常导长定子高速磁浮运行控制系统研究
2022-12-02 12:33张家欢石阳阳
控制与信息技术 2022年1期
方 凯,张家欢,石阳阳,李 勋
(湖南中车时代通信信号有限公司,湖南 长沙 410005)
0 引言
常导长定子高速磁浮系统(简称“常导高速磁浮”)是国家重点关注的轨道交通前沿技术[1],其利用常导电磁铁吸引力使列车实现无接触运行,运行速度最高可达到600 km/h,是未来交通装备发展的重要方向之一。在常导高速磁浮交通系统中,列车与轨道之间不存在直接的轮轨关系,列车本身是直线电机的转子,由沿着轨道铺设的直线电机长定子提供的地面牵引力驱动。因此常导高速磁浮运行控制(简称“运控”)系统的被控对象不同于传统轮轨轨道交通的信号系统[2]。例如,由于列车的牵引力在地面,因而运控系统实现运行速度控制和牵引力切除的功能也被转移到地面控制设备上。目前世界上仅有的常导高速磁浮商用线是上海高速磁浮示范线。该线路采用西门子公司提供的运控系统,其硬件采用SIMIS®类型的计算机[3],运行了近20年。然而该系统没有实现持续技术更新,且设计时仅考虑了城市内点对点运输的运营需求,已不能满足目前市场对高速磁浮的长大干线和自动追踪运营等要求。为此,本文借鉴了上海高速磁浮示范线的成熟经验,研发了一套自主创新的常导长定子高速磁浮运控系统,其核心部件采用拥有中车自主知识产权的安全计算机硬件平台搭建,不仅能够满足算力需求,简化了系统架构,而且适用于海拔5 100 m以下复杂地理气候环境条件。本文通过系统需求及系统风险分析,明确了系统架构与功能,有助于高速磁浮运控系统的自主化研究。
1 常导高速磁浮运控系统需求分析
本文所提出的常导高速磁浮运控系统方案参考了上海龙阳路至浦东机场磁浮示范线和高速铁路的需求[4],以实现长大干线自动追踪运行、满足长途多分区、适应复杂地理气候环境条件的列车安全运营为目标,从运营场景描述和风险源分析入手,形成常导高速磁浮列车设备系统和控制中心自动运行的功能需求。本方案基于标准GB/T 28809-2012《轨道交通通信、信号和处理系统信号用安全相关电子系统》[5],采用安全生命周期V模型进行设计,准确识别出构建运行控制系统的特殊需求。方案实现后,再通过辅助技术手段进行跟踪检查,避免遗漏、接口定义不全或冲突,最后通过实验室半实物仿真手段确保现场测试前的先期验证,提高了系统集成过程的可见性。
1.1 系统总体需求
常导高速磁浮运控系统在整个常导高速磁浮交通系统中起到一个对列车运行进行自动控制与安全防护的核心作用[3],如图1所示。
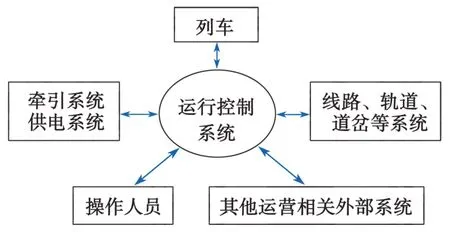
图1 运控系统在高速磁浮交通系统中的地位与作用Fig.1 Status and function of operation control system in high speed maglev transit system
高速磁浮交通与传统高速铁路交通、城市轨道交通相比,需求差别主要体现为自动化程度更高、对无线通信依赖程度高、可实现指定停车点停车等几个方面[5],这些差别也是本运控系统方案设计的重要需求点:
(1)可以实现全线(含车辆段/停车场)自动化运行。高速磁浮列车能达到更高的自动化运行等级,车辆根据运营时刻表自动唤醒与休眠、自动投入或退出运营、自动折返、自动停站与启动、自动控制车门和站台门的开闭[6-7],甚至可以根据运营需要自动加减车,实现公交化运营,满足安全、高效、节能及环保的运营目标。
(2)对车地无线通信系统要求高。高速磁浮交通的牵引系统依靠车辆上回传的位置信号进行控制,要求车地无线通信系统具备低时延、高可靠的特性。
(3)安全性及可靠性高。高速磁浮交通的牵引系统被设置在地面,列车本身无动力,其运行由地面设备控制,运控系统负责完成列车从自检到运行调度的全部过程。直线同步电机性能决定了一个牵引分区内同时只能有一列车运行,从而使运控系统按照闭塞区间划分方式进行列车的运行追踪,使磁浮交通系统具备更高的可靠性和安全性。
(4)指定地点停车。高速磁浮列车悬浮和导向都采用主动控制,悬浮、导向和涡流制动装置依靠列车供电系统的能量;列车启动和低速运行时由车载蓄电池供电。当列车速度大于80 km/h时,车载线性发电机为列车提供电力并为车载蓄电池充电;列车运行异常时,运控系统会切断牵引供电,列车只能依靠车载蓄电池的能量来保持列车悬浮并进行制动。如果车载蓄电池能量耗尽且不能充电,则列车无法再次悬浮。因此,除车站停车区外,系统在运行线路上还设置了若干辅助停车区(设动力轨和疏散逃生通道),停车区的动力轨可以给列车充电。系统在线路上设置车站停车区和辅助停车区作为目标停车点,如果列车能在目标停车点停车,则称系统是安全的。以上安全防护的双曲线(最大和最小限制曲线)控制由运控系统自动完成[8]。
(5)站台门联动控制。目前城市轨道交通基本上都安装了站台门,实现车门和站台门联动。在高速磁浮运营场景中,也需要考虑站台门联控,同时需要考虑对站台门与车门夹缝内的人员和物品的探测技术和管理手段。
(6)悬浮联动控制。磁浮列车没有传统的车轮,当列车启动和停止时,需要对悬浮导向系统进行联动控制。
(7)定位与轨道检知。磁浮列车没有轮轨关系,定位、测速和轨道占用的检知依赖于列车将定位系统数据回传至地面控制中心并进行相应处理。
1.2 高速磁浮列车系统风险分析
1.2.1 系统的顶层事故风险源
以TÜV MODSafe[9]的第一层级的危害清单为样本,结合多年来铁路行业事故总结经验,并通过危险与可操作性(HAZOP)讨论会议,对高速磁浮列车系统可能产生的顶层事故进行整理,形成如表1所示的高速磁浮列车的顶层隐患。
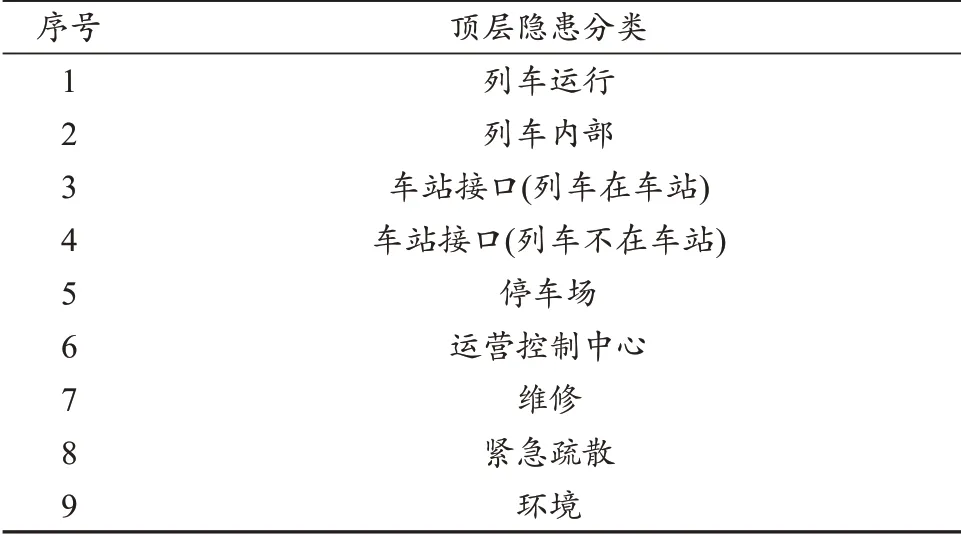
表1 根据MODSafe所列的高速磁浮列车顶层隐患Tab.1 List of the top level hazards of high speed maglev based on MODSafe
对列车运行、列车内部、维修及环境等导致的9大类顶层隐患,利用故障树进行系统的风险源梳理,定义风险的名称、原因、触发事件和应对措施,明确运行控制系统在安全性、可靠性方面的要求[9],具体如表2所示。
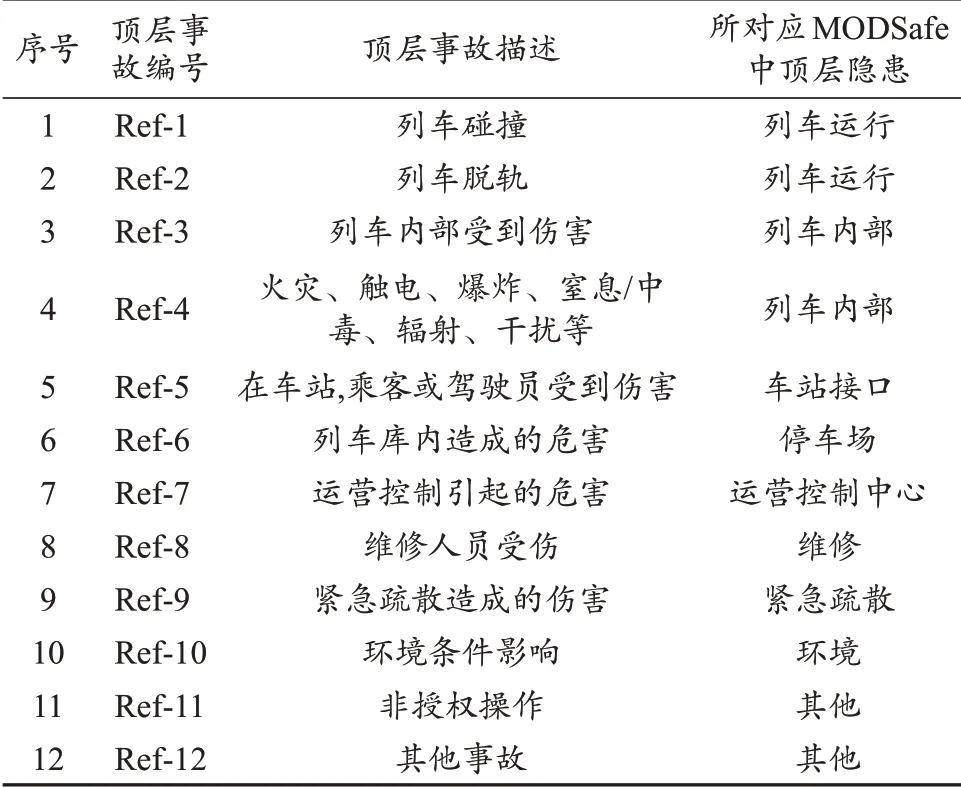
表2 高速磁浮列车系统顶层事故清单Tab.2 List of the top level accidents for high speed maglev train system
1.2.2 初步隐患识别方法
高速磁浮列车系统初步隐患识别方法主要采用故障树分析方法,其示意如图2所示。
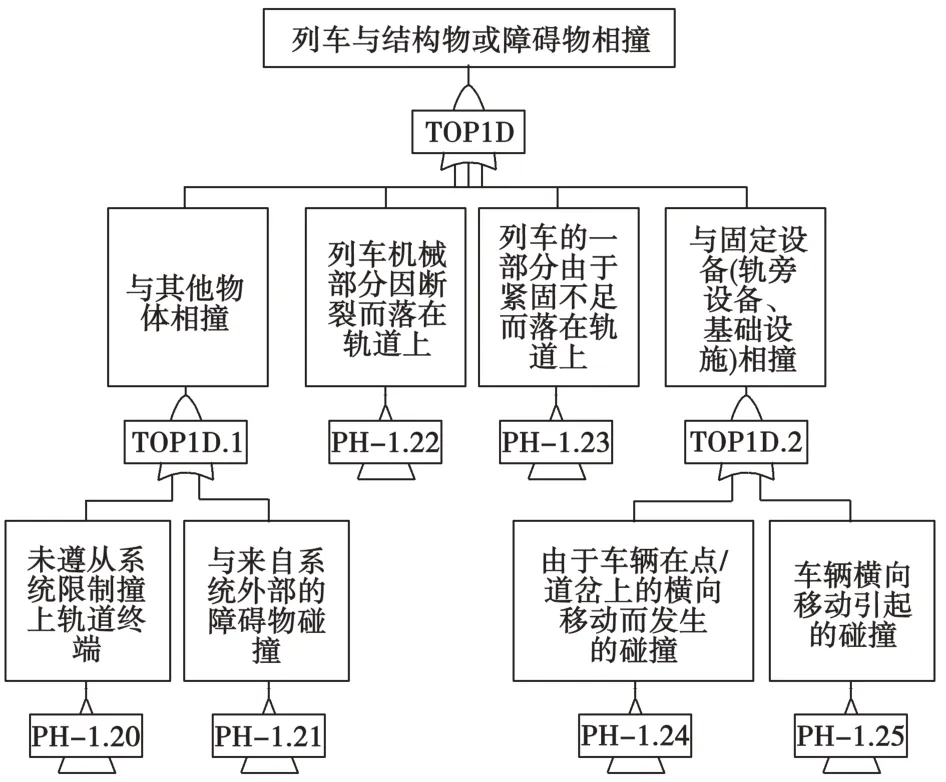
图2 高速磁浮列车系统初步隐患识别故障树示意Fig.2 Schematic diagram of the fault tree for high speed maglev train
高速磁浮列车系统初步隐患分析描述如表3所示。
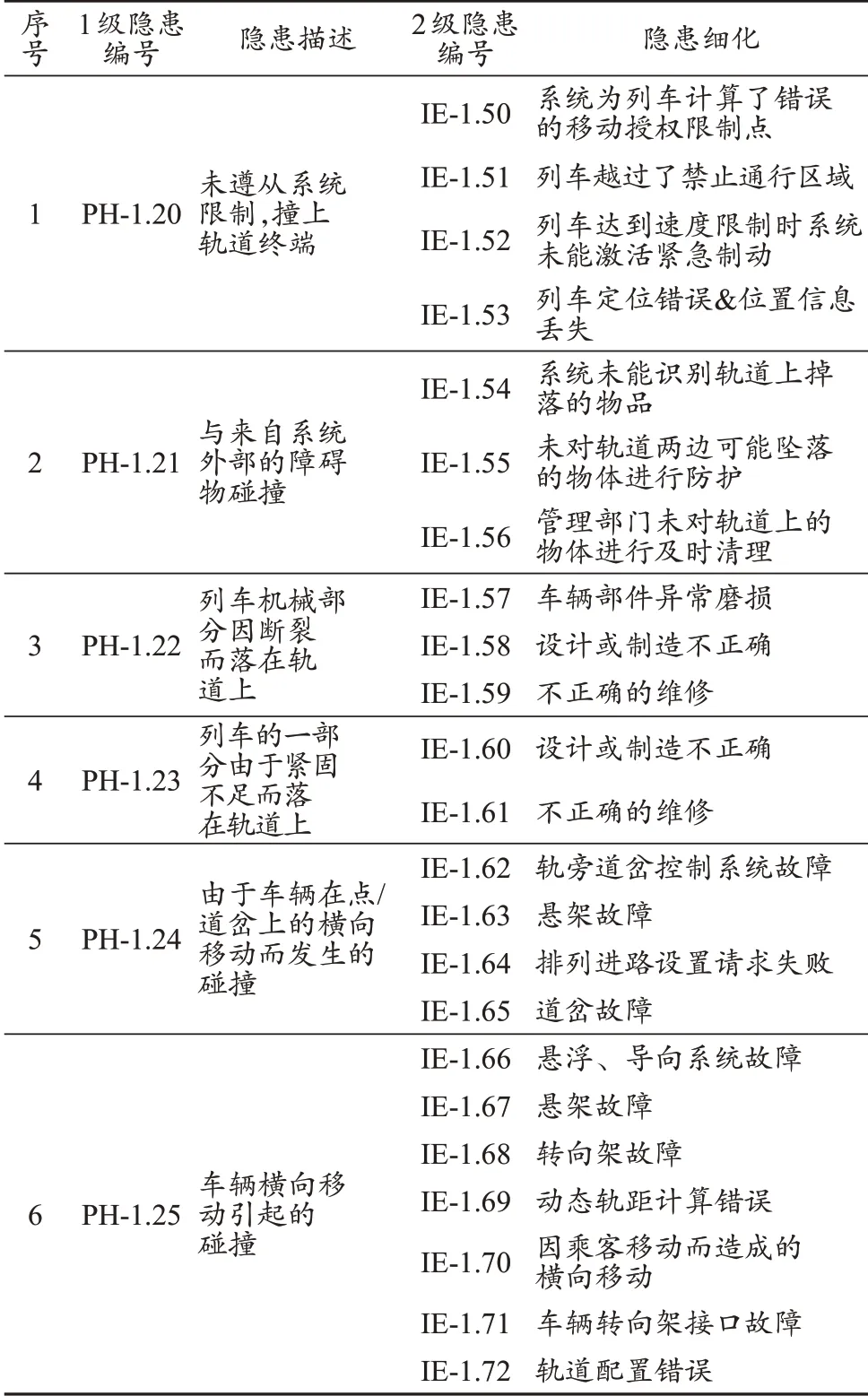
表3 高速磁浮列车系统初步隐患分析Tab.3 Preliminary-hazard analysis for high speed maglev train system
2 常导高速磁浮运行控制系统架构与功能
通过上述需求分析可确定常导长定子高速磁浮运行控制系统的架构和数据流向,形成系统接口技术要求和技术方案。
2.1 系统架构
常导高速磁浮运行控制系统(operation control system,OCS)主要由中央控制子系统(centralized control system,CCS)、车载控制子系统(vehicle control system,VCS)、分区控制子系统(decentralized control system,DCS)及无线电传输子系统(radio transmission system,RTS)[3]4个子系统组成,具体如图3所示。
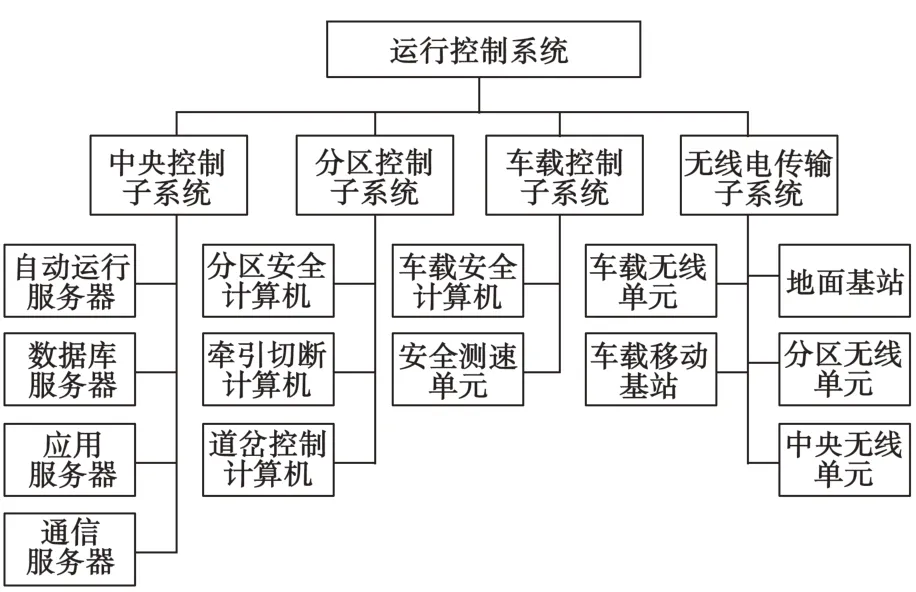
图3 常导高速磁浮运行控制系统组成Fig.3 Systems and equipments of the operation control system in high speed maglev system with long stator and normal conducting
CCS负责全线路列车的调度指挥,包含自动运行服务器、数据库服务器、应用服务器和通信服务器。DCS负责所划定区域的列车安全行车、进路防护、道岔防护和步进控制等,包含分区安全计算机、牵引切断计算机和道岔控制计算机。VCS负责列车速度曲线监控,防护列车最大运行速度、列车状态监控等功能,包含车载安全计算机及安全测速单元。RTS系统实现列车与地面设备的数据交互通信功能,由车载无线单元、车载移动基站、地面基站、分区无线单元和中央无线单元构成。OCS中,分区安全计算机、牵引切断计算机、道岔控制计算机和车载安全计算机4个核心部件是基于中车自主开发的安全计算机平台而搭建的。
2.2 系统功能
OCS包括速度曲线监控、定位功能、列车防护、牵引切断、道岔防护、进路防护、进路请求与步进控制、操作与显示及列车自动运行等9大核心功能。
速度曲线监控是OCS的核心防护功能,它可用于防止列车以超出预定地限速的速度运行。当列车运行速度超过最大或最小运行速度时,系统将触发牵引切断和列车防护功能。牵引切断即对轨旁的牵引系统进行安全切断,当列车运行速度超出最大限速时,会触发列车安全制动功能[3,8]。
定位功能用于安全和准确地确定列车的速度和位置。系统接收来自车辆测速装置采集的列车定位状态、列车位置、列车速度、列车相关的行驶方向、轨道相关的行驶方向和列车方向等信息,并进行安全处理(包括绝对位置校正和相对位置计算)。
列车防护功能是用来监视列车状态和控制列车运行模式的功能。
牵引切断功能是用于在必要时切断列车所在位置的牵引供电电源,列车所在位置不再有牵引电流或制动电流流向轨旁电缆。
道岔防护功能是使系统实时采集道岔状态信息并在调度员工作站上显示。在执行道岔移动请求前,必须由DCS对进路状态进行检查,以判断该请求是否被允许。
进路防护功能是使系统为列车分配轨道,并对其进行安全防护。系统将进路锁闭后,使该道路供指定的列车单独、连续地使用。若要在调度员工作站上实现列车行驶所需轨道区段的闭塞与轨道道岔的锁闭功能,需要应用安全相关的调度指令。
进路请求与步进控制功能是将接收到的驾驶参数进行分解处理,并对列车自动运行功能以及操作与显示功能所发出的命令进行检查,再根据系统运行需要下发列车运行指令。
列车自动运行功能是指系统根据列车运行状况(列车实时速度、相对位移等),将列车运行指令发送给系统对应的执行模块,以减轻调度人员工作负荷,提高列车运行管理的效率,减小人工差错对列车运行的影响。
操作与显示功能负责为调度人员的操作提供人机接口,并显示整个系统的运行状态信息。
2.3 系统接口
运行控制系统与外部系统的接口如图4所示,主要包括:
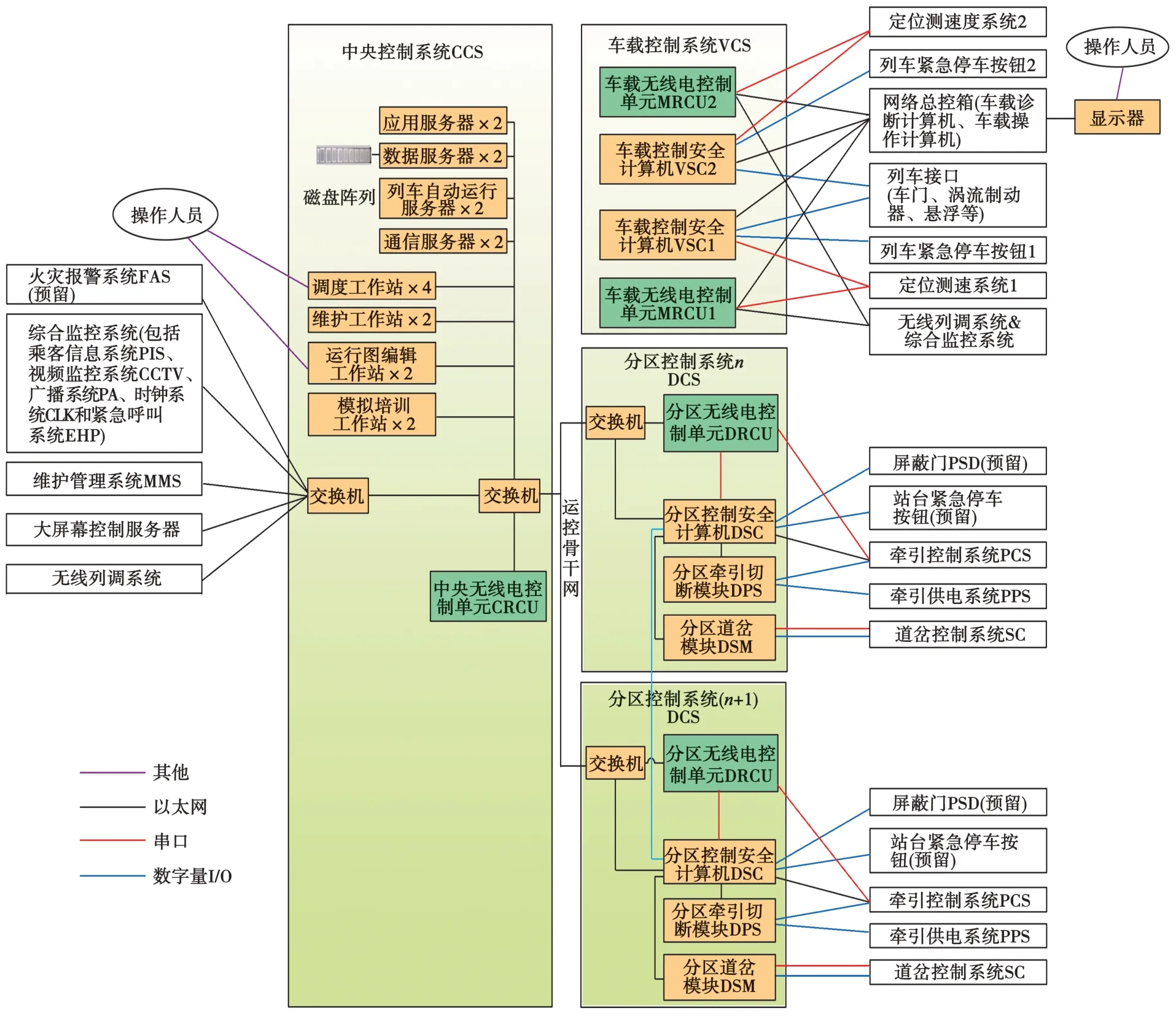
图4 常导高速磁浮运行控制系统接口Fig.4 Interface of the operation control system in high speed maglev with long stator and normal conducting
(1)CCS通过以太网与火灾报警系统FAS、综合监控系统(包括乘客信息系统PIS、视频监控系统CCTV、广播系统PA、时钟系统CLK、紧急呼叫系统EHP)、维护管理系统MMS、大屏幕系统(运控系统与大屏幕服务器接口)、无线列调系统等运控外部系统接口,实现数据传输,为外部运营相关设备提供列车运行的数据。
(2)VCS通过以太网接口、实时以太网接口、串口电流环TTY接口、数字量I/O接口等与运控外部系统(车载诊断网、定位测速系统、车辆悬浮系统、车门等)实现数据的传输;并通过接口获取外部设备状态反馈信息,发出控制指令。
(3)DCS通过以太网、RS485、数字量I/O等接口与运控外部系统(屏蔽门PSD系统、牵引供电PPS系统、牵引控制系统PCS、道岔位置及锁闭传感器与道岔供电驱动单元等)连接,实现数据的传输;并通过接口获取外部设备状态反馈信息,发出控制指令。
(4)RTS通过以太网、实时以太网、同步RS485等接口与运控外部系统(无线列调系统、车载诊断网、定位测速系统、牵引控制系统PCS的MCU)连接,实现数据的传输;并通过上述接口为外部系统提供数据传输通道。
OCS内部接口包括:
(1)OCS通过运行控制核心网,实现CCS与DCS、RTS的时钟同步、数据同步和数据传输。
(2)DCS通过分区安全网,实现分区内部设备的时钟同步、数据同步和数据传输。
(3)DCS通过分区防护局域网,实现本分区与相邻分区安全计算机设备的数据同步和数据传输。
(4)VCS通过以太网环网实现车载安全计算机之间的通信,安全计算机通过以太网与车载无线电控制单元(mobile radio control unit,MRCU)进行连接。
(5)VCS具有以太网、1路CAN总线、2路RS485总线以及若干路数字量输入、输出通道,用于扩展与外部设备的接口。
3 系统试验与验证
为了验证本文所提常导高速磁浮运行控制系统接口及功能的完整性和集成设计方案的有效性,下面开展半实物仿真系统验证和试验线现场验证。图5示出半实物仿真系统示意图。
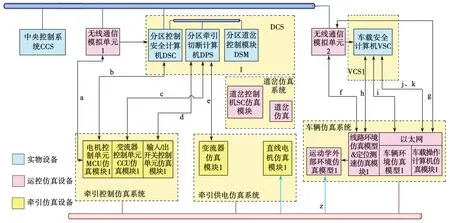
图5 常导长定子高速磁浮运行控制系统半实物仿真系统示意图Fig.5 Hardware-in-loop simulation system for the operation control system of high speed maglev with long stator and normal conducting
3.1 半实物仿真测试验证
在现场验证前,先搭建一个仿真测试平台进行前期集成验证测试,以克服现场测试制约因素,提早暴露系统设计缺陷。半实物仿真验证测试覆盖运行控制系统功能及其与车辆系统、牵引系统等常导磁浮核心系统的接口[10-12],半实物设备与外部仿真测试环境的连接关系如图5所示。
将运行控制系统的最小系统首先应用到实验室进行验证,测试系统的各种性能,降低在实际运行中出现问题的风险,不仅能解决系统集成的验证问题,也能为后续线路的集成和验收提供技术支撑。
从图6可以看出,目前集成设计测试的用例数为645个,通过测试的用例为572例,未通过的用例为73例,测试通过率为89%。
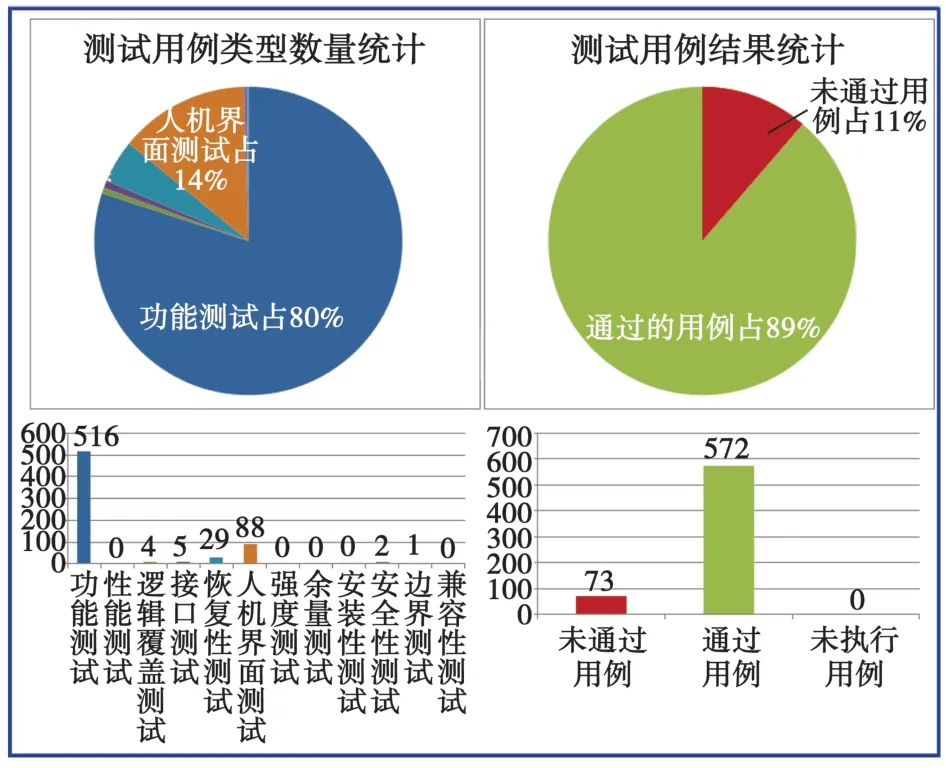
图6 常导高速磁浮运控系统集成测试结果示意图Fig.6 Schematic diagram of integration test results of the operation control system of high speed maglev with long stator and normal conducting
采用集成管理工具软件对问题追踪分析,结果表明,未通过的测试用例均为不具备试验条件的测试用例或不影响系统集成运行核心功能的次要用例,可以在后续的设计中持续追踪和优化。
半实物仿真系统测试结果表明,该运行控制系统的各子系统可实现实验室集成试验环境下的数据交互,以及控制流和状态流的联通和控制逻辑,并实现了子系统之间以及各子系统与仿真环境间的集成协同运行。通过多车多分区仿真运行测试可知,系统能够满足长途多分区复杂环境的运行需要。
3.2 试验线现场试验验证
本系统的现场试验是在上海同济磁浮试验线进行的,按照测试大纲,主要测试内容包括:列车进路超限防护、紧急制动命令、车门的开启授权、列车的状态监控及控制命令、列车运行模式转换及司机驾驶、自动折返、轨道占用检测、停车点步进行车和安全定位。
通过实物大系统进行闭环测试,现场测试用例59个,涵盖接口测试、功能测试、性能测试、运营场景测试、故障注入测试及研究性测试等各个方面,受试验条件限制,未执行用例2个,通过率97%,见图7。现场试验验证结果证明,该运行控制系统的方案、接口、功能完整,集成有效,满足设计需求。
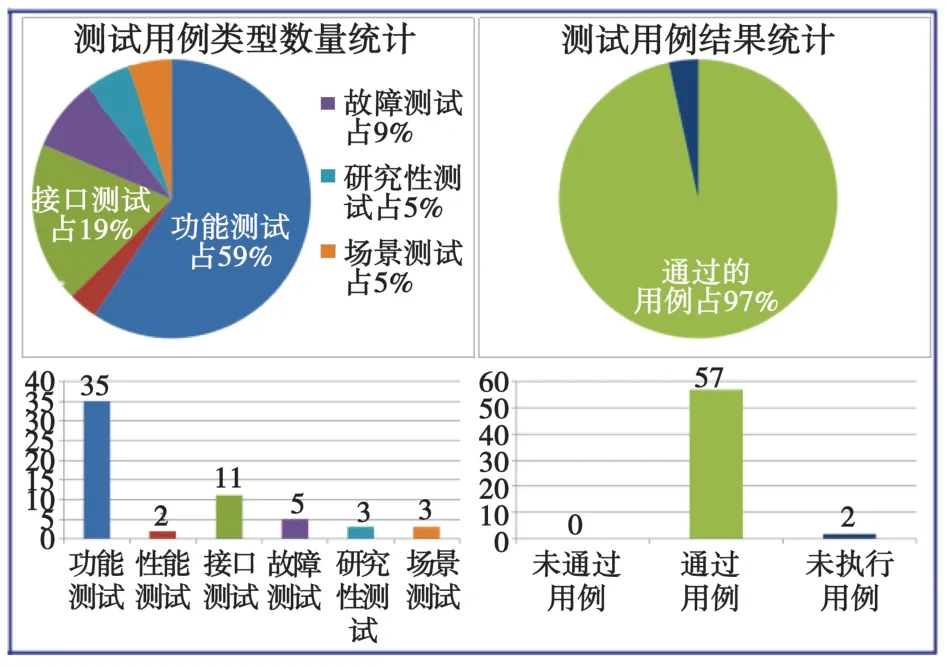
图7 常导长定子高速磁浮运控系统现场测试结果示意图Fig.7 Schematic diagram of field test results for the operation control system of high speed maglev with long stator and normal conducting
常导高速磁浮运行控制系统与传统轮轨交通信号系统在测速定位、轨道占用检知、道岔控制、安全防护和牵引控制等方面存在较大差异,这也是该运行控制系统的创新点和技术难点。在上海同济试验线大系统联合测试中,该技术方案的控制逻辑和方案可行性得到了较好的验证。但受限于该试验线线路短、所积累的实际运行数据有限且目前只有一节编组的列车等因素,该运行控制系统的部分功能(例如多列车情况下的追踪防护)尚不具备测试验证的条件。
4 结语
本文借鉴上海高速磁浮示范线运行控制系统的成熟经验,通过研究系统运营场景,识别安全隐患,采用中车自主研发的安全计算机平台,提出了一套自主研发的常导长定子高速磁浮运行控制系统,并通过实验室半实物仿真测试及试验线现场试验进行验证。试验结果表明,本文所设计的运行控制系统的接口和功能完整,可实现600 km/h磁浮列车控制,满足长距离干线运行的需求。
由于试验线条件限制,目前尚有大量运营场景无法通过实测获取数据。为此,下一步将通过建立实物仿真环境,模拟更长的运营线路等方法,对本文的设计成果进行优化和持续改进。
猜你喜欢
科技视界(2022年10期)2022-05-20
铁路通信信号工程技术(2021年7期)2021-07-27
控制与信息技术(2021年2期)2021-07-23
家庭影院技术(2021年3期)2021-05-21
航天工业管理(2020年9期)2020-12-28
软件(2020年3期)2020-04-20
铁道通信信号(2020年10期)2020-02-07
科技传播(2019年22期)2020-01-14
建材发展导向(2019年10期)2019-08-24
新民周刊(2016年20期)2016-05-25