞行器中,以飞机状态量和当前变形量为环境状态,设计了含稀疏奖励的奖励函数,进行了智能体训练以及变形控制的性能测试;文献[41]将人工智能算法引入了变体飞行器的变形决策设计,提出了强耦合和不确定性下的智能自主控制方法。
4 变体技术应用现状
由于变体飞行器具有传统固定结构飞行器所无法比拟的优势,加之新材料、新技术和新方法的进一步革新应用,近年来变体飞行器有了更为广泛的发展,这一技术应用在了微小型飞行器、无人机、战斗机、高超声速飞行器和导弹等多个领域。由于各类飞行器适用范围有本质上的区别,变体技术在不同飞行器的应用也各有侧重,主要可分为低速和高速两大发展方向。
4.1 低速飞行器
面向低速领域,变体技术主要应用到了微小型飞行器及无人机上。这些飞行器的体积小,飞行速度低,对环境的影响较小。由于其被期望是无人的,因此可以不考虑生命支持系统,设计及制造的成本也较低,并且相关飞行性能指标也会有更高的灵活性,有着广泛应用前景。低速无人飞行器近年来受到国内外的广泛研究,技术成熟度高。
(1)变后掠翼变体飞行器
对变后掠翼的研究始于20 世纪40 年代,而实用的变后掠翼飞机出现于20 世纪60 年代[7]。常见的变后掠翼变体方式如图9 所示。大后掠角的翼型适用于高速飞机,该翼型可减小飞行器的激波阻力,但无法在低速飞行提供较高升力,且诱导阻力较大,此时便可以选择小后掠角的翼型,提高气动效率。
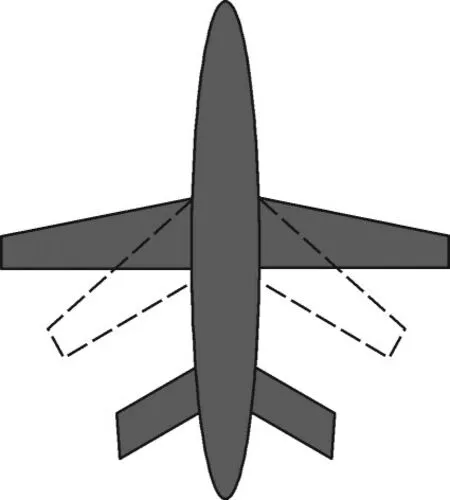
图9 变后掠翼变体方式Fig.9 Variations of the swept⁃back wing
研究表明,变后掠可有效提高微型飞行器在大速域下的飞行性能。例如美国科罗拉多大学所研究的一种微小型变后掠翼飞行器,后掠角从15°变化至65°时,其阻力系数减小了将近60%[42]。2006年,佛罗里达大学的Grant 等研究了具有变后掠能力的微型飞行器,研究证明了对称变形可减小转弯半径,而不对称变形则可在侧风中保持指向[43]。2011 年,Grant 还研究了一种利用机翼变形或形状变化概念的微小型仿生飞行器(具有鸟类飞行的一个共同特征),如图10 所示,可以在水平和垂直两个方向实现变形[44],这种具备结构、形态和功能等多方面的仿生能力的变体飞行器,近年来受到越来越多的研究与关注。
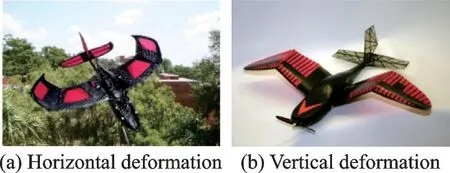
图10 可变形微小型飞行器Fig.10 Deformable miniature aircraft
2003 年,美国马里兰大学的Marmier 设计了可在不同任务下变形的变后掠翼机构[45]。2006 年,弗吉尼亚理工大学的Neal 等研究了可用于变体无人机的三连杆变后掠机构,其变化范围可达40°,如图11 所示[46]。

图11 Neal 等设计的变后掠飞行器Fig.11 Variable sweep aircraft designed by Neal et al.
(2)伸缩翼变体飞行器
美国飞机设计师Burnelli 在1929 年设计并首飞了GX⁃3 飞机,开创了伸缩机翼的新领域,如图12 所示[47]。由表2 中变体飞行器相关特性可知,大翼展适合低速飞行,增加巡航时间,小翼展适合快速机动飞行,通过改变翼展可进一步拓宽飞行器的飞行包线。由于伸缩翼具有很强的承弯能力,其集中动态载荷相对分散且只存在于内外翼连接处,因此有相当大的潜力应用于各种中、大甚至超大展弦比的飞机上。
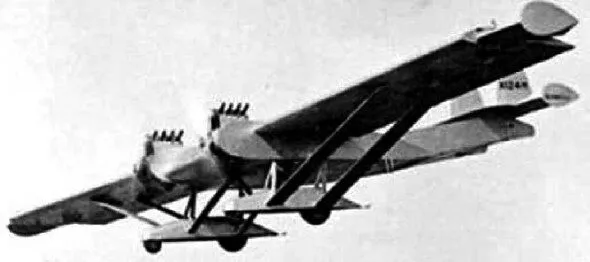
图12 GX⁃3 伸缩翼飞机Fig.12 GX⁃3 aircraft with stretching⁃wing
对于小展长的变展长无人机,虽然气动效率差,但是有快速的大机动能力。近年来受到了大量关注,军用无人机设计成这种变形形式将会有很大优势。2004 年Neal 等还设计了一个变展长变体无人机,该无人机可通过致动器使展长最多增加38%,如图13 所示[48]。
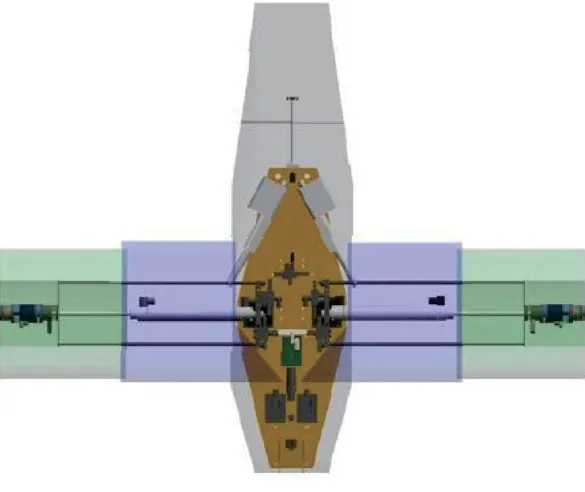
图13 Neal 等设计的变展长飞行器Fig.13 Variable⁃stretch aircraft designed by Neal et al.
美国马里兰大学的研究人员采用了NA⁃CA0013 机翼设计变展长小型无人机,并设计了一种可伸缩的网状机翼骨架,并且覆盖了弹性增强纤维蒙皮[49⁃50]。同年,贝拉大学分别研究了变展长无人机在不同速度下的飞行特性,研究表明40 m/s时可减小20%的飞行阻力[51]。英国斯旺西大学研究了锯齿形状的可变翼展的飞行器[52⁃54]。
(3)折叠翼变体飞行器
相关概念最早出现在1932 年,但未发展出具体的理论。当前由洛克希德·马丁公司提出了主流的具有很好可行性和实用性的折叠机翼变体飞机,如图14 所示[55]。与变后掠和变展长等常规变体飞行器相比,这种飞机在变形过程中既有机翼展长的变化,同时也有机翼后掠角等参数的变化,因而折叠翼形式的变体飞行器更能够通过改变机翼外形来完成多种飞行器任务,实现飞行效率的最大化,该方案相较于常规变体飞行器和传统固定翼飞机都具有相当明显的设计优势。

图14 洛克希德·马丁公司的MAV 系列折叠机翼飞机Fig.14 Lockheed Martin’s MAV series folding wing aircraft
4.2 高速飞行器
面向高速领域的变体飞行器主要发展于20世纪60 年代左右,美苏等国研制了一大批具有工程实用性的变后掠翼高速飞行器。例如,由前苏联 研 制 的 图⁃160、米 格⁃23 和 米 格⁃27 飞 机;由 美 国研制的F⁃14、F⁃111 和B⁃1 飞机。而为了进一步实现飞行器跨空域和跨速域的最优飞行,可以在传统高超声速飞行器中应用变形技术,实现跨域化的发展目标。在变体高超声速飞行器方面,目前主要仍停留在概念设计和数字仿真阶段。国防科技大学的黄明晗对高超声速变形飞行器的外形总体尺寸进行了概念设计,并设计了两种弹翼变形方案[56]。湾流宇航公司(Gulfstream Aerospace)为改善起降及超声速飞行时的飞机性能,提出了基于头部伸缩和后掠角变形的超声速喷气机方案(图15)。
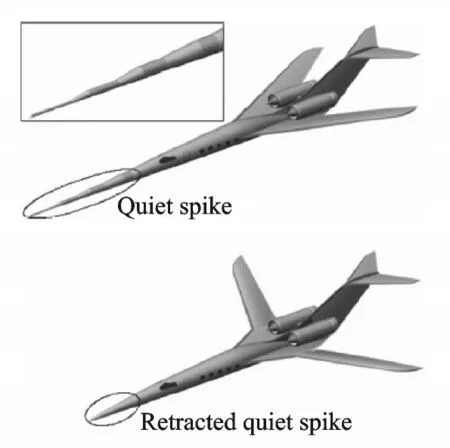
图15 变形静音超声速喷气机方案Fig.15 Scheme of deformed silent supersonic jet
南京航空航天大学的江驹、甄子洋团队针对带伸缩小翼的临近空间高超声速飞行器的轨迹制导与飞行控制进行了深入研究。在X⁃24B 飞行器翼梢安装可伸缩小翼(图16),通过机翼浸润面积实现控制性能的改善[13]。为了解决近空间可变翼飞行器的在小翼伸缩状态下的燃油轨迹优化问题,提出了一种改进的多段整合优化的高斯伪谱法的求解方法,减小了计算量并提高了优化精度[16];小翼既可以作为气动升力面,水平起降阶段伸出小翼可以提高升阻比,巡航阶段收回小翼可以减小气动阻力,同时它又可以作为操纵机构,改善不同飞行模态下的气动效应及机动能力[17]。
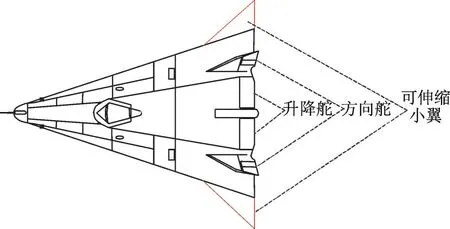
图16 带伸缩小翼高超声速飞行器方案Fig.16 Hypersonic vehicle solution with telescopic winglets
而无论是有人机还是无人机,在设计变体飞机时都需要考虑飞行器的回收问题,这也对变形机构的设计提出了较高的要求。为满足飞机设计的基本需求,不得不对其变形功能加以限制或妥协。而变形翼导弹不需要考虑这个问题。因此,在导弹中应用变形技术可以更好地发挥变形带来的巨大优势。在变形翼导弹领域,主要以美国雷神公司基于“战斧”式导弹改进的可变展长导弹为代表,并经过了可靠性验证,如图17 所示。美国也研究了倾斜弹翼(Oblique wing)式的巡航导弹,低速时,弹翼与弹身垂直,而在高速时弹翼通过变形与弹身平行,可在一定程度上减小阻力[57]。
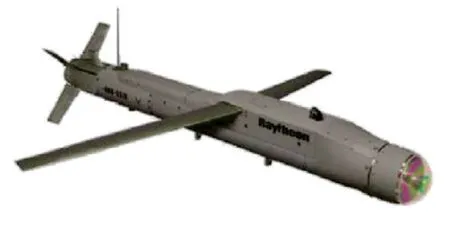
图17 美国雷神公司的伸缩翼方案Fig.17 American Raytheon’s telescopic wing solution
在2004 年,弗吉尼亚理工大学的Bae 等深入研究了一种可变翼展巡航导弹的气动及气弹特性,该弹外形和“战斧”类似,其展长可变范围为50%[58]。2005 年Bae 等建立了机翼气动和结构的理论模型,并以“战斧”导弹为基础设计了新型变展长导弹,减小了诱导阻力并增加了射程[59]。中国也有科研高校进行了这方面的研究,其中西北工业大学从延提出了组合变形翼导弹的概念(图18),在设计中综合考虑气动、隐身、容积最优等约束,并得到最优性能的外形[60]。西北工业大学的王江华等对固定翼和伸缩翼的外形参数进行了优化,表明伸缩翼可有效改善导弹的气动性能[61]。北京航空航天大学的魏东辉等针对变形飞行器协同控制需求,明确了变形协同控制总体流程和方案[62]。
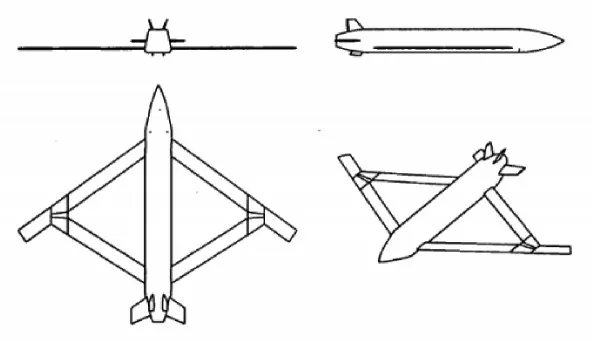
图18 组合变形翼巡航导弹概念Fig.18 Concept of the combined deformed wing cruise mis⁃sile
5 结论与展望
经过几十年的发展,变体飞行器技术取得了长足进步。然而,变体飞行器的外形不断变化,使得在设计上比传统固定翼飞行器具有更高的要求,因此变体飞行器相关的结构、材料、飞行控制等关键技术仍然有广阔的研究空间。
(1)全局高度仿生化和高速跨域化是满足未来不同需求的主要设计方向。高度仿生化是指飞行器具备在结构、形态、功能等多方面的仿生能力。高速跨域化是指通过变形技术解决传统高超声速飞行器无法实现高低空、高低速下的最优飞行匹配能力。未来的变体飞行器可根据空域与速度主动地改变其气动布局,以适应跨域飞行任务。要真正实现仿生化或跨域化的发展目标,不能简单将飞行器设计中的各关键技术割裂开来,而是从系统层面,综合考虑变形结构、材料和控制方法。随着变形结构及驱动技术不断发展,涌现出一批以压电作动器和形状记忆合金作动器等为代表的新型智能驱动器,与目前重点发展的纤维增强柔性材料为代表的新型智能材料一起,为变体飞行器系统级设计提供了有力支撑。
(2)结构与控制耦合影响机制研究对于发挥控制器作用至关重要,是未来解决变体飞行控制问题的关键所在。无论是将外形和飞行控制分开,还是同时实现变形协同飞行控制,均需要一种可感知精确变形的分布式传感器,而这也离不开智能材料的有力支持,并随着柔性传感技术的发展,未来可将变形结构与分布式变形传感器相结合,形成可实时感知载荷与变形参数的智能变体结构,最终实现变体飞行器在高速高低温、高低气压等特殊环境下的稳定飞行。
(3)智能材料和变体结构驱动一体化设计是一个亟待攻克的关键技术方向。未来变体飞行器的驱动器应该具有轻质高效、高精度、快速响应、结构紧凑等能力,驱动器的复合主动材料须权衡考虑刚性、挠性和轻量化要求,以便能够承受飞行负载,满足飞行器对构形变化和质量要求。
变体飞行器作为一种未来飞行器的主要发展方向之一,涵盖了总体布局、变形结构及驱动、智能材料、动力学建模、飞行控制等多个学科的前沿核心技术。本文主要从分类、结构、材料和控制方面对微小型飞行器、无人机、高超声速飞行器以及导弹等领域的应用现状进行了描述,并系统性总结了结构、材料和控制在变体飞行器中的综合设计思路,为变体飞行器未来的设计发展方向和多学科技术的综合运用提供参考。
猜你喜欢
天然气与石油(2022年4期)2022-09-21
北京航空航天大学学报(2022年5期)2022-06-06
北京航空航天大学学报(2021年6期)2021-07-20
北京航空航天大学学报(2020年10期)2020-11-14
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
小型微型计算机系统(2018年6期)2018-07-04
劳动保护(2018年5期)2018-06-05
北京航空航天大学学报(2017年6期)2017-11-23
计算机系统应用(2017年10期)2017-10-20