
普速铁路列车追踪间隔时间计算方法研究
2022-12-02 11:48田长海赵建勋张守帅盛天一王亚楠
铁道学报 2022年11期
田长海,姜 博,赵建勋,张守帅,盛天一,王亚楠
(1.中国铁道科学研究院集团有限公司 研发中心, 北京 100081;2.中国铁道科学研究院 研究生部, 北京 100081;3.中国铁道科学研究院集团有限公司 通信信号研究所, 北京 100081;4.西南交通大学 交通运输与物流学院,四川 成都 611756;5.中国铁路上海局集团有限公司 新长车务段,江苏 南通 226601;6.中国铁路太原局集团有限公司 大同车务段,山西 大同 037005)
截至2021年底,我国普速铁路营业里程约11万km,占全国铁路总营业里程的73.3%,在全国铁路客货运输中发挥着极其重要的作用。随着我国经济的持续快速发展,普速铁路运量会持续增长,繁忙普速铁路运输能力仍比较紧张。列车间隔时间是编制列车运行图和计算铁路通过能力最基本最重要的参数,管好用好普速铁路,提高运输效率,与列车间隔时间密切相关。
近年来,随着普速铁路列车提速和列控系统的改进升级,既有列车间隔时间计算方法已不能准确反映铁路技术设备进步的状况。20世纪80年代发布的列车间隔时间相关技术标准[1]与当前铁路技术设备和运输组织方式脱节,许多教材、专著和论文未能把常用的普速铁路列车间隔时间计算公式完整准确描述出来[2-4],结合我国铁路技术设备发展情况,重新研究普速铁路列车间隔时间计算方法,对完善铁路运输组织基础理论、科学合理确定列车运行图间隔时间、合理计算普速铁路通过能力具有重要理论意义和现实作用。
1 列控系统对列车间隔时间计算方法的影响
列车间隔时间计算方法与闭塞设备、列控系统、行车规则、司机操纵等密切相关,其中司机操纵又受到列控系统的指导和影响,因此需要就不同阶段普速铁路列控系统对列车间隔时间计算方法的影响进行分析。
1.1 无列控系统
20世纪80年代以前,我国铁路还没有成型的列控系统[5],列车运行主要依靠司机确认地面信号机显示状态,根据规则凭经验操纵列车运行。为保证列车安全运行和司机舒适驾驶,人为规定列车运行时在空间上需间隔一定的固定距离。例如三显示自动闭塞区段列车追踪运行时,规定追踪列车由绿灯向绿灯追踪运行,使得列车在空间上至少间隔3个闭塞分区,见图1,列车区间追踪间隔时间计算方法为

图1 三显示自动闭塞区段列车区间追踪运行间隔的最小距离

(1)
式中:I追为列车区间追踪间隔时间,min;L闭1、L闭2、L闭3分别为连续3个闭塞分区长度,m;L列为列车长度,m;v区间为列车在这3个闭塞分区的平均运行速度,km/h。
1.2 速度分级控制列控系统
从1995年开始,列车运行监控装置LKJ-93投入使用[5],列车运行开始装备了一套较完善的安全控制设备。LKJ-93采用速度分级控制模式,规定了黄灯限速值,有的甚至规定了绿黄灯的限速值,以信号机出口速度作为目标点分段计算生成阶梯速度控制曲线,具有超速和冒进(出)信号防护功能,见图2。这种控车方式也要求前后追踪运行的列车在空间上必须至少间隔一定的固定距离。例如四显示自动闭塞区段黄灯有限速值要求,一般用2个闭塞分区完成列车从最高运行速度到0的制动,列车区间追踪最小空间间隔距离是4个闭塞分区,见图3,由此规定列车区间追踪间隔时间计算方法为
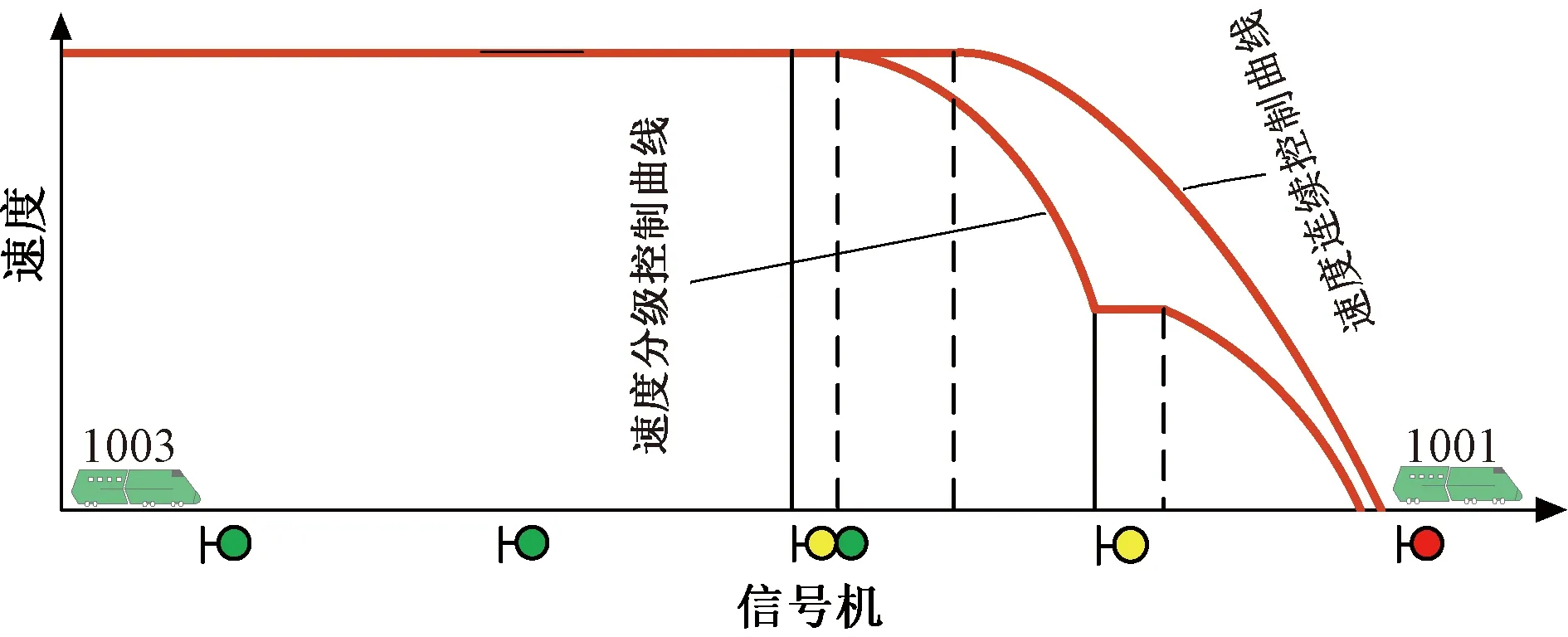
图2 LKJ速度分级控车与速度连续控车对比

图3 四显示自动闭塞区段列车区间追踪运行间隔的最小距离

(2)
式中:L闭4为第4个闭塞分区长度,m。
速度分级控制模式易于存在列车制动管风压充风不足、空走距离过长、行车效率偏低等弊端,但速度分级列控系统解决了我国铁路列车运行无控车系统的问题,在20世纪90年代我国列车运行速度普遍不高,同时受计算机技术水平等多因素条件限制,速度分级控制模式基本满足列车运行安全控制和运输需要[5]。
1.3 速度连续控制列控系统
随着列车运行速度的提高,对普速铁路列控系统提出了更高要求,计算机技术发展也为列控系统技术发展奠定了基础。2001年起LKJ-2000投入使用,实现了控车模式从速度分级控制向速度连续控制的转变[6-7]。速度连续控制模式,主要以列车运行前方信号机红色灯光为目标点,不再考虑其间的黄灯、绿黄灯限速要求,根据相关制动距离计算公式,计算生成一条连续平滑的速度控制曲线监控列车安全运行[8],见图2,防止列车越过关闭的信号机或超过限速值运行。该控制曲线长度与线路平纵断面条件、列车制动能力及其利用程度、设施设备限速有关,与单个闭塞分区长度无关(连续几个闭塞分区长度应满足一定距离要求)。与速度分级控制模式曲线相比,速度连续控制模式曲线只包含一个空走距离,在一定程度避免了列车充风不足引起制动力减弱的安全隐患,缩短了制动距离,从而压缩了列车追踪间隔时间,提高了通过能力。
根据速度连续控制模式,前后追踪运行的两列车空间上间隔的最小距离就不再是按闭塞分区间隔的固定数量,而是随列车运行速度、线路平纵断面条件、列车制动能力动态变化的,列车追踪运行就不存在三显示自动闭塞区段必须间隔3个闭塞分区、四显示自动闭塞区段就必须间隔4个闭塞分区的基础条件。在LKJ速度连续控制模式下,列车追踪运行时,列车区间追踪间隔时间是后行列车以前行列车所在闭塞分区入口附加一定的安全防护距离为追踪目标点,在满足目标制动距离条件下,后行列车正常运行而必须间隔的最短距离范围内的运行时间,见图4,列车区间追踪间隔时间计算方法为
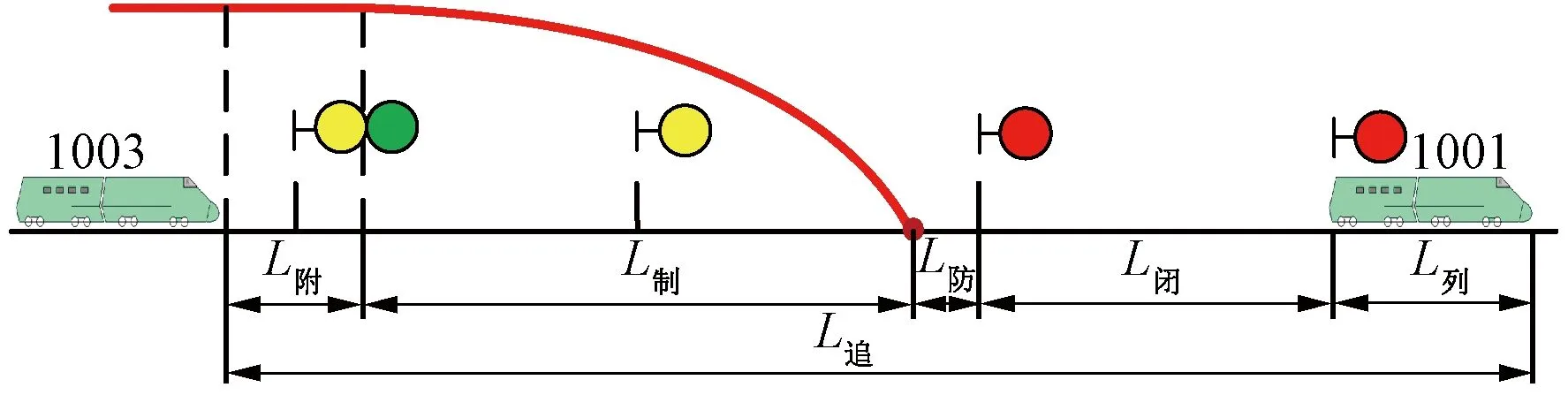
图4 LKJ速度连续控制模式下的列车区间追踪间隔距离

(3)
式中:L制为LKJ计算制动距离,m;L防为LKJ预留的安全距离,m;L闭为闭塞分区长度,m,在最不利条件下只考虑一个闭塞分区长度;t附为列车区间追踪运行的附加时间,min,是考虑列车在最紧密追踪情况下,轨道电路信息变化后LKJ接收、LKJ计算形成新的制动曲线显示在人机界面、司机确认监控曲线和地面信号机显示状态至采取控车措施等需要的时间。
1.4 综合分析
速度连续控制模式的列车追踪运行原理和计算公式,与高速铁路的CTCS-2/3级列控系统很相似[9-10],这是因为LKJ经过多年的应用和不断改进提高后,其功能和性能逐步完善,与CTCS-2/3级列控系统越来越接近[11-12]。从2017年开始,本务机车和速度为200~250 km/h动车组逐步换装LKJ-15。与LKJ-2000相比,LKJ-15性能进一步提高,装备了安全计算机,并通过了SIL 4级安全认证,见表1[6-8]。
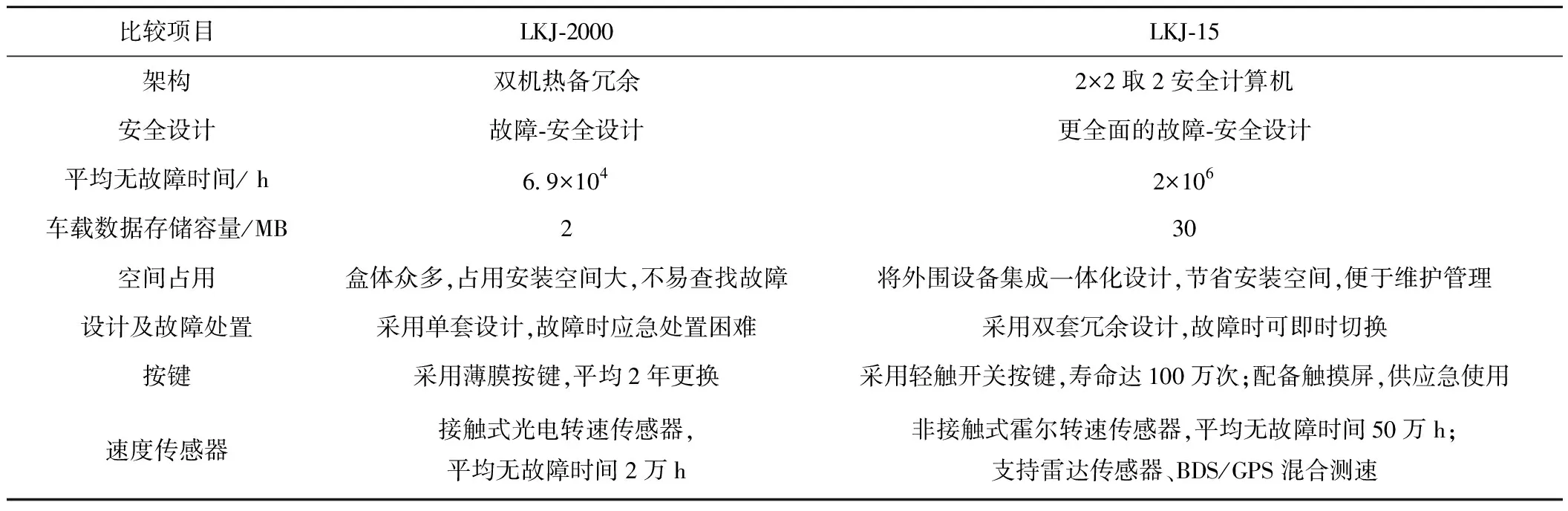
表1 LKJ-15与LKJ-2000技术性能比较
与CTCS-2/3级列控系统车载设备的显示可作为行车凭证不同,LKJ由于在列车定位、制动缓解、信息交换、通信等方面与CTCS-2/3级列控系统还有差距,还不能作为行车凭证,司机仍要看地面信号机显示行车。但LKJ-15的技术水平、可靠性以及普及程度均已具有相当高的水平,其测速测距误差不大于±1%,是监控列车运行和辅助司机驾驶的重要行车设备,和机车信号一同作为普速铁路不可或缺的标配的行车监控设备[13]。目前装备LKJ控车设备在黄灯、黄绿灯下已无限速值要求,它是否作为行车凭证与确定列车间隔时间计算方法没有必然的因果关系,而且列车间隔时间的计算应该反映不断改进完善的列控设备的运用成果,改变无控车设备条件下的传统计算方法。
基于上述理念,提出新的适用于当前普速铁路技术设备条件的列车追踪间隔时间计算方法[14-16]。
2 普速铁路列车追踪间隔时间计算方法
涉及普速铁路列车追踪间隔时间的类型很多,上文已详细分析I追的计算方法,下面仅讨论最常用的列车出发追踪间隔时间I发、列车到达追踪间隔时间I到和列车通过追踪间隔时间I通的计算方法。
2.1 列车出发追踪间隔时间I发
根据文献[13],自动闭塞区段出站信号机显示黄灯即可发出列车,这样出发列车最紧密追踪的条件是前行列车出清第一个闭塞分区后,就可办理后行列车出发作业时间,见图5,I发为

图5 列车车站出发追踪最小间隔距离

(4)
2.2 列车到达追踪间隔时间I到
根据信号联锁卡控条件,列车连续密集进站时,前行列车整列完全进入股道后,即可办理后行列车接车进路,为不影响后行列车正常运行,后行列车最近位置应在进站信号机外方一个LKJ计算制动距离再加一个安全距离处,见图6。I到为
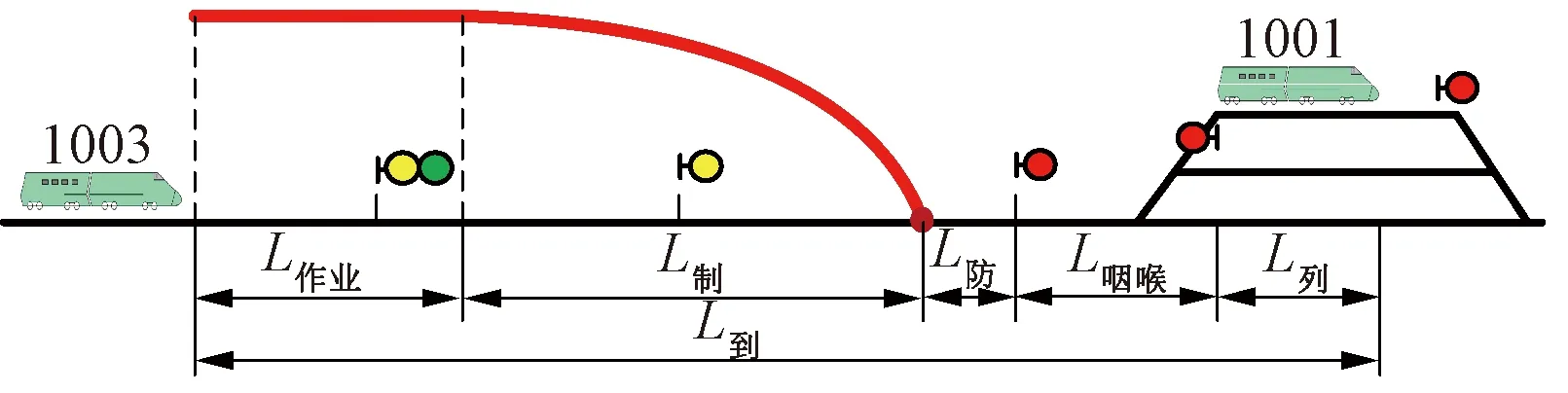
图6 列车到达追踪最小间隔距离

(5)


(6)

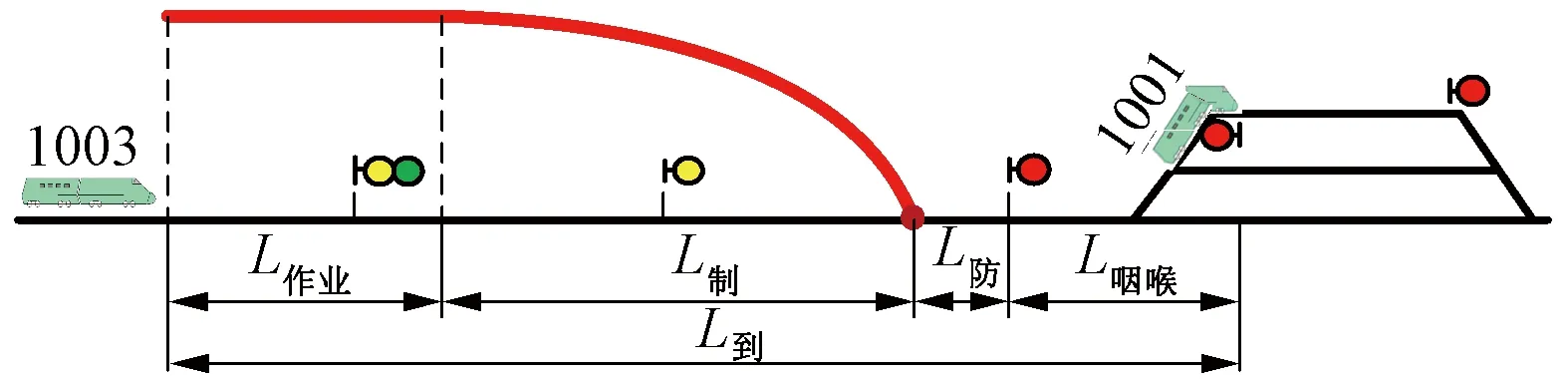
图7 延续进路条件下列车到达追踪最小间隔距离
2.3 列车通过追踪间隔时间I通
正常情况下,人工办理列车通过时应该是在出站信号机和进站信号机都具备开放条件办理,出站信号机具备开放条件至少是前行列车出清第一个闭塞分区,此时后行列车最近位置应在进站信号机外方一个LKJ计算制动距离再加一个安全距离处,见图8,I通为

图8 列车通过车站追踪最小间隔距离

(7)
比较图4和图8,不考虑前后列车速度差和办理进路作业时间差,I通比I追刚好多了1个闭塞分区长,导致I通往往比I追大。为缩短I通,在CTC自动触发进路条件下,当接车进路可办理、发车进路不能办理时,可先办理接车进路,这样可缩短列车通过追踪间隔时间,见图9,I通为

图9 出站信号机未开放条件下列车通过车站追踪最小间隔距离
(8)
在CTC自动触发进路条件下,当需要设置延续进路时,如果接车进路可办理、发车进路不能办理,可先办理接车进路,见图10,I通为

图10 出站信号机未开放且有延续进路条件下列车通过车站追踪最小间隔距离
(9)
3 普速铁路列车追踪间隔时间检算
根据上述公式,运用文献[8]规定的计算公式,根据文献[18]的要求,检算I追、I发、I到、I通,并进行对比分析。
3.1 参数取值
(1)线路、车站、信号设备
线路为平直道,双线自动闭塞,闭塞分区长度1 300 m,车站到发线有效长1 050 m,咽喉区长度考虑大型车站与中间站差距较大,取400、800 m两种方案;进路道岔考虑旅客列车进路配备12号道岔、货物列车进路有9号道岔的现实情况,侧向限速,旅客列车取45 km/h,货物列车取30 km/h,客货列车运行速度适当留有冗余。
(2)列车编组
选用160 km/h旅客列车和90 km/h货物列车。160 km/h旅客列车编组为1辆HXD3D+18辆25T型客车,列车质量1 067 t,列车全长482 m;90 km/h货物列车编组为1辆HXD2B+64辆C70型满重货车,列车质量6 000 t,列车全长918 m。
(3)办理进路作业时间

(4)制动距离计算方法
检算列车常用制动距离为[8]
L制=Sk+Se=
(10)
L防=A+0.5v0
(11)
式中:Sk为空走距离,m;Se为LKJ常用制动距离,m;A为安全距离基本值,常用制动区间取100 m;v0为制动初速度,km/h;vm为制动末速度,km/h;tk为空走时间,s;λ为制动计算系数;φh为闸瓦(闸片)换算摩擦系数;ϑh为列车换算制动率;βc为常用制动系数;ω0为列车单位基本阻力,N/kN;ij为制动地段加算坡度千分数。各项参数取值和计算方法在文献[8]均有明确规定,其中闸瓦(闸片)换算摩擦系数按文献[18]取值。
据此推算LKJ司机操纵速度曲线,根据司机操纵速度曲线的制动距离计算相关列车追踪间隔时间。
3.2 检算结果
3.2.1 司机操纵曲线的拟合
根据式(10)计算的LKJ常用制动曲线,是列车运行过程中不可触碰的曲线,见图11、图12中的红色曲线,列车运行速度达到该曲线就会触发常用制动。按照规定,在减速区,司机必须将列车运行速度控制在该曲线下方5 km/h以上才可避免列车发出报警信息。考虑式(10)设置了余量,再考虑留给司机一定的操纵余量,本文以常用制动曲线下方8 km/h来拟合司机操纵曲线,再用实际减压量进行牵引计算形成制动曲线,比较拟合的司机操纵曲线与多大减压量的制动曲线接近,评判拟合司机操纵曲线的合理性。评判合理后,就可以不超过司机操纵曲线的制动距离检算列车追踪间隔时间。
160 km/h旅客列车、90 km/h货物列车紧急制动、常用制动、司机操纵曲线对比见图11、图12(均按规定考虑了空走时间和距离),其中LKJ紧急制动曲线、常用制动曲线遵循文献[8]计算确定,司机操纵曲线是根据LKJ常用制动曲线下移8 km/h拟合形成的。不同减压量的常用制动曲线是根据文献[18]要求用牵引计算软件检算出来的。

图11 160 km/h旅客列车制动曲线与司机操纵曲线对比

图12 90 km/h货物列车制动曲线与司机操纵曲线对比
由图11、图12可见,拟合的160 km/h旅客列车司机操纵曲线制动距离(2 379 m)在减压量90 kPa(制动距离2 502 m)和100 kPa(制动距离2 317 m)制动曲线之间,拟合的90 km/h货物列车司机操纵曲线制动距离(1 656 m)在减压量70 kPa(制动距离1 862 m)和80 kPa(制动距离1 604 m)制动曲线之间,这一般都是列车正常制动操纵的减压量,表明按照上述逻辑拟合的司机操纵曲线基本合理。考虑一定冗余,160 km/h旅客列车采用90 kPa减压量、90 km/h货物列车采用70 kPa减压量的制动距离和时间检算列车追踪间隔时间。
3.2.2 列车追踪间隔时间检算
根据上述分析,运用理论公式、参数取值和牵引计算软件,即可检算列车追踪间隔时间。
(1)I追
客货列车区间运行速度按最高运行速度95%取值。
若采用既有固定间隔空间距离的计算方法,按式(2)计算可得
160 km/h旅客列车,I追=2 min 15 s
90 km/h货物列车,I追==4 min 18 s
若采用速度连续控车模式的计算方法,按式(3)计算可得
160 km/h旅客列车,I追=2 min 01 s
90 km/h货物列车,I追=3 min 13 s
计算结果表明,采用速度连续控制模式计算的列车区间追踪间隔时间比传统的固定间隔4个闭塞分区的计算结果小,其中160 km/h旅客列车的区间追踪间隔时间比四显示自动闭塞固定间隔4个闭塞分区计算结果小14 s,90 km/h货物列车比四显示自动闭塞固定间隔4个闭塞分区计算结果小1 min 05 s。
(2)I发
列车出发过程是列车运行速度逐渐变化的过程,因此运用牵引计算软件检算I发。检算过程中,旅客列车咽喉区限速不超过42 km/h、货物列车不超过27 km/h;假设站内L标取0,即停车点(标)与出站信号机位置重合。列车牵引计算结果见图13、图14,I发检算结果见表2。
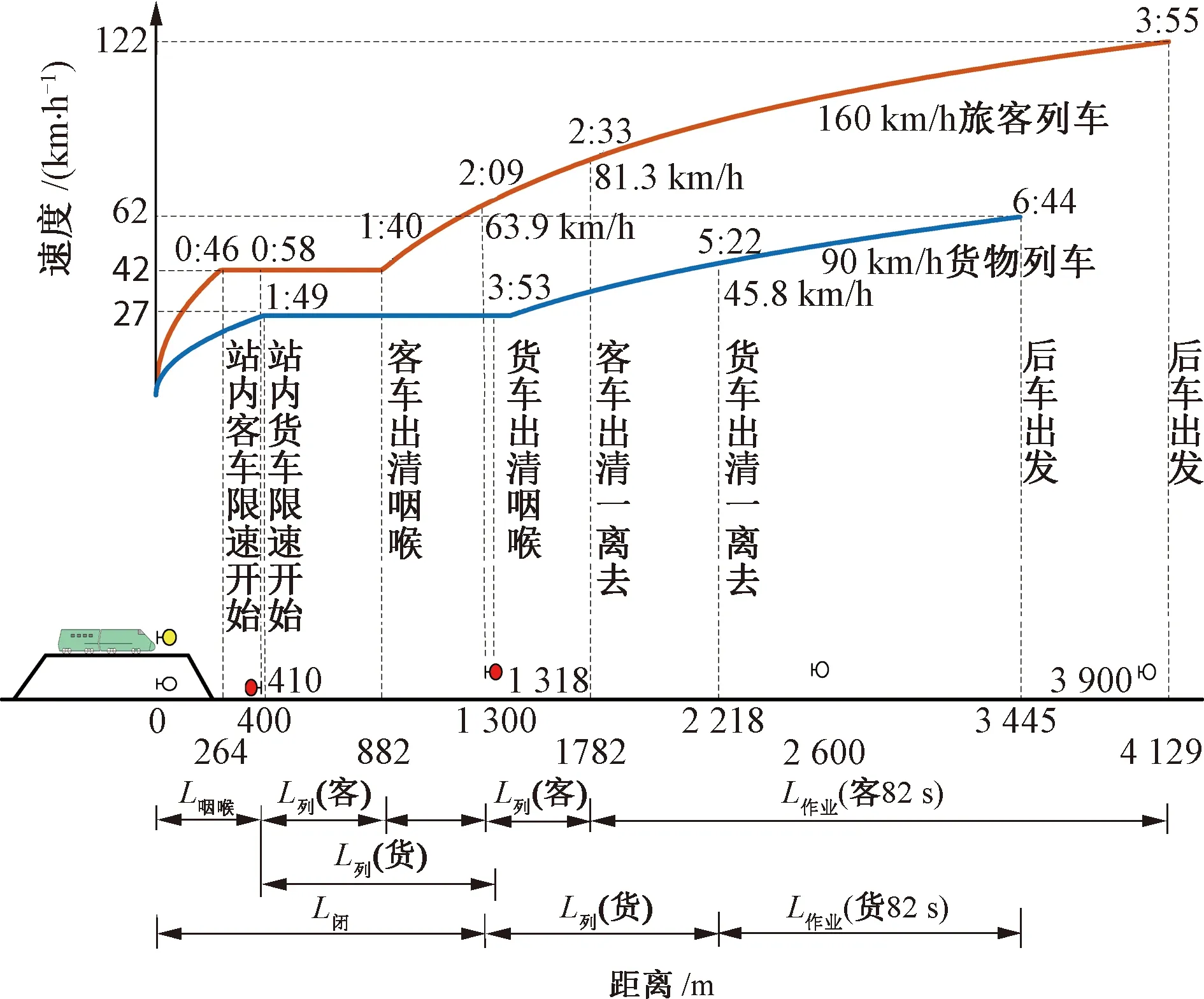
图13 咽喉区400 m时列车出发运行速度-时间-距离示意(时间单位:min:s)
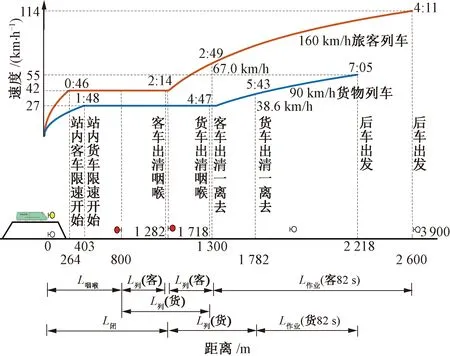
图14 咽喉区800 m时列车出发运行速度-时间-距离示意(时间单位:min:s)

表2 I发检算结果 min:s
牵引计算结果表明,I发与车站咽喉区长度及其限速有密切关系,咽喉区越长、咽喉区限速越低,I发越大;160 km/h旅客列车I发可实现5 min,90 km/h货物列车I发基本可实现7 min,咽喉区按800 m检算时,货物列车以不超过27 km/h速度至少走行了1 718 m,严重限制了货物列车追踪间隔时间,所以货物列车走行进路道岔也有必要采用12号,以提高侧向通过速度。列车出清一离去时速度远未达到正常速度,咽喉区长度400、800 m时,旅客列车速度为81.3、67.0 km/h,货物列车速度为45.8、38.6 km/h,这除了与咽喉区长度及其限速有关外,还与列车牵引能力有关,列车编组越多、重量越大,加速越困难,也影响I发。
(3)I到
列车进站到达追踪过程也是列车运行速度逐渐变化的过程。根据前面的分析,进站减速过程可以用简化后的给定减压量检算,采用牵引计算软件对160 km/h旅客列车减压量90 kPa、90 km/h货物列车减压量70 kPa的进站曲线进行检算。检算过程中,咽喉区、到发线和进站信号机外安全距离的实际限速,旅客列车不超过42 km/h、货物列车不超过27 km/h;L防按式(11)计算,160 km/h旅客列车L防=180 m,90 km/h货物列车L防=145 m。假设站内L标取0,即停车点(标)与出站信号机位置重合。列车牵引计算运行过程见图15、图16,I到检算结果见表3。

图15 咽喉区400 m时列车到达运行速度、时间、距离示意(时间单位:min:s)
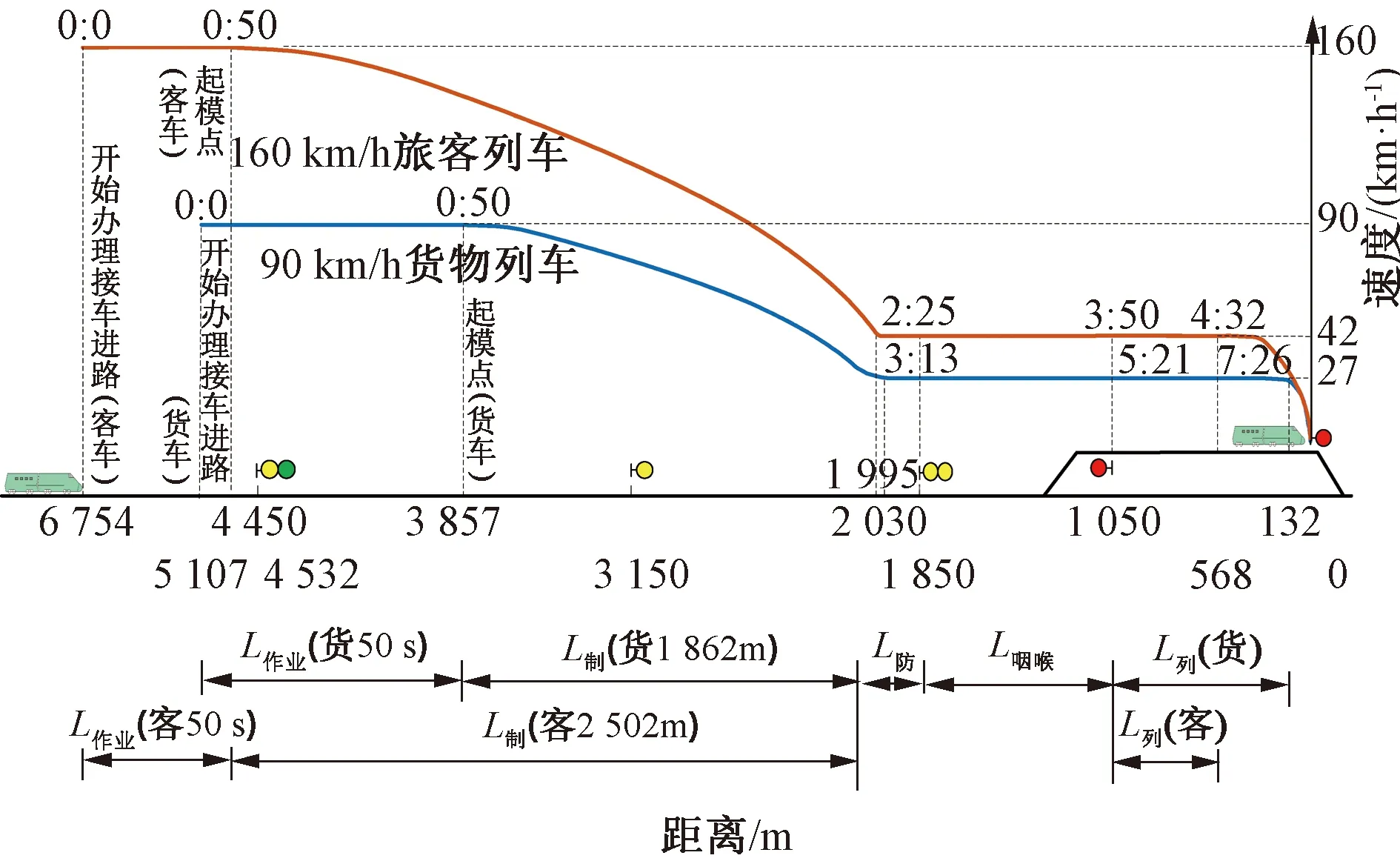
图16 咽喉区800 m时列车到达运行速度、时间、距离示意(时间单位:min:s)

表3 I到检算结果
牵引计算结果表明,无延续进路条件下,160 km/h旅客列车I到可实现5 min,90 km/h货物列车可实现6.5~7.5 min,咽喉区长度及其限速依然是影响I到的重要因素。当需要设置延续进路时,160 km/h旅客列车I到增加2 min以上,90 km/h货物列车I到增加近1 min。
(4)I通

表4 I通检算结果
计算结果表明,I通均大于I追,但均不超过5 min;90 km/h货物列车I通比160 km/h旅客列车大1 min 15 s~1 min 40 s。
4 结论与建议
列车间隔时间是编制列车运行图和计算铁路通过能力的重要参数,随着普速铁路LKJ控车设备的使用和性能的改进提高,列车间隔时间计算方法也需要进行相应变化。根据普速铁路列车目前使用的LKJ列控设备,提出了速度连续控制模式下列车区间追踪间隔时间I追、列车出发追踪间隔时间I发、列车到达追踪间隔时间I到、列车通过追踪间隔时间I通的计算方法,该方法突破了传统的列车必须间隔固定闭塞分区距离的理念而动态计算列车空间间隔距离,更适应目前普速铁路列控设备的发展现实。
为检算列车追踪间隔时间,采用有代表性的线路、车站、信号和列车编组等参数,根据文献[8]生成LKJ常用制动曲线,据此下浮8 km/h拟合形成司机操纵曲线,拟合的160 km/h旅客列车司机操纵曲线在减压量90 kPa和100 kPa制动曲线之间,拟合的90 km/h货物列车司机操纵曲线在减压量70 kPa和80 kPa制动曲线之间,表明考虑冗余情况下拟合的司机操纵曲线符合列车实际运行情况,在利用列车牵引计算软件检算列车追踪间隔时间时即可用相应减压量仿真牵引计算过程,实现列车追踪间隔时间的检算。
考虑冗余,检算I追、I到、I通时,L制取160 km/h旅客列车减压量90 kPa制动距离2 502 m,90 km/h货物列车减压量70 kPa制动距离1 862 m。I追检算结果表明,LKJ速度连续控车条件的I追比按固定闭塞分区距离计算的I追小,货物列车I追减小1 min以上。I追、I通均比I发、I到小,I到普遍比I发大,列车追踪间隔时间主要受I到限制;旅客列车I发、I到可以实现5 min,货物列车I发、I到在咽喉区400 m车站可实现7 min,在咽喉区800 m车站可实现7 min 30 s。缩短咽喉区长度、采用12号道岔提高货物列车侧向进出站速度、采用LKJ速度连续控车模式对压缩列车追踪间隔时间、提高线路通过能力均具有重要作用,按连续速度控制模式计算列车间隔时间的方法科学合理。
延续进路对列车间隔时间有较大影响,LKJ作为普速列车必备全程运转的控车设备,在其性能不断提高的条件下,设置延续进路的必要性值得重新探究,设置场景可大幅度减少。本文仅探讨了普速铁路的4种列车追踪间隔时间的计算方法,其他列车追踪间隔时间和列车车站间隔时间也都应当按连续速度控制模式计算。
猜你喜欢
铁道通信信号(2020年11期)2020-02-07
铁道通信信号(2020年7期)2020-02-06
铁道通信信号(2019年4期)2019-10-10
科技创新导报(2017年22期)2017-10-26
价值工程(2017年10期)2017-04-18
铁道通信信号(2016年5期)2016-06-01
科技创新导报(2014年29期)2014-12-02
铁路通信信号工程技术(2014年6期)2014-02-28
