无人直升机主桨毂中央件疲劳试验加载技术研究
2022-12-09 09:00包名李大海刘红艳
装备环境工程 2022年11期
包名,李大海,刘红艳
(中国直升机设计研究所,江西 景德镇 333001)
随着复合材料、动力系统、传感器等新技术的发展,无人直升机技术也得到迅速发展。无人直升机具有垂直起降、悬停、巡航以及快速转变航向等特性,这就使其成为了一种理想的无人飞行器,在军民领域均得到广泛应用[1]。在军事领域,无人直升机作为一款面向未来作战的舰载无人直升机,可作为驱护舰、两栖攻击舰等大中型水面舰船编队的升空平台,与水面舰艇、舰载有人机等装备形成有效互补,有效提高了海上机动作战、联合作战、综合防御作战的信息保障能力,可执行多种作战和后勤保障任务[2],是海军走向远海和执行多样化军事任务的重要支撑。在民用领域,无人直升机可用于民用的电力巡线与架线、地图测绘、交通监控、森林防火、地震灾情探测等事务[3]。
主桨毂中央件是无人直升机旋翼系统中的典型复杂动部件,也是重要的承力部件[4]。它一方面需要承担自桨叶、柔性梁传递过来的离心力、挥舞弯矩和摆振弯矩;另一方面,还要平衡来自自动倾斜器系统的变距拉杆等载荷。在实际飞行工况中,主桨毂中央件承载环境复杂,不仅受到高周振动载荷引起的高周疲劳,还要考虑空地载荷为主的低周疲劳[5]。在进行无人直升机中央件地面疲劳试验时,因其试验件承载形式和传力路线复杂、数据测量点较多,往往给试验加载和调试造成了较大困难。
在国内直升机主桨毂中央件疲劳试验方面,学者们进行了大量研究。姚海涛等[6]针对直升机球柔性桨毂中央件疲劳试验,重点研究了弹性轴承模拟旋转载荷加载及调试等关键技术,但对于无轴承旋翼桨毂中央件疲劳试验涉及的载荷传力及调试,尤其是关于桨毂中心弯矩及支臂对接面联合调试技术的影响并未做说明,文中提出的弹性轴承模拟旋转载荷加载调试技术并不完全适用于无轴承桨毂中央件疲劳试验。邓文等[7]以某型机主桨毂中央件疲劳试验为对象,从试验夹具安装、控制系统精度、应变测量误差等方面进行了分析,对试验载荷调试异常及其起因进行了判定,提出了改进措施,对提供中央件疲劳试验加载精度提供了指导。但文中提到的中央件载荷调试技术只针对有人直升机球柔性桨毂中央件疲劳试验进行了验证与优化,对于无轴承桨毂和新构型无人直升机还需要结合实例进行进一步分析和验证。姚海涛等[8]以主桨毂中央件疲劳试验为例,研究了旋转载荷特点和加载方法,介绍了旋转载荷合成效果的验证方法,此法只适用于传统金属或球柔性桨毂中央件疲劳试验,不适用于无轴承桨毂中央件疲劳试验。李清蓉等[9]以某型直升机夹板组件疲劳试验为例,介绍了疲劳试验中试验边界条件的模拟方法及其重要性,虽然为中央件疲劳试验边界条件的准确模拟提供了借鉴,但并未说明对于无轴承或新构型桨毂中央件疲劳试验涉及的桨毂中心和支臂对接面载荷的联合调试,应如何有效准确地进行边界模拟。包名等[10]针对某新型无人直升机主桨毂中央件的结构形式和承载特点,研究了中央件疲劳试验载荷调试技术,提出了一种无人直升机中央件疲劳试验载荷调试方法,并予以验证,提高了无人直升机中央件地面疲劳试验的载荷精度,为后续型号研制提供了试验技术借鉴。但文中并未详细说明提出的新方法在无轴承和新构型桨毂中央件疲劳试验中应用的差别与优劣。国外致力于发展共轴反转式无人直升机、圆环型无人直升机、侧转旋翼式无人直升机及长航时无人直升机[11],试验技术也得到了长足发展。
本文首先介绍了2 种旋翼构型的无人直升机中央件疲劳试验加载方案,随后对比分析了2 种方案中近端和远端离心力加载设计对试验载荷(包括位移和相位等)、试验加载频率、试验稳定性及试验件结构等方面的影响。最后针对上述2 种方案中存在的问题,提出了解决办法,进而探索出适用于不同旋翼构型中央件疲劳试验的加载技术。
1 主桨毂中央件受力简介
1.1 常规单旋翼式无人直升机中央件
单旋翼无人直升机主桨毂中央件是主旋翼系统的关键动部件,其旋翼构型为无轴承旋翼结构,共连接4 片桨叶,中央件通过柔性梁和袖套与桨叶连接[12],无轴承旋翼既没有挥舞铰、摆振铰,也没有变距铰,所有的挥舞、摆振和变距运动都通过桨毂支臂与桨叶的弹性变形来实现。在实际飞行中,直升机桨毂中央件受力复杂,主要承受地–空–地循环,高低周疲劳相结合模式的复合载荷[13],主桨叶所作的挥舞运动、摆振运动以及离心运动,可以将挥舞弯矩和摆振弯矩通过柔性梁、袖套等部件沿某一既定的传力路线传递给中央件,使中央件承受随机复合载荷的作用[14]。因此,中央件支臂对接面挥舞弯矩Mb、摆振弯矩Mt以及桨毂中心弯矩Mf等载荷将作为单旋翼无人直升机中央件的特征载荷在地面疲劳试验中予以施加。
如图1 所示,中央件与柔性梁假件对接面(或称中央件支臂对接面)上的载荷在耳片中心位置,载荷坐标系为桨叶坐标系,主要包括以下载荷:离心力Fc,静载,桨叶坐标系X向为正;摆振弯矩Mt,静、动载,桨叶坐标系Y向为正;挥舞弯矩Mb,静、动载,桨叶坐标系Z向为正(右手坐标系法则);桨毂中心弯矩Mf;升力FZ,沿桨毂中心轴线竖直向上;扭矩MZ,沿旋翼轴轴线逆时针旋转。
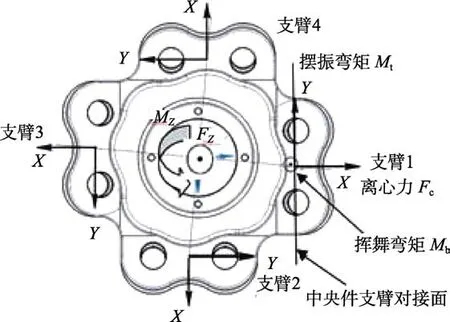
图1 单旋翼主桨毂中央件受力Fig.1 Test loads of main rotor hub from conventional rotor
1.2 共轴旋翼式无人直升机中央件
共轴旋翼无人直升机依靠与上下桨毂旋翼向相反的方向旋转来平衡扭矩,提供直升机升力和平飞的动力。主桨毂中央件是旋翼系统的关键动部件,需要通过地面试验进行性能考核。试验中中央件的受力如图2 所示。坐标系OXYZ为右手坐标系,原点位于桨毂中心,XY平面垂直于桨毂中心轴线,X轴指向1#支臂,Z轴沿桨毂中心轴线轴向朝上[15]。
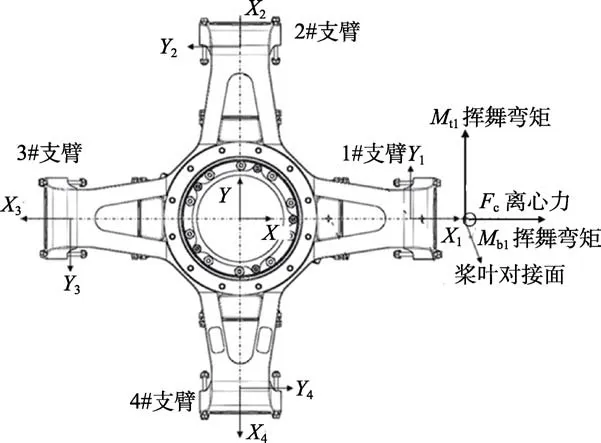
图2 共轴旋翼主桨毂中央件受力Fig.2 Test loads of main rotor hub from coaxial rigid rotor
2 中央件疲劳试验加载设计
2.1 单旋翼中央件疲劳试验加载设计
在柔性梁假件的适当位置设计挥舞力和摆振力加载装置,如图3 所示。采用离心力远端加载模式,即在柔性梁假件外侧设计离心力加载点。试验加载时,使离心力经过柔性梁假件传递至支臂对接面,使中央件支臂组件承载离心力载荷,真实模拟直升机飞行受力状态(如图4 所示),以便施加挥舞力、摆振力和离心力载荷[16]。试验时可先将4 支臂施加一恒定离心力,然后调试挥舞力和摆振力,并通过最小二乘法插值柔性梁假件上2 处测量剖面的输出弯矩,得到中央件支臂对接面挥舞弯矩Mb和摆振弯矩Mt,并使其满足设计要求。中央件所承受的弯矩可通过施加在柔性梁假件上的横向剪力来实现[17]。试验加载装置如图5 所示。
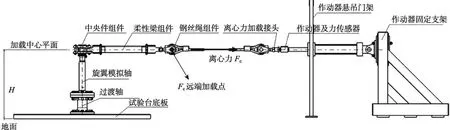
图4 离心力远端加载示意图Fig.4 Loading form of centrifugal force for conventional rotor

图5 单旋翼无人直升机中央件疲劳试验装置Fig.5 Fatigue test device of main rotor hub for conventional rotor
如图3 所示,试验时可考虑将桨毂中心载荷和中央件支臂对接面载荷等效分解到各柔性梁假件上进行挥舞力、摆振力和离心力加载,从而得到以下理论计算公式。


图3 中央件支臂加载示意图Fig.3 Loading form of main rotor hub for conventional rotor

式 中:Mbsi、Mbdi、Mtsi、Mtdi与Fbsi、Fbdi、Ftsi、Ftdi分别为中央件各支臂对接面的挥舞弯矩、摆振弯矩及需要施加在柔性梁假件上的挥舞力和摆振力;a和b分别为挥舞力加载点到支臂对接面的距离及挥舞力和摆振力加载点之间的距离;L0为支臂对接面中心到桨毂中心的距离;L1为离心力加载中心线与桨毂中心的偏置距离;A为中央件支臂与柔性梁假件连接处存在的安装预锥角;Mf、MZ和FZ分别为桨毂中心弯矩、静态扭矩和静态升力。
2.2 共轴旋翼中央件疲劳试验加载设计
同样在桨叶假件的适当位置设计挥舞力和摆振力加载装置,如图6 和图7 所示。采用离心力近端加载模式,即在桨叶假件内侧设计离心力加载点,试验时桨叶假件只传递挥舞弯矩和摆振弯矩,不传递离心力至桨叶对接面(如图8 所示)。该试验方案同样需要先对中央件4 个支臂同时施加一恒定离心力,然后调试挥舞力和摆振力,再通过最小二乘法插值桨叶假件上测量剖面的输出弯矩,得到桨叶对接面挥舞弯矩Mb和摆振弯矩Mt,使其满足加载和设计要求[18]。桨叶对接面所承受的弯矩可通过施加在桨叶假件上的横向剪力来实现。整体试验加载装置如图9 所示。
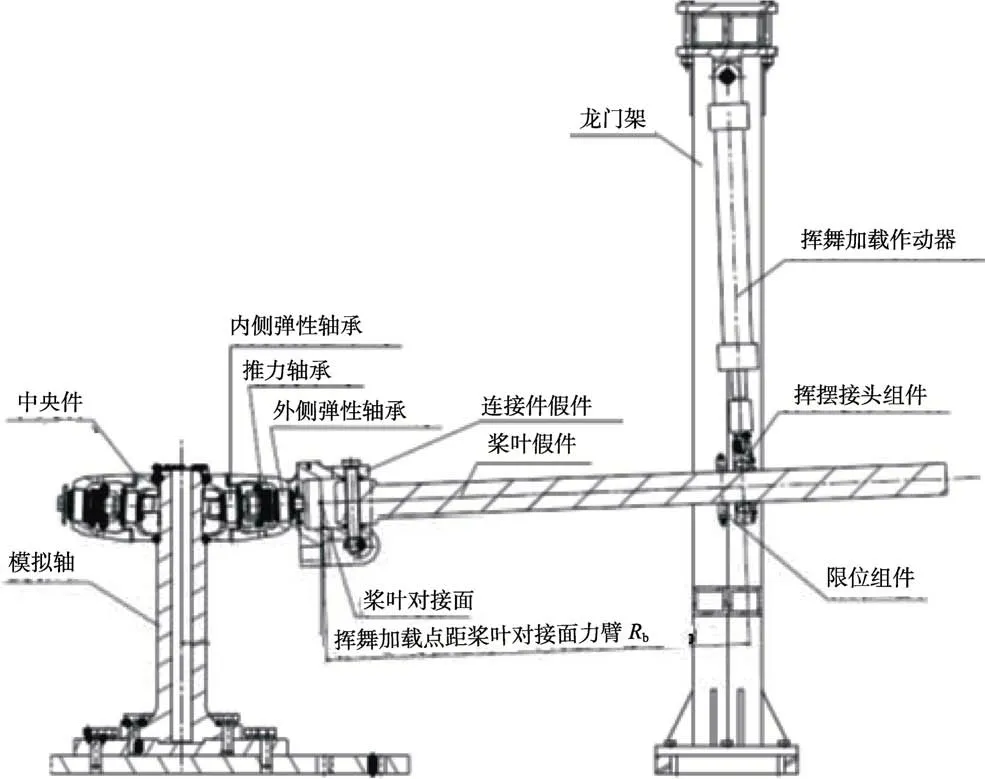
图6 中央件单支臂挥舞力加载示意图Fig.6 Lifting force loading design of main rotor hub for coaxial rigid rotor
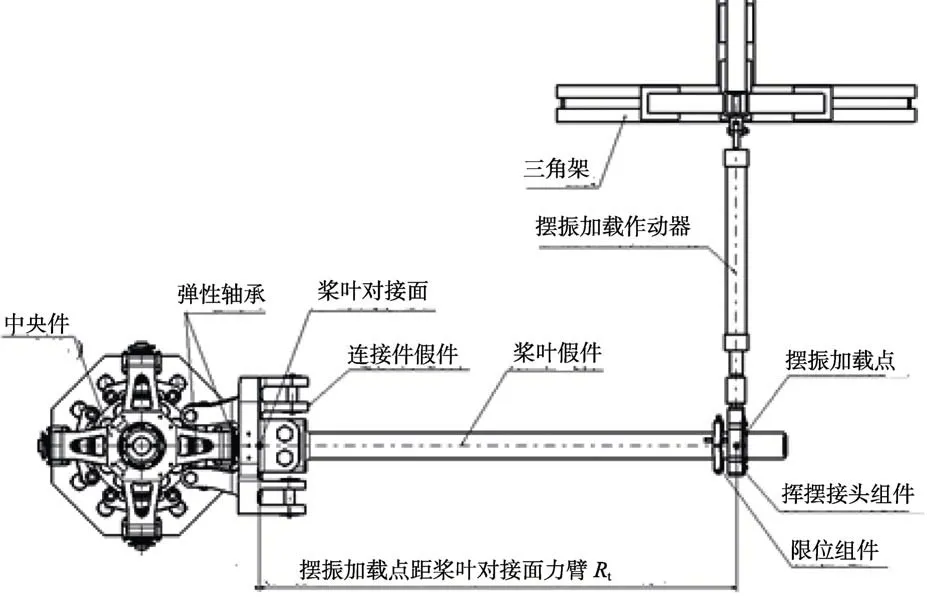
图7 中央件单支臂摆振力加载示意图Fig.7 Stopping force loading design of main rotor hub for coaxial rigid rotor
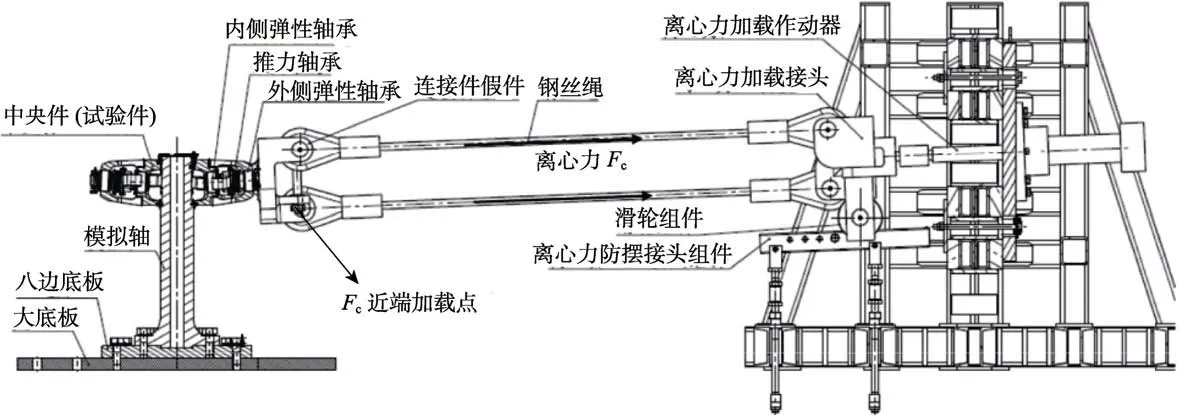
图8 离心力近端加载示意图Fig.8 Loading form of centrifugal force for coaxial rigid rotor

图9 共轴旋翼无人直升机中央件疲劳试验装置Fig.9 Fatigue test device of main rotor hub for coaxial rigid rotor
对中央件实际承受载荷进行分析,得到任意支臂处挥舞力和摆振力等载荷的表达式,如式(6)—(8)所示。
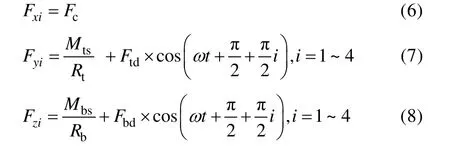
式中:Fxi、Fyi和Fzi分别为需要对中央件各支臂施加的离心力、摆振力和挥舞力;Ftd、Fbd、Mts及Mbs分别为试验要求施加的摆振力和挥舞力动态值、桨叶对接面处的摆振弯矩和挥舞弯矩的静态值;Rt为摆振力加载中心至支臂对接面的力臂;Rb为挥舞力加载中心至对接面的力臂。
2.3 载荷计算原理及调试方法
由于受中央件结构的空间和形状限制,无法在支臂对接面布置弯矩测量片直接测量目标载荷,故可考虑在延伸出来的桨叶假件上适当剖面位置粘贴应变片,测量各剖面输出弯矩,再将其结合最小二乘法插值计算出中央件支臂对接面弯矩,并使其满足试验要求。
在桨叶假件或柔性梁假件上选择2 组剖面(如图10 中的剖面1 和剖面2),布置2 组弯矩应变片。试验时,在挥舞加载面和摆振加载面分别施加挥舞力和摆振力(如图10 中Fb和Ft),根据剖面1 和剖面2的MB1 和MT1、MB2 和MT2 的挥舞弯矩和摆振弯矩,插值计算支臂对接面(或称桨叶对接面)的挥舞弯矩Mb和摆振弯矩Mt,中央件支臂对接面挥舞弯矩和摆振弯矩计算方法见图10。
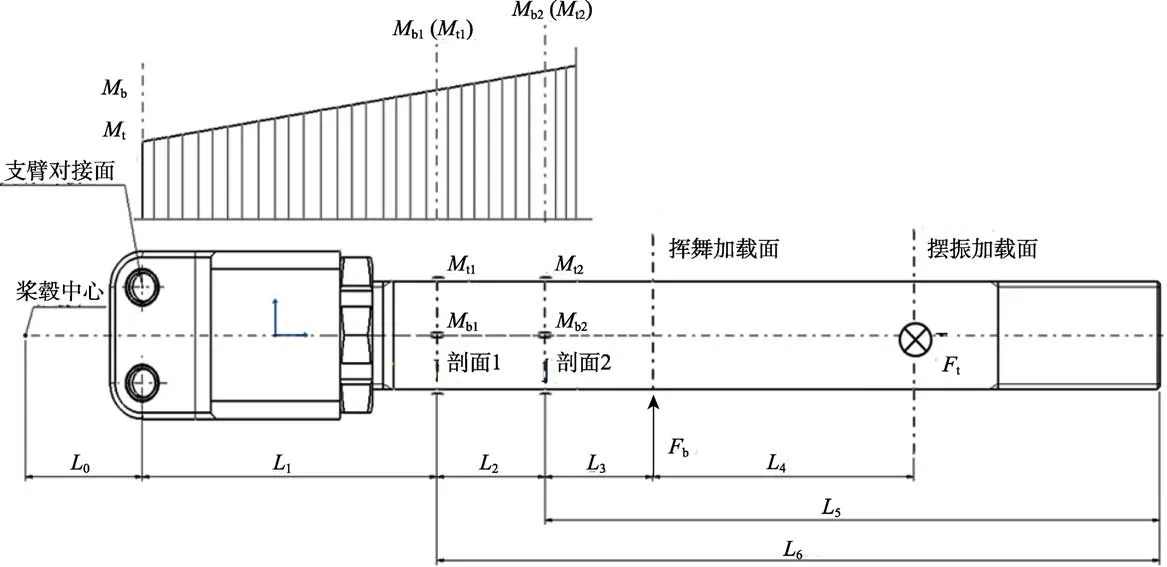
图10 中央件支臂对接面弯矩计算Fig.10 Principle of calculation for sleeve alignment surface
挥舞力和摆振力加载调试是试验调试技术的关键,尤其是加载力大小的控制以及加载点位置的布置,都会对目标载荷的测量产生较大影响。因此,如何准确调试挥舞力和摆振力载荷使中央件支臂对接面弯矩满足试验要求,可以采用以下方法进行。
1)试验中可在距离中央件支臂对接面(或称桨叶对接面)适当位置,分别施加挥舞理论计算剪力Fb0和摆振剪力Ft0进行加载调试,动载荷相位可按公式(9)和(10)施加。中央件各支臂动载荷相位依次相差90°。旋翼为俯视顺时针旋转,载荷施加时按俯视逆时针旋转。4 个支臂的动态摆振、挥舞弯矩按式(9)、(10)计算。
式中:Mts、Mtd、Mbs、Mbd分别为中央件支臂对接面处的静态和动态摆振弯矩及挥舞弯矩。
2)调节挥舞剪力Fb和摆振剪力Ft,并根据桨叶假件或柔性梁假件上载荷测量剖面的输出弯矩,插值计算出中央件支臂对接面(或称桨叶对接面)的实时动态载荷,并使其满足试验要求。必要时可配合调整挥舞力和摆振力加载点位置,提高加载精度,保证目标载荷满足试验要求,试验调试方法流程如图11 所示。
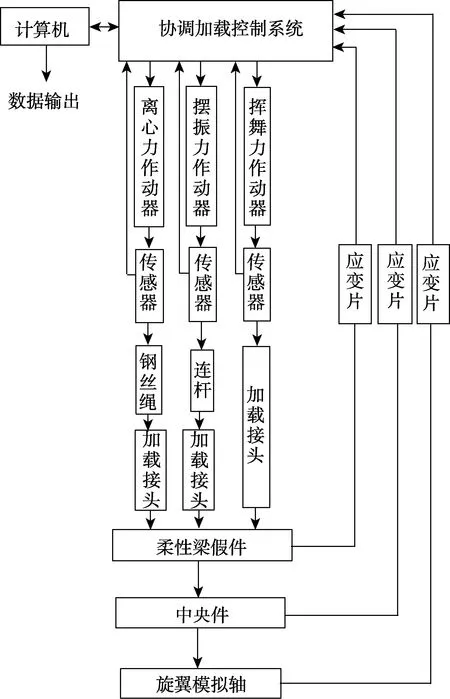
图11 无人直升机中央件疲劳试验调试方法流程Fig.11 Debug method of fatigue test about Main Rotor Hub for unmanned helicopter
3 试验问题分析及解决办法
3.1 单旋翼中央件疲劳试验问题分析
3.1.1 离心力对挥舞力的“卸载”影响
由于中央件各支臂受相位协调加载挥舞力的影响,中央件中心桨盘实际上是在做上下起伏运动的,这样中央件4 个支臂所承受的离心力方向不是水平的,而是与水平方向倾斜一个角度,即θ角。挥舞加载作动器实际施加的载荷为Fb=FB+Fc2,大于理论上需要施加的挥舞力FB,即挥舞作动器载荷需要抵消一部分离心力在挥舞方向的分力Fc2来对柔性梁假件施载。离心力对挥舞力存一定的卸载作用,挥舞力理论施加值与实际调试值存在“较大偏差”,离心力卸载示意图如图12 所示。图12 中,Fc1和Fc2分别为离心力Fc沿水平方向和挥舞方向的分力,FB为达到对接面挥舞弯矩时理论上需要施加的挥舞力载荷,θ角为中央件4 个支臂在试验时实际所承受的离心力方向与水平方向的夹角。挥舞力理论值与实际调试值的偏差见表1 和表2。从表1 和表2 可以看出,在单旋翼中央件疲劳试验中,由于离心力对挥舞力的卸载作用,致使挥舞力的实际调试值往往与理论计算值偏差较大。试验调试中,一般需要通过增加挥舞力载荷来使中央件支臂对接面挥舞弯矩满足试验要求;在共轴旋翼中央件疲劳试验中,由于离心力在试验件近端加载,即离心力不通过桨叶假件传递,挥舞力的力学加载模型为标准的悬臂梁模型,离心力不会对挥舞力产生卸载作用,故而挥舞力的实际调试值与理论值偏差较小,2 阶段高周载荷的偏差率均在3%以内。
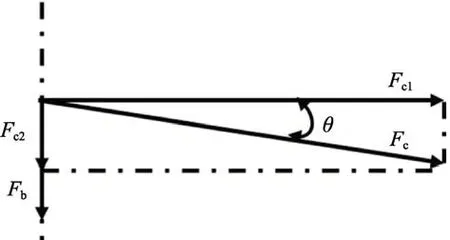
图12 离心力卸载示意图Fig.12 Centrifugal force unloading in main rotor hub fatigue test for conventional rotor

表1 单旋翼中央件疲劳试验挥舞力理论值与实际值偏差Tab.1 Deviation between theoretical value and actual value of lifting force in test for conventional rotor%

表2 共轴旋翼中央件疲劳试验挥舞力理论值与实际值偏差Tab.2 Deviation between theoretical value and actual value of lifting force in test for coaxial rigid rotor%
3.1.2 柔性梁假件上载荷测量剖面挥舞弯矩相位差异
从调试结果可以发现,柔性梁假件上载荷测量剖面的摆振弯矩输出比较稳定,2 测量剖面之间的摆振弯矩相位吻合较好,但是载荷测量剖面之间的挥舞弯矩却存在较大的相位差(如图13 中的ΔΦ1~ΔΦ4),给中央件支臂对接面载荷测量计算带来较大困难。针对柔性梁假件贴片测量剖面挥舞弯矩相位差异,进行各工况试验测量,结果见表3。图13 中A1Mb1、A1Mb2、A2Mb1、A2Mb2、A3Mb1、A3Mb2、A4Mb1和A4Mb2为与中央件支臂连接的4 个柔性梁假件上2 贴片剖面挥舞弯矩的应变测量值。

表3 单旋翼无人直升机中央件试验工况测量结果Tab.3 Measuring results of many fatigue test conditions about main rotor hub for conventional rotor

图13 柔性梁假件载荷测量剖面挥舞弯矩的相位差Fig.13 Lifting force phase difference about survey section at two positions on simulated flexible beam
从表3 可以看出,对中央件单个支臂或2 个支臂(包括对臂和邻臂)施加挥舞力或摆振力载荷时,柔性梁假件上2 测量剖面的输出弯矩相位基本一致,但是一旦中央件4 支臂施加离心力后再施加挥舞载荷,柔性梁假件上2 测量剖面的挥舞弯矩相位则存在明显的相位差。离心力的加载使中央件桨盘带动柔性梁假件产生了小角度“倾斜”,此时柔性梁假件所承载的力学模型已经不是单纯意义上的悬臂梁力学模型,施加在柔性梁假件上的挥舞弯矩受到了离心力的卸载作用,故柔性梁假件上各测量剖面之间的挥舞弯矩会存在明显的相位偏差。
在实际飞行工况下,直升机旋翼高速旋转产生的离心力是沿桨叶弦线方向的动态矢量,其大小和方向都在随飞行姿态的改变而变化[19]。虽然可以通过调整挥舞作动器载荷和摆振作动器的输出载荷来拟合中央件支臂对接面的弯矩载荷,并使其达到试验要求,但是实际试验中中央件桨盘是在复合载荷作用下做周期性起伏运动[20],而与其连接的离心力加载钢丝绳末端与固定支架连接,限制了离心力加载的随动性,即离心力可能做到了载荷模拟,但并未完全模拟直升机飞行姿态,而这很可能就是导致上述问题的主要原因之一。
3.2 共轴旋翼中央件疲劳试验问题分析
1)挥舞力方向位移较大,试验加载不易控制,载荷调试误差较大。共轴旋翼中央件疲劳试验中,由于采用离心力近端加载方案,即离心力不通过桨叶假件传递至中央件支臂,而是直接施加在支臂连接工装上,施加在桨叶假件上的挥舞力和摆振力不受离心力作用。虽然桨叶假件力学承载模型是简单的悬臂梁模型,简化了桨叶对接面弯矩的力学计算模型,但带来的弊端是桨叶假件在承受挥舞力载荷时,挥舞力方向位移相较于单旋翼中央件试验中的挥舞力位移却偏大许多,见表4 和表5。中央件试验台摆动扰度大,小载荷大位移导致试验载荷精度不易控制,桨叶对接面载荷误差较大,见表6。

表4 共轴旋翼无人直升机中央件疲劳试验挥舞力方向位移Tab.4 Lifting direction displacement in main rotor hub fatigue test for coaxial rigid rotor mm

表5 单旋翼无人直升机中央件疲劳试验挥舞力方向位移Tab.5 Lifting direction displacement in main rotor hub fatigue test for conventional rotor mm

表6 共轴旋翼中央件支臂桨叶对接面动态弯矩误差Tab.6 Deviation about dynamic load of sleeve alignment surface in main rotor hub fatigue test%
从表4 和表5 可以看出,共轴旋翼中央件疲劳试验中,挥舞力方向位移相对于单旋翼中央件试验要增大许多,这主要与共轴旋翼中央件试验采用的离心力近端加载设计和中央件特有的桨毂装配构型有关。当离心力不经过桨叶假件传递,直接施加在近端试验件上时,虽然节省优化了试验占地空间资源,但随之带来了诸如挥舞力方向位移较大,试验台摆动挠度大、不平稳,容易出现载荷或位移超限导致试验跳停等问题。此外,从表6 可以看出,桨叶对接面摆振动态弯矩误差较大,共轴旋翼中央件疲劳试验中较小的试验载荷要求,必然会引起较大的载荷调试误差,因此对于小载荷的旋翼系统部件调试,往往载荷精度不易控制。
2)加载频率较低,弹性轴承等陪试件损坏率较高,试验运行稳定性较差。共轴旋翼中央件疲劳试验由于挥舞力加载位移较大,中央件支臂端安装的弹性轴承承载较大的载荷而产生变形破坏,试验中轴承、螺栓等陪试部件破坏频率较高[20],统计结果见表7。再加上为了保证载荷精度而采用较低的试验频率(试验频率为0.1~0.15 Hz),导致试验运行的连续性较差,试验周期延长,直接影响了型号的研制进度。

表7 共轴旋翼无人直升机中央件疲劳试验陪试件破坏情况Tab.7 Damage of accompanying test parts in main rotor hub fatigue test for coaxial rigid rotor
3.3 解决办法
3.3.1 单旋翼中央件疲劳试验问题
离心力对挥舞力的“卸载”问题可以考虑在离心力加载端设计钢丝绳随动装置来补偿中央件桨盘因做周期性起伏运动带来的离心力加载角度变化,从而更加真实准确地模拟无人直升机主桨毂中央件在实际飞行状态下的承载和传力方式。
针对柔性梁假件上不同应变测量剖面挥舞弯矩相位差异问题,已经提出一种适用于单旋翼4 支臂桨毂构型无人直升机主桨毂中央件的疲劳试验载荷调试方法[10]。该方法的主要原理为,在恒定的离心力作用下,反复调试施加在柔性梁假件上的挥舞力和摆振力载荷,并结合数据采集系统,实时采集柔性梁假件上各测量剖面的动态弯矩数值,插值计算出中央件支臂对接面的动态弯矩数值,再折算出相应的弯矩幅值,并使其满足试验要求,简称数值插值调试法。前期试验结果表明,该法可以有效解决柔性梁假件上载荷测量剖面之间的相位差异问题,准确计算出中央件各支臂对接面实时动态弯矩,提高试验加载精度,保障主桨毂中央件在地面疲劳试验中模拟边界条件合理受载及传载,真实全面地考核中央件关键部位的疲劳性能,为其使用寿命评估和产品结构优化提供试验技术支撑。
3.3.2 共轴旋翼中央件疲劳试验问题
对于共轴旋翼中央件疲劳试验,因特殊桨毂构型及试验要求带来的“小载荷大位移”情况必然会影响试验加载频率、试验运行稳定性及载荷调试精度等。因此,可以考虑从以下几方面来解决上述问题。
1)改造升级液压控制系统,保证稳定的作动器执行机构压力输出,提高试验运行稳定性及加载频率。
2)调节计算机控制系统中PID 载荷调试参数,优化试验载荷输出和反馈加载波形的跟随性,提高试验加载精度。
3)定期检查试验件安装及试验运行状态,更换弹性轴承及连接螺栓等易损陪试件,在保证试验件准确受载的同时,降低陪试件的破坏率及载荷偏载率,提高试验运行效率,缩短试验周期,保障产品的研制进度。
通过采用局部改造液压系统,调节计算机控制系统中PID 载荷调试参数及定期更换弹性轴承等易损陪试件等措施进行优化调整,共轴旋翼中央件疲劳试验的试验频率和载荷精度得到了显著改善,统计结果见表8。

表8 优化调整后的共轴旋翼无人直升机中央件疲劳试验试验频率及载荷精度统计结果Tab.8 Statistical results about test frequency and loading accuracy in main rotor hub fatigue test for coaxial rigid rotor
4 结论
本文基于2 种不同旋翼构型无人直升机中央件的结构形式和承载特点,介绍了当前国内现代无人直升机中央件疲劳试验加载技术。同时,通过分析不同构型桨毂中央件疲劳试验中存在的问题,提出改进措施,并得到以下结论。
1)单旋翼式构型无人直升机中央件疲劳试验中,远端加载模式下,离心力对挥舞力的卸载影响较大,挥舞力理论值与实际施加值偏差较大,往往需要施加更大的挥舞力载荷才能达到中央件支臂对接面的挥舞弯矩载荷要求。
2)共轴旋翼构型无人直升机中央件疲劳试验中,虽然近端加载模式下,消除了离心力对挥舞力的卸载影响,但受旋翼桨毂结构、试验加载模型及液压控制设备等因素影响,挥舞力方向位移较大,支臂对接面试验载荷误差较大,小载荷大位移使得载荷精度不易控制。此外,较大的挥舞力加载位移,致使中央件支臂端安装轴承和螺栓等陪试部件频繁被破坏,部件更换工作也严重影响了试验运行的连续性和平稳性。
3)在单旋翼中央件疲劳试验中,关于离心力对挥舞力的卸载影响,可考虑在离心力加载端设计随动补偿装置,来优化抵消离心力卸载角θ。在共轴旋翼中央件疲劳试验中,可通过定期提前更换性能强化的轴承和螺栓,减少陪试件破坏频次,来保证试验的连续性和平稳性。另外,可通过降低试验频率、调节控制软件PID 参数及更换可提供稳定油源的液压设备等措施来保证载荷的稳定施加,从而提高试验载荷精度。
猜你喜欢
宁夏医科大学学报(2022年5期)2022-11-30
宁夏医科大学学报(2022年6期)2022-11-22
宁夏医科大学学报(2022年8期)2022-11-22
科技创新与应用(2022年2期)2022-01-14
水力发电(2021年1期)2021-04-15
水电站机电技术(2019年1期)2019-01-22
固体火箭技术(2018年6期)2019-01-18
商品与质量(2018年34期)2018-12-06
振动工程学报(2015年2期)2015-03-01
固体火箭技术(2014年3期)2014-03-15