永磁同步电机无位置传感器控制及高速重投仿真研究
2022-12-02 12:33陈志博梅文庆黄守道
控制与信息技术 2022年1期
陈志博,高 剑,梅文庆,尚 敬,黄守道
(1.湖南大学 电气与信息工程学院,湖南 长沙 410082;2.株洲中车时代电气股份有限公司,湖南 株洲 412001)
0 引言
永磁同步电动机(PMSM)由于其高效率和高功率密度特点而被广泛应用。在许多工业装置中,电源瞬间中断现象通常会发生,这会导致大型电机跳闸,如果使电机恢复到零速后再重新启动,可能会因工业过程的频繁中断而对生产率产生负面影响。一种更实际的方法是带速重投,即一旦电力恢复,电机就会在既有速度条件下重新投入运行,而不必等到电机处于停顿状态后再启动。采用无位置传感器控制策略,当逆变器在电机旋转工况(特别是在高速范围内)下启动IGBT开关时,电机转子的初始位置及转速估算是逆变器重新投入运行的基本条件,如果初始转子位置包含估计误差,或者观测器收敛速度慢,则反电动势(back electromotive force,Back-EMF)会引起电流冲击,严重时会造成过流故障。
目前已经报道了多种无位置传感器下的带速重投方法,这类对高速旋转的电机进行转子初始位置检测并将其直接带入闭环运行的方法可被称为Catch Spin[1],Coasting Restart[2]或Flying Restart[3-4]。高速自由旋转状态的电机会产生反电势,利用绕组端电压可直接用于确定转子的位置[5-7],但这需要增加额外的电压传感器,增加了设备成本。为此,现有的国内外研究多利用电流传感器来判别电机是否处于高速旋转状态并检测高转速状态下的转子初始位置,相应的算法有独立开关脉冲法[8]、零电压矢量脉冲法[2-4,9]和零电流矢量闭环法[1,10-11]等。文献[8]提出一种独立开关脉冲法,但其需预先确定开关管导通时间,通用性较差。零电压矢量脉冲法通过对一个或多个零电压矢量脉冲的电流响应来实现对转子初始位置或速度信息的检测。根据零电压矢量脉冲个数,这种方法又被分为 零电压矢量单脉冲法[2,12]、零电压矢量双脉冲法[3,13]和零电压矢量多脉冲法[3-4,9,12]3种类型,其主要不足在于零电压脉冲的宽度和时间间隔须通过实验测定,难以实现对转子位置和转速的连续观测,高速时易造成电机过流。零电流矢量闭环法[10,14]对电机提出高转速初始位置检测和启动方案,然而均没有实现初始角度的连续观测,对何时进入零电流闭环控制有一定要求。
为避免以上方法的不足,本文着眼于工程实际,提出一种基于三段式控制模式的带速重投方法。其在初始投入时采用基于电流幅值闭环的零电压矢量法,在电流闭环控制方式下实现高转速时的初始位置检测,且位置检测时电流环处于运行状态。这种方法在现有的PWM调制理论基础上可实现对高转速状态下转子初始位置的连续观测,并采用虚拟电阻法以提升转子位置观测的精度;初始位置检测完成后,只需修改d-q轴电流参考值,便可使电机进入正常工作状态。采用该方法,电机电流始终处于闭环状态,从而保证全过程不会出现较大的瞬时电流,尤其适用于风机、水泵、多机并联、大惯性系统等场景的永磁同步电机带速重投。
1 无位置传感器高速重投方法
在无位置传感器控制策略下,对PMSM转子位置信息的检测十分关键。为防止高速重投时电机出现电流冲击现象或者发生过流故障,本文采用基于电流幅值闭环的零电压矢量法进行初始投入,随后转换为常规的双闭环矢量控制策略,在不同控制策略下位置信息的检测方法也有所不同。
1.1 位置信息检测原理
本文以永磁电机及其前端逆变器组成的系统为研究的对象,具体如图1所示。
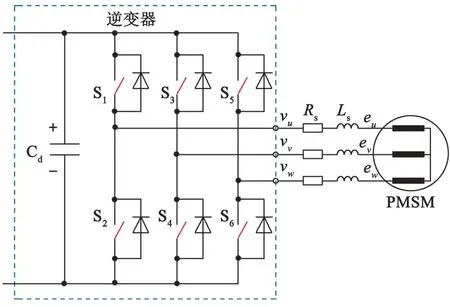
图1 永磁同步电机系统拓扑图Fig.1 Topology diagram of permanent magnet synchronous motor system
图1中,Rs为电机定子电阻,Ls为定子电感,S1~S6为开关管,Cd为直流母线电容器。若逆变器上管S1,S3和S5一直断开,当下管S2,S4和S6同时闭合时,电机绕组被逆变器短接,电机绕组的端电压近似为零,电流路径如图2(a)所示;当S2,S4和S6同时断开时,电机绕组的端电压近似为零或直流母线电压Udc,因绕组电感的续流作用,电机通过图2(b)的路径对直流母线电容器充电。
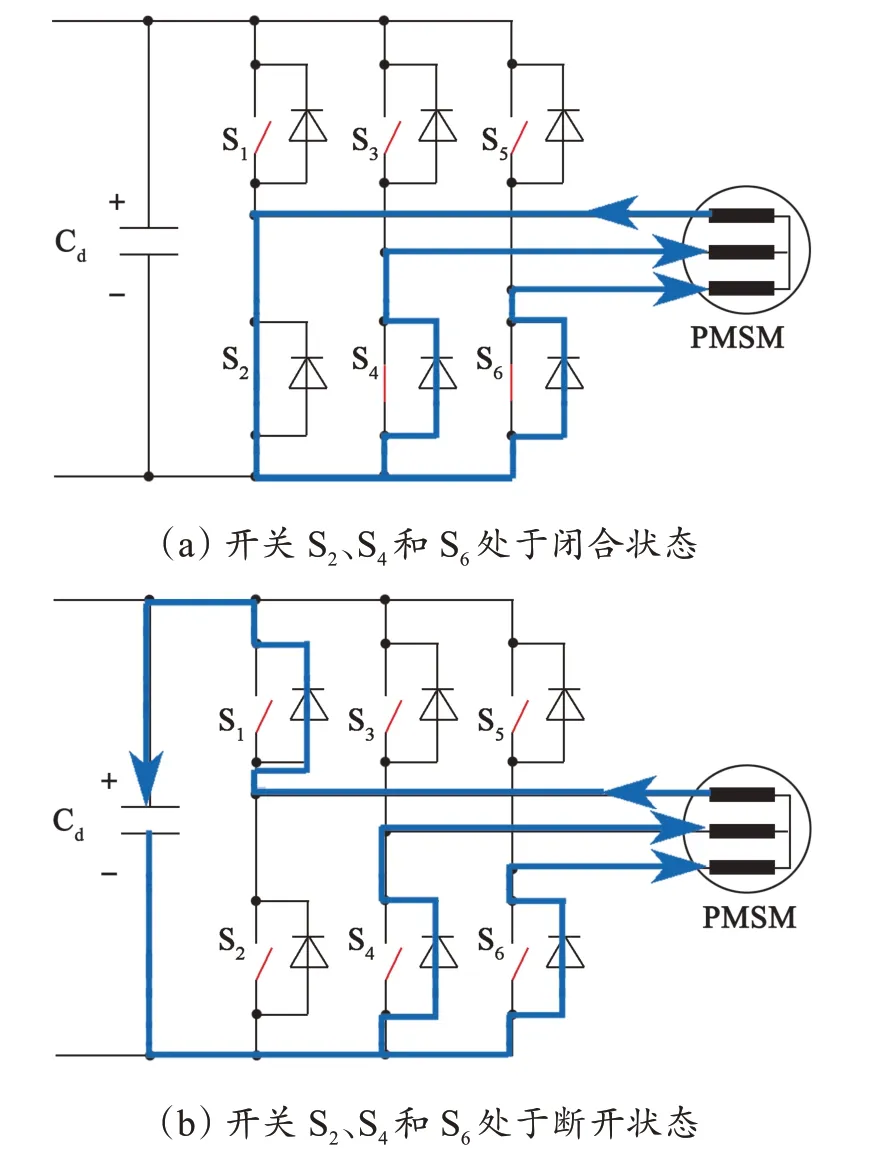
图2 零电压矢量法开关示意Fig.2 Schematic diagram of zero-voltage vector method switching
记等效定子电压矢量为Vs,等效定子电流矢量为Is。因下文需要重点关注逆变器等效阻抗与电机定子电阻的关系,为简化分析,将逆变器等效为电阻负载,如图3所示。图中,Rinv为逆变器等效电阻。
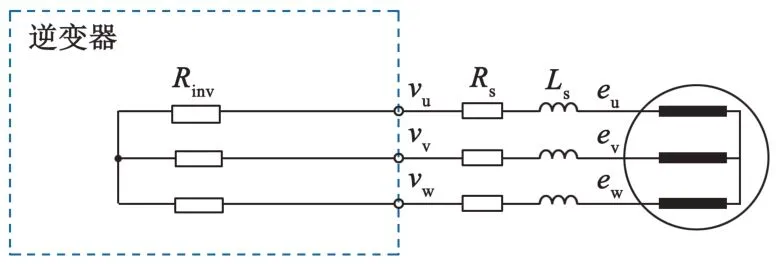
图3 逆变器等效示意图Fig.3 Inverter equivalent diagram
在d-q旋转坐标系下,有

式中:vdq——逆变器输出电压的dq轴分量;idq——电机电流的dq轴分量;edq——永磁电机反电势的dq轴分量;Ldq——永磁电机dq轴电感分量。
如果定子电流足够小,则可以认为

而电机在高速旋转时,有

则可以得到逆变器电阻:

式中:ωe——电机的电角速度;Ψf——永磁体的永磁磁链;Iref——电流幅值参考值。
电机定子电阻Rs一般较小。当电机转速较高且Iref较小时,可以认为

由永磁电机在d-q旋转坐标系中的电压方程可知:

考虑稳态时d-q轴电流的变化量为零,且由于Rinv≫Rs,简化式(6),具体如下:
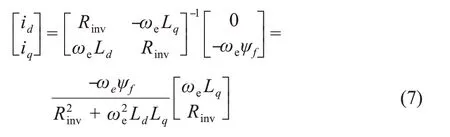
定子电流在d-q坐标系中的角度为
当Iref较小时,可进一步简化式(8),得

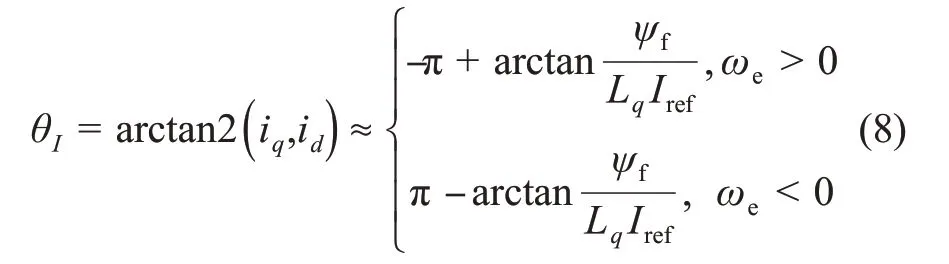
由式(9)可以看出,当电机转速比较高而Iref较小时,定子电流方向滞后d轴90°,则根据图4可知,Is在d轴的分量I d的方向就是转子磁链Ψr的方向。
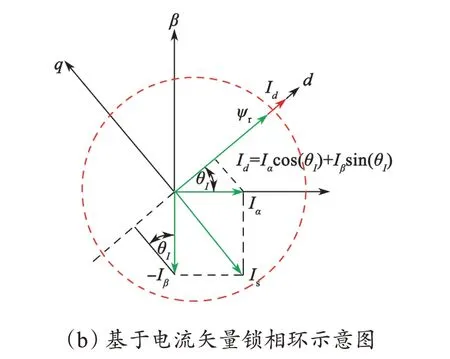
图4 电流幅值闭环型零电压矢量控制示意图Fig.4 Schematic diagram of current amplitude closed loop based zero-voltage vector control
1.2 电流幅值闭环型零电压矢量法
由1.1节可知,通过对Id方向的连续锁相,可以实现电流闭环情况下的速度与位置的连续观测。图5示出电流幅值闭环型零矢量法的实现原理,其中Rv为虚拟电阻,ωesti为转子电角速度的估算值,θesti为位置角的估算值。

图5 电流幅值闭环型零矢量控制法原理Fig.5 Principle of current amplitude closed loop based zero vector control
因为给定电流Iref接近于零,Id非常小,若直接进行PI控制,则误差较大;而虚拟电阻Rv不改变Id方向,通过图5(a)进行锁相环运算,可以得到较为精确的ωesti。对于ωesti存在的毛刺问题,可以将其通过低通滤波器后输出,再进行积分处理。由于低通滤波器会产生一定延迟,对转子位置角产生一定的滞后误差,可以根据低通滤波器的截止频率进行位置角补偿,补偿角度如下:

式中:ωc——低通滤波器的截止频率,ωc=kωe。
1.3 双闭环矢量控制方法的位置观测
根据1.1节所述三相PMSM同步旋转坐标系下的数学模型,列出定子电流的动态系统方程:
式中:Ed,Eq——dq坐标系下的感应电动势。
为获得式(11)中的感应电动势值,设计如下观测器:

由于本文采用PI调节器方式,故将Ed和Eq设计为
式中:Kp——比例调节系数;Ki——积分调节系数。
对式(13)进行离散化处理,得到
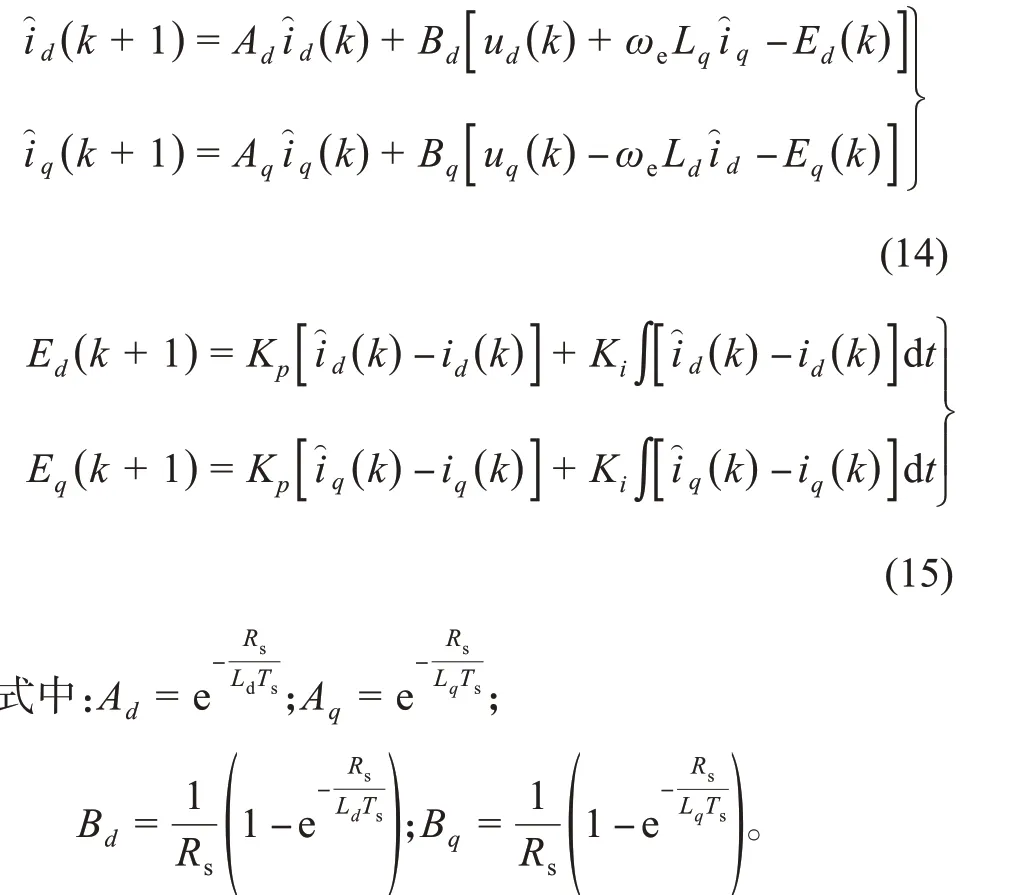
图6示出转速与位置的估计方法。通过式(14)和式(15),可以获得永磁电机d轴的感应电动势,然后将其送入锁相环,从而获取到转子位置角的估算值。
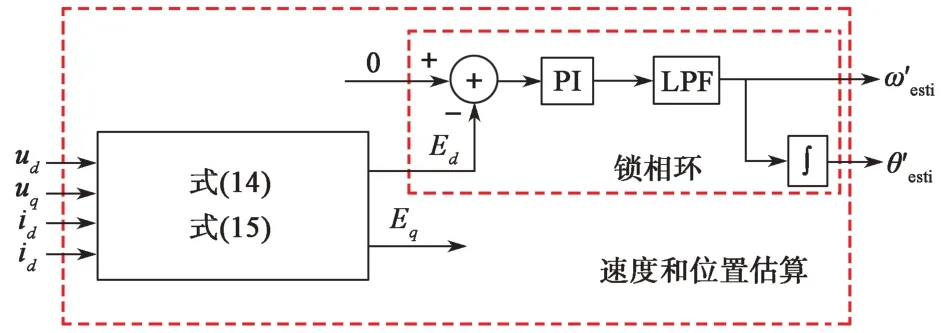
图6 基于锁相环的转子位置角观测方法Fig.6 Rotor position angle observation method based on phase-locked loop
2 不同观测方法的切换策略
无位置传感器PMSM带速起机时,本文采用了3个步骤进行切换控制,其目的是为了保证电机初始投入时避免出现电流过冲击或发生过流故障,且使得控制系统能够平滑地切入正常的双闭环矢量控制策略,使驱动电机恢复到正常的工作状态。完整的带速重投启动过程如图7所示,具体控制步骤如下:
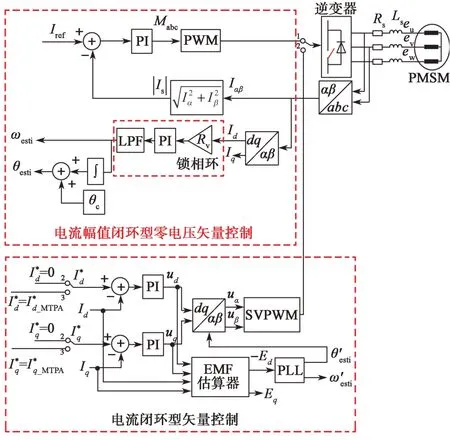
图7 完整的带速重投启动过程Fig.7 Complete start-up process of PMSMwith speed reinvestment
(1)开关置于位置1,采用基于电流幅值闭环的零电压矢量法,通过文中所述的调制方法将Iref控制在一个微小值,通过d轴电流锁相的方法实现对电机转速与位置角的连续观测;
(2)开关置于位置2,采用I d=I q=0的控制方式,本步骤需要用到步骤(1)所估算出来的初始值,以减弱切换时的状态冲击;通过切换,将对d轴电流的锁相环转换到对反电势的锁相环上进行速度与位置观测,并将调制策略改为正常运行时所采用的SVPWM调制;
(3)开关置于位置3,控制系统实际上已经进入正常的双闭环控制模式,可启动最大转矩电流比控制(maximum torque per ampere control,MTPA)控制策略,电机根据实际工况进入双闭环的控制策略中,带速重投完成。
3 仿真研究
为验证本文所提方法的可行性与有效性,采用MATLAB软件搭建了整个驱动系统的数字化模型,对无位置传感器下的永磁电机高速重投进行了全过程仿真,所用的永磁电机参数如表1所示。
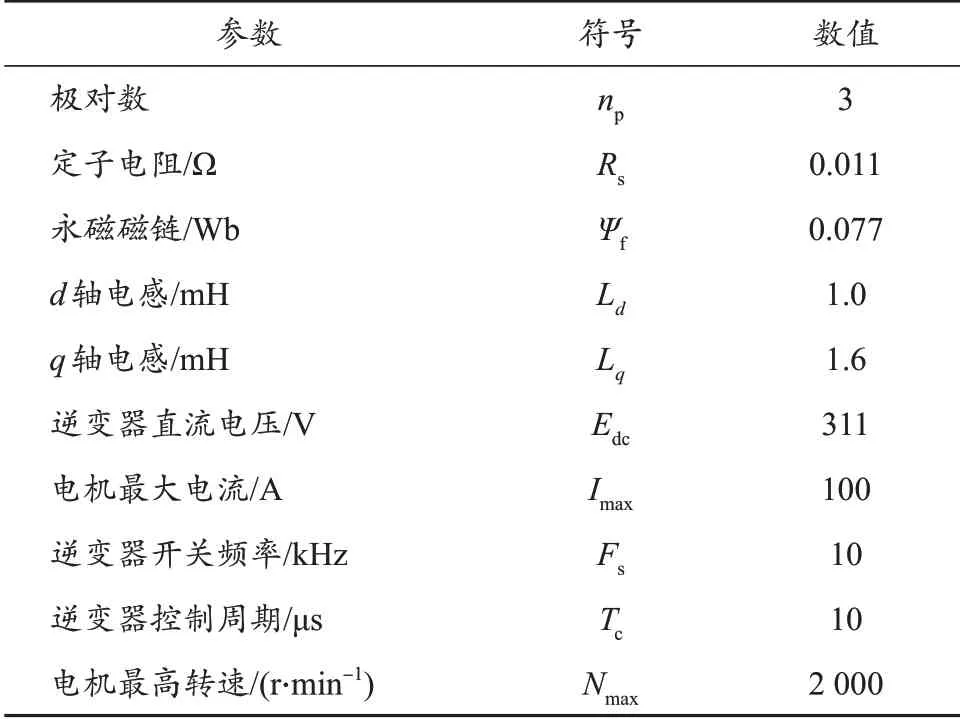
表1 永磁同步电机参数Tab.1 Parameters of PMSM
试验时,在初始状态下,让电机转子处于高速旋转状态。为考验控制系统在恶劣工况下的跟踪响应能力,设定不同时刻转速给定值,具体如下:
(1)在0~0.2 s时刻,转速从0线性上升到1 000 r/min;
(2)在0.2 s~0.6 s时刻,转速从1 000 r/min线性下降到800 r/min;
(3)在0.6 s~2 s时刻,转速从800 r/min线性恢复到1 000 r/min。
控制器的执行顺序如下:
(1)在0.245 s时刻,控制器投入运行,此时电机转速处于由1 000 r/min线性地下降到800 r/min的过程中;
(2)在0.245 s~0.8 s时刻,执行电流幅值闭环型零矢量法,电机电流设置为0.5 A;
(3)在0.8 s~1.0 s时刻,执行d-q轴给定电流均为零的矢量控制,电机电流基本在0左右;
(4)在1.0 s~1.3 s时刻,转矩给定从0线性地上升到8 N·m;
(5)在1.3 s时刻之后,转矩给定保持在8 N·m。
图8示出带速重投全过程仿真波形。

图8(a)为转速、转速估计误差、转矩及电机电流仿真波形,图8(b)为图8(a)的局部放大,重点关注Progress.2和Progress.3这两个切换时刻各个参数的变化情况。可以看出,从0.245 s时刻起,驱动控制器被投入运行,经过持续时间为2个定子频率周期的较剧烈振荡后,进入电流幅值闭环型零矢量控制状态,控制系统观测出准确的转子转速与位置角,电机电流无冲击,电机发电电流很小;在0.8 s时刻,执行d轴和q轴给定电流均为零的矢量控制,电机电流没有冲击且大小维持在零附近。图8(c)示出实际位置角与估算位置角、位置角估计误差仿真波形,图8(d)为图8(c)的局部放大,可以看出,在Progress.2和Progress.3时刻,分别采用了两种不同的速度与位置观测器,其切换过程均非常平稳,转速和位置角的观测值没有冲击;在1.0 s时刻,控制系统进入有转矩给定的矢量控制状态,转矩迅速跟踪给定值,电机电流平稳增加,电机重投完成,恢复到正常运行状态。全过程位置观测误差较小,电机运行平稳。
4 结语
本文针对无位置PMSM高速重投的全过程,提出一种三段式控制模式的高速重投策略。其在电机初始投入时刻即考虑了电机电流的闭环控制,有效抑制了过大的启动电流;实现了高速重投全过程中转子位置的连续观测,给控制系统的合理设计与模式切换带来较大的便利;通过合理的切换策略,控制电机从起机到平稳带载运行,全过程无电流冲击。该策略容易实现,具有良好的实用价值。
然而在某些应用场合,永磁电机需要在超过额定转速时重新投入使用。此时电机的反电势幅值已超过直流母线电压,但由于逆变器还未投入使用,无法对电机进行弱磁控制,使电流幅值闭环型零电压矢量法存在失效的可能。对此,后续将进一步深入研究。
猜你喜欢
防爆电机(2022年4期)2022-08-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
军民两用技术与产品(2022年3期)2022-06-05
纺织服装周刊(2022年16期)2022-05-11
物流科技(2022年2期)2022-05-07
防爆电机(2021年6期)2022-01-17
防爆电机(2021年5期)2021-11-04
防爆电机(2021年3期)2021-07-21
防爆电机(2021年1期)2021-03-29