
基于Netlogo 的智能交通灯可控系统的研究与仿真
2022-12-16 13:50周艳玲张云翔
榆林学院学报 2022年6期
周艳玲,张云翔,曹 晶
(合肥学院 人工智能与大数据学院,安徽 合肥 230601)
1 引言
随着我国智慧城市这一理念的不断传播,智慧交通也成了当下城市化进程的标志之一。汽车数量的增多,是导致城市交通堵塞变得日益频繁的重要因素,使得人们的出行效率降低,这也是智慧交通出现的原因。由于城市道路交通堵塞所造成的原因有很多种:如车辆数目增加、城市道路建设不够合理以及路口交通信号灯时间变化缺乏灵活性等[1],这些问题严重影响了人们的日常出行和城市化建设,城市交通堵塞问题成了当下各个城市急需解决的问题之一。
对城市交通红绿灯的调控是改变城市道路交通状况、提升车辆运行效率以及减少红绿灯等待时间的有效方法。当下城市交通系统具有错综性、冗杂性、不合理性等特点,且突发情况较多,很难构建出巧妙合理的仿真模型[2-3]。然而,简单巧妙的Netlogo 仿真模型可以有效的处理这一不足。从仿真角度看,对城市复杂道路的建模与仿真是将时间与交通流量比进行有效结合的仿真技术,城市轨道交通仿真技术是当下智慧交通系统的一个重点项目,是将计算机融于城市智能化交通的里程碑。运用Netlogo 的仿真平台模拟城市道路以及车辆运行状况,把车辆用多智能体表示,为所有的智能体都赋予其“生命”,它们会在虚拟的环境中不断演变,从而产生合理有效的数据信息以供工作人员的研究分析。
固定的交通信号灯时间[4]是当下我国城市智能化交通无法实现的重要阻碍,不仅影响了人们的日常生活,还加大了城市道路的压力。曾有人提出根据全天车流量的显著不同,把一天分为几个时间段,每个时间段使用不同的配时[5]。但这种研究方案具有很强的局限性,只适用于一些特定的场合,例如交叉路段的车流量要保证一样,这显然不符合城市道路交通多变性这一特征,而且在处理突发情况时会出现瘫痪状态,即导致交通堵塞甚至直接死机。传统方案无法充分发挥智慧交通信号灯的灵活性和高效性,智能交通灯可控系统应运而生。
2 智能交通灯可控系统的研究现状
我国交通信号灯的时间基本上都是相关部门提前设置完成的,而且当某个路段碰到特殊情况,例如,早晚高峰、阴雨天气、突发事故等,此时都需要相关部门依照该路段的交通堵塞情况,人为来操控交通信号灯的时间,智能化程度不足,效率十分低下。2012 年,黄向党提出基于车流量的交通灯动态调整策略[6],该策略打破了固定交通灯时间的成规,运用动态规划方法,将算法融入进交通信号灯时间周期,智慧交通开始出现。2013 年,李洪中提出了一种基于模糊推理算法的智能交通灯系统[7],他通过动态规划的思想,将城市中的所有道路划分成若干个子道路,然后对局部道路建立联系,将所有的子道路通过协调控制系统联系起来,从而完成对整座城市交通信号灯的规划。2017 年,董海龙等人通过对不同交通路段进行分析,把神经网络和模糊识别相结合从而得出合理有效的交通信号灯控制方法,把车辆在路口的平均等待时间作为研究方案,实现对不同路口智能交通控制[8]。2018 年,邓丽云等人提出了一种基于模糊推理规则的智能交通灯系统[9],该系统通过模糊推理规则对十字路口的交通信号灯时间进行分配,通过比较不同路段的红灯相位等待车辆和绿灯相位等待车辆的差值作为输入量,以绿灯延长时间为输出量,从而推理出各个车道的绿灯时长。2020 年,姚斐等人提出的交通信号灯迭代学习控制方法[10],根据当天车流量的不同,把一天分为若干个时间段,然后记录每个时间段的车流量,通过迭代学习控制,找出当前路段的最适红绿灯时间。
虽然当前社会中也有大量的智能化交通信号灯控制系统的创造和使用,使得交通堵塞问题得到了相对的缓和,但是部分系统中控制交通信号灯时间的算法却显得相对复杂,成本较高。本文提出的是一种十分简便的交通信号灯控制系统,通过在仿真平台手动设置汽车数量,并根据道路车辆的拥堵程度实时更改交通灯的时长,经过反复测试选出最佳方案。
3 智能交通灯可控系统的模型分析
本文利用Netlogo 仿真平台模拟城市道路中的十字路口及车辆运行,比较不同环境下车辆的平均等待时间,进而调节红绿灯时间,从而减少车辆的平均等待时间。同时采用迭代学习控制方法[11],来解决传统交通路段等待时间长等问题,确保车辆在道路上不会发生堵车且能够正常高效地行驶。
3.1 研究思路
首先,在Netlogo 仿真软件中赋予智能体汽车这一属性,并设置不同的汽车数量,接着通过最佳周期时长公式算出合理范围内的红绿灯时间。但是现实社会中城市路段的交通流具有很强的随机性,交通堵塞这类情况时有发生,而且面临这种突发事故无法及时处理。因此需要利用该仿真平台模拟出车辆通过十字路口处的各种突发情况,并及时将数据记录下来,通过将数据不断的比较和处理,将能最大限度减少车辆的平均等待时间。由于本研究所用仿真软件较为简单,因此不能应用于复杂的城市路口[12]。针对快速路入口,研究中使用PD 型迭代控制,来实现信号灯时间不断变化的效果,然后采用合理的建模实验调节信号灯的迭代学习增益,使该系统的最终效果具有更强的适应性,不足之处是其采用的3 种交通流模型都是宏观交通流模型,在微观特性下会影响结果的准确性[13]。因此,我们选用了最为简单的十字路口,从而可以更加简洁、准确的模拟路况。
3.2 构建模型
基于Netlogo 的智能交通信号灯可控系统模型分为三个阶段:主体之间如何交互、模型的建立与实现、测试验证。模型中以时间步长tick 作为一个单元,每个单元都完成这一阶段上主体与主体、主体与其他因素的相互作用,发生自身状态的变化,然后进入下一阶段,如此迭代循环。
3.2.1 主体之间的交互过程
模型中将海龟模拟成车辆,瓦片模拟成城市道路。车辆通过与城市道路的交互判断自己的所在位置,以此确定自己的行驶状态,如是否可以转弯。车辆与车辆之间的内部交互分为两类,一类是汽车类海龟同类之间的相互作用,另一类为汽车类海龟与信号灯类海龟的交互。汽车类海龟之间的交互可以对车辆速度进行控制,当后车速度大于前车时,判断是否能超车,否则降低自己的速度。如果前方车辆的速度为零,后面的车辆因此会处于等候状态,则将当前该车速度也设置为零。车辆在路过十字路口时,会对红绿灯进行合理的判断,红灯时将速度设置为零,绿灯时方可通过该路段。
3.2.2 模型的建立与实现
在确定了系统模型的主体和模型间的交互关系后,通过Netlogo 编码来完成相关代码,其中的红绿灯时间,是通过运用最佳周期时长公式1,进一步获取实际情况中该十字路口红绿灯时间的合理范围。其关系如图1 所示:
图1 十字路口交通仿真模型
图1 为十字路口交通仿真模型图,在图1 中,平台界面分为操纵按钮以及车辆所处环境,调节numcars 控制界面中出现所有车辆数,通过current-auto来动态调节当前十字路口的红绿灯变化,其中uprains 滑块是用来调节该路段是否为下雨天,ticksper-cycle 滑块是用来调节红绿灯的动态变化周期。目前,汽车的最大速度限制(在speed-limit 滑块中找到)是1.0,这是由于汽车必须以前进的速度向前看,以确定是否有汽车在它们前面行驶,如果没有,它们就会加速,如果有,它们会放慢速度。Change light 按钮可随时控制路口的红绿灯交换(一般在发生堵车时使用),Setup 按钮重置所有变量,Go 按钮开始运行模型。
3.2.3 测试验证
通过对模型分析,当路过十字路口处的车辆较少时,且没有交通信号灯的阻拦,等待的车辆、平均等待时间以及车辆的平均速度都要比有交通信号灯要好得多,假设:只有一辆车,没有交通信号灯可以畅通无阻,有交通信号灯反而要等待。然而,随着车数量的增加,有交通信号灯的模式优势就愈发明显,交通信号灯有助于维持道路的秩序。因此固定的红绿灯周期,会造成一个车辆较少的相位等待时间的浪费,智能交通灯可以成功的避免这个问题。
3.3 最佳周期时长
最佳周期时长公式如下:

公式(1)中,C0为周期时长,L 为损失时间,l 为启动时浪费的时间,A 为黄灯时间,I 为时间间隔,i为相位数,Y 为交通流量比[14]。
交通流量比计算公式如下:

公式(2)中,Yi表示相位i 的临界流量比,qi表示第i 个相位的交通流量,Si是相位i 的临界饱和流量。
在控制过程中,周期时间的值应该在一个合理范围内[15]。当周期时间数值较小时,能明显提高通行能力、缓解交通压力;而当周期超过150s 时,不仅无法有效提升通行能力,反而会增加通行延误时间。与此同时,周期时间也不应设计得过短,如果周期过短,行人和车辆很难安全通过路口,容易造成交通事故。因此,需要规定周期的上限值和下限值,一般周期时长为45≤C≤150[16]。
4 智能交通灯可控系统的模型仿真
为了验证智能控制交通信号灯的益处,本文通过Netlogo 平台搭建了车辆通过十字路口处的状态,并将产生的数据记录下来,将模型中所产生的数据进行比对,从而得出了两组不同情况下的实验数据。
第一组实验比较的就是车流量在不同情况下,对实验的影响,图2 与图3 分别描述的是在红绿灯时间固定的情况下车流量较少和车辆较多的情况下十字路口等红绿灯的车辆、车辆的平均速度、车辆的平均等待时间。

图2 车辆较少在十字路口的状况
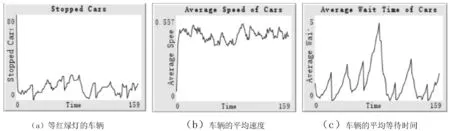
图3 车辆较多在十字路口的状况
根据以上图2 和图3 的最后一幅图可以看出,在红绿灯时间不变的情况下,经过十字路口时,车辆的平均等待时间发生了明显的变化,车辆较多时车辆的平均等待时间也因此变长(峰值较大)。因此,本文在车辆较多的情况下就需要通过更改红绿灯的运行时间,以减少车辆的平均等待时间。
图4 为智能交通灯下车辆较多时的状况,在图4 中,本文通过智能改变红绿灯时间的方法,对比图3 和图4 的最后一幅图可以发现,智能交通灯大大降低了车辆在十字路口时的平均等待时间。

图4 智能交通灯下车辆较多时的状况
第二组实验比较的是在天气异常情况下,红绿灯时间对车辆在十字路口平均等待时间的影响,图5 描述的就是车辆在下雨天时过十字路口的状况。

图5 下雨天车辆在十字路口的状况
将上述图5 与图2 对比发现,车辆在异常天气下速度明显变慢,且速度基本保持稳定,但车辆的平均等待时间反而变长,因此,在异常天气情况下,仍然需要更改红绿灯的时间,使车辆在过十字路口的等待时间缩短。因为下雨天视野模糊,车速较慢,极易发生拥堵,因此本系统需要缩短红绿灯时间,让车辆更快通过。
图5 和图6 均为下雨天车辆运行的一些数据,对比可发现在天气异常情况下智能交通灯通过缩短红绿灯时间,可以有效的减少车辆的平均等待时间,相比于传统的交通信号灯手动调节,其效率可想而知。

图6 下雨天改变红绿灯时间在十字路口的状况
5 总结
本文通过运用Netlogo 平台模拟城市道路中最为常见的十字路口,利用最佳周期时长公式,在合理范围内找出最合适的红绿灯时间,并将其运用在不同情况下,利用数据比对,最终找出不同情境下的红绿灯合理时间,大大减少了车辆经过十字路口的平均等待时间,相比于日常道路上固定的红绿灯时间,本研究更为人们的日常生活带来了方便。但是本文适用范围也存在一定的局限性,主要体现在以下两个方面。
(1)本文研究适用于车量适中或者天气异常的情况下,当车流量较少时,模型产生的数据会出现异常现象。因此,在后期对模型的优化中进一步对该问题改进。
(2)本研究只能在路段的十字路口处才能发挥它的效果,不能对城市中所有的道路进行有效的控制。因此,在后续工作中会增加该模型的适用性,完善对城市中各个道路的优化。
猜你喜欢
——国外课堂互动等待时间研究的现状与启示
中小学教师培训(2022年6期)2023-01-11
电子制作(2019年12期)2019-07-16
电子制作(2019年24期)2019-02-23
快乐语文(2018年25期)2018-10-24
小学生导刊(2018年13期)2018-06-29
小天使·一年级语数英综合(2018年6期)2018-06-22
儿童故事画报·发现号趣味百科(2017年9期)2018-03-13
电子制作(2016年21期)2016-05-17
视野(2015年14期)2015-07-28
读者(2015年12期)2015-06-19
