船用捷联式惯导与超导陀螺监控器组合导航研究
2022-12-16 13:50:40朱炼
榆林学院学报 2022年6期
朱 炼
(1.哈尔滨工程大学 智能科学与工程学院,黑龙江 哈尔滨 150001;2.安徽工商职业学院 应用工程学院,安徽 合肥 231131)
惯性器件包括加速度计和陀螺仪两大类。陀螺仪的种类很多,在自由转子陀螺仪中,主要有动压气浮陀螺仪[1]、静压气浮陀螺仪[2]、静电陀螺仪[3-6]、超导陀螺仪[7-8]等。超导陀螺仪转子悬浮在低温真空的环境中,无摩擦和热效应干扰,其理论精度很高,比传统陀螺仪高出2~3 个数量级。但超导陀螺仪施矩困难,尚不能直接应用于半解析式的惯导系统中。为了提高导航精度,将超导陀螺组成监控器,与半解析式惯导系统进行组合,构成惯导与超导陀螺监控器组合导航系统,可以提高导航系统的精度和工作时间。
惯导系统分为捷联式惯导系统和平台式惯导系统两大类。平台式惯导系统是将包含陀螺稳定平台,而捷联式惯导系统无稳定平台,采用数学解算。目前,用的较多的是捷联式惯导系统。
捷联式惯导系统广泛地应用于航天、航空、航海以及兵器工业中。下面以水面船舶导航用的捷联式惯导与超导陀螺监控器构成的组合导航为例进行研究。
1 超导陀螺监控器的组成和原理
超导陀螺监控器主要由两个超导陀螺仪和两个加速度计组成。两个超导陀螺仪分别为赤道陀螺仪和极轴陀螺仪,其角动量分别平行于赤道平面和地球自转轴。这两个超导陀螺仪都不施加控制力矩,其相对惯性空间稳定。两个加速度计安装在超导陀螺监控器水平的平台上。利用惯导加速度计的输出与这两个加速度计的输出的差值实现对水平平台作精密控制。通过随动系统控制跟踪惯导平台,实现地理水平平台跟踪当地水平面。
设为L当地地理经度,λ为当地地理纬度,γ1为极轴陀螺角动量的高度角,γ2为赤道陀螺角动量的高度角,ωie为地球自传角速率,根据超导陀螺监控器的陀螺仪和平台的几何关系及相关知识,得到如下关系式:

利用测得的极轴陀螺角动量的高度角和赤道陀螺角动量的高度角,根据上面关系式可以求出当地地理经纬度。
2 捷联式惯导与超导陀螺监控器组合导航的数学模型
2.1 状态方程
设组合导航坐标系为东(E)、北(N)、天(U)坐标系,φE、φN、φU分别为东、北、天方向的平台失准角,δVE、δVN、δVu分别为东、北、天方向的速度误差,δL、δλ、δh 分别为经度、纬度、高度的位置误差,εx、εy、εz分别为陀螺仪三轴的漂移误差,▽x、▽y、▽z分别为加速度计三轴的零偏误差。
设状态变量为


在上式中,AN(t)9×9为误差矩阵,是九行九列的矩阵,误差矩阵中第一行的非零项元素为


以上关于AN(t)9×9矩阵的元素中,ωie为地球自传角速率,RM是地球子午圈曲率半径,RN是地球卯酉圈曲率半径,fE、fN、fU分别为东、北、天方向加速度计输出的比力。
AS(t)9×6为转换矩阵,是九行六列的矩阵,

W(t)为系统的噪声向量,

其中,ωgx、ωgy、ωgz为陀螺仪三轴的白噪声;ωax、ωay、ωaz为加速度计三轴的白噪声。
G(t)为系统噪声转移矩阵,
2.2 量测方程
在捷联式惯导与超导陀螺监控器组合导航系统中,我们以超导陀螺监控器输出与捷联式惯导输出的位置之差和速度之差构建量测方程。由于本系统用于船用组合导航,在位置之差中暂不计算高度之差,在速度之差中暂不计算天向速度之差。
设捷联式惯导、超导陀螺监控器的经度、纬度输出值分别为LI、λI、LS、λS,其实际输出值分别为LIR、λIR、LSR、λSR,其位置误差分别为δLI、δλI、δLS、δλS。则有

设捷联式惯导、超导陀螺监控器的东、北方向速度输出值分别为VIE、VIN、VSE、VSN,其实际输出值分别为VIRE、VIRN、VSRE、VSRN,其速度误差分别为δVIE、δVIN、δVSE、δVSN。则有

组合导航的量测方程为

3 卡尔曼滤波器
设系统的数学模型为


4 仿真分析
设组合导航系统的初始位置为北纬38 度,东经121 度,高度为0。地球的半径为6 378 km,地球自转角速度为7.292 115×e-5rad/s,重力加速度为9.8m/s-2。陀螺仪的常值漂移为0.02(°)/h,陀螺仪的随机漂移为0.01(°)/h,加速度计的初始偏差为10-3g,加速度计的随机偏差为10-4g,其中g为重力加速度。东向、北向速度误差均方差曲线分别如图1、2 所示,经度、纬度误差均方差曲线分别如图3、4所示。
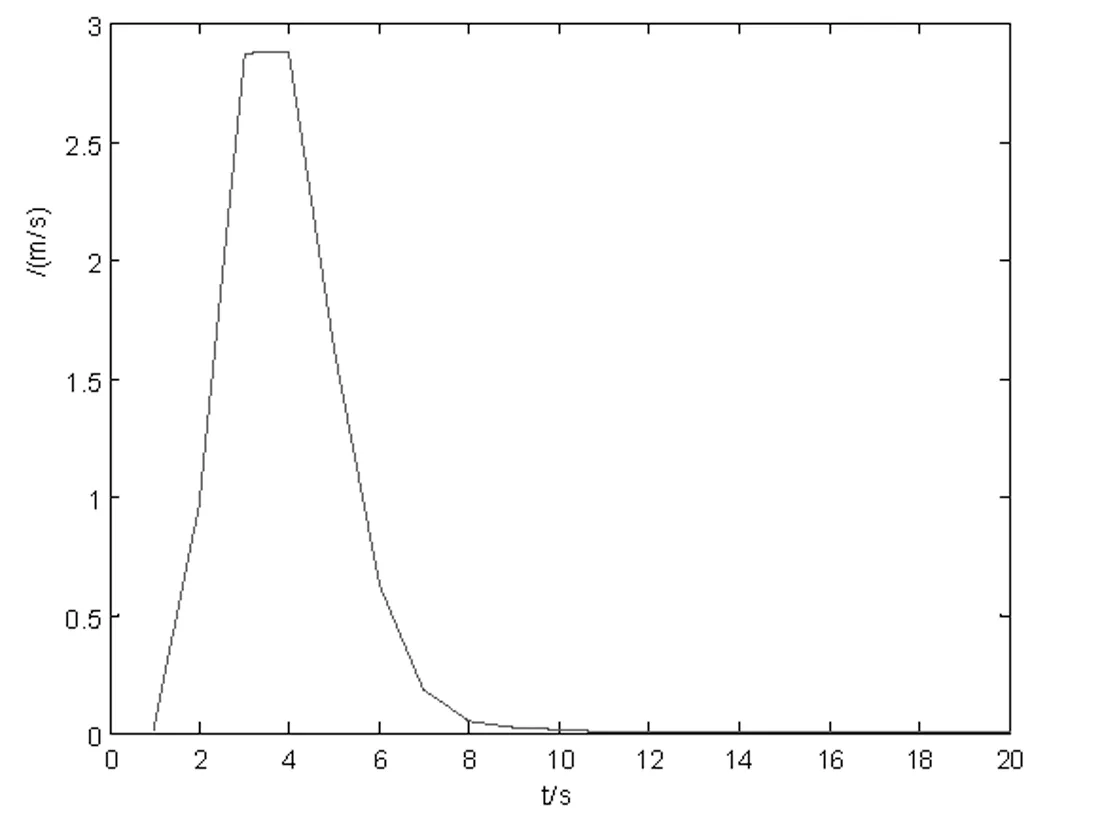
图1 东向速度误差均方差曲线

图2 北向速度误差均方差曲线
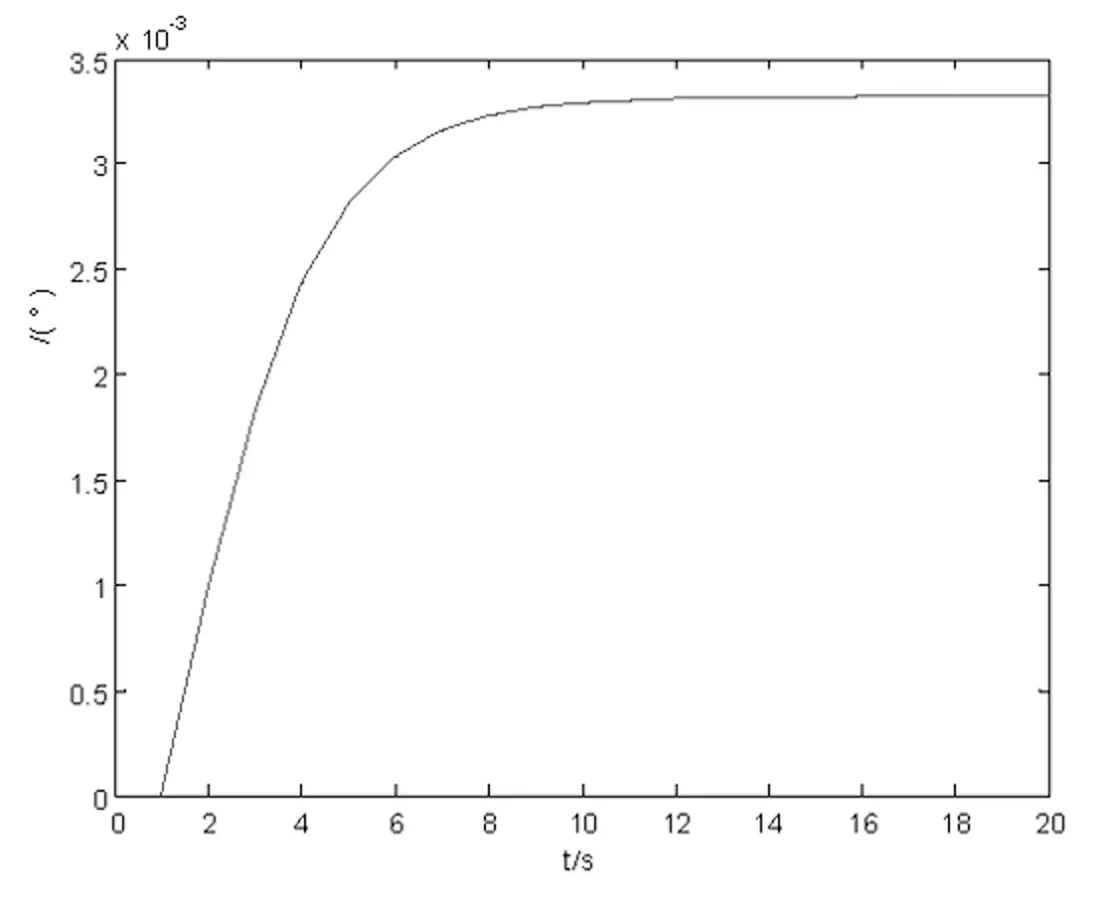
图3 经度误差均方差曲线

图4 纬度误差均方差曲线
从图1、2 中可以看出,组合导航的东向和北向速度误差的均方差在10 s 后逐渐减小趋于零;从图3、4 中可以看出,组合导航的经度和纬度误差均方差在10 s 后逐渐稳定值,而且稳定值较小,组合导航取得了很好的效果。
5 结语
将超导陀螺组成监控器,并与捷联式惯导组成组合导航系统,很好地解决了超导陀螺仪施矩困难、不能直接应用于半解析式的惯导系统中的问题。随着超导陀螺研制精度的提高,超导陀螺监控器的精度也将提高,这将进一步提高组合导航的精度。
猜你喜欢
科学技术创新(2020年17期)2020-06-30 02:48:06
测控技术(2018年2期)2018-12-09 09:00:56
北京航空航天大学学报(2018年1期)2018-04-20 06:38:19
北京航空航天大学学报(2017年5期)2017-11-23 05:53:18
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
北京航空航天大学学报(2017年12期)2017-04-23 08:31:50
电子制作(2017年22期)2017-02-02 07:10:09
火控雷达技术(2016年1期)2016-02-06 02:18:01
计算机工程(2015年4期)2015-07-05 08:28:57
锻造与冲压(2015年14期)2015-06-21 11:35:31