考虑锁相环角频率变化的单相车网系统动态稳定性分析
2022-12-22 11:49喻文倩刘志刚张友刚刘静伟
电力自动化设备 2022年12期
喻文倩,刘志刚,张友刚,刘静伟
(西南交通大学 电气工程学院,四川 成都 611756)
0 引言
近年来,AC-DC-AC 结构的四象限电压源变流器动车组已被广泛采用[1],一般将动车组与牵引网组成的系统,简称为“车网系统”。通常认为,造成车网系统低频振荡LFO(Low-Frequency Oscillation)现象的主要原因是牵引网和动车组之间参数不匹配[2⁃4]。为揭示LFO 机理,学者进行了大量的研究。文献[3]针对车网系统主导极点的阻尼比进行了分析,提出了欠阻尼机理来解释牵引网电压出现持续大幅振荡的原因。文献[4]针对多车接入牵引供电系统引发的电压波动现象,推导了间谐波在牵引负载牵引传动系统的传播机理。为了避免LFO现象的发生,确保系统可靠运行,研究参数对车网系统稳定性的影响十分必要。
目前,大多文献主要通过建立dq域下的小信号阻抗模型[2,5]对车网系统的稳定性进行分析。虽然此方法的计算步骤并不复杂,但在建模过程中忽略了频率耦合过程,导致其分析结果只在低频段有效,并且存在误差。更进一步,文献[6]采用基于谐波线性化的建模方式,考虑了部分频率的耦合过程,但是忽略了ωp±nω0(ωp、n、ω0分别为扰动角频率、谐波次数以及额定角频率)的频率耦合项。文献[7]基于dq阻抗模型,推导出了αβ阻抗模型,并分析了变换器在整流和逆变2 种工作模式之间切换时,各种参数的临界值变化情况。阻抗模型的本质是对车网系统的输入输出阻抗进行计算,运算过程繁琐复杂。文献[8⁃11]建立了单相整流器的谐波状态空间HSS(Harmonic State-Space)模型,并采用特征值分析了谐波传递函数的动态特性。文献[12]忽略了源侧对负载侧的谐波影响,导致所得模型在工频周围的误差较大。针对HSS 建模过程,所考虑的谐波次数越高,得到的模型才会越精确。假设考虑的谐波次数为n,则每一个对应的频率f,都需要建立一个阶数为2n+1 的方阵,再计算其特征值。假设模型计算时特征值的对应频率为1、2、…、1 000 Hz,则完成整个计算过程需进行1 000 次计算,花费数小时,并占用大量的电脑内存。同时值得注意的是,由于单相整流器的不对称性,与三相整流器相比,单相整流器的阻抗建模过程更加困难,计算也更加复杂[12]。
为了避免输入输出阻抗的复杂计算,本文采用根轨迹法对车网系统进行稳定性分析。该方法无需建立阻抗模型,并且可以缩短程序运行的时间。根轨迹分析法常用于研究参数变化下的系统动态响应[13⁃14],已被广泛用于电力系统稳定性分析[15]。文献[16]利用根轨迹法分析了基于同步逆变器的微电网非线性模型,得到了影响系统稳定的主要参数。文献[17]建立了三相整流器的状态空间平均SSA(State-Space Average)模型,利用根轨迹分析电路和电网参数对系统稳定性的影响以及公共耦合节点PCC(Point of Common Coupling)电压降落对系统的影响。利用design-oriented 方法[18]对参数的稳定区域进行了绘制。文献[19]虽然建立了单相车网系统的SSA 模型,但是没有将锁相环PLL(Phase-Locked Loop)的角频率的动态响应以及控制中的时间延迟纳入建模过程中。与其相比,本文在建模过程中将PLL 的角频率和时间延迟作为状态变量纳入考虑,使模型更加精确,计算结果更贴近仿真和实验结果。
本文首先建立了更精确的车网系统SSA 模型。然后,采用根轨迹和design-oriented 分析方法对车网系统的动态稳定性进行了分析,获得LFO 的各种参数的临界值、振荡频率以及稳定边界,为实际系统中参数的设置提供参考依据。最后将软件仿真和实验测试的结果与理论分析结果进行比较和验证。
1 车网系统的建模过程
本文采用的单相车网系统模型由车载单相整流器等效电路和简化的牵引网络等效电路两部分组成,如图1 所示。图中:us为牵引网侧的等效电源;Ls、Rs分别为牵引网侧的等效电感、电阻;en为PCC 处的电压;in为网侧电流;Ln、Rn分别为车载侧的等效电感、电阻;Cd为直流侧的电容;Rd为直流侧的等效电阻。
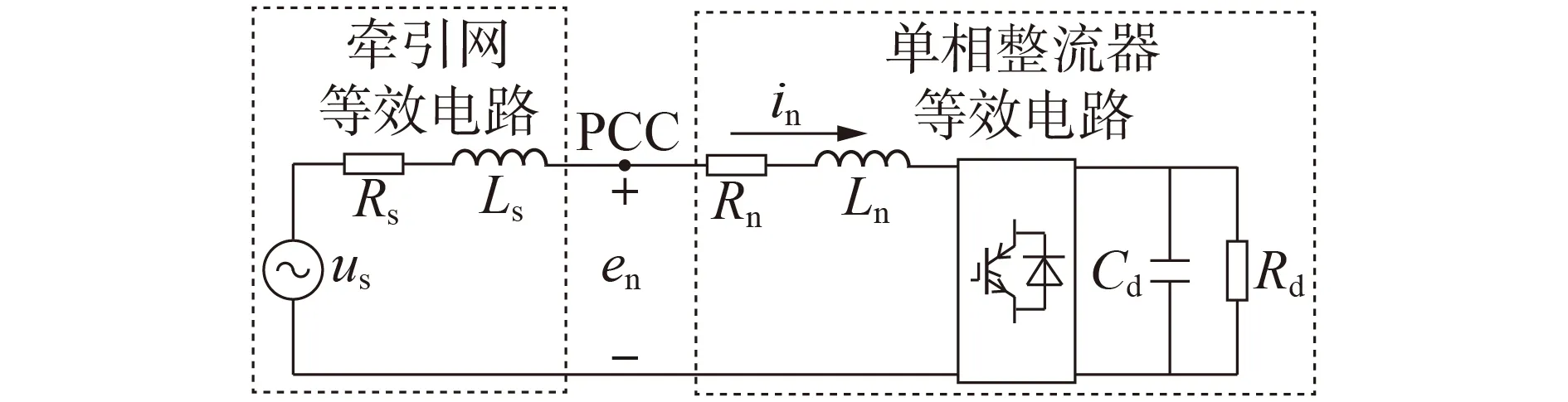
图1 单相车网系统的模型Fig.1 Model of single-phase vehicle-grid system
1.1 单相整流器等效电路建模
为了统一表达式,将整流器系统的所有变量都转换到参考的旋转坐标系中[16]。假设PCC处电压锁定在d轴上,则RL和RC电路的状态方程可描述为:
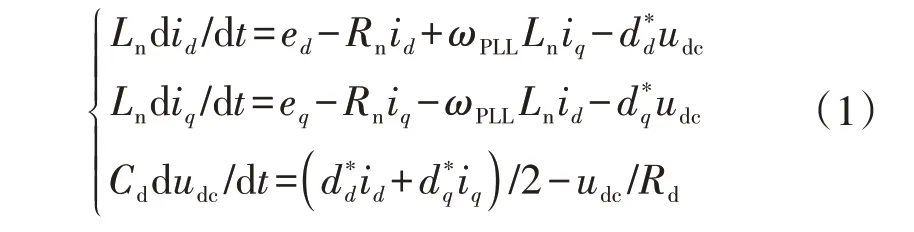
式中:ed和eq分别为PCC 处电压的d、q轴分量;id、iq分别为电网侧电流的d、q轴分量;udc为输出的直流电压;ωPLL为PLL 的输出角频率;、分别为电流内环控制器输出调制比的d、q轴分量。
PLL、电压外环和电流内环的控制结构如附录A图A1所示。值得注意的是,现有研究(如文献[19])大多在理论分析时将PLL 输出的角频率ωPLL视为常数,以简化计算。实际上从图A1 中可以看出,基于二阶通用积分器SOGI(Second Order Generalized Integrator)的PLL 在输出时存在一个小的扰动ωk。如果将输出角度视为一个常数,则无法分析该部分的动态变化,因此,为了获得接近于实际情况的准确模型,本文将此处的动态变化纳入建模过程之中。
PLL和双环控制的表达式为:

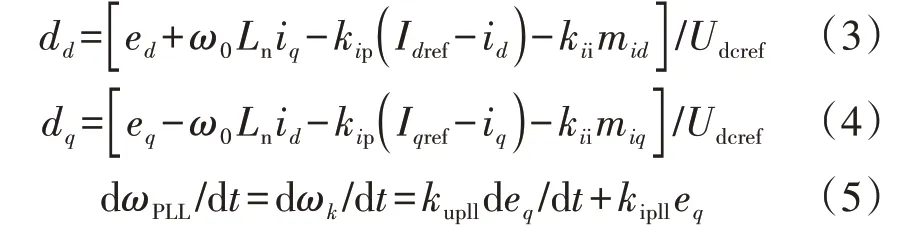
式中:Udcref为直流侧电压的参考值;Idref、Iqref分别为网侧电流d、q轴分量参考值;kup和kui分别为电压外环比例积分PI(Proportional Integral)控制器的比例增益和积分系数;kip和kii分别为电流内环PI 控制器的比例增益和积分系数;kupll和kipll分别为锁相环中PI控制器的比例增益和积分系数;dd、dq分别为电流内环输出的d、q轴分量;mid、miq和mdc为辅助变量,分别满足式(6)—(8)所示的关系。
包含一个采样周期Ts和0.5Ts的脉宽调制PWM(Pulse Width Modulation)零阶保持器的计算延迟的影响,都被考虑到控制环路中,如式(9)所示[15]。
式中:τ=1.5Ts为总时间延迟。通常使用3 阶Pade 逼近来简化式(9),然后将近似的传递函数转换为状态方程的形式,可以表示为:

式中:xx=[x1,x2,x3,x4,x5,x6]T为新的辅助状态变量;yx=[]T为输出变量;ux=[dd,dq]T为输入变量;Ax—Dx为与时间延迟相关的参数矩阵,如式(11)所示。

式中:I为单位阵。图A1 中的PLL 和控制回路的模型可以通过式(2)—(8)表达,后续考虑时间延迟方程则可以通过式(9)—(11)获得,由此可以得到车载侧单相整流器的非线性模型。
1.2 牵引网等效电路建模
考虑到整流器控制系统的复杂性,选择车载侧单相整流器所在坐标系作为整个车网系统的参考坐标系。因此,所有其他变量都需要转换到该dq参考坐标系下进行计算[16]。如附录A 图A2 所示,2 个坐标系之间的转换关系为:

式中:nd和nq为dq参考坐标系中的状态变量;nD和nQ为在原本DQ坐标系中表示的状态变量;θ为车载侧整流器控制中的dq参考坐标系与电网电压所在DQ坐标系之间的相角差,且满足式(13)。

从电源到PCC的动态方程可以表示为:

式中:下标D和Q表示电气量在DQ坐标系中的变量,需要转换到dq参考坐标系中,参与后续的计算过程。从图1 可以看出,由于牵引网络与车载整流器连接处的电流是相同的[17],故可推导出转换到参考坐标系后PCC处电压的d、q轴分量分别为:
基于上面定义的微分方程,图1 所示的单相车载电网系统和图A1所示的控制系统可表示为:

式中:X=[id,iq,udc,mid,miq,mdc,θ,ωPLL,]T为状态变量;v=[udc,udc]T为控制变量;u=[usD,usQ,Udcre]fT为输入变量。
2 车网系统的稳定性分析
单相车网系统参数见附录A表A1。采用牛顿迭代法求出状态变量的平衡点,如附录A 表A2 所示。为研究系统的稳定性,可以通过线性化稳态点附近的非线性模型来获得雅可比矩阵。进而,可以通过相应的特征多项式获得特征值。如果最大特征值的实部从负值变为正值,则系统将出现不稳定现象。
考虑到电网侧电感Ls是牵引网的等效电感,具有实际意义。采样时间Ts也会影响系统的稳定性。直流侧电容Cd不仅可以过滤直流电压,还可以稳定电压。电流内环控制中的比例增益kip也是重要参数之一。且现有研究(如文献[1,6,12])着重对电网侧电感、采样时间、直流侧电容和PI控制器参数进行分析。所选变量特征值轨迹分析结果见附录A图A3。
电网侧电感Ls是影响稳定边界的关键参数之一。如图A3(a)所示,随着Ls从3.7 mH 逐渐增大到4.2 mH,系统的最大特征值的实部也逐渐靠近实部为0的直线,当其数值大于4.1 mH 时,其最大特征值的实部将从左半平面LHP(Left Half Plane)移至右半平面RHP(Right Half Plane)。特征值的实部代表振荡模式的阻尼,而虚部代表角频率。因此同时可以计算出,当Ls=4.2 mH 时,对应的振荡频率是2.1 Hz。换言之,电网侧等效电感值越大,系统越不稳定。当其增加到一定水平时,系统将遇到LFO。类似的结论也适用于PLL 角频率简化为常数的时候,采用文献[19]中的模型计算得到的Ls临界值和LFO的振荡频率与本文结果略微不同,本文在考虑了PLL 动态和延时之后的计算值更加贴近仿真和实验结果。详细数据比较结果将在第4节表1、2中给出。
当将采样时间Ts选择为变量时,随着采样时间的增加,其特征值的变化如图A3(b)所示。当Ts增加到2×10-4s 时,最大特征值出现在RHP 中,表明系统出现了振荡,振荡频率为3.1 Hz。值得注意的是,文献[19]中并未考虑延时带来的影响,因此无法对Ts进行理论分析。
以直流侧电容Cd作为跟踪系统特征值的变化参数的特征值轨迹,如图A3(c)所示。当Cd增加到8 mF时,系统表现出LFO 现象,其振荡频率为2.1 Hz。相似的变化趋势也适用于简化的模型计算结果,其对应的临界值和振荡频率同样在第4节表1、2中给出。
最后,将电流内环控制中的比例增益kip视为变量进行分析。当kip从1.6 减小到1.1 时,特征值的变化如附录A 图A3(d)所示。当kip大于1.3 时,系统保持稳定。当kip等于1.3时,最大特征值的实部穿过实轴,此时计算得到的振荡频率为2.2 Hz。
3 仿真和实验验证
3.1 仿真案例
仿真案例中参数设置见附录A 表A1。在不同的参数变化下PCC处的电压en、电网侧电流in和直流侧输出电压udc波形如图2 所示。由图可知:当Ls=2 mH,Ts=5×10-5s,Cd=4.5 mF 和kip=2 时,系统稳定;当Ls=4.3 mH 时,系统不稳定,出现了振荡频率为2.1 Hz 的LFO 现象;当Ts=2×10-4s 时,系统出现了LFO 现象,振荡频率为3 Hz;当Cd=8 mF 时,系统出现了振荡频率为2 Hz的LFO现象;当kip=1.4时,系统出现了振荡频率为2.3 Hz的LFO现象。
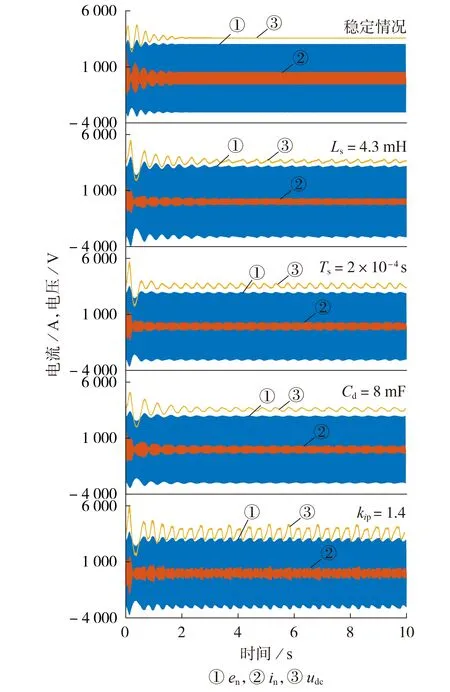
图2 仿真结果Fig.2 Simulative results
3.2 实验验证
采用远宽能源科技的半实物实验平台,对所建模型的准确性和分析方法的有效性进行进一步的验证,如附录A 图A4 所示。首先,将车网系统的模型拆分为被控对象(主电路)与控制算法两部分,利用StarSim 软件,将2 个部分分别下载到硬件在环HIL(Hardware In the Loop)实时仿真系统和快速原型控制RCP(Rapid Control Prototype)系统中,通过物理输入输出模块连接,形成闭环测试回路。
HIL 实时仿真系统(主电路)中的电路参数和RCP 系统(控制算法)中的控制器变量设置见附录A表A1。图3显示了在不同参数下观察到的en、in和udc的测量波形,各波形的局部放大图见附录A 图A5。由图可知:当与仿真设置相同的稳定参数时,HIL 的结果显示系统也是稳定的;当Ls增加到4.5 mH 时,系统的振荡频率为2 Hz;当Ts增加到2.2×10-4s 时,系统的振荡频率为3.4 Hz;当Cd扩展到8 mF时,系统的振荡频率为2 Hz;当kip减小到1.3 时,系统的振荡频率为2 Hz。综上,HIL 中展现出的LFO 现象与图2中的仿真结果及前文理论分析的结果基本一致。
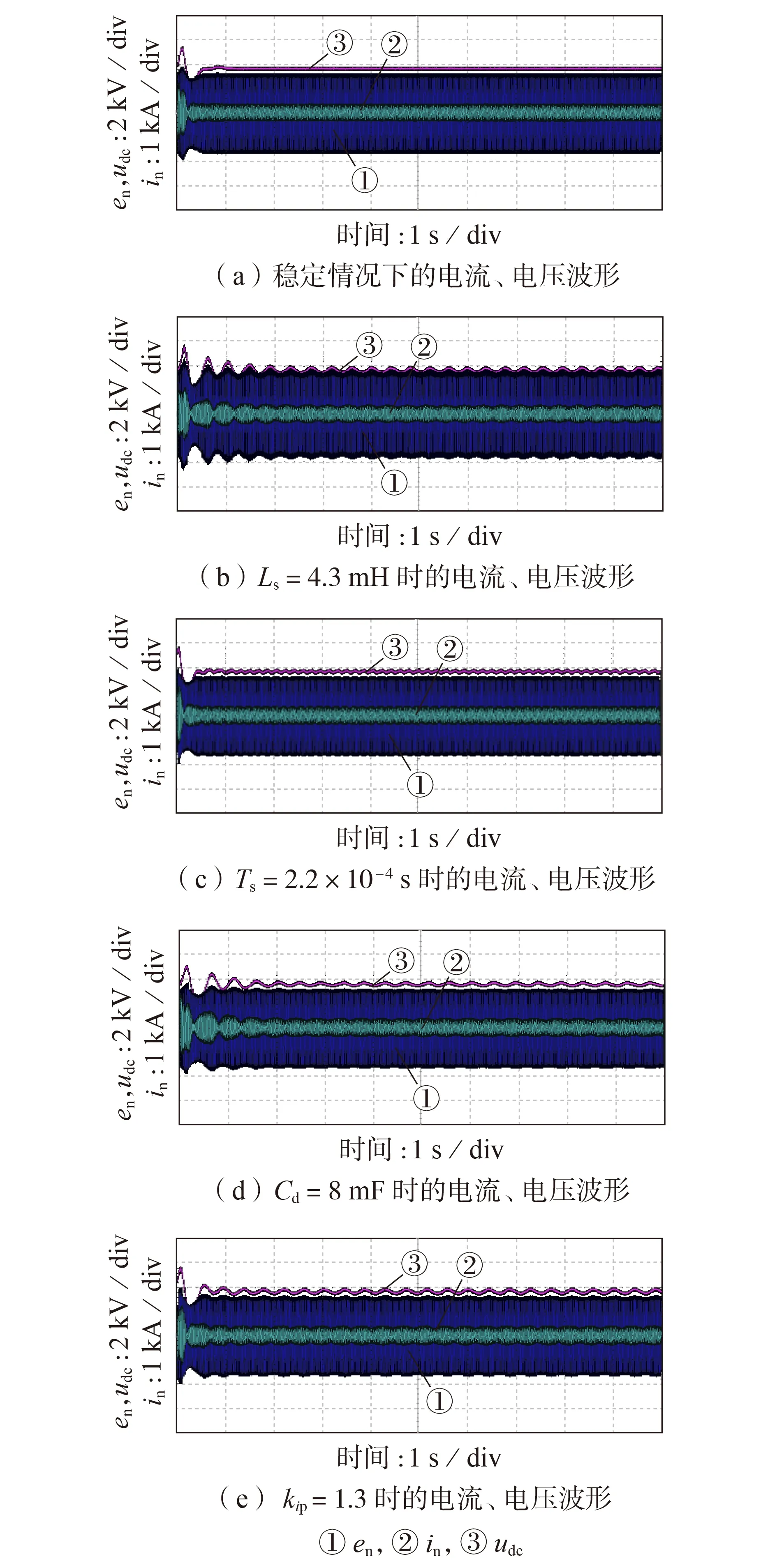
图3 半实物仿真结果Fig.3 Simulative results of HIL
为了更直观地比较,对比分析考虑了PLL角频率动态以及时间延迟的情况和未考虑以上2 种因素下模型计算的数值以及仿真和半实物结果。表1 为不同模型下系统发生振荡的临界参数值,表2 为临界参数下不同模型所计算的系统振荡频率。由表可知,Ls、Ts和Cd过高或电流内环控制中的比例增益kip过低会导致LFO现象的出现。通过对比本文计算结果与文献[19]模型的理论计算结果可知,未考虑PLL 角频率动态以及时间延迟的情况,即采用文献[19]中的模型计算得到的参数临界值和振荡频率与仿真测试、HIL 实验的结果都存在一定的误差,而将PLL 中角频率视为变量并且考虑了时间延迟后的本文所提建模方法得出的结果误差较小,更接近实验值。这表明基于特征值的稳定性分析方法是有效和正确的,并且本文所建立的数学模型更加准确。
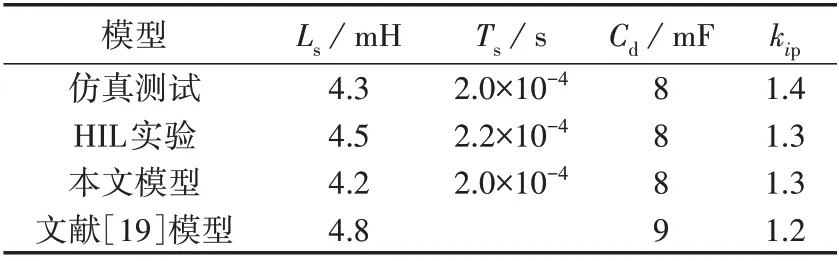
表1 参数临界值Table 1 Critical values of parameters

表2 临界参数下不同模型下的LFO频率Table 2 Frequency of LFO under critical values of parameters in different models
4 基于design-oriented的稳定边界分析
为了更直观地显示参数变化对稳定区域的影响,本节基于前文中建立的SSA 模型,将SSA 模型与design-oriented 分析方法相结合,以计算系统参数变化时所引起LFO的参数边界值。
从参数中选择参与讨论的变量,为与前文分析相关联,选择电网侧电感Ls、采样时间Ts、直流侧电容Cd和比例增益kip作为分析对象。首先从上述4个参数中选择3 个,以构成参数平面;再确定3 个参数中的1个变量暂时作为定值,1个作为自变量,另外1个参数作为因变量,利用特征值分析法计算出其稳定临界值,并记录下来。通过改变自变量参数值,分别求取对应的纵坐标参数临界值。最后通过最小二乘拟合,将记录的临界点绘制成稳定边界曲线,如图4 及附录A 图A6—A8 所示(图4 中,曲线上方为稳定区域,曲线下方为不稳定区域)。
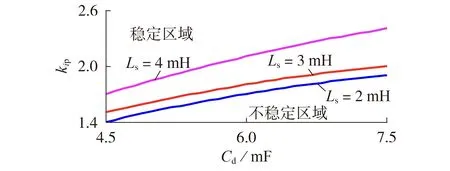
图4 不同Ls下当Ts=5×10-5 s时Cd-kip平面上的稳定边界Fig.4 Stability boundary on Cd-kip plane when Ts=5×10-5 s under different values of Ls
4.1 电网侧电感
Ls是影响系统稳定性的关键参数,同时选择负载侧电容Cd和电流内环比例系数kip作为另外2个参数进行对比,以形成参数平面。在Ls不同的情况下,研究了由该参数和参数平面上的其他2 个变量形成的稳定边界,结果如图4 所示。在给定Ls的前提下,较高的kip将使系统保持稳定。以图4 中Ls=2 mH 曲线为例,此时最小二乘拟合曲线的方程为:

另取Cd=5.5 mF 的情况对曲线的计算结果进行验证,此时输出结果为1.63,仿真测得的临界值为1.7,结果基本吻合,证明了曲线拟合结果的正确性。
4.2 采样时间
采样时间Ts的大小是影响系统稳定性的另一个参数。选择Cd和Ls作为参数平面的2 个坐标轴,并且稳定边界如附录A图A6所示。
4.3 直流侧电容
直流侧电容Cd同样影响稳定边界的位置,如附录A 图A7 所示。采样时间Ts和电流比例增益kip被选作另外2 个变量。由图可知,对于给定的Cd,选择较小的Ts和较大的kip更容易保持系统的稳定。
4.4 电流内环比例增益
当kip较小时,系统将更容易越过稳定边界;而kip越大,稳定性区域越大,即系统的稳定裕度越大,如附录A图A8所示。
图4 和附录A 图A6—A8 显示了所选参数增加时系统稳定裕度的变化情况。由图可知,在一定的参数变化范围内,选择较小的Ls、Ts、Cd以及较大的kip有利于保持系统的稳定性,得到更大的稳定裕度。
5 结论
本文建立了单相车网系统的时域SSA 模型。在建模过程中,将电源视为理想电压源,忽略了直流侧2倍工频纹波,考虑了PLL的角频率变化以及控制中的时间延迟。由于本文采用根轨迹来分析电路参数和控制参数对系统动态稳定性的影响,与传统的阻抗建模相比,在计算过程中无需在时域和频域之间进行转换,可以避免采用Nyquist曲线或Bode图所需的输入和输出阻抗的复杂计算。
与不考虑PLL 中角频率动态变化和时间延迟的模型计算结果进行对比,表明所建模型的理论计算结果与软件仿真和HIL 平台实验的结果更加吻合,证明所采用理论稳定性分析方法的有效性和准确性。采用design-oriented 分析方法对参数引起的稳定边界进行更直观的观察,为系统中电路和控制参数的选择及保持系统的稳定运行提供了参考依据。
附录见本刊网络版(http://www.epae.cn)。
猜你喜欢
数学物理学报(2021年6期)2021-12-21
数学物理学报(2021年5期)2021-11-19
数学物理学报(2021年3期)2021-07-19
科学家(2021年24期)2021-04-25
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
自动化学报(2019年12期)2020-01-19
电子制作(2017年19期)2017-02-02
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年4期)2016-04-04