
电力电子牵引变压器多模块载波移相同步控制策略研究
2022-12-02 11:49刘建强陈少勇史芸铭
铁道学报 2022年11期
赵 帅,刘建强,陈少勇,艾 宇,史芸铭
(北京交通大学 电气工程学院, 北京 100044)
相比于传统的工频牵引变压器,电力电子牵引变压器(Power Electronic Traction Transformer,PETT)具有体积小、质量轻等优点,并且能够显著提升系统的功率密度,改善电能质量,是下一代高速列车的核心部件[1-2]。在实际应用中,PETT通常采用模块化结构,其数字控制系统结构分为两种:集中式控制结构与分布式控制结构[3]。集中式控制结构采用主控制器完成所有单元的采样、计算与PWM脉冲产生[4]。集中式控制结构简单,但随着单元数量的增加,主控制器的负担加重,同时集中控制系统与各单元模块间大量的信号线与脉冲线连接会造成系统连接线多、可靠性差。分布式控制系统由主控制器和各个单元的分控制器组成,主控制器完成系统的计算与保护,分控制器完成各单元的采样、保护与脉冲产生[5-6]。分布式控制系统能够有效地减少主控制器的负担,同时减少主控制器的信号线数量,使系统易于模块化。考虑PETT的模块数量冗余性及系统的可扩展性,实际中PETT大多采用分布式数字控制系统结构。
输入侧采用级联H桥(Cascaded H-Bridge,CHB)变换器、输出侧采用并联双有源桥式(Dual Active Bridge,DAB)变换器的电路拓扑是目前常用的PETT主电路拓扑。对于级联H桥变换器,采用载波移相技术能够提高变换器的等效开关频率,降低网侧电流谐波含量[7],对于DAB变换器,采用载波移相技术能够提高系统输出电容电流等效开关频率,减小系统输出电压纹波,进而减小输出电容滤波器的体积,因此PETT通常均采用载波移相技术。在集中式数字控制系统中,所有单元的PWM脉冲全部由主控制器产生,所以只需将各单元载波的初始相位错开一定角度,即可实现载波移相[8]。在分布式数字控制系统中,各单元的PWM脉冲由各单元的分控制器产生,由于各分控制器的晶振时钟存在差异,在将各单元载波的初始相位错开一定角度的基础上,需要每隔一段时间对各单元的载波进行同步[9]。分布式控制系统中的载波同步方式主要有两种:①主控制器通过定时计数器产生同步脉冲,再将同步脉冲通过光纤发送到各分控单元,分控制器通过检测同步脉冲的边沿信号对各单元的载波计数值进行同步[10],这种同步方式几乎不依赖软件,但同步脉冲的传输需要额外增加光纤,并且这种方式增加了额外的中断,可能造成控制系统的时序混乱,影响系统的控制性能[5]。②由主控向分控发送同步信号,同步信号的传输与其他控制命令采用同一光纤[11-12],该方式无需增加额外的时钟和中断,且无需增加额外的光纤,在对分布式控制系统进行载波同步时得到普遍应用。然而,采用发送同步信号的方式对各单元载波进行同步时,由于分布式数字控制系统中普遍存在的通信时延问题[13],会导致同步信号传输存在一定误差,进而引起载波同步时载波计数器的跳变。对于级联H桥变换器,采用脉冲宽度调制方式,并且所有开关器件全部为硬开关,变换器的开关(载波)频率不高,载波计数器的跳变导致的PWM脉冲占空比的变化不会对CHB的运行造成影响,而对于DAB变换器,采用移相调制方式,原副边脉冲的占空比固定为50%[14],变换器的开关(载波)频率较高,载波计数器的跳变导致的PWM脉冲占空比与DAB移相值的变化将导致DAB电感电流突变与变压器偏磁,进而对PETT的安全运行造成危害。
为了保证电力电子牵引变压器中DAB变换器载波移相正常,能够准确、可靠地对载波进行同步,本文对载波同步时PWM脉冲异常的产生机理进行了分析,并提出了一种实时触发SCL时钟的载波移相同步控制策略,能够可靠地消除分布式控制系统中同步信号的通信延时误差,保证同步时DAB变换器的PWM脉冲与电感电流正常。在所提载波移相同步控制策略的基础上,本文又给出了同步频率的设定原则,以进一步消除同步偏差。最后,搭建了五单元PETT的仿真模型与试验样机,仿真和试验结果验证了所提电力电子牵引变压器多模块载波移相同步控制策略的正确性与有效性。
1 PETT多模块载波移相异常脉冲产生机理
1.1 PETT的控制系统结构
采用级联H桥与双有源桥的PETT主电路拓扑见图1,输入侧采用级联H桥变换器,输出侧采用并联DAB变换器,N为PETT的模块数,Ug为交流输入电压,Ig为交流输入电流。
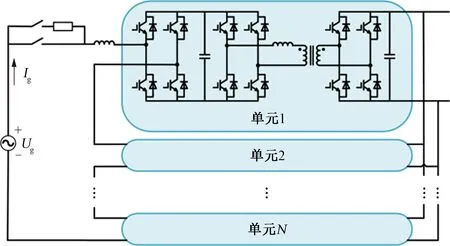
图1 采用级联H桥与双有源桥的PETT拓扑
为了提高PETT的模块化程度、可扩展性与控制性能,PETT数字控制系统通常采用图2所示的星形连接的分布式数字控制结构,包含主控制器与每个单元模块的分控制器。PETT的主控制器包含两个DSP控制器与一个FPGA控制器,其中DSP1负责系统级的电压与电流采样,上位机通信,系统故障诊断与保护。DSP2负责控制CHB的交流输入电流与中间直流侧电压,DAB的输出电压,产生CHB所需的调制波与DAB所需的移相值。每个分控制器都包含一个DSP控制器与一个FPGA控制器,分控DSP负责各自单元的电压与电流采样及保护,分控FPGA负责各自单元的PWM脉冲产生。主控FPGA与分控FPGA通过光纤进行数据通信。
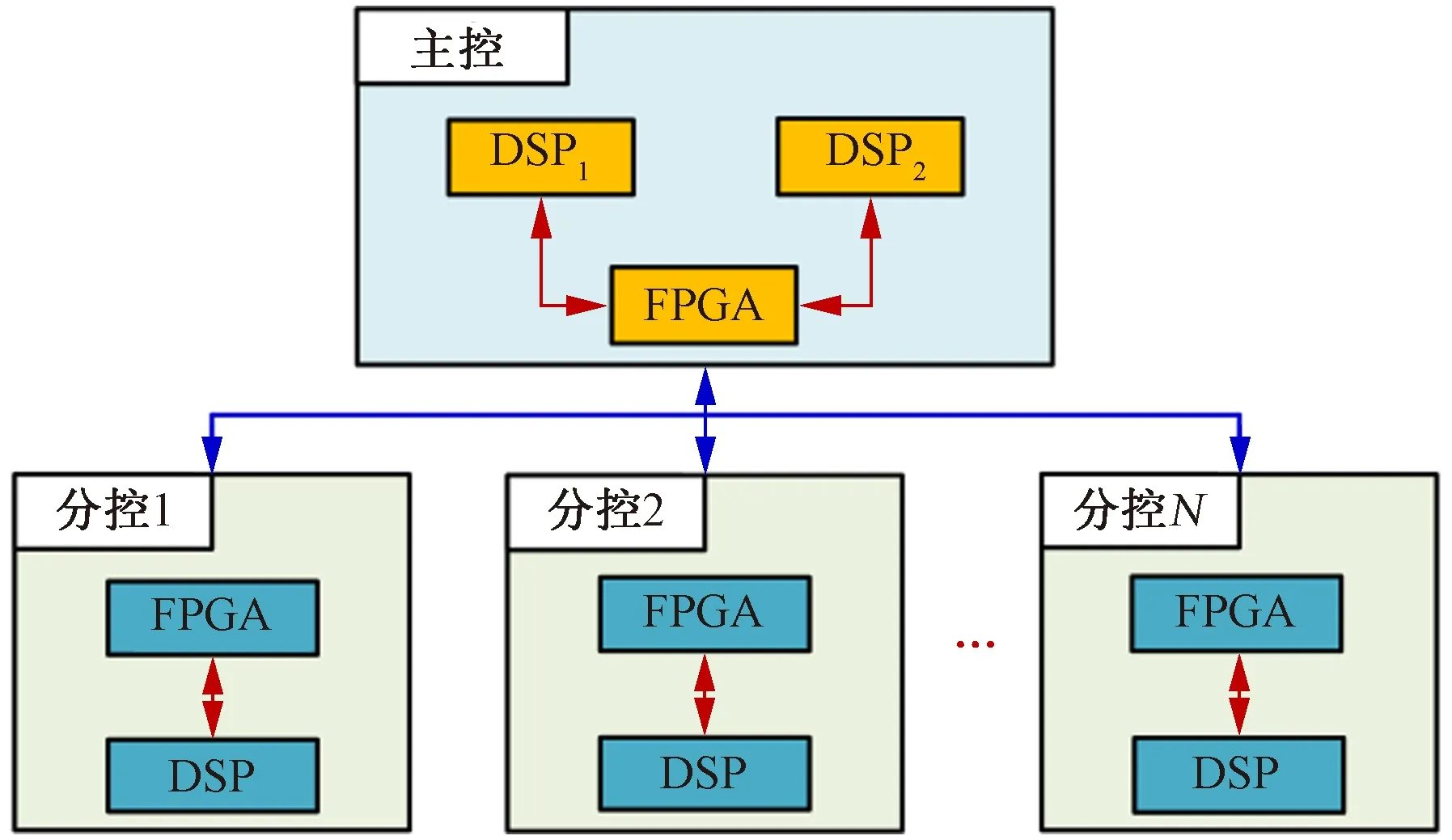
图2 PETT的分布式数字控制系统结构
1.2 输出并联双有源桥的载波移相原理
DAB变换器由原边全桥变换器、中频变压器及副边全桥变换器组成,其拓扑结构见图3,变换器的开关频率为f,变压器的变比为n:1,Udc为直流输入电压,Uo为直流输出电压,Up为DAB输入桥臂中点电压,Us为DAB输出桥臂中点电压,UL为DAB电感两端电压,IL为DAB电感电流,Is为副边全桥变换器输出电流,IC为输出电容电流。

图3 双有源桥变换器拓扑结构
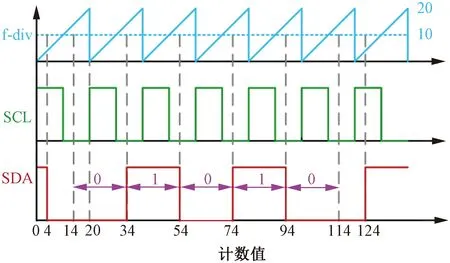
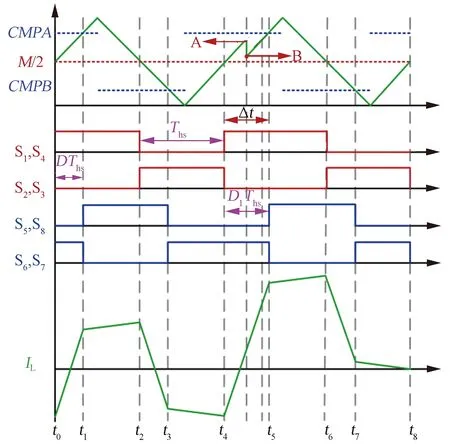
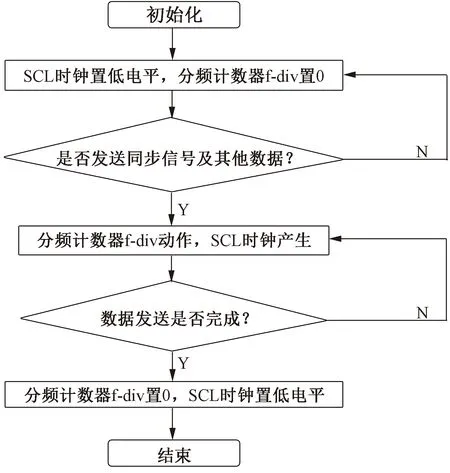
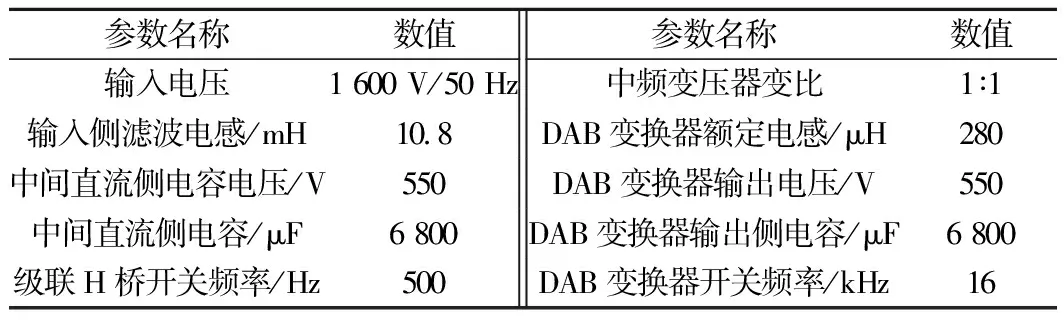
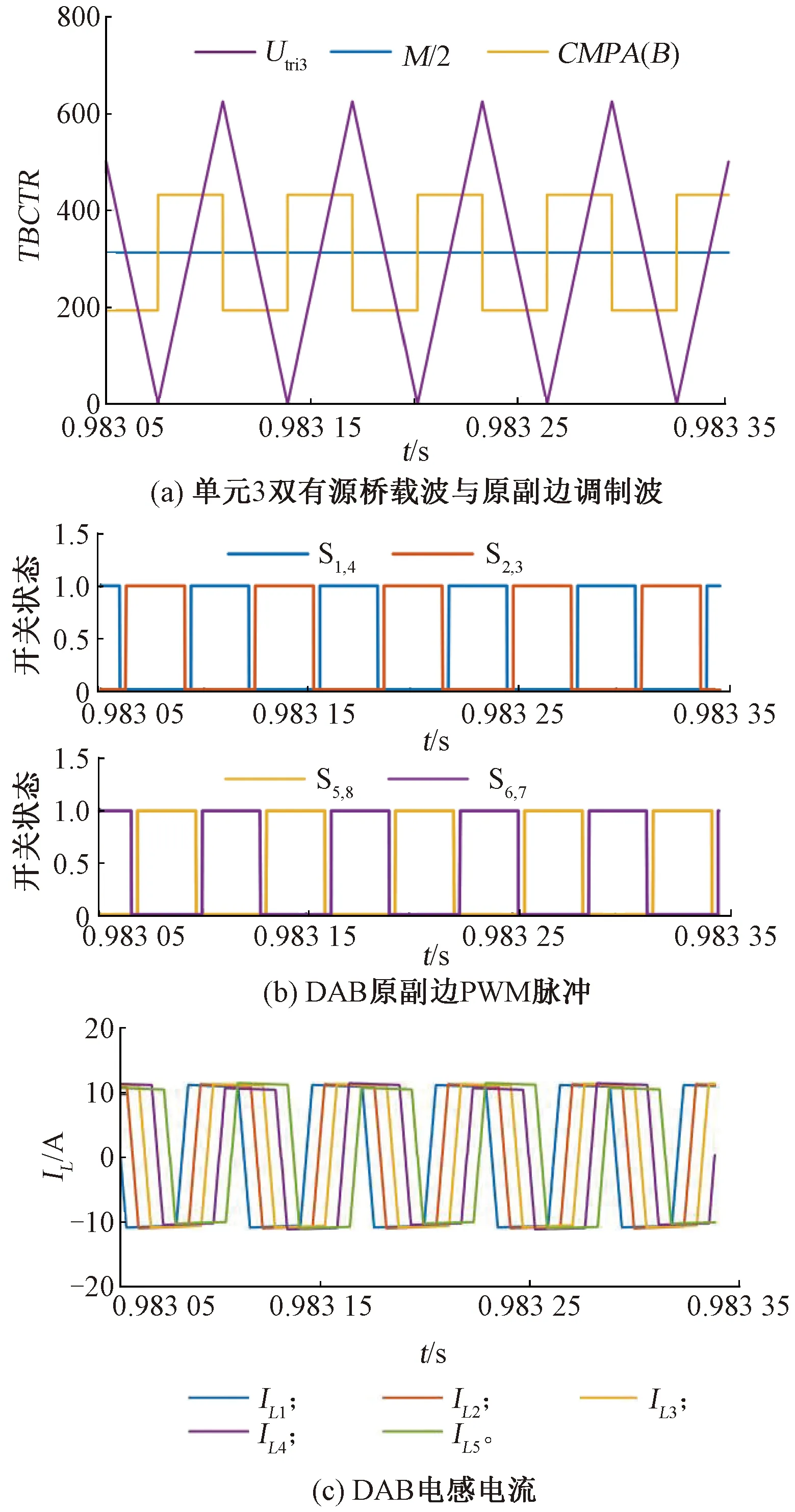
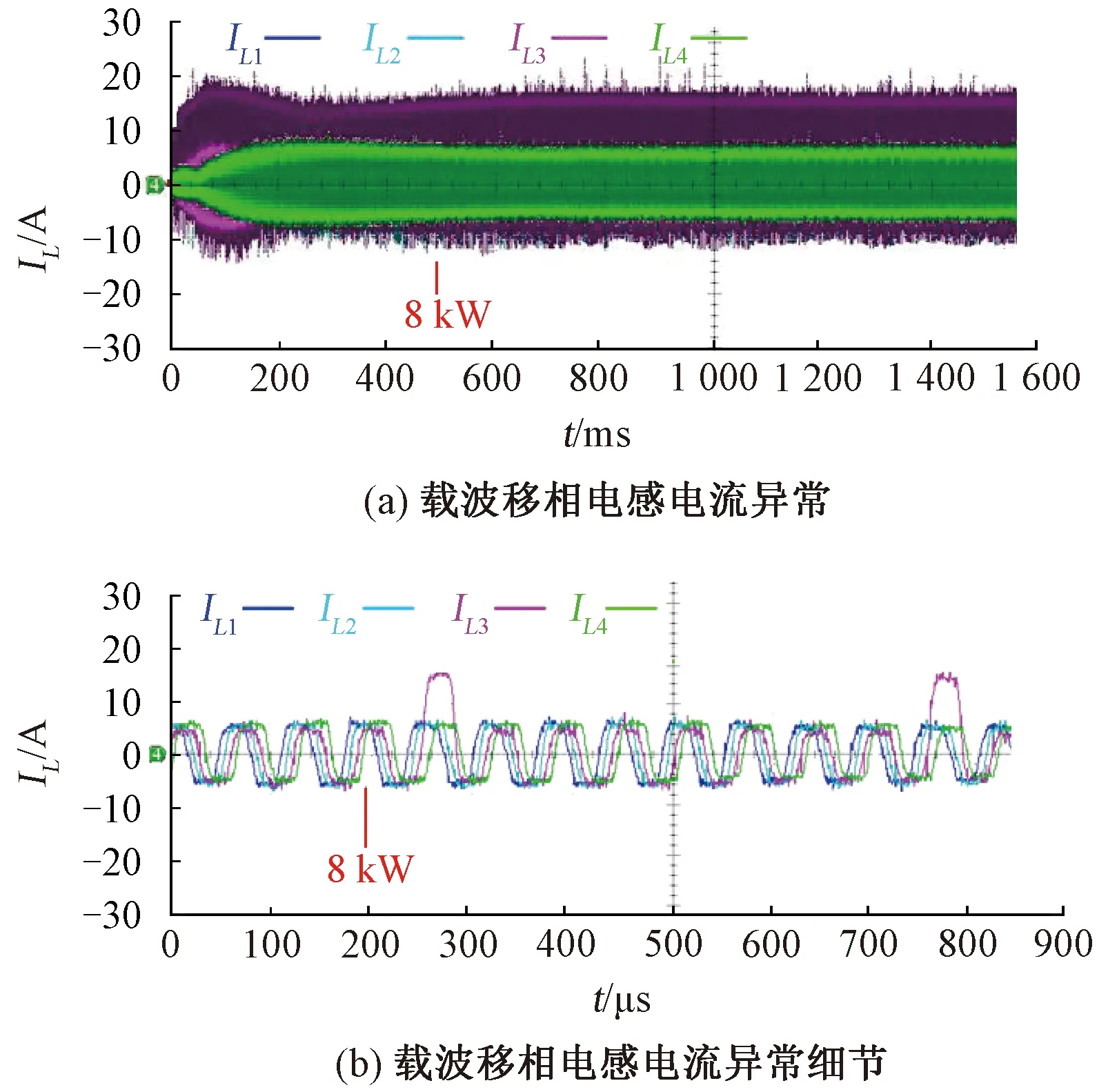
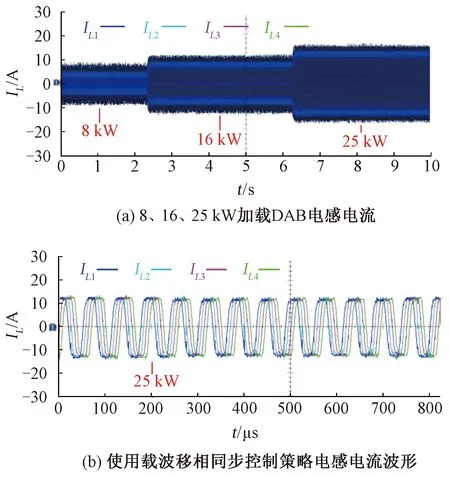
DAB的移相控制原理见图4,Ths为半个开关周期,D(0 图4 DAB变换器移相控制原理 (1) 在式(1)中,设t0=0,则各个时刻可表示为 (2) 多个DAB模块的载波移相原理见图5。将各单元DAB载波错开π/N,假设N=5,单元1~5的电容电流(Ic1~Ic5)错开π/5,则最终流过每个单元的电容电流都减小为IC,可将输出电容电流的等效开关频率提高5倍,输出电容电流纹波大大减小,进而减小了输出电容的电压纹波,降低了输出电容滤波器的体积和成本。 图5 DAB载波移相原理 在分布式控制系统中,载波通过对分控制器的时钟进行计数得到,不同的初始相位角可以转化为不同的载波初始计数值与初始计数方向,见图6,其中M为载波计数器的最大值,假设PETT的模块数N=5,单元1~5的载波(Utri1~Utri5)相位分别相差π/5。 图6 载波生成原理 在分布式控制系统中,由于各分控制器的晶振时钟存在偏差,需要主控制器每隔一段时间向分控发送同步信号,将各单元DAB的载波计数值同步到初始计数值。主控向分控发送的同步信号传输流程见图7,主控制器通过定时器中断产生同步信号,通过IIC通信将同步信号发送到各分控,各分控单元根据同步信号值决定是否同步。 图7 分布式控制系统同步信号传输流程 主控向分控发送数据所需的SCL时钟是对主控FPGA的时钟进行分频产生的,主控FPGA的时钟晶振为20 MHz,由图8所示,通过分频计数器f-div对主控FPGA进行20分频,SCL时钟的频率为1 MHz。在图8中,主控向分控发送的同步信号包含五位数据,其中首位和末位为固定值0,其余三位数据在0~7之间变化,分控根据具体数值判断是否进行载波同步。 图8 主控FPGA发送同步信号原理 载波与调制比较值进行比较产生DAB的PWM脉冲,在分控中DAB的PWM脉冲产生方式见图9,M/2为原边调制比较值,CMPA与CMPB为副边调制比较值,通过载波与M/2比较产生原边脉冲,与CMPA、CMPB比较产生副边移相脉冲,CMPA与CMPB的表达式为 图9 DAB电感电流突变 CMPA=M/2+D×M (3) CMPB=M/2-D×M (4) 根据IIC的通信原理可知,只有当SCL为高电平时,SDA由高电平变为低电平时,才允许发送数据,但由于系统运行后,主控FPGA中SCL时钟是一直存在的,在主控FPGA发送同步信号时,无法确定SCL时钟的当前状态,因此需要等到分频计数器f-div变为0时,才开始准备发送数据,则同步信号每次发送时的最大延时误差ε为 (5) 假设某个模块同步信号的时间偏差为Δt,如图9所示,当前周期与前一周期的给定移相值为D,当同步信号来临时,将载波计数器的值由A点同步到B点,当前周期的移相值D1变为 (6) 由式(6)可知,当同步信号存在偏差时会使当前周期的移相值增大,并且DAB开关频率越高移相值的变化越大。由式(1)可得DAB电感电流峰值相对于前一周期的增量ΔiL为 (7) 由式(7)可知,同步时DAB电感两端电压很高,并且高频DAB的电感很小,因此同步信号很小的偏差就会导致DAB电感电流发生突变。由图9可知,在载波同步时副边脉冲的占空比Ds变为 (8) 对载波同步周期变压器励磁电感电压ULm进行积分可得 〈ULm〉=nUoThs-nUo(Ths+Δt)=-nUoΔt (9) 其中〈〉代表积分,由式(9)可知,当同步信号偏差较大时,可能会造成变压器的偏磁。因此,研究准确可靠地载波移相同步控制策略,确保DAB可靠地进行载波同步,对PETT的正常运行十分重要。 由于同步信号在0~7变化,如果只有当同步信号的值为0或4时各分控才进行载波同步,那么载波同步时的通信延时误差Δt最大可达4 μs,如果DAB的开关频率为16 kHz,当前的移相值D为0.2,则由图4和式(2)可得载波同步前t4-t5对应的时间Δt4-5为 (10) (11) 由于t4-t5处于电感电流快速增加段,由式(7)可知电感电流峰值会增加到原来的两倍多,并且由式(10)可知,DAB开关频率越高,同步信号偏差对DAB电感电流影响越大。 图10 PETT多模块载波移相同步控制框图 在实时触发SCL的控制策略中,SCL时钟只存在于同步信号及控制变量发送时,而在其他时间SCL保持低电平,进而消除同步信号在发送时刻的通信时延,SCL时钟具体控制策略见图11,将SCL时钟初始化为低电平,分频计数器f-div清零,当需要发送同步信号及控制变量时,分频计数器开始计数,产生SCL时钟,当数据发送完成后,将分频计数器清零,SCL时钟置为低电平。 图11 SCL时钟控制流程 在此控制策略下,同步信号及控制变量通信发送方案见图12,在每个控制周期发送一次同步信号及控制变量,且两者相互独立,在发送同步信号的初始时刻,SCL时钟固定为低电平,分频计数器开始计数,产生SCL时钟,消除了同步信号在通信传输过程中的延时误差,保证了相邻两个同步信号的时间间隔相等,进而避免了DAB在载波同步时载波计数器的实际值与同步点偏差较大,保证DAB载波可靠同步。 图12 同步信号通信发送方案 各单元模块DAB进行载波同步时,在消除同步信号的通信时延后,还需要考虑同步频率如何设定。当载波同步的时间间隔过长时,由于各单元晶振时钟存在偏差,会造成DAB载波同步时载波计数器的实际值与同步点偏差较大,进而导致同步时DAB的PWM脉冲移相值与占空比发生变化,DAB电感电流突变。因此理论上同步频率越高越好。然而,当同步频率过高时,对数字控制系统提出了更高的要求,可能会导致控制系统时钟与数据传输紊乱。因此,本文给出了如下的同步频率设定原则: (1)保证开关频率为同步频率的整数倍,进而保证同步时所有同步点位置一致。 (2)保证控制频率为同步频率的整数倍,进而保证同步信号传输无需影响系统控制结构,且无需增加时钟,保证了控制系统可靠性。 很多妈妈自责,认为孩子感冒没有及时就诊引起了支原体肺炎,进而耽误了孩子的治疗。其实,妈妈们完全不必内疚,更不必自责。因为支原体肺炎是一种因支原体感染而引起的肺炎,是学龄儿童和青少年常见的一种肺炎,婴幼儿也有发病。 在本文中,开关频率为16 kHz,控制频率为2 kHz,因此只需选择载波同步频率为2 kHz,即每8个开关周期对DAB的载波进行同步,由于在8个开关周期内,分控FPGA晶振的误差很小,且由于消除了同步信号的通信时延,因此在对DAB进行载波同步时载波计数器的实际值与同步点相差很小,PWM脉冲的移相值与占空比基本不变,并且由于同步频率与控制频率一致,无需增加额外同步时钟,不会影响系统的控制结构,保证了数字控制系统的可靠性与稳定性。 为了验证所提电力电子牵引变压器多模块载波移相同步控制策略和同步频率设定原则的有效性与正确性,搭建了五单元PETT的仿真模型,仿真参数见表1。 表1 五单元PETT仿真与试验参数 假设单元3的晶振时钟存在偏差,并且单元3的同步信号存在通信延时误差,未使用载波移相同步控制策略时五单元PETT在负载功率为25 kW时的仿真波形见图13,从图13(a)可以看出载波同步时载波计数器的计数值TBCTR出现跳变,从图13(b)可以看出,载波同步时原副边PWM脉冲的占空比发生改变,DAB的移相值发生改变。从图13(c)可以看出,载波同步时单元3的电感电流发生突变。 图13 未使用载波移相同步控制策略仿真波形 使用载波移相同步控制策略及同步频率设定原则的仿真波形见图14,从图14(a)可以看出,载波同步时单元3的载波计数器没有出现跳变,从图14(b)可以看出,载波同步时原副边PWM脉冲的占空比与移相值没有改变,从图14(c)可以看出,载波同步时单元3的电感电流保持正常。 图14 载波移相同步控制策略仿真波形 为了验证所提载波移相同步控制策略的正确性与有效性,搭建了五单元PETT试验样机,试验参数与仿真参数一致。 没有使用载波移相同步控制策略时功率8 kW的电感电流波形见图15,从图15(a)可以看出,与其他单元相比,单元3的DAB电感电流出现明显畸变增大与偏置,电感电流的细节波形如图15(b)所示,由图15(b)可知,当同步信号来临时,由于同步信号在传输过程中存在通信时延,导致在同步时载波计数器的实际值与同步点相差较大,进而导致了在同步时DAB脉冲的占空比与移相值发生了改变,最终导致载波同步时DAB电感电流突变。 图15 未使用载波移相同步控制策略电感电流波形 在应用所提出载波移相同步控制策略后,进行了空载及加载试验。试验过程中的电感电流波形见图16。其中图16(a)为输出功率8、16、25 kW的DAB电感电流波形图,由图16(a)可以看出,在加载的过程中,各单元DAB的电感电流保持正常,没有出现电感电流突变的情况,图16(b)为25 kW下DAB电感电流的细节波形,由图16(b)可以看出DAB能够正常实现载波移相,结合图16(a)和图16(b)可以看出,在应用所提出的电力电子牵引变压器多模块载波移相同步控制策略后,消除了同步信号在通信传输过程中的随机误差,并且同步频率的设定原则保证了在一个同步周期内同步偏差很小,进而使得并联双有源桥变换器载波同步正常,同步时DAB的PWM脉冲移相值与占空比保持不变,DAB电感电流正常。 图16 使用载波移相同步控制策略电感电流波形 图17为单元5的中间直流侧电压Udc5与DAB的输出电压,从波形可以看出,中间直流侧电压与输出电压都稳定在550 V,系统能够保持正常稳定运行。 图17 单元5中间直流侧电压与DAB输出电压 本文研究了基于双有源桥式变换器的电力电子牵引变压器,对输出并联双有源桥式变换器的载波移相同步控制策略进行了深入研究。研究结果如下: (1)分析了分布式控制系统载波同步方式的工作原理,研究确定了分布式控制系统中通信时延误差对双有源桥式变换器PWM脉冲及电感电流的影响规律。 (2)提出了一种电力电子牵引变压器多模块载波移相同步控制策略,通过实时触发SCL时钟消除同步信号在传输过程中的通信延时误差,保证PETT各模块载波同步正常。 (3)提出了载波移相同步控制策略的同步频率设定原则,通过缩短同步时间来减小各分控同步偏差,进一步保证了PETT多模块载波同步的可靠性。 仿真和试验结果表明,所提出的PETT多模块载波移相同步控制策略能够保证PETT各模块载波同步正常,避免DAB的PWM脉冲及电感电流异常,实现输出并联双有源桥变换器的载波移相控制。

1.3 载波移相异常脉冲产生机理


2 PETT多模块载波移相同步控制策略
2.1 实时触发SCL时钟的载波移相同步控制策略




2.2 同步频率的设定原则
3 仿真与试验验证
3.1 仿真

3.2 试验

4 结论
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
电机与控制应用(2022年4期)2022-06-27
数学小灵通·3-4年级(2021年9期)2021-10-12
小学生学习指导(低年级)(2020年10期)2020-11-09
雷达学报(2018年5期)2018-12-05
通信电源技术(2018年5期)2018-08-23
通信电源技术(2018年5期)2018-08-23
数学大王·中高年级(2017年2期)2017-02-08
现代工业经济和信息化(2016年8期)2016-05-17
中学生数理化·高二版(2016年5期)2016-05-14
