考虑多任务剖面及其非工作故障延续性的直流断路器可靠性模型
2022-12-22 11:49杨墨缘欧阳森王凤学王天霖
电力自动化设备 2022年12期
杨墨缘,欧阳森,张 真,王凤学,王天霖
(1. 华南理工大学 电力学院,广东 广州 510640;2. 广东电网有限责任公司电网规划研究中心,广东 广州 510030)
0 引言
直流断路器DCCB(Direct Current Circuit Breaker)是实现直流配电网故障快速隔离的核心设备,其可靠性对整个直流配电网的安全可靠运行具有重要意义。不同于交流系统,直流系统由于不存在自然过零点,DCCB 需在传统交流断路器的基础上引入转移支路,吸能支路等一、二次设备来创造过零点,进而实现短路电流开断,这使DCCB 的拓扑结构和运行方式都变得更加复杂;另外,电力电子装备中功率器件最为脆弱,其次为电容器,二者薄弱程度远超过其他组件[1],DCCB 中转移支路的引入使其包含的功率器件和电容器骤增,DCCB 可靠性面临更加严峻的问题。
目前围绕DCCB 的研究侧重于结构设计[2⁃4]、仿真试验[4⁃5]、控制保护策略[6⁃7]等方面,关于DCCB 可靠性的研究较少。文献[8]初步基于相似产品法对DCCB 进行可靠性建模分析,认为DCCB 可靠性是影响直流配电网可靠性的主要因素。文献[9]研究了故障模式对DCCB 可靠性的影响,认为故障模式区分主要对配置较少DCCB 的直流配电网可靠性评估产生影响。文献[10]基于可靠性框图法对DCCB 进行可靠性建模,并基于此对直流配电网可靠性进行评估。文献[11]基于故障树分析法及马尔可夫模型对机械式、混合式和全固态式DCCB 可靠性进行对比分析,认为提高DCCB 可靠性的关键在于合理设计。上述关于DCCB 可靠性建模的研究主要从拓扑结构对比分析[11]、故障模式影响[9]、建模分析方法[8,10⁃11]等方面展开,然而在建模过程中均未全面考虑DCCB不同任务剖面下的可靠性,更未考虑非工作故障在任务剖面间的延续性对DCCB可靠性的影响。
目前围绕多任务剖面的可靠性建模研究主要集中在航空航天[12]和军事领域[13],在电力行业中的分析研究较少。文献[14]以风电场接入模块化多电平换流器MMC(Modular Multilevel Converter)逆变系统为例,提出一种考虑不同任务剖面的MMC 系统可靠性评估方法。文献[15]以光伏的年实际运行光强及温度的处理值为任务剖面,提出一种考虑实际工况与环境因素的光伏逆变器综合寿命预测方法。上述研究主要从新能源随机性角度对任务剖面进行划分,围绕换流器可靠性展开,但均未涉及关于DCCB的讨论,也未考虑非工作故障延续性的影响。DCCB是一个具有多个任务剖面的多阶段任务系统PMS(Phased-Mission System)。DCCB 可靠性是指DCCB在规定的条件下以及规定的时间内,完成规定功能的能力。其中:规定的条件包括DCCB 不同任务剖面下的工作条件和环境条件;规定的时间包括DCCB不同任务剖面下的运行时间,涉及年度级、小时级和毫秒级多个时间尺度;规定的功能包括合闸状态下的承载正常工作电流,分闸状态下的截断故障电流,以及分、合闸过程对分、合闸状态的切换功能。而现有关于DCCB 可靠性建模的研究并未对DCCB 所涉及的主要任务剖面(分、合闸状态及分、合闸过程)进行全面考虑,现有模型主要关注DCCB 基本可靠性模型[8⁃11],即所有组件串联而成的串联模型,该模型下认为任意组件故障均会导致整个DCCB的故障。
实际上,一方面DCCB 各组件并非在任意任务剖面均参与工作,且同一组件在不同任务剖面下的工作条件、环境条件、工作时间等也存在较大差异,所有组件均参与工作的情况通常仅出现在毫秒级时间尺度上;另一方面不同任务剖面下未参与工作的组件在其非工作条件、环境条件下发生非工作故障时,该非工作故障虽不会对当下任务剖面可靠性造成影响,但其可能延续到该组件参与工作的任务剖面,进而造成工作故障。可见,对DCCB 进行可靠性建模时区分不同任务剖面并考虑非工作故障在任务剖面间的延续性具有重要实际意义。
据此,本文提出一种考虑多任务剖面及其非工作故障延续性的DCCB 可靠性模型。基于系统可靠性模型理论建立了DCCB 各组件可靠性模型;基于故障影响分析及可靠性预计法建立了考虑非工作故障的DCCB 各任务剖面可靠性模型;基于此,建立将各任务剖面进行有效联系并考虑非工作故障延续性的DCCB马尔可夫模型,以求解DCCB不同任务剖面可靠性及其综合可靠性。算例分析对比了本文模型、传统模型及其余2种模型的DCCB可靠性计算情况,分析了关键组件冗余度对DCCB 可靠性的影响,结果验证了所提模型的合理性。
1 DCCB拓扑结构及工作原理
1.1 DCCB拓扑结构
通过DCCB 进行故障隔离的“2-1”结构直流配电网接线模式如图1所示,图中DCT 为直流变压器。DCCB 由载流支路、转移支路和吸能支路共同构成,并通过三者间的相互配合实现保护区的故障隔离,如附录A图A1所示。DCCB 中的载流支路用于承载正常工作电流;转移支路用于承载并切断故障电流;吸能支路用于吸收故障线路中储存的能量,并限制DCCB 断口间过电压。工程中根据DCCB 中关键开关组件的不同,可将其分为机械式、全固态式、混合式3类,如附录A表A1所示。
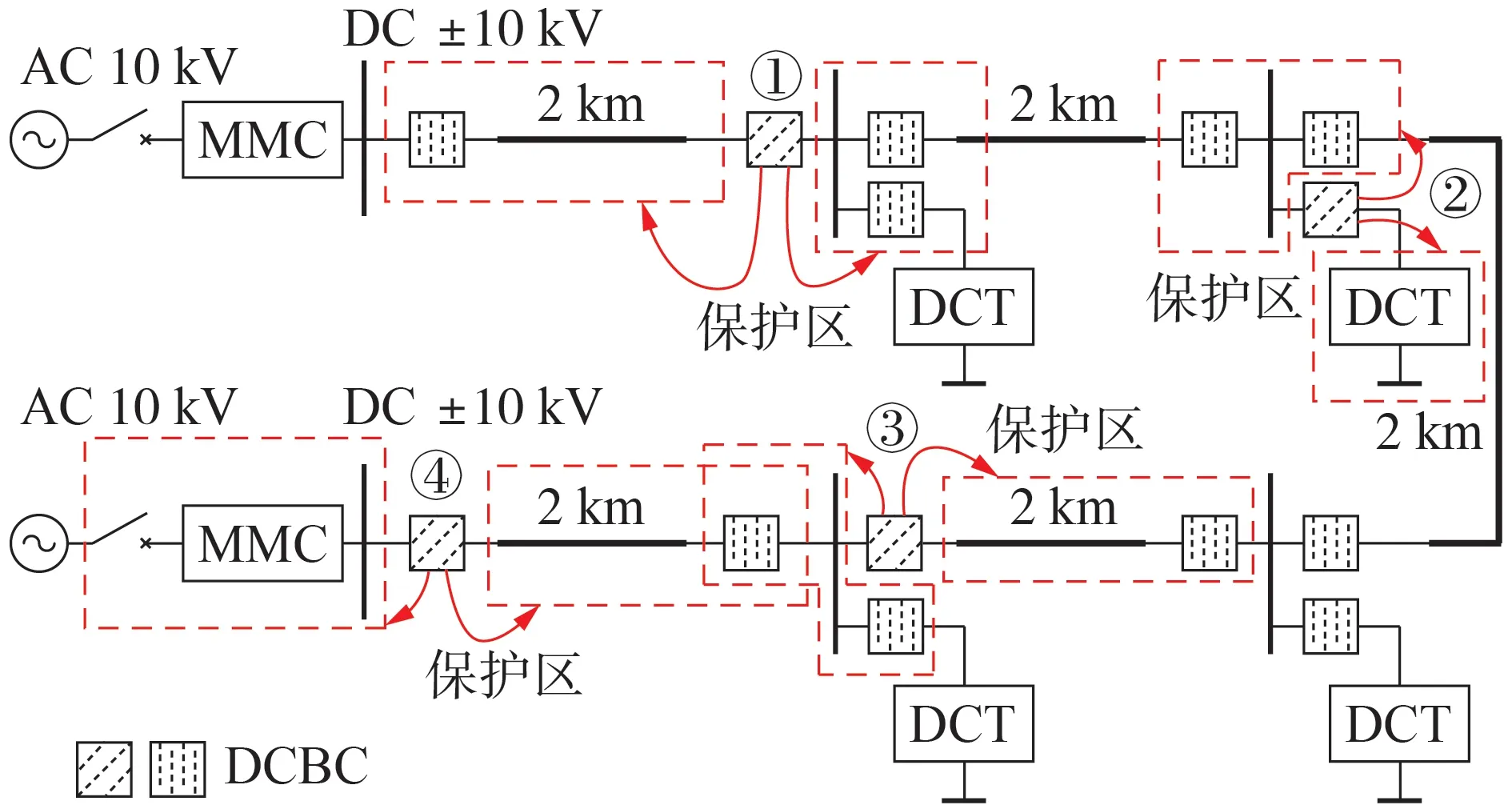
图1 DCCB接入直流配电网示意图Fig.1 Schematic diagram of DC distribution network incorporating DCCB
混合式DCCB 结合了全固态式和机械式的技术经济综合优势,是当前DCCB 研究的主要方向。混合式DCCB 具有多种拓扑结构,根据其换流方式的不同,可将其分为自然换流型、电阻过零型和电压过零型[16]。其中,相较于自然换流型受限于机械开关的弧压,电阻过零型需在载流支路中串入辅助开关,基于耦合负压电路CNV(Coupled Negative Voltage)的电压过零型结构通过调整CNV 的参数,可以克服不同电压等级下电力电子开关的导通压降,保证故障电流的快速可靠转移,且其载流支路无辅助开关,具有通态损耗几乎为0、无需水冷装置散热、装置成本较低等优势[17]。故下文主要以基于CNV 的电压过零型混合式DCCB(简称为耦合负压型DCCB)为例展开进一步研究,基于示范工程的耦合负压型DCCB拓扑结构如附录A图A2所示[4]。
1.2 DCCB工作原理
DCCB 主要具有运行、试验、检修3种模式,考虑到运行模式为DCCB 发挥其规定的保护功能的主要模式,下文主要围绕运行模式展开研究。DCCB 运行模式下具有合闸状态、分闸状态这2 种稳态运行状态,以及稳态运行状态间进行转换的分闸过程、合闸过程这2 种暂态运行状态,以附录A 图A2 所示耦合负压型DCCB 拓扑结构为例,其不同暂、稳态运行状态工作原理如下。
1)合闸状态。载流支路中快速机械开关FMS(Fast Mechanical Switch)承载直流稳态电流,转移支路和吸能支路均处于待命状态(其中电力电子开关PEB(Power Electronic Breaker)和可控硅整流器SCR(Silicon Controlled Rectifier)均处于关断状态,电容C2预充一定电压)。若DCCB 保护区故障,则进入分闸过程。
2)分闸过程。DCCB 收到故障分闸指令后,FMS关断,PEB 导通,当FMS 开距达到设计要求时,导通CNV中SCR以产生负压使FMS电流过零熄弧,完成故障电流向转移支路的转移;当FMS 开距能承受相应瞬态恢复电压时,PEB 关断,完成故障电流向吸能支路的转移,金属氧化物避雷器MOV(Metal Oxidized Varistor)耗散剩余能量,分闸成功,进入分闸状态。
3)分闸状态。载流支路中FMS 阻断故障直流电流,转移支路和吸能支路均处于待命状态(其中PEB 和SCR 均处于关断状态,C2预充一定电压)。若DCCB保护区故障修复,则进入合闸过程。
4)合闸过程。首先导通PEB,若DCCB 保护区无故障,则合FMS,断PEB,由FMS 导通直流稳态电流,合闸成功,进入合闸状态;否则,关断PEB,合闸失败,进入分闸状态。
2 DCCB 任务剖面划分及非工作故障延续性分析
2.1 DCCB任务剖面划分
由1.2 节DCCB 工作原理可知,DCCB 在运行模式下实则是一个PMS,即一个包含多个时间连续、过程不重叠的阶段任务的复杂系统。其中每个阶段任务为可靠性分析中的一个任务剖面,相应针对不同阶段任务可分别建立其任务可靠性模型。根据保护区状态不同导致的DCCB 发挥功能的不同,可以将DCCB 的任务过程划分为合闸状态、分闸过程、分闸状态及合闸过程4 个阶段任务,其对应MP1—MP4这4个任务剖面,如附录A图A3所示。
2.2 非工作故障延续性分析
以一个由A、B、C 3 个组件组成的简单PMS 为例进行分析,不考虑非工作故障延续性时,其可靠性框图如图2所示,可知其具有2个任务剖面。

图2 不考虑非工作故障延续性的PMS可靠性框图Fig.2 Block diagram of PMS reliability without considering non-operating fault continuity
不考虑非工作故障延续性时,任务剖面1、2 的可靠度函数RP1(t)、RP2(t)的表达式为:

式中:RA(t)、RB(t)、RC(t)分别为组件A、B、C 的可靠度函数。由于不同任务剖面下参与工作的组件不同,各任务剖面的可靠度函数存在差异。
式(1)是在基于各任务剖面中非工作组件完全可靠,且工作组件在不同任务剖面下可靠性相同的假设下得到的。然而,实际运行中非工作组件在待命状态下仍会受到非工作质量系数、环境系数、温度系数、电应力系数等的影响而具有故障风险[18]。非工作组件的故障虽不会对当前任务剖面可靠性产生影响,但当该组件在下一任务剖面为工作组件时,则该非工作故障将延续至下一任务剖面而直接导致工作故障的发生。考虑非工作故障延续性的简单PMS可靠性框图如图3所示。
根据图3,考虑非工作故障延续性时,任务剖面1、2的可靠度函数R'P1(t)、R'P2(t)的表达式[19]为:


图3 考虑非工作故障延续性的PMS可靠性框图Fig.3 Block diagram of PMS reliability considering non-operating fault continuity
式中:RA1(t)、RB1(t)、RC1(t)分别为组件A、B、C 在任务剖面1的可靠度函数;RA2(t)、RB2(t)、RC2(t)分别为组件A、B、C在任务剖面2的可靠度函数。
相比式(1)的理想情况,式(2)计及了组件在不同任务剖面的不同可靠性,并考虑了非工作组件的故障延续性,其更具实际意义。本文中任务剖面的非工作组件的故障即为该任务剖面的非工作故障。
根据上述分析,本文对非工作组件的故障延续性进行定义,即:某一任务剖面下的非工作故障(非工作组件的故障)虽对当下任务剖面可靠性不产生影响,但若不能及时发现并修复,则可能会延续到之后的任务剖面演变为之后任务剖面的工作故障(工作组件的故障),对之后任务剖面可靠性产生影响。这种由于先前任务剖面的非工作故障造成之后任务剖面的工作故障的现象称为非工作组件的故障延续性。
3 考虑非工作故障的DCCB各任务剖面可靠性建模
本节以附录A 图A2 所示耦合负压型DCCB 为例建立考虑非工作故障的DCCB 各任务剖面可靠性模型。
3.1 DCCB组件可靠性建模
1)载流支路。
载流支路主要由FMS 组成,FMS 包括电磁斥力机构和FMS 控制驱动模块。其中电磁斥力机构通过其分合闸保持机构确保FMS 分合闸状态,FMS 控制驱动模块通过接受DCCB 控制子机下发的报文控制驱动电磁斥力机构的分合闸过程。载流支路可靠度函数RCP(t)的表达式为:

式中:RB(t)、RSCU(t)分别为电磁斥力机构和FMS 控制驱动模块的可靠度函数。
2)转移支路及吸能支路。
转移支路由PEB和CNV组成。其中PEB由n个二极管桥子模块(SM1—SMn)组成,二极管桥子模块的可靠性主要由二极管、注入增强栅晶体管IEGT(Injection Enhanced Gate Transistor)、电容、子模块控制驱动模块共同决定;CNV 可靠性主要由空心变压器ACT(Air-Core Transformer)、电容、SCR、CNV控制驱动模块共同决定。上述任意元件故障,转移支路均会故障,转移支路可靠度函数RTP(t)表达式为:

式中:RPEB(t)、RCNV(t)分别为PEB、CNV 可靠度函数。当PEB 考虑k/n(G)工作冗余时,n个二极管桥子模块构成PEB,其可靠度函数RPEB(t)表达式为:

式中:RSM(t)为二极管桥子模块可靠度函数,其表达式如式(6)所示。

式 中:RIEGT(t)、RD(t)、RC(t)、RCH(t)、RICU(t) 分 别 为IEGT、二极管、电容、电容充电机、子模块控制驱动模块可靠度函数。
CNV可靠度函数RCNV(t)的表达式为:

式中:RACT(t)、RSCR(t)、RNCU(t)分别为ACT、SCR、CNV控制驱动模块可靠度。
吸能支路主要由MOV 组成,则吸能支路可靠度函数RAP(t)表达式为:

式中:RM(t)为MOV可靠度函数。
3)控制保护系统及供能系统。
控制保护系统除包括载流支路中FMS 控制驱动模块、转移支路中子模块控制驱动模块及CNV 控制驱动模块外,还包括由DCCB 控制主机、控制子机构成的装置级控制保护系统,其可靠度函数RGS(t)表达式为:

式中:RDBC(t)、RFEU(t)分别为DCCB 控制主机、DCCB控制子机可靠度函数。
供能系统主要考虑为控制保护系统直接供能的电源驱动模块,其可靠度函数为RPD(t)。
由于装置级控制保护系统和电源驱动模块的重要性,通常为其配置1/2(G)工作冗余。利用式(5)可计算得到考虑冗余后的二者可靠度函数R∗GS(t)、(t)。
根据上述各组件可靠度,通过式(10)可求解各组件平均无故障工作时间TMTTFa,进而通过式(11)求解各组件故障率λa。
式中:Ra(t)为组件a的可靠度函数。
3.2 考虑非工作故障的DCCB组件故障影响分析
在2.2节的基础上,将确定任务剖面下的故障分为工作故障和非工作故障,其中工作故障指无法实现该任务剖面规定功能的故障,非工作故障指不影响实现该任务剖面规定功能的故障。考虑到直流配电设备故障主要由组件失效导致,而在直流配电设备组件中功率器件最为脆弱,其次为电容器,二者薄弱程度远超过其他组件,而二者失效主要为应力导致的开路故障[1]。为有效说明非工作故障的特点,降低问题复杂度,本文认为DCCB 中各组件故障均为应力导致的开路故障。
根据2.1 节DCCB 任务剖面的划分,合闸状态、分闸过程、分闸状态和合闸过程分别对应4 个任务剖面MP1—MP4。由1.2 节DCCB 工作原理可知,不同任务剖面下DCCB 中任意组件故障并非均会对该任务剖面规定功能的实现产生影响。如合闸状态下,载流支路承载正常工作电流,转移支路和吸能支路处于待命状态。此时转移支路和吸能支路故障将不会影响DCCB 处于合闸状态下对承载正常工作电流这一规定功能的实现。故在合闸状态这个任务剖面下,载流支路的故障为工作故障,转移支路和吸能支路的故障为非工作故障。同理可得MP1—MP4下DCCB组件的故障影响情况,如附录A图A4所示。
3.3 考虑非工作故障的DCCB 各任务剖面可靠性建模
DCCB 不同任务剖面下各组件故障情况受到工作状态、温度、电应力、环境应力、质量等级等因素的影响。本节将在3.2节的基础上,区分工作故障和非工作故障,考虑影响组件故障的主要因素,对DCCB各任务剖面进行可靠性建模。
认为DCCB 中各元件处于寿命周期的偶发故障期,可靠度函数服从指数分布。在确定任务剖面下,应分别从元件的工作故障率和非工作故障率入手,进而基于3.1 节DCCB 组件可靠性模型对该任务剖面进行区分工作故障和非工作故障的可靠性建模。其中,元件工作故障率主要受工作温度、工作电应力、工作环境、元件质量等级等影响[20],如式(12)所示;元件非工作故障率主要受非工作温度、环境、元件质量等级等影响[18],如式(13)所示。且不同类型元件其工作、非工作故障率的主要影响因素也存在差异,因此实际建模中应分别对各元件进行具体分析。

式中:λP、λb分别为元件的工作故障率和基本故障率;πT、πS、πE、πQ、πO分别为元件的温度系数、电应力系数、环境系数、质量系数和其他影响系数。其中各系数的具体获取可参考国家军用标准[20]。

式中:λNP、λNb分别为元件的非工作故障率和非工作基本故障率;πNT、πNE、πNQ、πNO分别为元件的非工作温度系数、非工作环境系数、非工作质量系数和其他非工作影响系数。其中各系数的具体获取可参考国家军用标准[18]。
根据3.2 节分析,MP1下工作故障主要包括载流支路故障和控制保护系统误动故障,非工作故障主要包括转移支路故障、吸能支路故障和电源驱动模块故障。由于各元件寿命服从指数分布,根据各组件在MP1下参与工作情况,将式(12)、(13)求得的元件工作、非工作故障率分别代入式(3)—(11),可分别得到MP1下的工作故障率和非工作故障率,如式(14)、(15)所示。
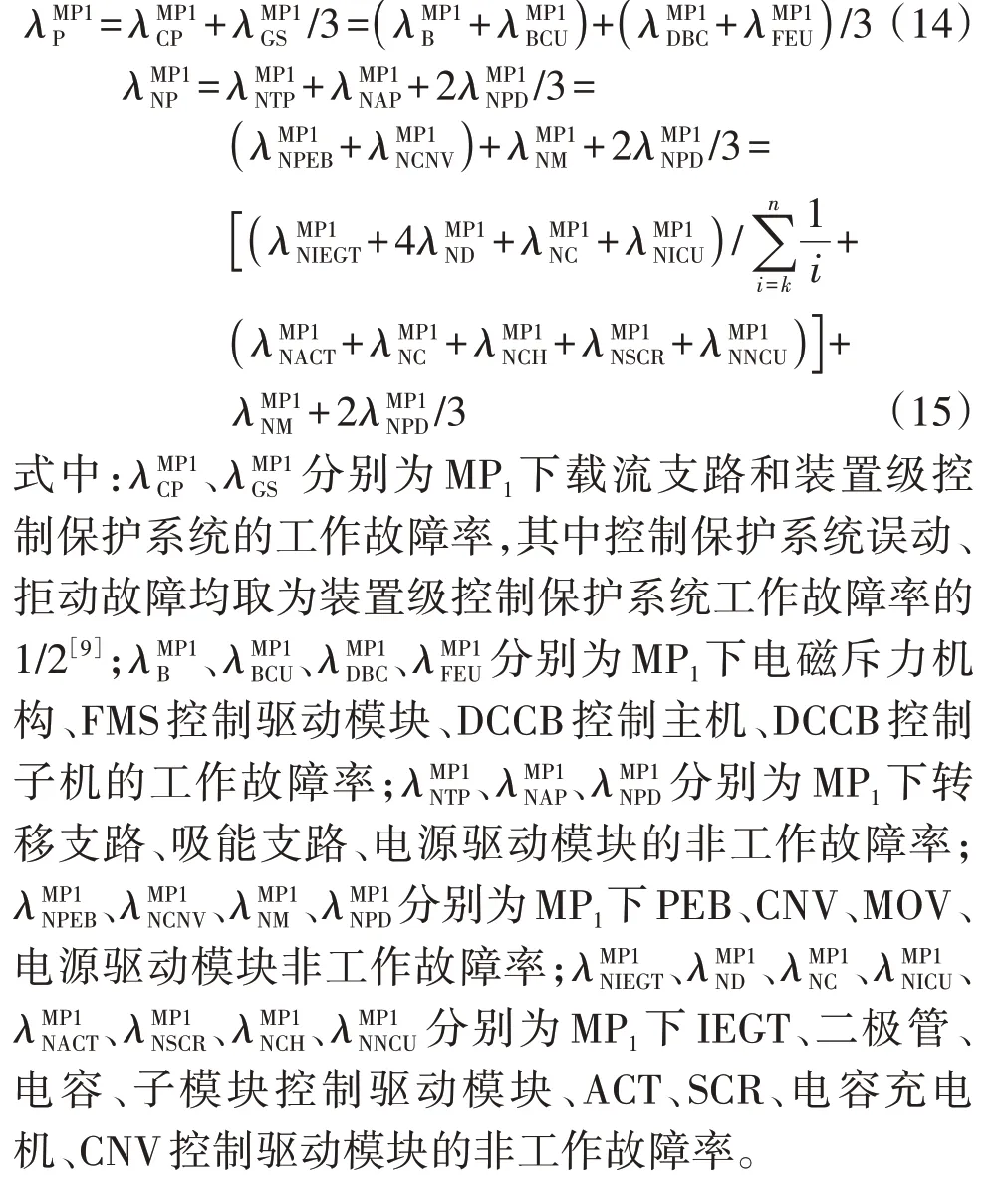
同理,根据3.2 节分析及式(3)—(13),可得到MP2—MP4下的工作故障率—和非工作故障率—。另外,考虑到电力电子设备组成元件中,功率器件可靠性最为脆弱,其次是电容器,二者薄弱程度远超其他元件[1],且DCCB各任务剖面下的工况具有较大的波动性。故本文在后续算例分析中,将主要对功率器件和电容器的工作、非工作故障率考虑各系数的影响,其余元件的工作、非工作故障率主要通过工作、非工作通用故障率乘以工作、非工作质量系数求取[18,20],且考虑各任务剖面正常运行时的最严峻工况,以求解较为保守的可靠性系数。结合实际运行项目,本文采用的MP1—MP4下各元件可靠性系数如附录A表A2—A7所示。
另外,本文方法具有一定的通用性,其他DCCB可借鉴本文方法进行类似建模,其通用性体现在建模流程和分析方法上,即:①DCCB 各任务剖面的确定;②根据DCCB 拓扑结构,建立各组件可靠性模型;③根据DCCB 工作原理,进行各组件故障影响分析;④根据各组件故障影响分析,基于可靠性预计法建立考虑非工作故障的DCCB 各任务剖面可靠性模型;⑤基于马尔可夫过程建立考虑多任务剖面及其非工作故障延续性的DCCB 可靠性模型,进而求解DCCB可靠性指标。
4 考虑多任务剖面及其非工作故障延续性的DCCB可靠性建模
DCCB 根据其保护区状态不同而处于不同任务剖面。一方面,在进行直流配电网可靠性评估时,需要结合DCCB 不同任务剖面可靠性参数精确计算配电网可靠性指标;另一方面,在进行DCCB 可靠性评估时,应全面计及DCCB 不同任务剖面可靠性情况,求解其不同任务剖面下的综合可靠性。考虑上述需求,本节考虑不同任务剖面及其非工作故障延续性,基于马尔可夫过程建立DCCB 可靠性模型,计算DCCB 不同任务剖面可靠性参数及DCCB 不同任务剖面下的综合可靠性参数。
由于本文旨在研究考虑不同任务剖面及其非工作故障延续性的DCCB 可靠性建模,为降低问题复杂度,做如下合理假设:①DCCB 仅在保护区短路故障时分闸,故障修复后合闸;②考虑DCCB 定期巡检,巡检时若发现非工作故障则对DCCB 进行停机维修;③各任务剖面有且仅有工作、工作故障、非工作故障及非工作故障维修4种状态;④DCCB 各故障修复时间相同(修复率为μ)为替换备用时间且大于保护区故障修复时间,即在DCCB 故障修复后的合闸过程中其保护区处于工作状态。考虑不同任务剖面及其非工作故障延续性的DCCB马尔可夫12种状态空间转移模型如附录A 图A5所示,各状态框的左上角序号1—12 表示12 种状态的状态序号,各状态可靠性参数计算步骤见附录A 步骤A1)—A4)。设λO为DCCB 巡检率;λPA和μPA分别为DCCB 保护区的故障率和修复率,其表达式如式(16)所示。
式中:Φ为DCCB 保护区包含的配电设备集合;λψ为保护区所包含的配电设备ψ的故障率;rψ为保护区所包含的配电设备ψ的故障修复时间。
另外,由图1 可知,确定DCCB 的保护区内还可能包含其他DCCB。根据图A5,DCCB 任务剖面的转移由保护区故障率和修复率决定。因此DCCB 可靠性既作为求解量,又作为输入量。故本文模型对DCCB 可靠性的求解过程实则是一个闭环迭代过程,具体求解流程图如图4所示。
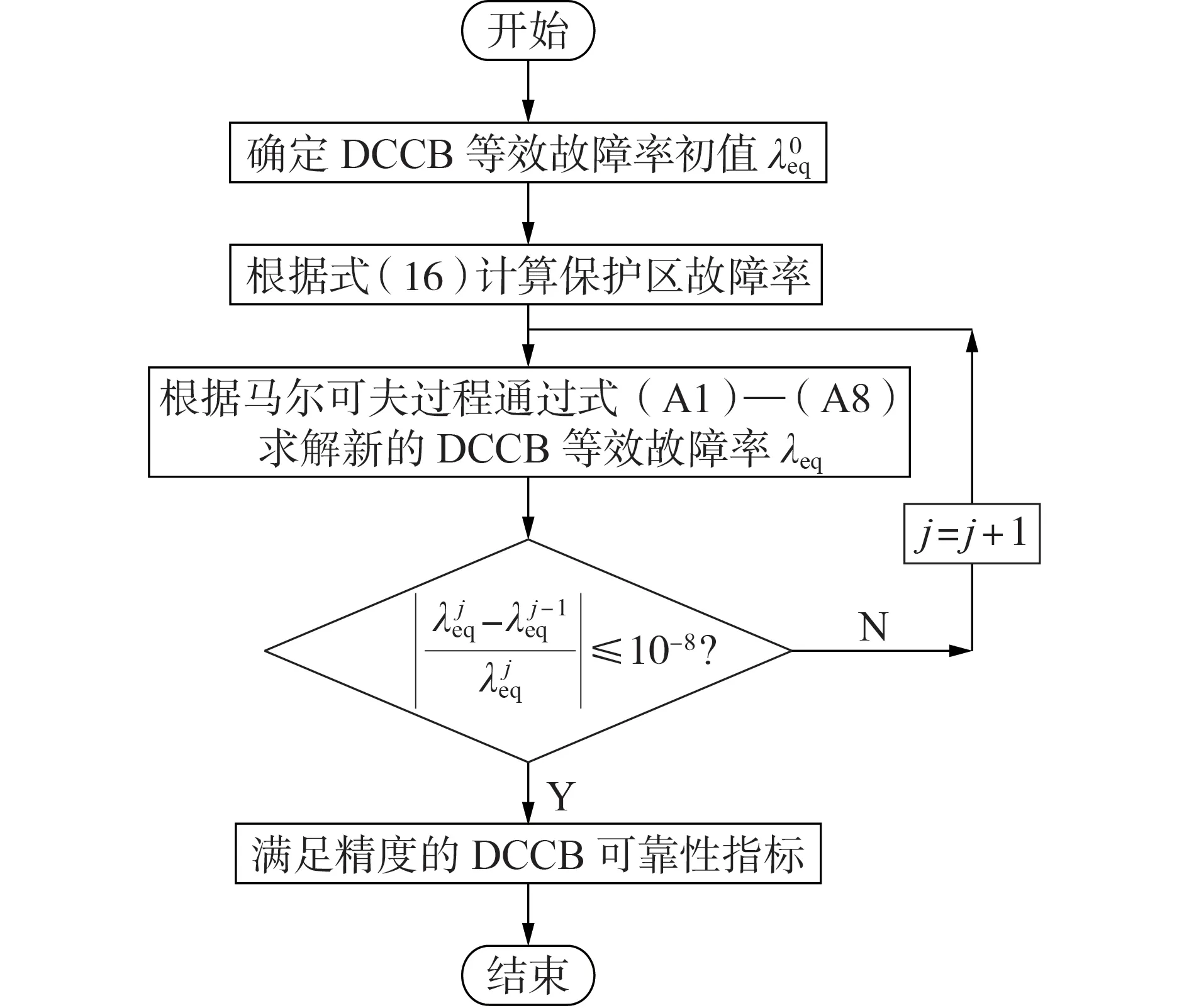
图4 DCCB可靠性指标求解流程图Fig.4 Solution flowchart of DCCB reliability indexes
5 算例分析
5.1 仿真系统介绍
以图1 所示“2-1”单环网结构直流配电网作为算例仿真系统。仿真系统中DCCB 不同任务剖面下各元件可靠性参数见附录A 表A8[18,20];其余配电设备可靠性参数见附录A表A9[8,10]。
5.2 DCCB各任务剖面可靠性参数求解
本节以唐家湾示范工程[21]中所应用的耦合负压型DCCB 为例对考虑非工作故障的DCCB 各任务剖面可靠性参数进行求解。根据示范工程中DCCB 两侧最大压差及其最大断流能力要求,该示范工程中DCCB需配置6个二极管桥子模块进行级联。
根据第3 节模型,不同任务剖面下DCCB 各组件可靠度随时间的变化情况如附录A 图A7 所示;DCCB 各任务剖面下可靠性参数见附录A 表A10。由图A7可知,不同任务剖面下各组件可靠度存在一定差异,该差异主要与不同任务剖面下各组件的参与工作情况、工作或非工作条件、环境条件等有关,其中以转移支路为例,由于在MP1和MP3下转移支路不参与工作,其故障为非工作温度、非工作环境等造成的非工作故障,而在MP2和MP4下转移支路分别用于转移短路电流和防止合于故障,此时转移支路参与规定功能的实现,其故障为工作温度、工作电应力、工作环境等造成的工作故障,显然相较于前者的非工作条件,处于工作条件下的后者具有更低的可靠度。另外,由图A7可知,不同任务剖面下,相较于其他组件,转移支路和装置级控制保护系统可靠度均处于较低水平,这主要由于前者包含了较多电力电子、电容元件,后者主要由电子电路构成,其均具有较低的可靠性。
表A10 中,MP2、MP4可靠性参数明显劣于MP1、MP3。这是因为相比于MP1、MP3,一方面MP2、MP4需要转移支路、吸能支路等组件共同参与,更多组件的串入势必会降低其可靠性;另一方面MP2、MP4分别用于实现快速切断短路电流和快速导通正常工作电流并防止合于故障,其工作环境等明显劣于MP1、MP3,这加剧了MP2、MP4可靠性的下降,同时也是造成MP2可靠性劣于MP4的主要因素。另外,MP3非工作故障的可靠性参数略低于MP1,这是由于算例中MP3相较于MP1对非工作环境的改善作用不足以弥补载流支路非工作故障带来的影响。
5.3 DCCB可靠性指标求解
根据第4 节模型求解图1 中DCCB①—④的各状态可靠性指标及综合可靠性指标,各状态可靠性指标见附录A 表A11(以DCCB④为例),迭代求解过程见附录A 图A8。进一步将本文模型、传统模型及其余2种模型进行对比分析(以DCCB④为例):模型1(传统模型),不考虑不同任务剖面[12];模型2,考虑不同任务剖面,不考虑非工作故障延续性;模型3,考虑不同任务剖面及非工作故障延续性,不考虑巡检;模型4(本文模型),考虑不同任务剖面及非工作故障延续性,考虑巡检(巡检周期为3 个月)。模型1—4 所对应的马尔可夫模型分别见附录A 图A9—A11、A5;各模型下的DCCB④状态可靠性指标分别见附录A 表A12—A14;各模型下的DCCB④综合可靠性见附录A表A15。
表A11 显示了图A5 中12 种状态出现的概率、频率和平均持续时间。由表可知:状态1—4的状态频率相近,这主要是因为DCCB 正常工作时,合闸状态、分闸过程、分闸状态、合闸过程通常相继出现,故具有相近的状态发生频率;状态2、4 的状态概率趋于0,这主要是因为分、合闸过程为毫秒级的瞬态过程,相较于其他状态的小时级、年度级稳态过程,理想情况下其长期状态概率将趋于0。
由图A8 可知,每次迭代下DCCB①—④的等效故障率相对变化量(Δ1—Δ4)存在如下关系:Δ1=Δ3>Δ2>Δ4,这是因为DCCB①—④等效故障率相对变化量与每次迭代下保护区故障率相对变化量直接相关,而保护区故障率相对变化量又直接受DCCB 迭代结果的影响,以DCCB④为例,由于DCCB④保护区故障率为1.255 2 次/a,明显大于DCCB①—③保护区故障率及DCCB④各次迭代的等效故障率,即相比之下DCCB④各次迭代的等效故障率变化对DCCB④保护区故障率相对变化量的影响最小,故每次迭代下DCCB④等效故障率相对变化量最小。
由表A15 可知,考虑不同任务剖面的模型2—4可靠性指标计算结果明显优于不考虑不同任务剖面的模型1(传统模型),这主要是因为传统模型忽略了DCCB 的PMS 具有多个规定功能的特点,传统模型仅考虑了DCCB 分闸过程开断短路电流这一规定功能,其可靠性模型为DCCB 各组件的串联模型,然而分闸过程在时间尺度上仅为毫秒级,近乎一个瞬态过程,实际上分闸过程期间组件同时发生故障的概率极低,因此传统模型实则是将毫秒级瞬态过程拉长至年度级,进而建立其可靠性模型,该模型虽能反映DCCB 核心功能的最严峻可靠性水平,但其评估结果过于保守且脱离实际运行情况,不适合直接应用于直流配电网可靠性评估,模型2—4对不同任务剖面的考虑有效克服模型1 在该方面存在的缺陷。
相较于模型3、4,模型2未考虑非工作故障延续性对DCCB 可靠性的影响,认为各任务剖面下不参与工作的组件完全可靠,故其求解得到的可靠性指标优于模型3、4,但实际上非工作组件在待命状态下仍会受到非工作环境系数、温度系数、电应力系数等的影响而具有故障风险,其虽不会对当前任务剖面可靠性造成影响,但可能会延续到下一任务剖面造成更加严峻的后果。对比表A13与表A14、A11 也可发现,考虑非工作故障延续性后MP2和MP4工作故障的状态概率、频率得到显著提升,即非工作故障延续性对MP2、MP4的工作故障情况造成显著影响,对非工作故障延续性的忽略使模型2存在一定不足。
模型3、4 均考虑了不同任务剖面及其非工作故障的延续性,二者的区别在于模型4在模型3的基础上进一步考虑了定期巡检,以及时发现非工作故障,并对DCCB进行停机维修,降低非工作故障延续到下一任务剖面而造成扩大性故障的可能。由表A15可知,模型4 考虑定期巡检后,其等效故障率略大于模型3未考虑巡检策略的情况,这主要是因为模型4的等效故障率中计及了非工作故障维修造成的DCCB停机的情况。相较于巡检发现非工作故障后的计划停机,分、合闸过程发生故障造成的停机影响更加严峻,因此对DCCB定期巡检具有重要意义。
5.4 关键子模块冗余配置对DCCB可靠性影响
进一步分析关键子模块冗余配置对DCCB 可靠性的影响,对于本文耦合负压型DCCB,其关键子模块主要指二极管桥子模块。各模型下考虑不同冗余度的DCCB等效故障率变化情况如图5所示。
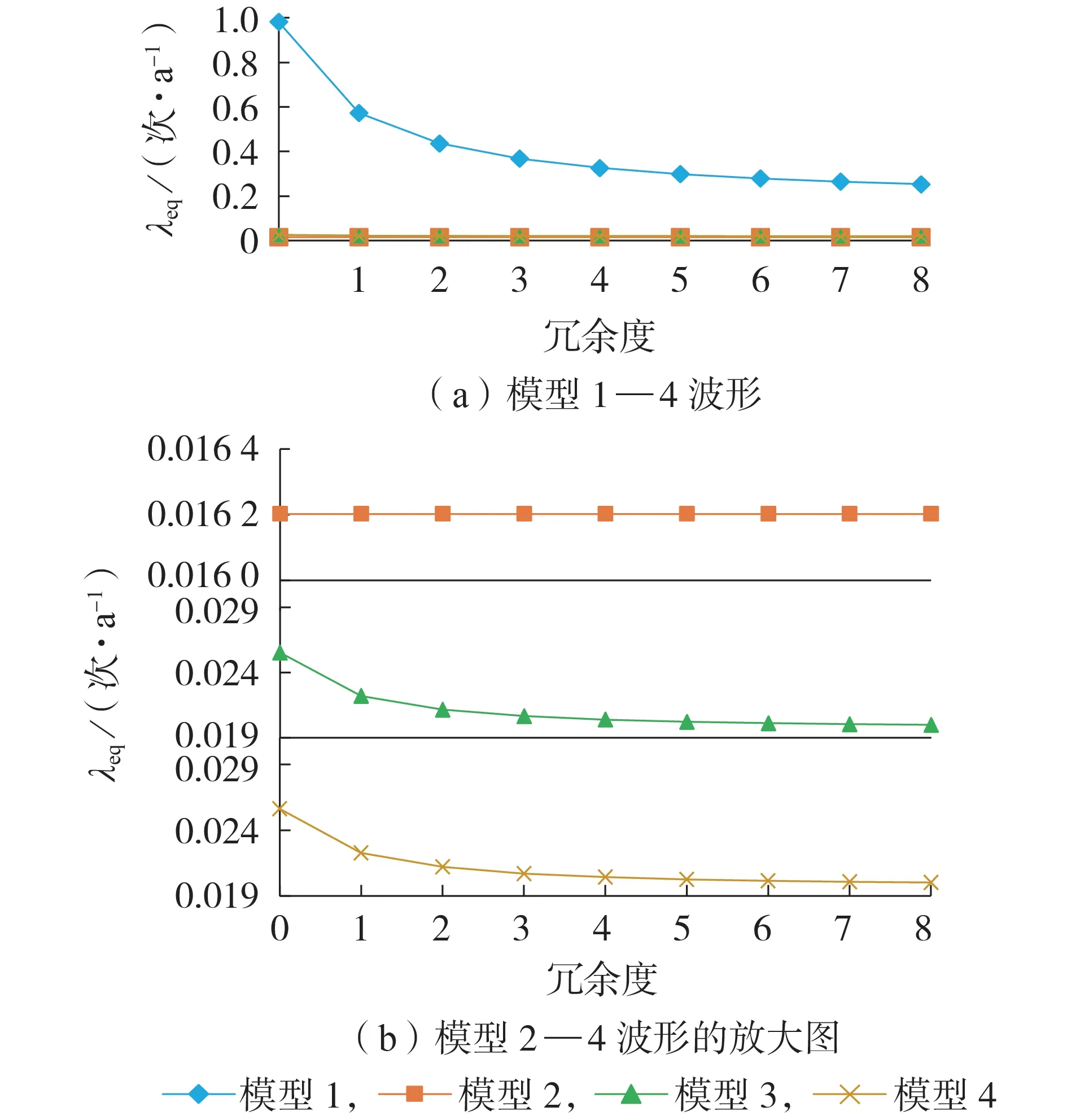
图5 关键子模块冗余配置对DCCB可靠性的影响Fig.5 Influence of redundancy configuration of key submodules on reliability of DCCB
由图5 可知,模型1 下关键子模块冗余配置对DCCB 可靠性的提升效果最为显著,同5.3 节分析,这主要是因为传统模型未考虑DCCB 不同任务剖面,其可靠性模型为各组件的串联模型,该模型认为转移支路始终参与工作,故对转移支路中二极管桥子模块的冗余配置极大地提高了DCCB 可靠性。而模型2 下关键子模块冗余配置对DCCB 可靠性的提升几乎没有影响,这主要是因为模型2 考虑了不同任务剖面,但未考虑非工作故障的延续性,由于转移支路仅在毫秒级的分、合闸过程中参与工作,而理性情况下瞬态过程的长期状态概率趋于0,即虽然转移支路的可靠性较低,但由于分、合闸过程的状态概率趋于0,考虑状态转移关系后分、合闸过程故障的状态概率也将趋于0,故冗余配置对DCCB 可靠性的提升几乎没有影响。模型3、4 下关键子模块冗余配置对DCCB 可靠性的提升具有一定效果,但效果并不显著,这主要是因为模型3、4在模型2的基础上考虑了非工作故障延续性,其中冗余配置可有效降低转移支路发生非工作故障的可能,进而降低了其延续到之后任务剖面造成工作故障的可能,但是转移支路非工作故障发生的可能本身就较小,因此冗余配置对其可靠性的改善也较小,故冗余配置对DC⁃CB可靠性的提升效果并不显著。
可见,实际运行中关键子模块冗余配置对DCCB 可靠性的提升效果并不显著,且该提升效果主要是由二极管桥子模块冗余配置降低了转移支路非工作故障的发生造成的。
6 结论
本文对考虑不同任务剖面及其非工作故障延续性的DCCB 可靠性进行建模研究,提出了一种基于马尔可夫过程的改进DCCB 可靠性模型,该改进模型可有效计及分、合闸状态,分、合闸过程多任务剖面及分、合闸状态非工作故障延续性对DCCB 可靠性的影响。所得结论如下。
1)相比于传统各组件的串联模型,本文模型对DCCB 不同任务剖面及其非工作故障延续性的有效考虑更加精细化地反映了DCCB 在多个规定的条件下多个规定的时间内完成多个规定功能的综合可靠性情况,其结果更具实际意义,可更好地指导基于可靠性的DCCB方案优选。
2)分、合闸状态非工作故障的延续性是分、合闸过程工作故障的主要原因;考虑定期巡检虽然在一定程度上劣化了DCCB 综合可靠性,但有效降低了分、合闸状态非工作故障延续至分、合闸过程造成扩大性故障的可能,对DCCB定期巡检具有重要意义。
3)实际运行中二极管桥子模块冗余配置对DCCB 可靠性的提升效果并不显著,且该提升效果主要是由降低转移支路非工作故障的发生造成的。因此在设计和运行中应兼顾经济性,考虑降低非工作故障发生的其他措施来进一步提高DCCB 可靠性。
另外,本文方法具有一定的通用性,其他DCCB可借鉴本文方法进行类似建模分析。
附录见本刊网络版(http://www.epae.cn)。
猜你喜欢
西安石油大学学报(自然科学版)(2022年5期)2022-10-08
青海电力(2021年2期)2021-07-21
农村电气化(2021年7期)2021-07-19
防爆电机(2021年2期)2021-06-09
江西化工(2018年5期)2018-11-02
电机与控制学报(2018年9期)2018-05-14
中国交通信息化(2017年4期)2017-06-06
电子制作(2017年1期)2017-05-17
科技与创新(2017年7期)2017-05-13
科技视界(2015年18期)2015-12-30