高速磁浮牵引控制集成技术研究
2022-12-02 12:34赵海涛
控制与信息技术 2022年1期
徐 娟,肖 健,李 俊,赵海涛
(株洲中车时代电气股份有限公司,湖南 株洲 412001)
0 引言
磁浮列车运行过程中与地面不接触,相比轮轨列车,其具有不受轮轨黏着限制的优势,最高速度可超过600 km/h,因此高速磁浮系统将是我国选择建设大容量客运体系时考虑的重要方案之一[1]。高速磁浮列车分为常导型和超导型两种,目前已实现运营的既有线路只有上海磁浮列车示范运营线,其采用全套进口设备,磁浮列车为常导型。
牵引系统为磁浮列车提供运行动力,是高速磁浮交通技术中的一项关键技术。文献[2]描述了上海磁浮列车示范运营线磁浮列车的牵引系统,其整体优势在于系统简洁、模块化程度高,但系统架构不同于传统轮轨系统的,需另行配备驾驶控制功能。文献[3]所述的高速磁浮牵引控制系统主要实现高层控制、车辆导引等功能,在牵引系统中起着十分核心的作用,但文献仅限于功能介绍,未对其具体实现方案进行研究和分析。文献[4]~文献[6]仅对高速磁浮列车长定子直线电机变频器的控制系统进行了研究,但未对牵引控制系统进行描述。
驾驶控制技术最早出现在城市轨道交通(简称“城轨”)信号系统中。根据文献[7]中定义的功能划分,驾驶控制属于自动驾驶系统(ATO)中的主要功能。文献[8]~文献[10]介绍了当前城轨列车自动驾驶的控制算法,其包括传统的比例积分(PID)控制方法和当前的智能控制方法。高速磁浮列车动力系统不同于城轨列车,其被布置在地面,若将驾驶控制划分到运行控制系统,则会增加通信延时,降低运行的可靠性[11]。因此高速磁浮交通系统需增强运行控制的实时性和可靠性,以满足高速运行和大功率电机控制的要求;而原隶属于信号设备的驾驶控制已不能满足高速磁浮地面动力系统的运行需求。目前城轨列车牵引逻辑控制单元作为独立设备虽已有成熟技术,但对于具备驾驶功能的牵引控制系统集成技术,尚未有相关研究,因此如何实现在高速磁浮的牵引逻辑控制融合驾驶控制,是高速磁浮牵引控制系统最重要的技术研究方向。本文通过研究高速磁浮牵引系统的功能特性,提出一种适用于高速磁浮交通系统的牵引控制集成方案,并对其可行性进行仿真验证。
1 高速磁浮牵引系统概述
高速磁浮牵引系统(图1)包括轨旁大功率变流器系统、牵引控制系统、线路轨旁直线电机定子开关和长定子绕组等。牵引系统根据运行控制系统的要求,通过牵引控制系统控制大功率变流系统输出幅值、频率与相位可调节的电压和电流,并通过轨旁定子开关分段向磁浮列车所在的直线电机长定子绕组供电,从而实现对磁浮列车牵引力的有效控制。
根据供电范围,线路被划分为不同的牵引分区,牵引控制系统和大功率变流器被布置在线路沿线的牵引变电所中。如图1所示,根据供电和牵引能力需求,高速磁浮牵引系统的变流器可被布置在同一牵引分区的两端变电所或一端变电所。变流器机柜中包括变流器控制系统,其接收牵引控制系统的控制指令。为提高控制可靠性,牵引控制系统采用主从冗余控制方式,主从设备被分别布置在牵引分区两端;列车在不同分区之间运行时,通过牵引控制系统进行分区交接同步,从而实现运行协同。
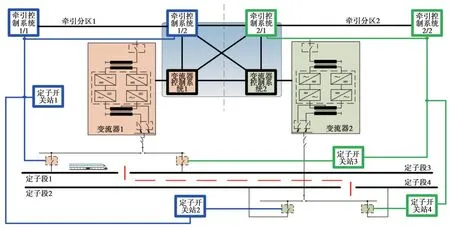
图1 高速磁浮牵引系统Fig.1 Traction system of high speed maglev
如图2所示,牵引控制系统发送牵引控制指令给变流器系统,变流器输出满足牵引控制指令要求的电压/电流,同时牵引控制系统通过定子开关站控制轨旁定子开关的通断,将变流器输出电压和输出电流供给列车所在的定子段。为尽可能降低损耗、提高电机效率,牵引控制系统按照列车运行序列顺序控制线路上定子开关的通断。牵引控制系统控制线路定子段顺序供电,实现列车起动、恒速运行以及制动停车等功能,使磁浮列车高速、安全、具有舒适感地运行。可见,牵引控制系统是高速磁浮牵引系统的核心单元,其直线电机特性与传统中低速磁浮的不同,牵引控制系统实现方案是高速磁浮列车运行亟须研究的问题。

图2 牵引控制系统连接关系图Fig.2 Connecting diagram of traction control system
2 高速磁浮牵引控制系统集成方案
高速磁浮牵引控制系统用于实现与运行控制系统和定子开关站等外围设备的通信,检测牵引系统状态,并基于运行控制系统发送的运行指令完成列车的牵引任务。结合高速磁浮动力系统的特性和运行需求,牵引控制系统具有逻辑控制、驾驶控制和换步控制功能(图3)。其中,逻辑控制功能主要实现顶层协同功能,使牵引系统的下级设备转换到满足列车运行的状态,包括通信控制、牵引状态控制及主从控制等功能;驾驶控制功能集成了原牵引逻辑控制中的速度控制和牵引/制动控制等功能,并进一步利用运行控制系统所提供的线路数据,实现符合线路特征的速度控制;换步控制功能对轨道上列车运行所在的定子段分时供电,以达到供电安全和节能的效果。

图3 牵引控制系统功能方案Fig.3 Function proposal of traction control system
2.1 逻辑控制功能
牵引控制系统的逻辑控制功能包括通信控制、牵引状态控制、主从切换控制和分区切换控制等,主要实现系统的顶层协同,使外部设备、变流器设备、同分区/不同分区的牵引设备连续工作,控制列车持续不断地运行。只有当牵引系统外部设备通信正常、牵引控制系统正常启用变流器后,才能启动驾驶控制功能。
2.1.1 通信控制
牵引控制系统建立与外部设备的通信链路,接收运行控制系统和定子开关站等外部设备通信的信息,并将自身的反馈信息发送给外部设备,实现与外部设备的协调工作。
2.1.2 牵引状态控制
牵引系统执行列车运行任务时,需合上主断路器、启动逆变控制、闭合输出开关,使变流器具备给轨道供电的能力。牵引控制系统通过牵引状态控制完成供电准备。
牵引系统具备8种牵引状态,分别为初始状态、基本状态、带电等待状态、列车运行状态、准备测试状态、带电牵引的测试状态、不带电牵引的测试状态、仿真运行状态。系统启动正常后,进入初始状态;接收到运控系统命令指令,则相继转入基本状态、带电等待、列车运行等运行控制状态。
基本状态时,牵引系统进入预备运行状态;带电等待状态时,牵引控制系统启动充电,建立中间电压;列车运行状态,牵引控制系统闭合输出开关,启动逆变控制,允许变流器开始工作;其余状态为测试仿真状态,用于故障检测和仿真。
2.1.3 主从切换控制
为提高系统的可靠性,需设置主从两套设备热备控制,一旦一套设备故障,立即启用另一套设备。因变流器系统被布置在分区的两端,为提高牵引控制系统与变流器控制系统通信的可靠性,当列车越过分区中间点时,即进行主从切换,将牵引控制系统的控制权切换到列车运行接近的一端。
2.1.4 分区切换控制
常导型磁浮列车线路被划分为多个牵引供电分区,当列车连续运行时,需在相邻的牵引分区进行无缝切换,以满足持续运行要求。
2.2 驾驶控制功能
驾驶控制功能包括驾驶状态控制和车辆运行控制,其主要根据运行控制系统提供的线路数据、车辆特征和运行调整信息,并考虑冲击、牵引/制动转换限制等因素,计算出给定变流器的控制指令,以驱动列车运行。
2.2.1 驾驶状态控制
高速磁浮牵引系统驾驶控制方案涉及非控制和运行控制两种状态。驾驶初始状态为非控制状态;当满足驾驶控制条件时,则转入运行控制状态,并根据运行控制系统(简称“运控系统”)发送的线路数据和停车点信息以及测速单元反馈的位置速度信息,实现速度的闭环控制,输出牵引力给定值给变流器单元。
运行控制状态激活的条件包括牵引系统无故障、停车点运行曲线计算完成、列车已悬浮等。在运行过程中,当不满足运行控制状态激活的条件或运行控制系统切断牵引系统时,驾驶状态将转换到非控制状态(图4),退出自动控车模式,所输出的控制指令恢复到默认值。

图4 驾驶状态转换图Fig.4 Driving status switching
2.2.2 车辆运行控制
车辆运行控制是驾驶控制的主要功能。结合高速磁浮交通系统供电特性,该功能包括停车点运行曲线计算、曲线计算补偿和步进式PID速度跟踪(图5)。停车点运行曲线计算接收来自运行控制系统的线路数据和停车点步进信息,通过停车点运行曲线计算驾驶控制的速度曲线。线路的不同牵引控制区域配置了不同的定子段切换方式,不同切换方式的切换过程对牵引力的影响也不同。因此需要基于不同牵引分区的定子段换步方式,曲线计算补偿功能对驾驶控制的速度曲线进行重新预测,生成新的控制曲线。控制速度与当前速度形成控制的偏差量,通过步进式PID控制对该偏差进行跟踪,计算生成当前的牵引/制动控制指令并输出至变流器单元。
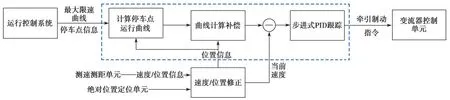
图5 车辆运行控制功能Fig.5 Functions of train operation control
2.2.2.1 基于最大限速的停车点运行曲线计算
运控系统发送停车点范围内的限速和线路数据至驾驶控制中的运行控制模块。为减少制动过程中的力的冲动,运行控制模块根据运营控制要求,选取牵引能力范围内的恒定加/减速度作为计算停车点运行曲线的加减速度参考值。根据已有的参考值并结合线路坡道和弯道数据,综合得出实际所产生的控制加/减速度;同时,根据不同区段的线路限速约束(图6中的曲线1),计算出从停车点到当前位置的运行参考速度(图6的曲线2)。
2.2.2.2 基于定子段特性的曲线计算补偿[12]
在磁浮列车运行过程中,牵引系统通过蛙跳法、两步法和三步法的换步方式为列车在不同定子段上提供的控制电流和电压,从而提供持续的牵引力/制动力并实现节能。
在蛙跳法或三步法换步过程中,前后相邻定子段因由不同的变流器供电,其电流加载可以由不同定子段同时进行,因此其没有动力损失;而在两步法换步过程中,因是在同一变流器供电工况下切换,对于相邻定子段,必须先将变流器的电流降为0并将此定子段与变流器断开,然后再将下一定子段与变流器连接,为下一定子段供电,因此存在切换过程的动力损失。若此时列车减速制动,因电流下降使产生的制动力减小,将导致列车超速或停车时冲标,如图6所示。因此,根据牵引分区定子段的换步方式,需采用不同的制动控制方案。在存在动力损失的牵引分区,需按照补偿损失的曲线算法进行控制,如图7所示。
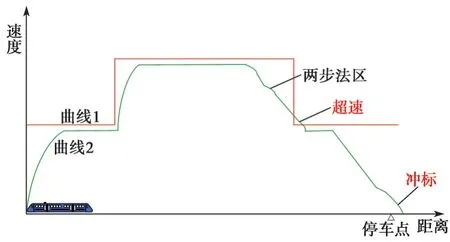
图6 两步法换步时超速Fig.6 Over-speed of two steps

图7 车辆运行控制流程Fig.7 Flow of train operation control
当磁浮列车处于两步法定子段的区间运行且前方有低的目标速度时,假设制动初速度为V0,目标速度为Vt,常用制动减速度为a0,则当前的制动距离为

设定子段换步的距离为S0,因左轨、右轨的定子段交错布置,S0为定子段长度的1/2。设制动距离S1内有n个S0,即n=S1/S0并取整数。
根据常用制动减速度a0和冲击率J0,计算在制动力损失50%和转换时间不超过t0条件下,需补偿的制动距离:

列车安全制动距离内,当S1>n×S2时,S3=S1-n×S2;否则S3=S1。
图8中的曲线2为补偿后的制动曲线。
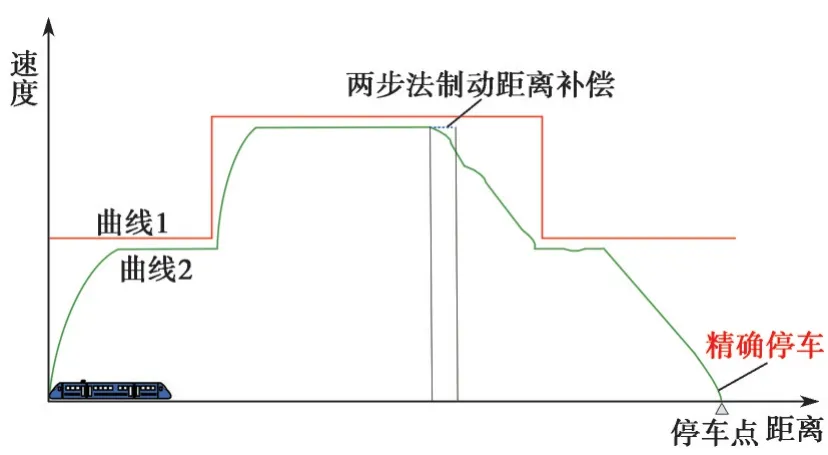
图8 补偿后的运行曲线Fig.8 Compensation of train operation curve
2.2.2.3 基于步进式PID的速度跟踪
列车运行控制必须满足冲击率J0低于0.75 m/s3的要求。在实际控制过程中,为保证运行的舒适度,计算相应的步进限制量:

通过Vlimit对输入控制的偏差进行限制,即为图9的步进量控制限制环节。通过采用此步进限制,可以消除速度偏差发生的突变,减少后续PID控制器的调整时间。


图9 PID控制量计算Fig.9 Calculation of PID control variables
通过PID控制器调整后,输出针对当前速度偏差的控制值并对其进行速度偏差到力的变换,同时力的输出需满足牵引/制动工况变化的约束,图10为牵引/制动工况变化示意图。最终,牵引控制系统输出力控制指令给变流器单元,由变流器输出幅值可变的三相交流电,分段输出给定子段,实现对速度的闭环控制和列车的安全高效运行。
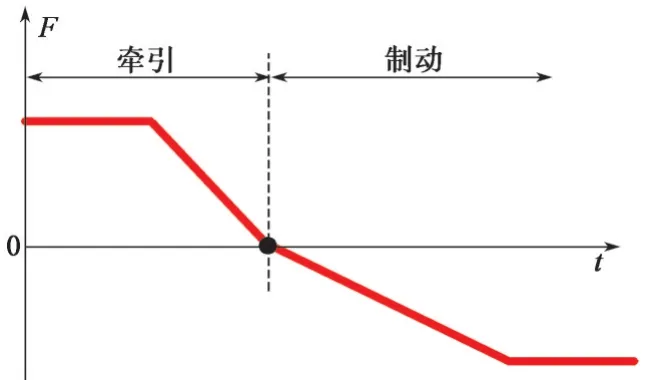
图10 牵引转制动工况变化示意图Fig.10 Switching between traction and braking conditions
2.3 换步控制功能
直线电机定子采用分段供电方式。牵引控制系统根据列车在线路上的位置,启用相应的变流器,对当前车所在的定子段进行供电。当列车在线路上由一个定子段跨到另一个定子段运行时,牵引控制系统根据线路布置的换步方式,依次控制原定子段中的电流,其按照一定的斜率下降至0,则断开原定子段开关,然后闭合新的定子开关,将定子段中的电流逐步增大到设定值,完成定子段的顺序换步控制。图11示出定子段换步电流变化示意。

图11 定子段换步电流变化示意图Fig.11 Diagram of stator switching current
对于定子段换步过程中所产生的动力损失,牵引控制系统通过驾驶控制功能进行补偿,从而实现列车制动减速的安全控制。
3 方案实现与仿真验证
为验证高速磁浮牵引控制系统的运行控制性能,搭建半实物仿真系统,涉及d-Space模拟仿真模型和运控仿真系统,其中d-Space模拟仿真模型包括牵引控制单元、定子开关站、车辆模型、线路模型和变流器模型等。图12示出半实物实验室调试场景。

图12 半实物仿真调试场景Fig.12 Debugging environment of hardware in loop simulation
实验室采用某试验线的牵引系统配置数据并将牵引系统设置为单分区两步法。设定车辆为单节车,最大速度为20 km/h,最大加减速度为1.0 m/s2,冲击率J为0.3 m/s3。图13示出半实物仿真平台的速度和牵引控制力数据,可以看出,控制过程平缓。图14示出半实物仿真平台速度和加速度曲线,可以看出,运行过程平稳。图15示出半实物仿真平台的速度距离曲线,可以看出,停车定位精确。图16示出换步控制时控制变流器电流的变化过程。实验结果表明,该速度控制方案能适应高速磁浮控制系统的分段换步特性,速度稳定,不存在超速触发的安全问题,计算的实际冲击率满足设定值需求,且停车定位满足±30 cm的精度要求,运行控制平缓。

图13 半实物仿真v-F曲线Fig.13 v-F plot from hardware in loop simulation

图14 半实物仿真v-a曲线Fig.14 v-a plot from hardware in loop simulation
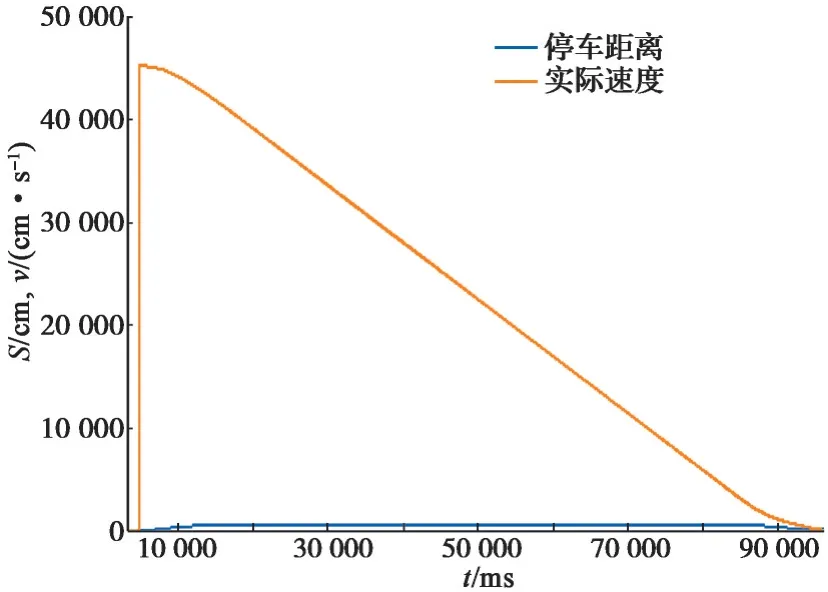
图15 半实物仿真v-S曲线Fig.15 v-S plot from hardware in loop simulation

图16 换步控制电流变化Fig.16 Switching current of stator with step-change control
4 结语
为适应高速磁浮动力系统配置在地面的特性需求,高速磁浮牵引控制系统需突破原有牵引控制系统的框架,纳入驾驶控制系统,以提高运行的可控性和实时性;增加定子段换步功能,并考虑定子段换步对运行过程的影响。对此,本文提出了一种高速磁浮系统的牵引控制实现方案,其整合了原牵引控制的加减速限制、冲击率限制以及工况转换约束,集成了城市轨道交通自动驾驶相关功能;同时还集成了高速磁浮牵引系统特有的分区切换、主从切换、定子段换步功能,能满足高速磁浮交通系统运营所必需的牵引控制需求。
针对依据该研究方案所实现的牵引控制系统,本文不仅完成了半实物实验室牵引控制、变流控制的集成验证,同时也在某试验线进行了现场验证。在某试验线上,牵引控制系统实现了与运行控制系统、车辆系统的集成联调,对于用户来说,集成驾驶功能后其操作控制简单,运行性能优越。半实物和试验线上运行测试结果表明,采用该集成方案后,运行控制的指令响应延时缩短为单独信号系统运行控制的1/10,能够实现高精度的速度控制和停车控制。
目前本方案在测试中的最高时速仅为80 km/h,还需要进一步验证时速达到600 km/h时的控制性能。后续将建设长大线路仿真实验平台,对高速下的系统各项控制性能指标进行验证。
猜你喜欢
防爆电机(2022年4期)2022-08-17
大众科学(2022年5期)2022-05-18
热力发电(2022年4期)2022-04-30
环球时报(2022-03-29)2022-03-29
防爆电机(2021年6期)2022-01-17
河北农机(2021年12期)2022-01-06
防爆电机(2021年3期)2021-07-21
铁道机车车辆(2021年3期)2021-07-12
防爆电机(2021年1期)2021-03-29
电子制作(2019年10期)2019-06-17