一种基于机器视觉的多工作头机械手结构的总体设计
2022-12-20 06:41杨振宇罗锦涛谢祥吉钟勇锐
机电产品开发与创新 2022年6期
杨振宇, 罗锦涛, 谢祥吉, 钟勇锐
(中山职业技术学院, 广东 中山 528400)
0 引言
在自动化设备和产线中, 机械手是上下料和生产线装配[1]的关键单元,尤其在需要对工件安装定位有较高精度要求的应用场合, 就更加需要对机械手拾取的工件进行角度校正和精确定位。单工作头的机械手,每次只能拾取和操作一个工件,生产效率不高,随着机器视觉技术和智能化技术的成熟应用和不断发展, 多工作头的机械手已经成为关键技术, 并成为当前自动化控制系统中重要的前沿技术,多工作头的机械手大大提高了生产效率,但技术含量高,结构工艺复杂[2],如何实现对每个工作头的角度校正和精度是一个重要的技术问题,本文针对这个问题,提出了一种多工作头机械手,能够一次拾取多个工件,又能分别对所拾取的工件进行精确的角度校正和安装定位,本文设计的机械手装置可以用于大型物料的上下料和角度校正,如拾取和搬用物料的码垛机械手,也可用于电子器件的贴片头,如用于PCB 电路板上的芯片进行贴片。
1 多工作头机械手的总体设计
机械手整体[3]在结构上,分为四个部分,多层式机架[4]部分, 动力部分,旋转校正部分,电磁离合部分,并由上向下布置,其中动力部分主要包括位于中心的伺服电机和围绕伺服电机布置的多个伸缩气缸,如图1 所示。
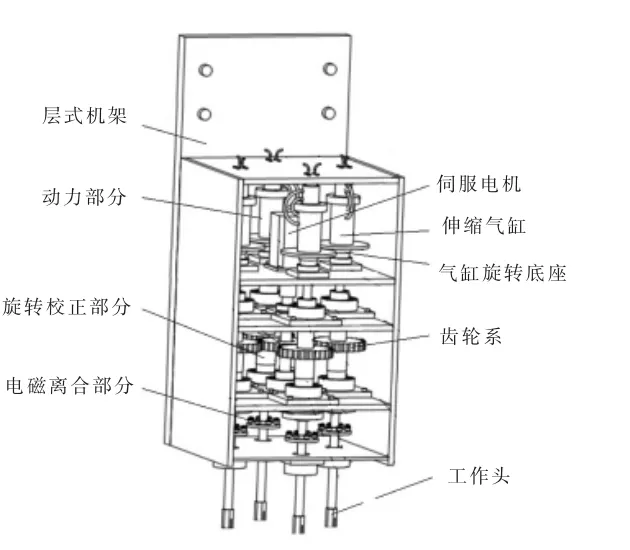
图1 多工作头机械手三维结构模型图
1.1 旋转校正部分的结构设计
为实现对多工作头的角度校正, 本设计采用一个伺服电机和一组齿轮系结构, 将伺服电机精确校正后的转动角度传动到机械手的每个工作头上, 以实现对每个工作头上工件的姿态角度校正。
如图2 所示齿轮系呈平面布置, 由伺服电机驱动的主动轮居于几何中心, 驱动各个工作头的从动轮围绕主动轮呈圆周布置,结构更加紧凑[5],从动轮的数目可以根据工件尺寸和机械手的大小而不同, 本文示例图中布置了四个从动轮,分别驱动四个工作头。
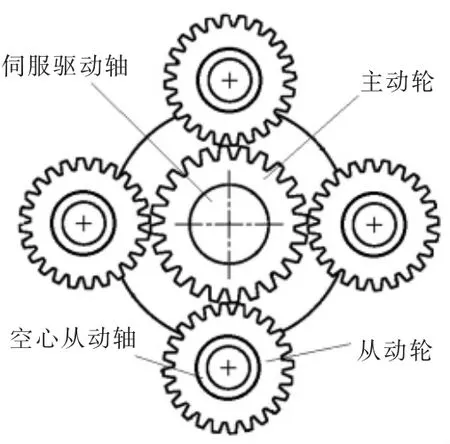
图2 旋转校正齿轮系
1.2 机械手结构设计
如图3 所示为单个机械手的三维模型,每个机械手都包括气缸,气缸旋转底座,气缸杆,空心旋转轴, 电磁离合器等,并自上而下安装在横向布置的多层式机架上,其中,空心旋转轴上装有从动齿轮,气缸杆的前端安装有用于拾取工件的吸盘或机械夹爪。每个机械手具有相同结构,将多个机械手围绕伺服电机和伺服驱动轴呈圆周型布置,就形成了一个多工作头的机械手。

图3 单个机械手的机械结构三维模型图
机械手工作头可以竖向伸缩移动,以实现对工件的拾取或安装放置, 也可以轴向旋转,以实现对工件的角度校正。为实现工作头的竖向伸缩,气缸杆自上而下从空心旋转轴中穿过,在气缸杆的两端,布置有精密直线轴承以保证机械手在竖直方向具有精度较高和平稳的直线运动,如图4 所示。 为实现工作头的轴线旋转,工作头气缸安装在气缸旋转底座上,并装有气动旋转接头,以使气缸可以360°旋转。

图4 机械手的单个工作头结构
1.3 电磁离合器的结构设计
为实现对每个工作头所拾取的工件,分别进行角度校正,本文设计了一种新颖的电磁离合器,用于将空心旋转轴和工作头气缸杆进行离合控制。 电磁离合器的设计结构如图5 所示,其中,离合器磁轭安装在机架上, 离合器动盘通过键和空心旋转轴相连并同时旋转,动盘上装有静摩擦片。本文所设计电磁离合器的主要特点是气缸杆上安装有一个盘型支架, 在盘型支架的圆周方向装有多个可伸缩的动衔铁和弹簧机构,动衔铁顶部贴装有动摩擦片,当工作头需要角度校正时,电磁离合器得电,电磁力克服了弹簧力,将盘型支架上的动衔铁紧紧吸合到动盘上,伺服电机旋转,带动空心旋转轴、电磁离合器动盘和气缸杆一起同轴旋转,这时所有的从动轮和空心旋转轴一起旋转,但只有电磁离合器得电吸合的工作头进行了角度校正,校正完成后,伺服电机停止,电磁离合器松开,气缸动作,将校正后的工件进行安装和放置。

图5 电磁离合器的结构
2 多工作头机械手的控制流程
为实现机械手一次拾取多个工件, 并在安装放置时能对每个工件进行准确的定位, 需要将一个较大视野和足够像素的机器视觉相机放置于机械手下方, 以对多工作头一次拾取工件后的所有工件的拾取姿态进行拍照,检测每个工作头上的工件角度和姿态偏差, 并和视觉系统所设定的标准姿态模板进行比对, 以得到每个工作头上工件的拾取姿态角度的偏差值,以用于后期的校正。
多工作头机械手的程序控制流程如图6 所示, 机械手一次拾取多个工件后, 移动到机器视觉相机位置进行拍照,得到每个工作头上工件的角度偏差[6],视觉系统将检测到的每个角度偏差传送给PLC, 然后PLC 分别控制相应工作头的电磁离合器和气缸,以及伺服电机动作,以实现对每个工作头进行角度校正, 每个工作头的角度校正和安装放置的顺序依次逐个展开, 例如首先工作头1上的电磁离合器动作, 使其上的空心旋转轴和工作头气缸杆相吸合,伺服电机旋转,带动工作头1 的单个机械手整体旋转,完成校正后,伺服电机停止,工作头1 电磁离合器松开,工作头1 上的气缸伸出,对校正后的工件进行安装和放置后,气缸缩回,然后工作头2 上的电磁离合器动作,然后依次循环,最终依次对所有工作头皆完成工件的校正和安装放置后,整个机械手复位,回到工件拾取位置,开始下一次拾取。

图6 多工作头机械手的控制流程
3 结束语
多工作头的机械手大大提高了生产效率, 已成为自动化生产设备的主流, 目前多工作头机械手传动结构复杂,成本高,并且在结构上受空间位置影响较大,为实现对所有工作头上的物料工件进行角度校正, 顺序控制优化算法也较为繁琐,复杂度大[7],影响了机械手的定位精度。本文提出的多工作头机械手,所有的单个机械手工作头围绕伺服电机驱动轴呈圆周型布置,具有结构简单,空间利用性好,可移植性强的特点,尤其是设计了一种电磁离合器, 将空心旋转轴和气缸杆两个有轴向相对运动的零件,可以相互吸合,同轴旋转运动,也可以互不干扰,气缸杆穿过空心旋转轴进行轴向运动, 有效解决了对每个工作头进行单独角度校正的技术问题, 相比于传统的多工作头机械手,控制算法简单,控制流程简洁,工作效率高,这种结构可以广泛应用于集成电路装配,精密仪器装配,也可以用于大型物料的上下料、码垛等生产实际中,具有较高的应用价值。
猜你喜欢
经纬天地(2022年3期)2022-07-20
微特电机(2020年11期)2020-12-30
制造技术与机床(2019年12期)2020-01-06
制造技术与机床(2019年9期)2019-09-10
制造技术与机床(2018年11期)2018-11-23
电子制作(2018年17期)2018-09-28
通信电源技术(2018年3期)2018-06-26
河北农机(2017年12期)2018-01-20
制造技术与机床(2017年4期)2017-06-22
制造技术与机床(2017年2期)2017-05-04