基于功率耦合的双馈风机并网系统同步控制技术
2022-12-22 11:48张祥宇沈文奇黄弘扬马骏超陆承宇
电力自动化设备 2022年12期
张祥宇,沈文奇,黄弘扬,彭 琰,马骏超,陆承宇
(1. 华北电力大学 新能源电力系统国家重点实验室,河北 保定 071003;2. 国网浙江省电力有限公司电力科学研究院,浙江 杭州 310014)
0 引言
双馈风机DFIG(Doubly-Fed Induction Genera⁃tor)遵循最大功率点跟踪控制指令向电网输送功率,无法灵活响应系统频率变化及提供惯性支持,更不具备抑制功率振荡的能力[1]。当风电高比例接入电网后,大幅降低的惯量和阻尼将给系统稳定性带来风险。为获得友好并网特性,风电机组可通过虚拟同步控制模拟同步机的惯量、调频、阻尼、调压等多种运行特性,从而主动为电网提供动态稳定支撑[2⁃3]。
在虚拟同步控制中,虚拟惯量的引入使得变速风电机组可在较宽的转速范围内调节转子动能,模拟同步机的惯性响应[4⁃5]。然而,虚拟惯量作为可变参数引入电网必然会对系统的阻尼等特性产生影响,若设置不当有诱发功率振荡的风险。因此,目前关于虚拟惯量的自适应优化控制得到了广泛关注。文献[6]按转速振荡周期的4 个阶段配置虚拟惯量,降低了引入惯量导致功角振荡的风险,但未探讨虚拟惯量的取值范围。基于上述研究,文献[7⁃8]通过讨论传递函数的稳定特性,进一步分析了虚拟惯量的取值。然而,上述研究方案选取的并网系统中多为单台机组,忽略了互联机组间的功率传递关系,而未考虑功率耦合产生的动态交互时,参数自适应调节无法确保接入电网的安全性。显然,引入虚拟惯量的风电机组已与同步机形成同步运行状态,2 种发电机组间的功率调节必然存在相互影响,若忽略新的耦合运行关系,则在设置虚拟惯量参数时,附加控制仍会存在运行风险。
系统功率振荡过程与机组控制参数、并网点PCC(Point of Common Coupling)相对功角差、网络阻抗等密切相关[9]。采用虚拟同步并网方式的双馈风电并网系统,必然存在功角及转速耦合现象。文献[10⁃11]假设风机与同步机转速同步变化,分析了两机并网系统下,风机虚拟惯量控制作为附加控制引入后对系统阻尼的影响。然而,在风机遭受干扰发生功率振荡时,与并网同步发电机间的功率传递关系,决定了2 类机组的转速无法完全同步。文献[12⁃13]认为双馈风机与同步机的耦合关系将会影响系统阻尼,但尚未针对双馈风机与同步机之间的耦合关系设计控制器。综上,双馈风机的虚拟惯量仍须基于并网机组间的转速耦合关系进一步设计其调节范围,并通过优化控制,使风机适应同步并网系统的运行方式,才能规避运行风险,更具工程推广价值。
为提升同步并网风力发电系统的运行安全性,本文首先针对双馈风机,结合虚拟同步机控制结构,建立了双馈风机同步并网系统的小信号模型;然后,分析处于虚拟同步运行时的双馈风机与互联同步机之间的转速耦合关系,并引入耦合系数,从并网系统的稳定性层面进行分析,给出系统控制参数的合理取值范围,进而提出了基于功率耦合的双馈风机同步控制策略,并从能量角度验证了该控制策略的合理性;最后,通过搭建含双馈风机的同步并网仿真系统,验证所提控制方法的有效性。
1 风机同步并网系统模型
双馈风机同步并网发电系统的拓扑结构如图1所示。采用虚拟同步控制后,双馈风机在频率波动后将具有独立的功角,将其表示为δ2。同步发电机SG1和SG2的功角分别为δ1、δ3,其中SG2用于模拟无穷大母线,将其功角δ3设为0°,即系统的平衡节点。SG1和双馈风机分别经电抗x1和x2接入PCC,向电网送电。
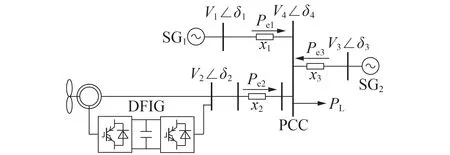
图1 双馈风机同步并网系统Fig.1 Synchronization grid-connected system with DFIG
风电机组的虚拟同步控制框图见图2,虚拟同步控制系统包括频率响应、阻尼控制、虚拟惯量控制、无功调节等环节。图中:ω1为SG1的转速;ωref为设定的参考转速;Pref和Qref分别为有功功率和无功功率给定值;Pe和Qe分别为风机有功功率和无功功率输出值;kf、kd和kq分别为调频系数、阻尼系数和无功调节系数;Hvsg为风机虚拟惯量系数。输入的转速偏差和无功功率偏差分别经过有功和无功控制环节得到输出电压的幅值V2和相位δ2参考值[14⁃15]。
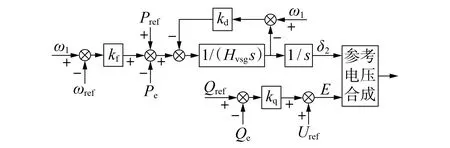
图2 双馈风机虚拟同步控制框图Fig.2 Virtual synchronous control block diagram of DFIG
根据图1,将SG1、双馈风机的功率响应分别表示为Pe1、Pe2,SG2恒定输出功率表示为Pe3,负荷所需功率表示为PL。双馈风机采用虚拟同步机控制技术后,可为电网提供虚拟惯性与阻尼支撑,且具有独立的功角,模拟同步发电机模型,可表示为:

式中:Pf为调频功率;Pd为阻尼功率;ω2为风力机的虚拟电转速。
SG1的调速器模型由比例积分PI(Proportional Integral)控制器实现,则发电机二阶转子运动方程可表示为[16⁃17]:

式中:HG为同步发电机的惯量系数;v为调速器的输出状态变量,且dv/dt=ωref-ω1;k1和k2分别为调速器的比例系数和积分系数。
采用虚拟同步机控制后,双馈风机输出的有功功率不再仅取决于风速,而是与同步发电机SG1的转速产生了电气耦合。根据并网系统的功率平衡关系,可得:

结合式(1)—(4),可得:

式中:Un为负荷接入端的端电压;z为负荷等值阻抗;SB为系统的基准功率。
由式(5)可知,系统状态方程与同步发电机转速和双馈风机的虚拟电转速有关,双馈风机与SG1之间存在耦合关系。
2 风机与同步机间的虚拟同步耦合关系
引入虚拟同步控制的风电机组将与同步机形成同步运行状态,2 种发电机组间的功率调节必然存在新的动态耦合运行关系,并与风机控制参数、并网同步机间相对功角差、网络阻抗等相关。结合图1,系统的节点导纳矩阵Y可表示为:
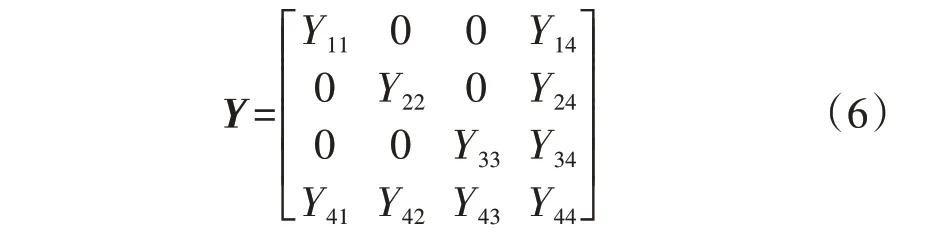
式中:Y11、Y22、Y33、Y44分别为SG1、双馈风机、SG2和PCC 的自导纳;Y14为节点1 和节点4 之间的互导纳,其他类似。
节点1—3的注入功率可表示为:

式中:Pi、Qi和Ui分别为节点i注入的有功、无功功率和端电压,其中i=1,2,3;αii和αij分别为节点i的自阻抗角和节点i、j间线路阻抗角,其中j=1,2,3,4;δij为节点i、j间机组功角;Yii和Yij分别为节点i的自导纳和节点i、j间互导纳。
考虑到线路阻抗较小,近似忽略线路中功率的损耗,根据功率平衡方程可得:

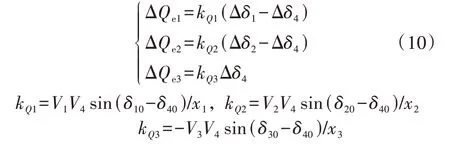
式中:ΔPe1—ΔPe3分别为SG1、双馈风机和SG2输出有功功率的增量,如式(9)所示;ΔQe1—ΔQe3分别为SG1、双馈风机和SG2输出无功功率的增量,如式(10)所示;ΔPL和ΔQL分别为负荷的有功和无功增量,本文采用恒阻抗负荷模型,增量可忽略。
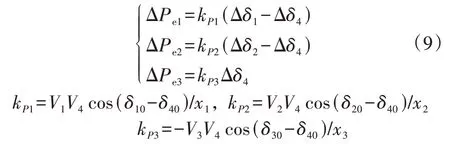
式中:Δδ1、Δδ2分别为SG1、双馈风机的功角增量;Δδ4为PCC电压相角增量;δ10—δ40为对应角度的初值。
小扰动分析采用了线性化处理方法,故式(8)所示的功率平衡方程仅计及了与有功变化更加密切的功角小扰动量,忽略了电压对功率变化的影响。由于线路、负荷的动态特性主要取决于电压变化,故在功率小扰动的平衡方程中未予以体现。
联立式(8)—(10),可得:

消元得到:

式中:k为双馈风机与SG1的耦合系数。
电网实际运行时,各节点的功角差值通常较小,则有:

将式(13)、(14)代入k的计算公式,可得:

根据转子运动方程,双馈风机和SG1转速之间也存在如下耦合关系:

式中:Δω1、Δω2分别为双馈风机和SG1转速增量。
对式(1)、(3)进行线性化,并将其与耦合系数代入功率平衡方程式(5)中,得到:

由式(17)可知,含风机的虚拟同步并网系统的等效惯量为HG+kHvsg,等效阻尼为kf+k1+kd-kdk,实现了从四阶至二阶模型的降阶,便于控制参数整定。在状态变量转化过程中,虽然状态变量δ1和δ2之间呈k倍关系,但由于系数k与U、δ、x相关,故2个状态变量并非呈线性关系。因此,在降阶后的系统等值模型中,4 个状态变量仍会表现出不同的动态特性,且具有耦合关系。其控制框图如附录A 图A1所示,惯量和阻尼大小均与耦合系数相关,须计及风机与同步机的耦合关系进行风机控制参数设计,进而满足风机与同步机共同并网运行的稳定性要求。
3 风机同步控制参数设计
根据式(17),含风机的虚拟同步并网系统输出功角的闭环控制框图可简化为如图3所示。

图3 系统输出功角的闭环控制框图Fig.3 Closed-loop control block diagram of output power angle of system
图3中,H和D表达式如下:

相应地,闭环传递函数为:

当系统状态方程的闭环传递函数的极点全部位于复平面的左半平面时,系统稳定运行。由劳斯判据对系统参数进行初步界定,系统稳定的充要条件为:

动态性能指标可衡量系统动态运行抗干扰性能,其中超调量σ反映了系统响应过程中的平稳度,计算公式如下:

由式(21)可知,阻尼比ζ影响超调量。在参数整定过程中,可以根据最优二阶系统理论,获得较快的响应速度和较小的超调量,通常认为阻尼比约为0.707。在工程设计中,当阻尼比ζ取值范围为0.4~0.8 时,σ介于1.5%~25.4%之间[18]。故本文将系统的阻尼比范围设计如下:

为保证频率波动时,系统有充足的惯量支撑,系统等效惯量应满足系统最小等效惯量Hmin的需求:即:
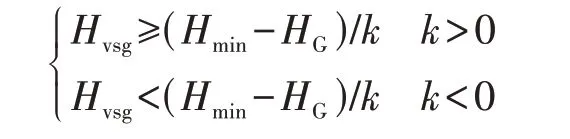

由于实际运行过程中,风机可虚拟出的惯量大小取决于当前风速大小、风机转速限制等自身特性,因此风机虚拟惯量大小还应满足:

则系统等效惯量存在最大值Hmax为:

式中:kmax为耦合系数的最大值。
根据式(20)—(25)可从系统稳定性层面对控制参数进行限制,如图4所示。

图4 系统等效控制参数范围Fig.4 Equivalent control parameter range of system
由式(22)可得到系统阻尼比关于风机虚拟惯量的灵敏度为:

式中:D、H和k2均大于0,则灵敏度的正负取决于耦合系数k的正负。
在系统实际运行过程中,风机与同步机的耦合关系将随各电气量的变化而变化,系统阻尼比存在超出限值的风险,此时可通过灵活调整虚拟惯量系数,保证风机与同步机的稳定运行。由式(26)可知:当阻尼不足且耦合系数k>0 时,维持阻尼比的稳定需要减小虚拟惯量系数;当阻尼不足且耦合系数k<0 时,需要取较大的虚拟惯量系数以保证阻尼比在合理范围内。
4 基于功率耦合的风机同步控制方案
本节提出基于功率耦合的风机同步控制方案,控制方案流程见附录A图A2,具体步骤如下。
步骤1:确定系统频率变化死区,当检测到系统频率超出死区时,投入风机同步控制。
步骤2:将功角、母线电压及线路电抗信息输入控制器,计算得到此时风机与同步机的耦合系数k。
步骤3:判断此时风机与同步机运行是否位于第3 节所提稳定区域中,若位于该区域内,则控制器不动作,返回步骤1,检测系统频率波动,等待控制器投入;否则,执行下一步骤。
步骤4:由式(26)所示灵敏度确定虚拟惯量优化方向,得到如式(27)所示的优化运算公式。

步骤5:判断此时优化得到的虚拟惯量系数是否超出上下限值,若超过则取限值,否则执行下一步骤。
步骤6:继续判断此时风机与同步机运行是否位于稳定区域中,若位于该区域内,则完成惯量优化,继续等待系统频率波动;否则,返回步骤2。
从能量角度对上述控制的合理性进行验证,忽略式(17)中的等效阻尼[19],着重讨论虚拟惯量系数对系统稳定性的影响,可得:
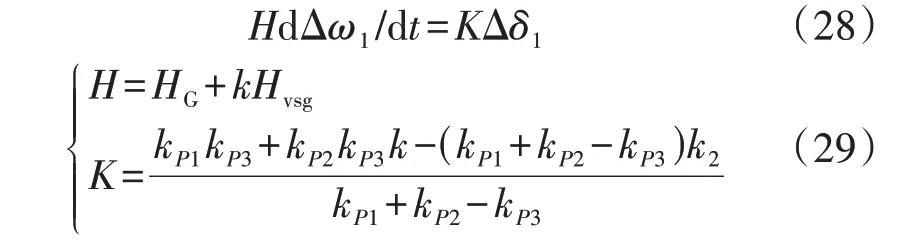
式(28)等号两边同乘Δω1,得到:

积分后得到系统的能量函数Et为:

式中:Ek为系统动能;Ep为系统位能。
根据李雅普诺夫稳定判据,若系统稳定运行,则能量函数Et应随时间单调递减,即:
由式(32)可知,若要满足系统稳定的能量要求,则风机的虚拟惯量需要与耦合系数进行协调控制。当k>0时,应减小风机虚拟惯量系数;当k<0时,应增大风机虚拟惯量系数,才能满足式(32)。因此,所提基于功率耦合的风机同步控制方案通过阻尼比和惯量支撑两方面进行约束,使系统始终处于预设稳定区域内,有利于提高系统动态稳定性。
5 时域仿真分析
5.1 系统简介
为验证风机虚拟惯量参数配置对并网系统运行稳定性的影响规律,本文在DIgSILENT PowerFac⁃tory15.1 软件中搭建如附录A 图A3 所示的双馈风机同步并网仿真系统。同步发电机SG1的额定功率为600 MW,双馈风机共计100 台,每台额定功率为2 MW。母线4 处接入有功负荷600 MW。各机组参数如附录A表A1—A3所示。
仿真过程设置如下3 种案例:Case 1,无附加控制;Case 2,恒定虚拟惯量控制;Case 3,基于功率耦合的风机同步控制。Case 3中除风机虚拟惯量外的其他同步控制参数如附录A 表A4所示[20],根据系统线路参数、端电压以及两机的功角获取耦合系数的极限变化范围,并考虑风机提供的理想阻尼比。本文的耦合系数和阻尼比范围分别为[-2,1.2]和[0.4,0.8]。由式(23)—(25),得到等效惯量系数的极限值Hmin和Hmax。
5.2 三相短路故障时域验证
在同步发电机SG1双回联络线中的一条线路中点处,设置持续时间为0.1 s 的三相短路故障。风速保持在8 m/s。3 种案例下,系统频率f、风机输出有功功率Pe2以及SG1电磁功率Pe1的动态响应曲线如图5所示。
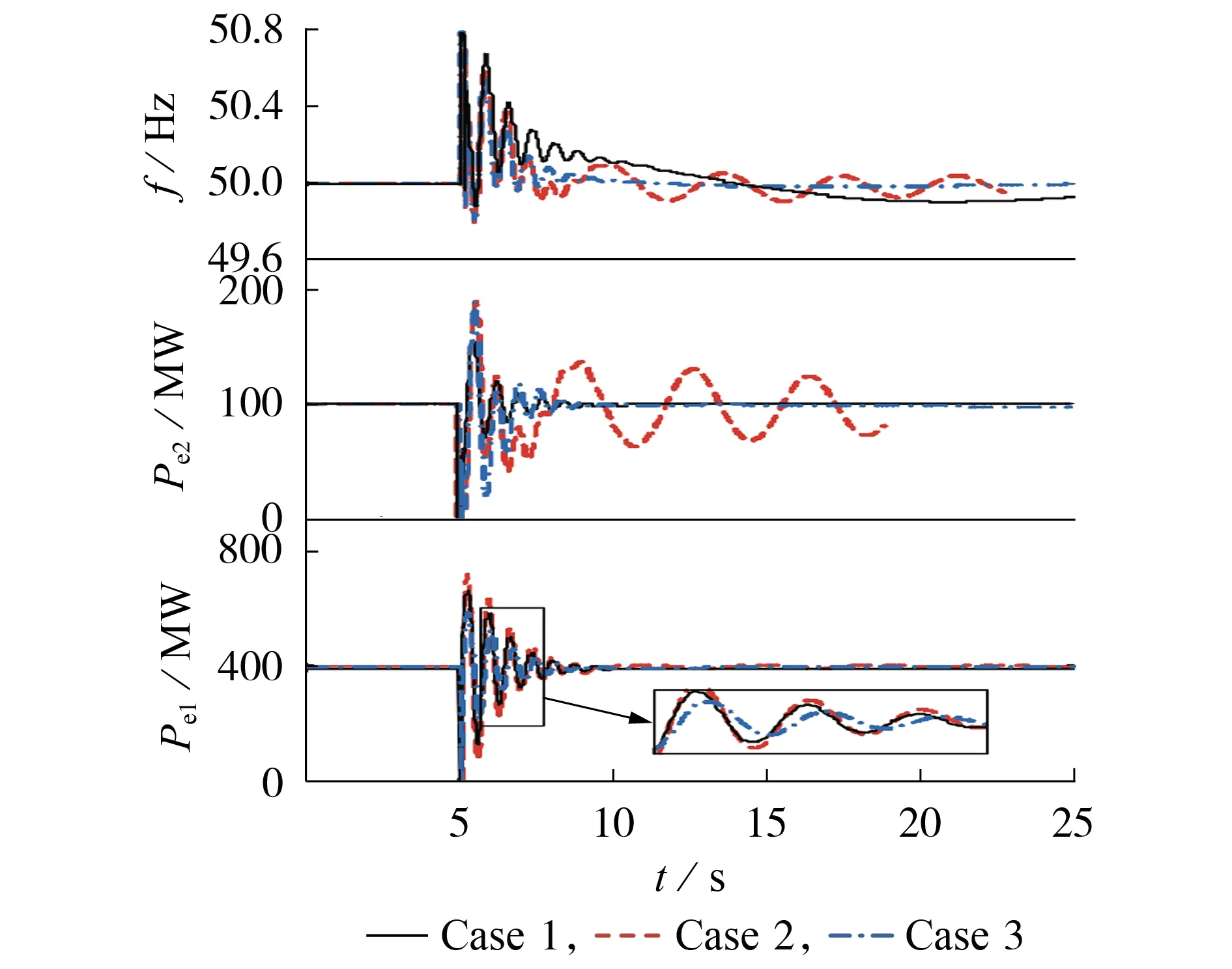
图5 发生三相短路时不同案例下的系统响应曲线Fig.5 System response curves under different cases in case of three-phase short circuit fault
由图5(a)可知,系统故障引起了系统频率发生大幅度波动。在Case 2 中,采用虚拟同步控制后的风机将根据频率变化调节输出功率,但由于系统运行工况剧烈变化,导致风机与同步机间的耦合系数变化较大,采用恒定惯量已无法为系统稳定提供支撑。由图5(b)和5(c)可以看出,引入虚拟同步控制后,双馈风机和SG1的输出功率、系统频率均振荡得更加剧烈。Case 3 在考虑耦合系数后,风电机组可根据系统运行状态实时调整虚拟惯量,大幅改善了系统的动态特性,系统稳定的恢复时长分别由Case 1的6.93 s和Case 2的17.51 s减少至2.61 s。
附录A 表A5 列出了各元件的电抗标幺值。基于功率耦合的风机同步控制器输入参数响应曲线如图6 所示,图中U1、U2均为标幺值。可见引入基于功率耦合的风机同步控制后,在综合线路参数及节点母线电压的基础上可得到耦合系数的大小,由此进行惯量参数调节。
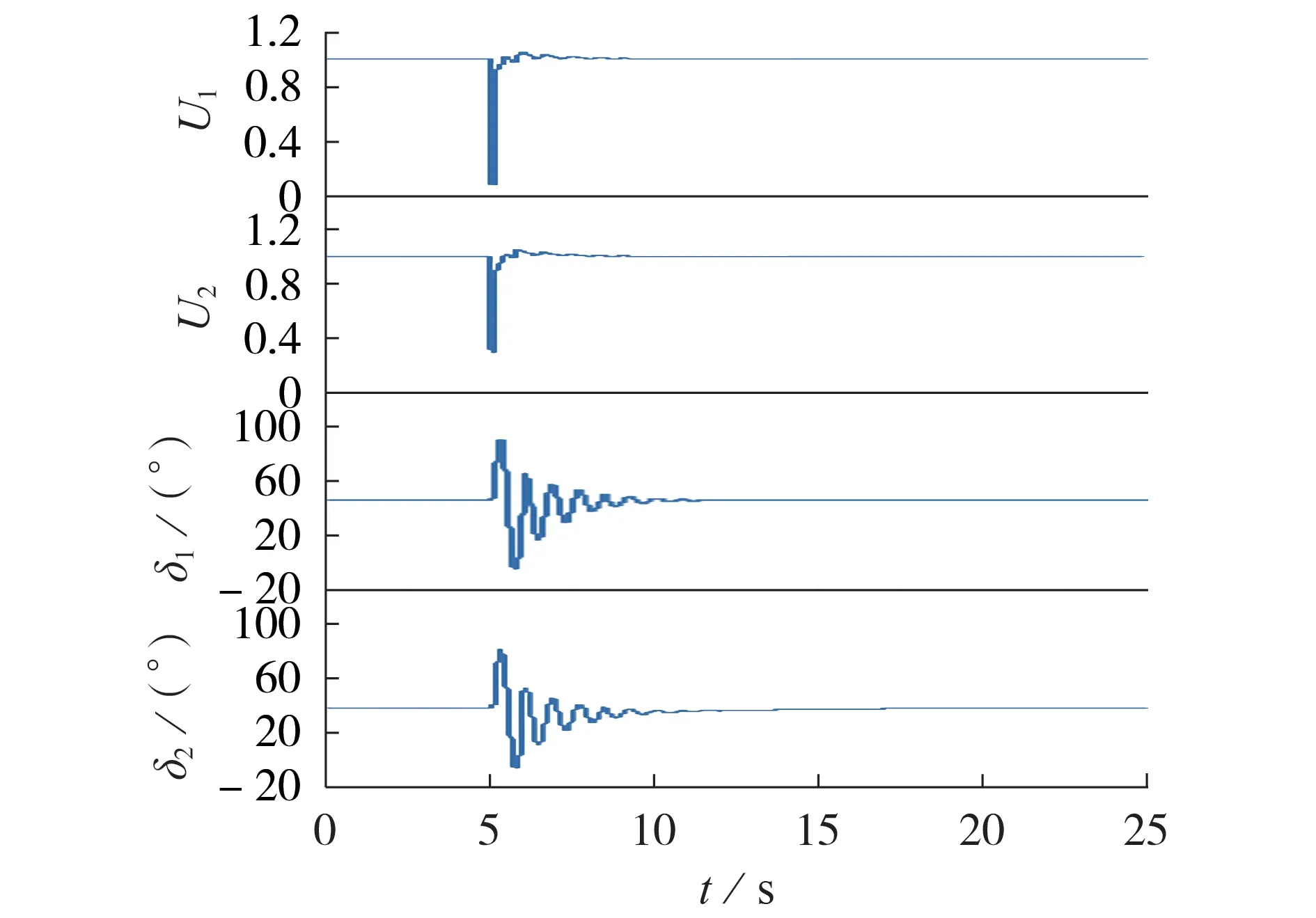
图6 基于功率耦合的风机同步控制器输入参数响应曲线Fig.6 Input parameter response curves of synchronous controller for wind turbine based on power coupling
对比图5中f、Pe2、Pe1的动态响应可以看出,无附加控制方案下,系统发生故障导致风机功率波动,此时阻尼系统功率振荡主要依赖于同步发电机SG1。与Case 1 相比,在Case 3 中,系统阻尼比的设置范围与Case 1 相比变化不大,故功率振荡削弱程度仅略有改善。然而,与Case 2 相比,所提控制方法避免了附加虚拟惯量加剧系统功率振荡的风险。此外,结合3 个案例测试结果可以看出,在Case 3 中,风机通过承担部分振荡能量,不仅加快了振荡衰减速度,而且减小了频率变化幅度,系统获得了最优的动态稳定性。因此,本文所提控制显著降低了风机并网主动支撑的附加控制运行风险,提高了虚拟同步运行的可靠性。
5.3 负荷突变时域验证
在仿真时间t=5 s 时,系统发生单相短路故障后,负荷突增10%,造成系统有功出现缺额,频率跌落超出安全波动范围。同样地,设置上述3 种控制方案,不同控制方案下的系统频率f、风机输出有功功率Pe2以及SG1电磁功率Pe1的动态响应曲线如附录A 图A4 所示。负荷突变时风机同步控制器输入参数响应曲线如附录A图A5所示。
由图A4 可知,Case 1 中,风机不具备惯性响应能力,无法为系统提供瞬时的功率支撑,单相短路故障伴随负荷突增事件后,系统频率出现大幅跌落,故障切除后,依靠SG1的频率支持能力,系统可满足负荷需求,并恢复稳定运行状态。Case 2中,双馈风机采用恒定惯量控制,这样尽管改善了初始阶段频率的跌落幅值,但风机不随系统运行状态变化而进行参数调整,故而影响了频率恢复性能。恒定惯量控制一方面仍具有超调量,增加了频率恢复稳定所需时间,另一方面在稳态恢复过程中,恶化了系统衰减特性,诱发了系统功率波动,进而削弱了频率稳定性。Case 3 中,基于功率耦合的风机同步控制将在系统频率变化后,主动调整惯量参数大小,该场景下系统阻尼特性不仅得到了提高,而且可兼顾系统频率稳定性。
不同控制方案下各电气量振荡幅度如表1 所示。表中:Δfmax、ΔPe2,max、ΔPe1,max分别为系统频率、风机输出有功功率和SG1电磁功率的最大偏移量;Δt为频率恢复稳定所需时间。由3 种方案下各电气量的响应特性可知,在所提基于功率耦合的风机同步控制下,双馈风机同步并网时,既可以降低频率跌落幅值,又可加速其恢复过程,具备理想的频率支撑功能。不仅如此,在设定范围内进行惯量参数调节,还可改善系统的衰减特性,缩短功率振荡时长,相比恒定惯量控制具有明显的优势。

表1 不同控制方案下各电气量振荡幅度Table 1 Oscillation amplitude of each electrical quantity under different control schemes
从5.2 节仿真案例可以看出,在所提控制策略下,系统功率振荡的衰减速度与恒定惯量控制相比改善效果明显,与无附加控制相比,风机响应系统功率振荡可分担部分振荡能量,不再因附加惯量加剧振荡,且具有改善阻尼的作用。不仅如此,在功率振荡期间,系统频率的变化幅度有所减小。进一步结合5.3节负荷突变的仿真案例可以看出,若无附加控制,则频率出现了较大的跌幅,系统存在频率支持能力欠缺的问题,而所提控制策略则兼顾了频率与功率振荡2 个控制目标。因此,所提控制策略通过结合风机与同步机之间的功率耦合关系,将系统的阻尼特性限制了在预设范围内,更好地规避了附加控制在局限于解决单一稳定问题时所带来的运行风险,有利于控制技术的推广应用。
6 结论
本文针对双馈风机同步并网系统,分析了风机与同步发电机之间的功率耦合关系,考虑耦合系数,提出了风机的惯量参数调节范围及控制方法。通过对所提控制策略的理论分析和仿真验证,得到如下结论。
1)系统遭受扰动后,虚拟同步并网的双馈风机因与同步发电机之间存在功率耦合,导致其转速或功角并非同步变化。若忽略机组耦合,则在同步运行方式下,将风机的虚拟惯量和阻尼与同步发电机叠加,进而设计控制器参数,必然会使虚拟同步机并网存在运行风险。
2)风机同步并网时,须考虑机组间的耦合关系,虚拟同步并网控制系统中的虚拟惯量、阻尼控制环节均须计入耦合系数。因此,虚拟同步风机并网系统应综合考虑惯量、阻尼及功率耦合关系,使其运行于预设的稳定区域内。
3)风机与同步机间的耦合关系显著影响风机同步控制参数设计。在功率动态交互过程中,虚拟惯量将改变系统衰减特性。风机应根据机组间的耦合关系,动态调节虚拟惯量使其在提供充足惯量支撑的前提下,改善系统阻尼比,保障系统运行于稳定区域,使风机兼具改善系统频率及功率振荡的并网支撑性能。
附录见本刊网络版(http://www.epae.cn)。
猜你喜欢
大电机技术(2022年3期)2022-08-06
湖南电力(2022年3期)2022-07-07
现代电力(2022年2期)2022-05-23
大电机技术(2022年1期)2022-03-16
防爆电机(2021年6期)2022-01-17
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
中国惯性技术学报(2018年1期)2018-05-10
制造技术与机床(2017年2期)2017-05-04
中北大学学报(自然科学版)(2015年6期)2015-12-02