
基于逐相旋转坐标变换的无刷直流电机转子磁场定向瞬时转矩控制技术
2022-12-03 10:03李珍国王鹏磊孙启航贾益丞
电工技术学报 2022年22期
李珍国 王鹏磊 孙启航 贾益丞
基于逐相旋转坐标变换的无刷直流电机转子磁场定向瞬时转矩控制技术
李珍国 王鹏磊 孙启航 贾益丞
(燕山大学电力电子节能与传动控制河北省重点实验室 秦皇岛 066004)
转子磁场定向无刷直流电机等效模型所具有的d轴转子磁链为恒值、q轴转子磁链始终为零的特征,是构建高性能无刷直流电机瞬时转矩控制系统的有利条件。但是传统的等功率3s/2r坐标变换无法使无刷直流电机得到转子磁场定向等效模型。为此,提出一种基于逐相旋转坐标变换的转子磁场定向方法,即对每相转子磁链逐一进行旋转坐标变换得到各相绕组的转子磁场定向等效模型,再以功率守恒为原则进行三相合成,得到无刷直流电机转子磁场定向等效模型。鉴于该转子磁场定向等效模型中电磁转矩仅与q轴电流成正比而与d轴电流无关,理论推导出直轴电枢反应磁动势、瞬时电磁转矩各自与d、q轴电流之间的关系式,构建了具有无增磁/去磁电枢反应的瞬时转矩控制系统。最后,通过Matlab仿真和DSP驱动实验,验证了所提控制技术的可行性和有效性。
无刷直流电机 转子磁场定向 逐相旋转坐标变换 无增磁和去磁 瞬时转矩控制
0 引言
无刷直流电机(Brushless DC Motor, BLDCM)因其结构简单、功率密度高、寿命长等优点,被广泛地应用于新能源汽车、医疗器械、航空航天等领域[1-3]。方波电流驱动方式凭借着实现简单、经济可靠等优点,在无刷直流电机控制系统中得到广泛应用,但是由于非理想反电动势的作用以及绕组电感的存在,使无刷直流电机在运行过程中普遍存在较大转矩脉动,其中换相转矩脉动最为严重,最大可达约50%的平均转矩[4],严重制约了其在高精度场合的推广和应用[5]。
国内外相关学者针对如何有效抑制无刷直流电机的转矩脉动进行了大量研究,主要从优化电机本体设计[6-7]和优化控制策略两方面出发来抑制无刷直流电机的转矩脉动。其中基于优化控制策略的措施主要包括换相期间与非换相期间采用不同的调制策略[8-10]、在逆变器前端添加辅助电路[11-14]等,其主要思想是平衡换相期间开通/关断相电流的变化速率,维持非换相相电流稳定。此外将直接转矩控制方法应用到无刷直流电机的控制系统中,也能够取得良好的转矩脉动抑制效果[15-17]。考虑到换相期间三相绕组均参与能量转换,一些学者将坐标变换的思想引入无刷直流电机的换相过程控制中[18-19]。基于a、b坐标系对换相过程的分析,文献[18]提出一种电压矢量注入方法,通过注入与换相时刻反电动势矢量同向或反向的电压矢量,使换相期间的电流矢量切换轨迹正交于反电动势矢量,达到减小换相转矩脉动的目的;文献[19]也从Clarke变化入手,将换相过程的控制转化为ab坐标系下两轴电流分量的控制,分别作用于转矩和换相时间,能够实现快速平稳换相。无刷直流电机控制系统的主电路一般采用三相电压型逆变器,除方波电流驱动方式外,在不改变逆变器拓扑结构的前提下,也可以采用三相导通方式驱动电机运行。具体选用何种驱动方式主要由无刷直流电机需要的性能决定。越来越多的研究发现,三相导通方式不仅不存在换相问题,而且在改善电机运行性能方面同样具备优势[20-24]。文献[20]分析了正弦波电流驱动方式对无刷直流电机机械特性和转矩性能的影响,结果表明,在高速区运行时正弦波电流驱动相比于方波电流驱动表现出更“硬”的机械特性;文献[21]采用高次谐波电流注入的方法来选择性地消除转矩中的谐波分量,从而减小转矩脉动,但该方法需要对反电动势进行傅里叶级数分解,较为复杂。为了避免复杂的复指数分解,一些学者提出从矢量的角度对无刷直流电机的运行过程进行分析。文献[22]以转矩脉动最小为控制目标,根据在ab坐标系下得到的理想反电动势矢量轨迹,通过让参考电流矢量对齐反电动势矢量来得到最优参考电流;文献[23]通过推导dq旋转坐标系下转矩和绕组铜耗各自与d、q轴电流之间的表达式,利用拉格朗日定理直接求解出给定转矩下的最小电流矢量,抑制转矩脉动的同时也降低了绕组铜耗,但该控制方法未能做到d、q两轴之间的转矩解耦;文献[24]以绕组变换前后产生的电磁转矩和直轴电枢反应不变为依据,把三相绕组电流变化为d、q轴电流,分别用于控制直轴电枢反应和转矩,但并未给出直轴电枢反应模型。
本文提出一种基于逐相旋转坐标变换的无刷直流电机转子磁场定向瞬时转矩控制技术。该技术首先通过对每相绕组单独进行旋转坐标变换得到无刷直流电机的转子磁场定向等效模型。其次,在该转子磁场定向dq旋转坐标系下,根据电磁转矩仅与q轴电流成正比而与d轴电流无关的特点,理论推导出直轴电枢反应磁动势、瞬时电磁转矩各自与d、q轴电流之间的关系式,并以此构建了无刷直流电机转子磁场定向瞬时转矩控制系统。所提控制技术不存在换相过程和状态切换,具有较强的适应性和灵活性,并通过相应的Matlab仿真和DSP驱动实验,验证了其可行性和有效性。
1 转子磁场定向下无刷直流电机的等效模型
图1给出了无刷直流电机三相静止坐标系和转子磁场定向dq同步旋转坐标系下的等效模型示意图。图中,A、B、C轴分别处于三相绕组轴线方向;d轴始终置于转子永磁体N极所指方向,也是d轴绕组轴线方向;q轴始终置于空间上超前d轴90°电角度方向,也是q轴绕组轴线方向;d、q轴随转子永磁体同步旋转;为以A相绕组轴线为参考的当前时刻转子磁场位置角。由图1可知,在转子旋转过程中,无刷直流电机转子磁场定向dq同步旋转坐标系下的等效模型总是具有转子永磁体磁场与d轴绕组交链的转子磁链d恒为最大值、q轴绕组交链的转子磁链q始终为0的特征。
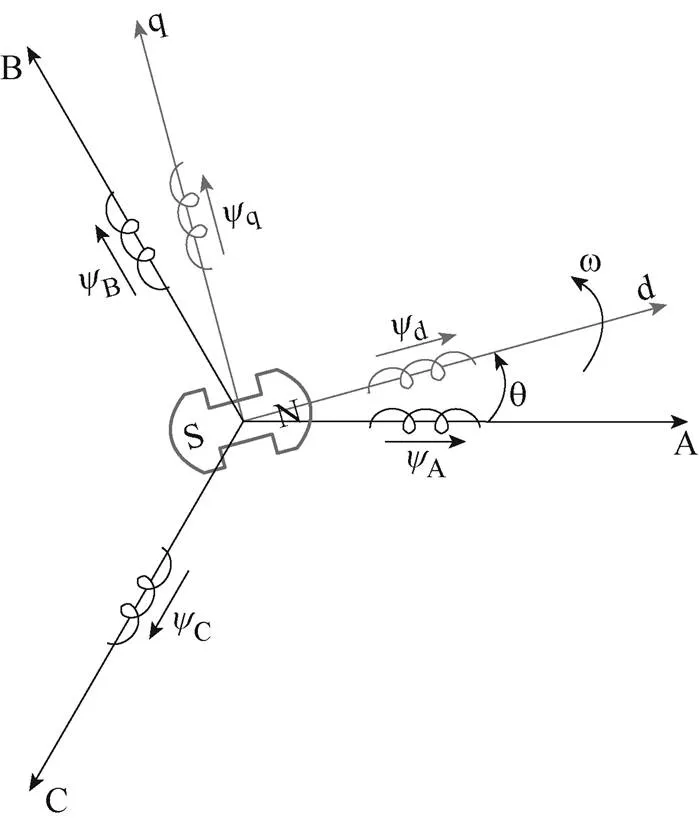
图1 三相静止坐标系与转子磁场定向dq同步旋转坐标系等效模型示意图
理想情况下,无刷直流电机转子永磁体产生的磁场沿定子内表面呈梯形波分布,导致在转子旋转过程中,其与A、B、C相绕组分别交链的转子磁链A、B、C为非正弦波。采用传统等功率3s/2r坐标变换矩阵,将该三相转子磁链坐标变换至d、q两轴转子磁链,则有
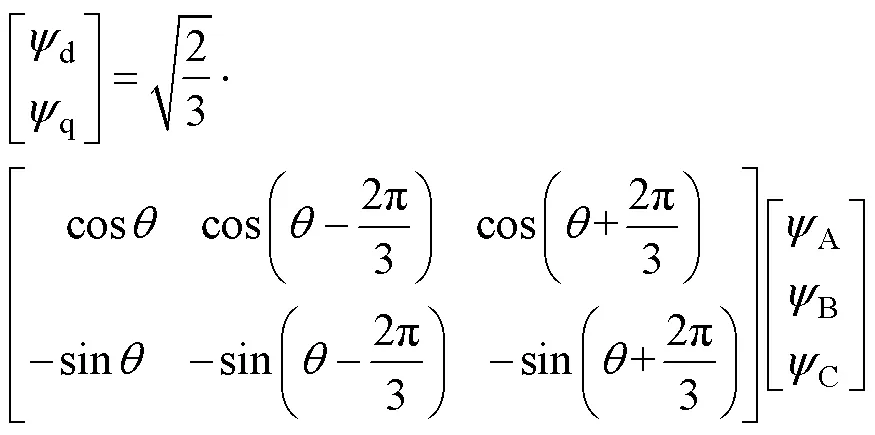
图2给出了理想梯形波磁场分布下的无刷直流电机三相转子磁链波形及通过式(1)得到的d、q轴转子磁链波形。图中,max表示转子永磁体磁场与每相绕组交链的转子磁链的最大值。由图2可知,采用式(1)中传统的等功率3s/2r坐标变换得到的d轴转子磁链d大小非恒定、q轴转子磁链q大小不等于0。显然,该两轴磁链特征与图1中转子磁场定向dq同步旋转坐标系下的两轴磁链特征不相符。由此可知,采用传统的等功率3s/2r坐标变换不能实现无刷直流电机转子磁场定向。
图2 理想梯形波磁场分布下三相转子磁链波形和d、q轴转子磁链波形
Fig.2 Three-phase rotor flux linkage waveform and d、q axis rotor flux linkage waveform under ideal trapezoidal wave magnetic field distribution
2 基于逐相旋转坐标变换的转子磁场定向瞬时转矩控制理论
2.1 逐相磁链旋转坐标变换
由前节分析可知,采用传统等功率3s/2r坐标变换不能实现无刷直流电机的转子磁场定向,其主要原因是无刷直流电机转子永磁体产生的磁场在空间上呈非正弦波分布,致使各相转子磁链为非正弦波的缘故。为此,本文拟采用一种逐相磁链旋转坐标变换来实现无刷直流电机转子磁场定向。



图3 坐标系与dA-qA旋转坐标系位置关系示意图
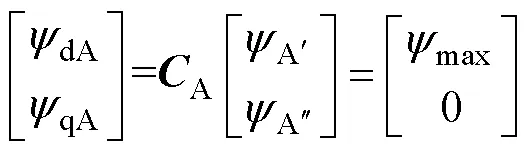
由式(5)可知,旋转变换至dA轴的转子磁链dA恒为max、qA轴的转子磁链qA始终为0。该两轴磁链特征与图1中转子磁场定向dq同步旋转坐标系下的两轴磁链特征相吻合。由此可知,建立的dAqA旋转坐标系与转子磁场定向dq同步旋转坐标系互相重合。
2.2 转子磁场定向dq同步旋转坐标系下的瞬时转矩方程
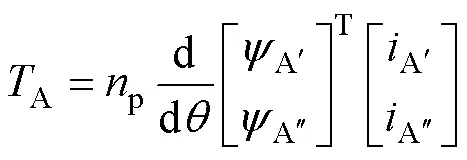

采用式(4)给出的坐标变换矩阵A,对式(6)进行坐标变换,可得到转子磁场定向dq同步旋转坐标系下的A相瞬时电磁转矩方程为

式(7)可进一步的表示为

式中,dA、qA分别为A相电流坐标变换至d、q轴后的电流;A为dA/d。
经推导,B、C相可得出类似结果,因此,A、B、C三相绕组在dq同步旋转坐标系下产生的合成瞬时电磁转矩大小为

式中,qB、qC分别为B、C相电流坐标变换至q轴后的电流;BC分别为dB/ddC/d;q为q轴绕组电流。
2.3 dq两轴电流对应三相绕组电流计算
由式(9)可知,若能够做到q为恒值则可以实现恒定瞬时转矩控制。根据式(9)中q与qA、qB、qC之间的关系,可对应得到d轴绕组电流d与dA、dB、dC之间的关系为

式中,dB、dC分别为B、C相电流坐标变换至d轴后的电流。
根据2.1节中给出的坐标变换矩阵,在已知dAqA、dBqB、dCqC旋转坐标系下的两轴电流时,能够直接利用各相坐标变换矩阵的逆矩阵逐相求解出A、B、C相绕组电流。因此,求解三相绕组电流的关键在于得到各相旋转坐标系下的两轴电流。
根据式(9)、式(10)及各轴电流之间的约束关系,可得
由式(11)可知,为了能够计算获得各相旋转坐标系下的两轴电流,须同时给出d、q轴绕组电流。其中,q可通过电磁转矩计算得到;d不参与产生电磁转矩,在恒定瞬时转矩控制中,作为一个额外的自由度可以给定为零,或根据其他控制需要得到。
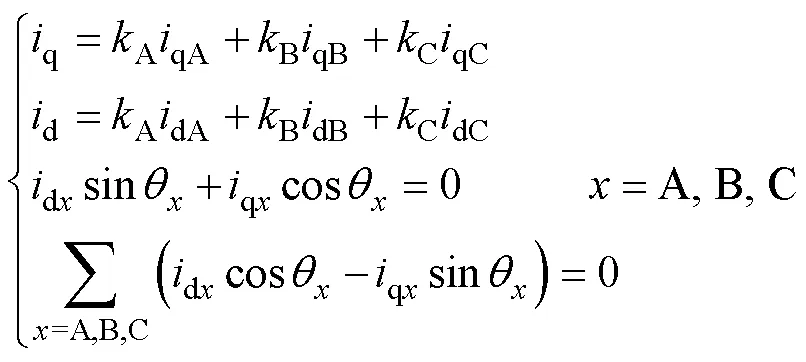
在已知d、q轴电流的前提下,由式(11),可得到A、B、C相旋转坐标系下的两轴电流与d、q轴绕组电流之间的关系为

其中
Ad=-BsinB+CsinCAq=BcosB-CcosC
Bd=-CsinC+AsinABq=CcosC-AcosA
Cd=-AsinA+BsinBCq=AcosA-BcosB
=AsinAAq+BsinBBq+CsinCCq
=AcosAAd+BcosBBd+CcosCCd
采用A、B、C的逆矩阵分别对A、B、C相旋转坐标系下的两轴电流进行坐标反变换,即可得到静止坐标系下的各相绕组电流大小为

由式(13)可知,完全可以把每相绕组中的电流分为两部分,与d有关的第1项定义为可调电流分量,与q有关的第2项定义为转矩电流分量,分别用id和iq表示。
2.4 d轴电流给定值计算
电机负载运行时,电枢绕组电流产生的电枢反应磁动势,其直轴分量直接对由转子永磁体磁场主导的气隙磁场起到增磁或去磁作用。若能够做到该直轴分量等于零,则既可以避免因增磁引起的磁路饱和,又能够避免转子永磁体失磁风险。由2.3节分析可知,在恒定瞬时转矩控制中,d作为一个额外的自由度,可以用来实现直轴电枢反应磁动势等于零,即无增磁和去磁控制。
当给定d=0时,可以做到每相绕组电流中仅存在转矩电流分量,但不一定能够实现直轴电枢反应磁动势等于零。其理由如下:当三相绕组中分别流过大小为Aq、Bq、Cq的三相电流时,各相绕组电流产生的电枢反应磁动势在空间上按余弦规律分布,其大小为
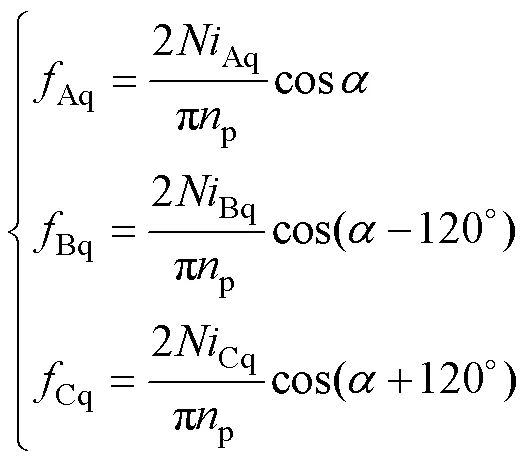
式中,Aq、Bq、Cq分别为Aq、Bq、Cq产生的电枢反应磁动势;为沿气隙圆周的角度;为每相绕组的有效串联匝数。
以各相绕组轴线方向作为Aq、Bq、Cq的空间矢量方向,对该三相磁动势进行空间矢量合成可得到三相合成磁动势,并将该合成磁动势投影到d轴即可得到直轴磁动势d1大小为

其中
11=Aqcos+Bqcos(-120°)+Cqcos(+120°)
图4给出了d=0时,一个电周期内直轴磁动势d1的变化波形。由图4可知,d1大小非恒等于零,故d=0时,未能在任意转子位置下做到无增磁和去磁。在此基础之上,若通过灵活的给定d值使Ad、Bd、Cd产生的直轴电枢反应磁动势恰好能够抵消d1的增磁或去磁效果,即可在任意转子位置下实现无增磁和去磁控制。

图4 id=0条件下的直轴磁动势
同理,当三相绕组中分别流过大小为Ad、Bd、Cd的三相电流时,该三相绕组电流产生的合成磁动势投影到d轴后的直轴磁动势d2大小为

式中
12=Adcos+Bdcos(-120°)+Cdcos(+120°)
若要在任意转子位置下实现无增磁和去磁控制,须满足d1+d2=0,定义r为d、q轴电流的比例系数,则此时的r满足
图5给出了恒转矩控制条件下,无增磁和去磁时所需的d轴电流波形及通过式(13)求得的三相电流波形。由图5可知,为了在任意转子位置下做到无增磁和去磁,逆变器需要工作在三相导通方式。
根据图5中的三相电流波形特点,可将一个周期的转子位置划分成Ⅰ~Ⅵ六个扇区,如图5所示,在每个扇区范围内,三相电流总是具有一相电流大小近似不变且方向与其他两相电流相反的特点。
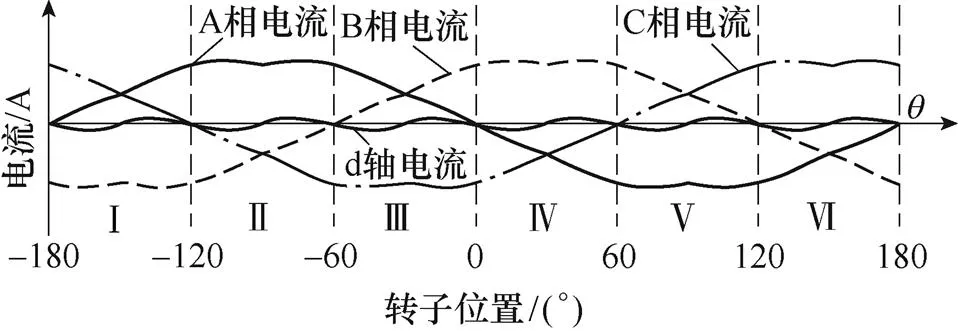
图5 无增磁和去磁控制所需的d轴电流和三相电流
3 转子磁场定向瞬时转矩控制系统的构建
基于以上理论分析,构建了如图6所示的无刷直流电机转子磁场定向瞬时转矩控制的整体系统框图。控制系统主要由三相电流参考值计算单元、扇区判断单元、组合电流/组合参考电流计算单元、电流PI控制器、转速计算单元、占空比补偿单元、开关管状态查询表和电压型功率变换电路等组成。

图6 整体系统框图
除此之外,为减少三相导通过程中进行脉宽调制的开关管数量,根据图5中每个扇区范围内的三相电流波形特点,取电流大小近似不变相的相电流与剩余两相电流做差得到新的两相组合电流分别记为M相、T相,由于M相、T相电流与A、B、C相电流之间存在固定的对应关系,故可由两相组合电流闭环控制取代三相电流闭环控制。



表1 各扇区电流组合和开关管状态查询表
4 仿真与实验验证
为了验证本文所提控制方法的有效性,将一台5对极的三相无刷直流电机用作仿真和实验电机。仿真采用Matlab M-file文件,参数依据实验电机参数给定,搭建的以TMS320F28335为控制核心的无刷直流电机控制实验系统,如图7所示。仿真和实验验证中电机的主要参数见表2,主电路中直流母线电压为300V,开关管的开关频率为20kHz,电流采样和控制周期均为50ms,实验中的电机负载为转矩大小可调节的磁滞测功机。
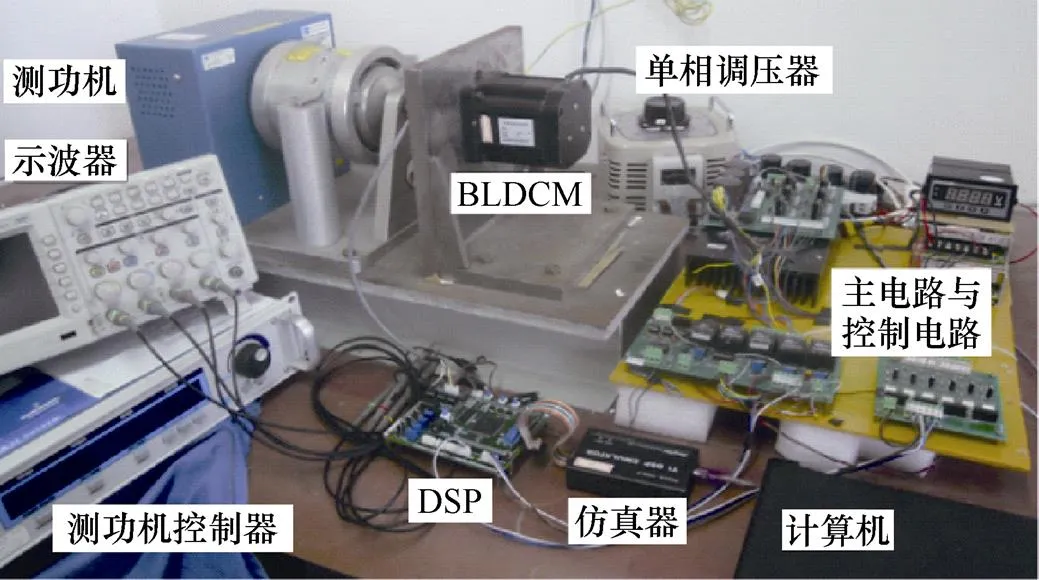
图7 无刷直流电机控制实验系统


表2 无刷直流电机参数
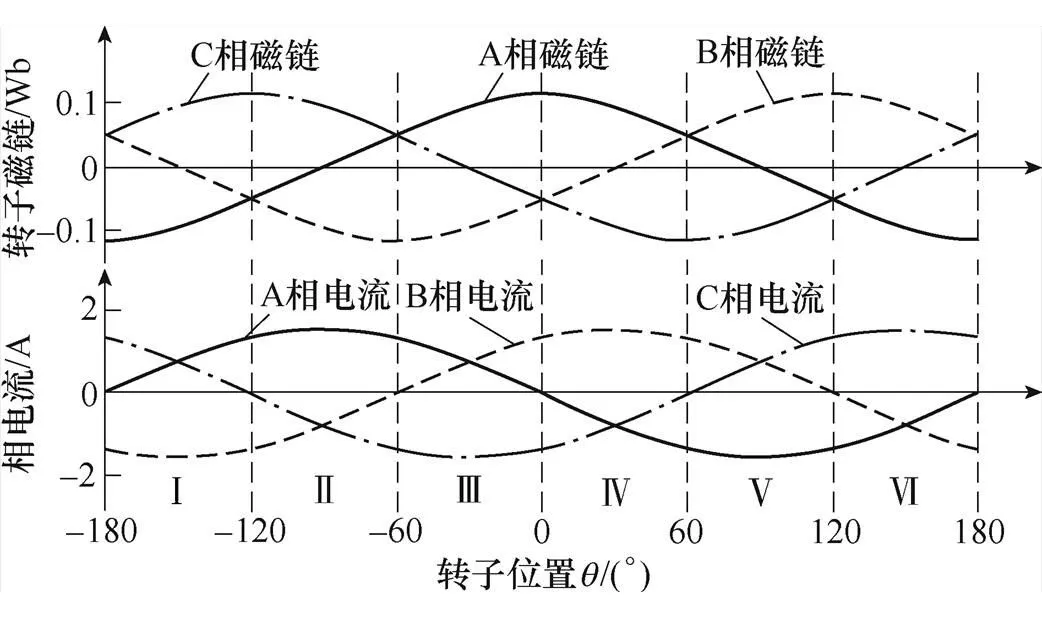
图8 实际的三相转子磁链和无增磁去磁控制所需三相电流波形
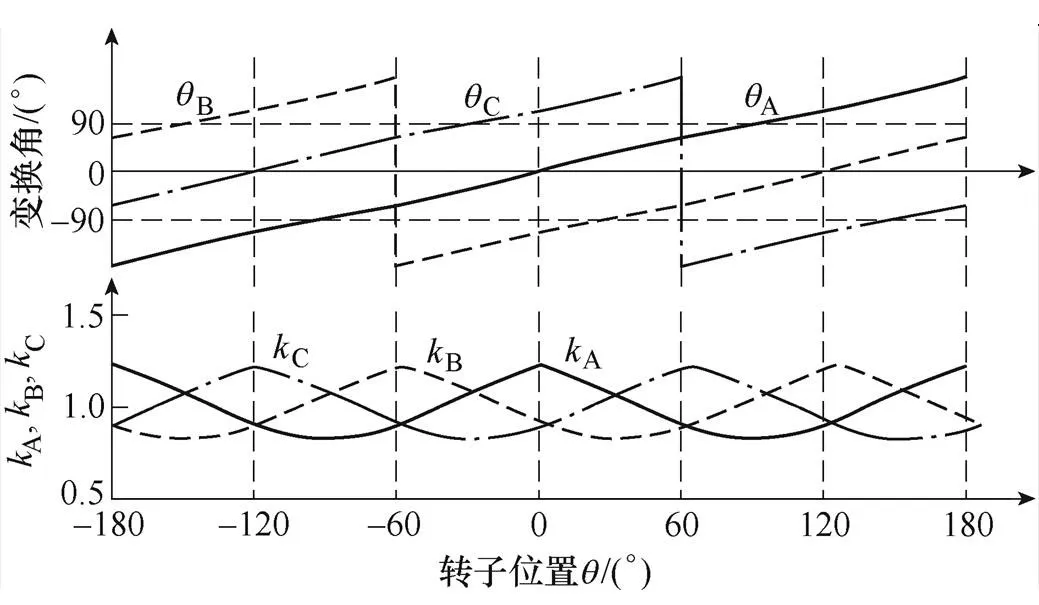
图9 旋转变换角qA、qB、qC和kA、kB、kC
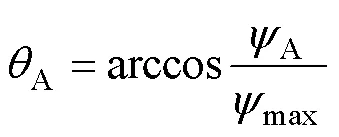

图10、图11分别给出了额定转矩(1.27N×m)负载运行状态下,转速为600r/min时的仿真波形和实验波形。仿真和实验中所用到的控制框图如图6所示,q轴参考电流与三相参考电流之间的计算系数数据库通过预先离线实验得到,各扇区下的开关管状态查询表已在表1中给出。作为仿真结果给出了实际转矩和参考转矩、三相实际相电流和参考相电流及相电压;作为实验结果给出了实际转矩、A相参考电流和实际电流、A相电压和上桥臂开关管驱动信号。仿真和实验中给出的相电压大小均为主电路逆变器三相引出线相对于母线负极的电压。

图10 600r/min下的仿真结果(额定转矩)


图11 600r/min下的实验结果(额定转矩)
图12给出了额定转矩(1.27N×m)负载运行状态下,转速为600r/min时的A相参考电流和实际电流、A相电流跟踪误差和相电压波形。由图12可知,电流相对误差最大约为10%,实际电流的跟踪性能良好,表明实验电机实现了无直轴电枢反应控制。

图12 600r/min下的A相参考电流和实际电流、跟踪误差及A相电压(额定转矩)
为了验证本文所提控制方法的动态特性,图13和图14分别给出了转速为1 200r/min运行条件下,转矩由轻载(0.2N×m)阶跃变化到额定转矩(1.27N×m)再阶跃变化到轻载时的仿真波形和实验波形。仿真结果给出了实际转矩和参考转矩、三相实际电流和参考电流及相电压;实验结果给出了实际转矩、A相参考电流和实际电流及A相电压。由图13、图14可知,由轻载阶跃变化到额定转矩时,实际转矩仍可以良好地跟踪参考转矩,转矩并没有出现较大脉动,实验中,稳定状态下的转矩脉动约为10%;在由额定转矩阶跃变化到轻载时,虽然实际转矩稍有滞后,但整体的跟踪控制效果良好。
图13 1 200r/min下的仿真结果(阶跃参考转矩)

图14 1 200r/min下的实验结果(阶跃参考转矩)
5 结论
考虑到传统的3s/2r坐标变换无法得到无刷直流电机的转子磁场定向等效模型,本文提出了一种基于逐相旋转坐标变换的无刷直流电机转子磁场定向瞬时转矩控制技术,并得出以下结论:
1)针对非正弦的三相转子磁链,通过对每相绕组单独进行旋转坐标变换,再以功率守恒为原则进行三相合成,可获得无刷直流电机转子磁场定向dq旋转坐标系下的等效模型。
2)转子磁场定向dq旋转坐标系下,能够做到d、q两轴之间的转矩解耦。其中,q轴电流用于实现恒定瞬时转矩控制;d轴电流可用于实现其他控制目标,如无增磁/去磁的电枢反应等。
3)所提的转子磁场定向瞬时转矩控制技术,不存在换相过程和状态切换;不需要添加额外的硬件电路,具有较强的实用性和灵活性。
[1] 边春元, 邢海洋, 李晓霞, 等. 基于速度变化率的无位置传感器无刷直流电机风力发电系统换相误差补偿策略[J]. 电工技术学报, 2021, 36(11): 2374-2382.
Bian Chunyuan, Xing Haiyang, Li Xiaoxia, et al. Compensation strategy for commutation error of sensorless brushless DC motor wind power generation system based on speed change rate[J]. Transactions of China Electrotechnical Society, 2021, 36(11): 2374- 2382.
[2] Jahns T M, Soong W L. Pulsating torque minimi- zation techniques for permanent magnet AC motor drives-a review[J]. IEEE Transactions on Industrial Electronics, 1996, 43(2): 321-330.
[3] de Castro A G, Guazzelli P R U, dos Santos S T C A, et al. Zero sequence power contribution on BLDC motor drives. part I: a theoretical investigation[C]// 2018 13th IEEE International Conference on Industry Applications, Sao Paulo, Brazil, 2018: 1016-1023.
[4] 谭建成. 永磁无刷直流电机技术[M]. 北京: 机械工业出版社, 2011.
[5] Fang Jiancheng, Li Haitao, Han Bangcheng. Torque ripple reduction in BLDC torque motor with nonideal back EMF[J]. IEEE Transactions on Power Elec- tronics, 2012, 27(11): 4630-4637.
[6] 林黄达, 程思为, 王东, 等. 环形绕组无刷直流电机的换向过程分析及建模[J]. 电工技术学报, 2020, 35(8): 1603-1612.
Lin Huangda, Cheng Siwei, Wang Dong, et al. Analytical modeling of the circular winding brushless DC motor under load commutation[J]. Transactions of China Electrotechnical Society, 2020, 35(8): 1603- 1612.
[7] 贾喆武, 张庆湖, 王东. 环形绕组无刷直流电机的四象限运行分析[J]. 电工技术学报, 2020, 35(18): 3821-3829.
Jia Zhewu, Zhang Qinghu, Wang Dong. Analysis on 4-quadrant operation of circular winding brushless DC motor[J]. Transactions of China Electrotechnical Society, 2020, 35(18): 3821-3829.
[8] 林平, 韦鲲, 张仲超. 新型无刷直流电机换相转矩脉动的抑制控制方法[J]. 中国电机工程学报, 2006, 26(3): 153-158.
Lin Ping, Wei Kun, Zhang Zhongchao. A novel control scheme to suppress the commutation torque ripple in BLDCM[J]. Proceedings of the CSEE, 2006, 26(3): 153-158.
[9] 王大方, 卜德明, 朱成, 等. 一种减小无刷直流电机换相转矩脉动的调制方法[J]. 电工技术学报, 2014, 29(5): 160-166.
Wang Dafang, Bu Deming, Zhu Cheng, et al. A modulation method to decrease commutation torque ripple of brushless DC motors[J]. Transactions of China Electrotechnical Society, 2014, 29(5): 160- 166.
[10] 李珍国, 王江浩, 高雪飞, 等. 一种合成电流控制的无刷直流电机转矩脉动抑制系统[J]. 中国电机工程学报, 2015, 35(21): 5592-5599.
Li Zhenguo, Wang Jianghao, Gao Xuefei, et al. Torque ripple reduction systems for brushless DC motors with resultant current control[J]. Proceedings of the CSEE, 2015, 35(21): 5592-5599.
[11] 夏鲲, 朱琳玲, 曾彦能, 等. 基于准Z源网络的永磁无刷直流电机换相转矩脉动抑制方法[J]. 中国电机工程学报, 2015, 35(4): 971-978.
Xia Kun, Zhu Linling, Zeng Yanneng, et al. Researches on the method of suppressing com- mutation torque ripple for brushless DC motors based on a quasi-Z-source net[J]. Proceedings of the CSEE, 2015, 35(4): 971-978.
[12] Chen Wei, Liu Yapeng, Li Xinmin, et al. A novel method of reducing commutation torque ripple for brushless DC motor based on Cuk converter[J]. IEEE Transactions on Power Electronics, 2017, 32(7): 5497-5508.
[13] 姚绪梁, 赵继成, 王景芳, 等. 一种基于辅助升压前端的无刷直流电机换相转矩脉动抑制方法研究[J]. 中国电机工程学报, 2020, 40(9): 3021-3030.
Yao Xuliang, Zhao Jicheng, Wang Jingfang, et al. Research on suppressing commutation torque ripple of brushless DC motor based on an auxiliary step-up front end[J]. Proceedings of the CSEE, 2020, 40(9): 3021-3030.
[14] 曹彦飞, 陆海天, 李新旻, 等. 基于无电感升压拓扑的无刷直流电机电流控制策略[J]. 电工技术学报, 2021, 36(6): 1249-1258.
Cao Yanfei, Lu Haitian, Li Xinmin, et al. Current control strategy of brushless DC motor based on non-inductive Boost topology[J]. Transactions of China Electrotechnical Society, 2021, 36(6): 1249- 1258.
[15] Liu Yong, Zhu Z Q, Howe D. Commutation-torque- ripple minimization in direct-torque-controlled PM brushless DC drives[J]. IEEE Transactions on Industry Applications, 2007, 43(4): 1012-1021.
[16] Shi Tingna, Cao Yanfei, Jiang Guokai, et al. A torque control strategy for torque ripple reduction of brushless DC motor with nonideal back electromotive force[J]. IEEE Transactions on Industrial Electronics, 2017, 64(6): 4423-4433.
[17] 李珍国, 章松发, 周生海, 等. 考虑转矩脉动最小化的无刷直流电机直接转矩控制系统[J]. 电工技术学报, 2014, 29(1): 139-146.
Li Zhenguo, Zhang Songfa, Zhou Shenghai, et al. Direct torque control of brushless DC motor considering torque ripple minimization[J]. Transa- ctions of China Electrotechnical Society, 2014, 29(1): 139-146.
[18] 陆可, 蔡广瀚, 向南辉, 等. 基于电压矢量注入的无刷直流电机换相转矩脉动抑制方法[J]. 中国电机工程学报, 2021, 41(10): 3592-3601.
Lu Ke, Cai Guanghan, Xiang Nanhui, et al. Method for suppressing commutation torque ripple of brush- less DC motor based on voltage vector injection[J]. Proceedings of the CSEE, 2021, 41(10): 3592-3601.
[19] Jiang Weidong, Huang Hui, Wang Jinping, et al. Commutation analysis of brushless DC motor and reducing commutation torque ripple in the two-phase stationary frame[J]. IEEE Transactions on Power Electronics, 2017, 32(6): 4675-4682.
[20] Bertoluzzo M, Buja G, Keshri R K, et al. Sinusoidal versus square-wave current supply of PM brushless DC drives: a convenience analysis[J]. IEEE Transa- ctions on Industrial Electronics, 2015, 62(12): 7339- 7349.
[21] Le-Huy H, Perret R, Feuillet R. Minimization of torque ripple in brushless DC motor drives[J]. IEEE Transactions on Industry Applications, 1986, IA- 22(4): 748-755.
[22] Buja G, Bertoluzzo M, Keshri R K. Torque ripple-free operation of PM BLDC drives with petal-wave current supply[J]. IEEE Transactions on Industrial Electronics, 2015, 62(7): 4034-4043.
[23] Khazaee A, Zarchi H A, Markadeh G R A. Real-time maximum torque per ampere control of brushless DC motor drive with minimum torque ripple[J]. IEEE Transactions on Power Electronics, 2020, 35(2): 1194-1199.
[24] 李珍国, 孙启航, 王鹏磊, 等. 基于转子永磁体磁场定向的无刷直流电机转矩脉动抑制[J]. 电工技术学报, 2020, 35(14): 2987-2996.
Li Zhenguo, Sun Qihang, Wang Penglei, et al. Torque ripple reduction of brushless DC motor based on rotor permanent magnet field orientation[J]. Transactions of China Electrotechnical Society, 2020, 35(14): 2987-2996.
Rotor Field Oriented Instantaneous Torque Control Technology of Brushless DC Motor Based on Per-Phase Rotating Coordinate Transformation
(Key Lab of Power Electronics for Energy Conservation and Motor Drive of Hebei Province Yanshan University Qinhuangdao 066004 China)
The equivalent model of a brushless DC motor (BLDCM) with the rotor field orientation has the characteristics that the d-axis rotor flux linkage is constant and the q-axis rotor flux linkage is zero. It isa favorable condition for building high-performance torque control systems. However, the traditional equal-power 3s/2r coordinate transformation cannot obtain the equivalent model of the rotor field orientation of BLDCM. Therefore, a rotor field orientation method based on per-phase coordinate transformation is proposed. That is, per-phase is transformed one by one to obtain the rotor field orientation equivalent model of per-phase winding, and then the three-phase is synthesized based on the principle of power conservation. Since the torque of the equivalent model is proportional to the q-axis current and independent of the d-axis current, the relationship between the d-axis armature reactive magnetomotiveforce, torque and the d- and q-axis currents is derived. Consequently, a BLDCM torque control system with non-magnetization/demagnetization is constructed. Finally, the feasibility and effectiveness of the proposed control technology are verified by Matlab simulation and DSP driving experiment.
Brushless DC motor (BLDCM), rotor field orientation, per-phase rotating coordinate transformation, without magnetization and demagnetization, instantaneous torque control
TM351
10.19595/j.cnki.1000-6753.tces.211495
国家自然科学基金资助项目(61873226)。
2021-09-23
2021-10-22
李珍国 男,1973年生,博士,副教授,研究方向为电力电子与电力传动。
E-mail: lzg@ysu.edu.cn(通信作者)
王鹏磊 男,1995年生,硕士研究生,研究方向为电力电子与电力传动。
E-mail: 1971545348@qq.com
(编辑 郭丽军)
猜你喜欢
大电机技术(2022年5期)2022-11-17
电工技术学报(2022年20期)2022-10-29
微电机(2022年8期)2022-10-12
汽车实用技术(2022年12期)2022-07-05
重庆理工大学学报(自然科学)(2022年5期)2022-06-18
传感器与微系统(2022年3期)2022-03-23
微电机(2022年1期)2022-03-21
微电机(2020年7期)2020-08-01
微特电机(2019年7期)2019-08-02
电子制作(2017年1期)2017-05-17
