基于栅格遗传算法的巡检机器人全局路线规划
2022-12-01 06:00王兴涛舒畅李晓金
电子设计工程 2022年23期
王兴涛,舒畅,李晓金
(华能新疆吉木萨尔发电有限公司,新疆 昌吉 831799)
巡检机器人路径规划是在有界的障碍物空间内,寻找出一条由起点指向目标点的近似最优或无界最优路径。栅格类算法是路径规划方面的重要研究内容之一,在实际应用过程中,栅格算法对于环境建模的处理行为相对简单,即使障碍物数量达到一定数值水平,算法应用效率也不会出现明显的降低[1-2]。栅格遗传是栅格类算法中的重要应用形式,如果栅格结构所占比例过大,数据信息的可存储量水平就会不断减小,在此情况下,待规划参量的分辨率数值很难达到理想水平,从而易导致算法自身规划能力呈持续下降趋势。
在全局行进路线规划方面,由于机器人巡检状态的不断变化,实际巡检路径曲线所呈现出的表现形式很难保持绝对平滑的存在状态。传统势场法理论通过适应性函数确定机器人单次行进的路径长度,再根据路径间隙条件,判断规划方法的实际应用能力。然而此方法在全局路线规划方面的细致性水平有限,并不能完全满足实际应用需求。为解决此问题,引入栅格遗传理论,提出一种新型巡检机器人全局路线规划方法,在设置子目标点的同时,分别计算遗传聚度与栅格权重的具体数值水平,再通过行进节点编码的处理方式,实现对规划算子的插入与辨别,联合现有已知条件,计算适应度规划函数的实际约束条件。
1 基于栅格遗传算法的巡检范围确定
基于栅格遗传算法的机器人巡检范围确定包含子目标点设置、遗传聚度确定、栅格权重计算三个处理步骤,具体研究如下。
1.1 子目标点设置
子目标点是机器人巡检过程中所经历的路径节点,能够大体上标注机器人的实际行进方向。一般情况下,当检测到机器人陷入局部行进状态后,其全局规划路径中部必然存在一个标准目标点结构,且随着新子目标点的产生,原有全局路线极易因牵引力作用受限而偏离原始前进方向。子目标点设置则是巡检机器人全局路线规划过程中的必要处理环节,在已知巡检机器人起始行进位置的基础上,可认为终止行进位置的物理坐标数值越大,机器人在巡检过程中所需经历的行进距离也就越长[3-4]。设X0代表巡检机器人的起始行进位置坐标,Xr代表终止行进位置坐标,r表示巡检路线的弯曲度数值,联立上述物理量,可将子目标点设置结果表示为:

其中,kmax表示最大的行进转向系数,表示行进速率均值。
1.2 遗传聚度确定
在栅格遗传算法中,机器人行进停滞早熟系数与最佳路线规划速度存在冲突关系,一般情况下,将这种冲突关系的强弱度称为遗传聚度[5-6]。遗传聚度是一种关键的机器人巡检行进速率约束条件,为了避免机器人的巡检行进行为出现停滞早熟情况,应在保证冲突对立关系的基础上,促进遗传聚度的不断增大,一方面使机器人全局规划路线始终与预设路径保持一致;另一方面也能够实现栅格遗传算法应用能力的最大化保障。在不考虑其他干扰条件的情况下,遗传聚度同时受到全局路线规划强度、行进停滞早熟系数两项物理指标的直接影响[7-8]。全局路线规划强度可表示为β,由于栅格遗传算法的存在,该项物理指标的数值水平越大,遗传聚度指标的计算值也就越大。行进停滞早熟系数可表示为λ,对于遗传聚度指标的计算结果来说,该项物理参量的数值水平总是对最终计算结果起到正向促进作用。在上述物理量的支持下,联立式(1),可将遗传聚度表示为:
式中,e代表行进约束项,代表机器人在全局规划路线中的巡检速率特征值,i1、i2分别代表两个不同的行进偏移系数值。
1.3 栅格权重计算
栅格权重是一项定量型物理应用指标,能够干预栅格遗传算法的实际作用强度,对于巡检机器人来说,在其全局路线规划过程中,该项物理指标能够直接决定机器人设备在单位时间内行进速率的强度值水平。从宏观角度来看,栅格权重对于巡检机器人全局路线规划算法的影响能力极强,且随着算法作用时间的延长,该项物理指标的影响程度也会不断加深,直至能够直接干预机器人行进速率的具体数值水平;从微观角度来看,栅格权重是一个独立存在的系数值指标,在栅格遗传算法的作用空间内,该项物理指标具备干预全局巡检路径分布形式的能力[9-10]。设A1代表第一个栅格系数项,Ar代表第r个栅格系数项,栅格权重可表示为:

式中,μ代表全局规划路线中的巡检行为执行项,λ代表单位时间内的机器人巡检速率强度值。
2 巡检机器人全局路线规划方法
在栅格遗传算法的支持下,按照行进节点编码、算子插入、适应度规划函数确定的处理流程,完成巡检机器人全局路线规划算法的设计与应用。
2.1 行进节点编码
行进节点编码可在已知巡检机器人全局路线规划情况的基础上,将栅格遗传节点安排在固定位置上,并通过更改编码原则的方式,确定机器人设备在巡检过程中的行进偏离程度。在既定路线空间中,待规划的行进节点数量越多,整条巡检路线的完整度水平也就越高[11-12]。设ϕ代表基于栅格遗传算法的机器人巡检节点排列系数,若规定全局路线规划行为具有较强的普遍性,则可认为该项系数的数值水平能够直接决定行进节点编码指令的执行是否成功。设定f代表巡检机器人全局路线的完整度参量,在栅格遗传算法作用下,该项指标参量决定了各级规划节点的偏离度水平,一般来说,行进节点的偏离度越大,巡检机器人全局路线的完整度水平越低。在上述物理量的支持下,联立式(3),可将巡检机器人行进节点编码结果表示为:
其中,ΔT代表巡检机器人行进节点的单位编码时长,P代表全局路线规划指令的执行步长值条件。
2.2 算子插入
算子插入作为栅格遗传算法生成的关键执行步骤,可在已知行进节点编码结果的基础上,确定机器人巡检指令的执行步长值。在全局规划环境中,随着巡检路线的不断延长,已插入规划算子的数量级水平也会不断增大,直至能够与栅格遗传算法的权重指标完全匹配[13-14]。设定s0代表机器人巡检指令执行步长的最小数值,sr代表机器人巡检指令执行步长的最大数值,一般情况下,二者之间的实值距离越大,栅格遗传算子可插入的空间环境也就越广泛。只有在巡检机器人行进均值速度保持为vˉ的情况下,全局巡检路线所具备的可规划能力才最强。在上述物理量的支持下,联立式(4),可将巡检规划算子插入结果表示为:

式中,α1、α2分别代表两个不同的巡检方向度量值,αmax代表α1与α2的最大取值结果,代表全局环境中的机器人巡检行为归类特征值。
2.3 适应度规划函数确定
在全局路线规划问题中,目标函数一般被默认为最短的巡检路径,但随着栅格遗传算法作用强度的不断改变,这种目标路径并不能完全满足全局化路线的实际需求。而适应度规划函数的出现,不仅解决了巡检路径分布不平均的问题,也实现了对全局化需求的有效兼顾[15-16]。设j1、j2、…、jn分别代表全局巡检路线中n个不同的适应度系数参量,在数值n≤10 恒成立的情况下,位数越大的适应度系数值也就越大,联立式(5),可将巡检机器人全局路线的适应度规划函数定义为:
式中,g代表全局巡检路径分布的平均度系数,m代表巡检机器人规划路线的全局规划指标。至此,完成相关参量指标的计算与处理,在栅格遗传算法的支持下,实现巡检机器人全局路线规划方法的顺利应用。
3 实例分析
将图1 所示的巡检机器人置于待测行进路线中,每隔5 min 记录一次机器人所处的实时行进位置,每次的记录数值都由X轴、Y轴两个方向的坐标组成。

图1 巡检机器人的行进能力测试
连接每个时间节点处的X轴与Y轴坐标数值,绘制图2、图3 所示的巡检机器人行进路径曲线。
对比图2、图3,提取固定时间节点处的X轴与Y轴坐标,对其进行仔细校对,得到的详细数值情况如表1 所示。
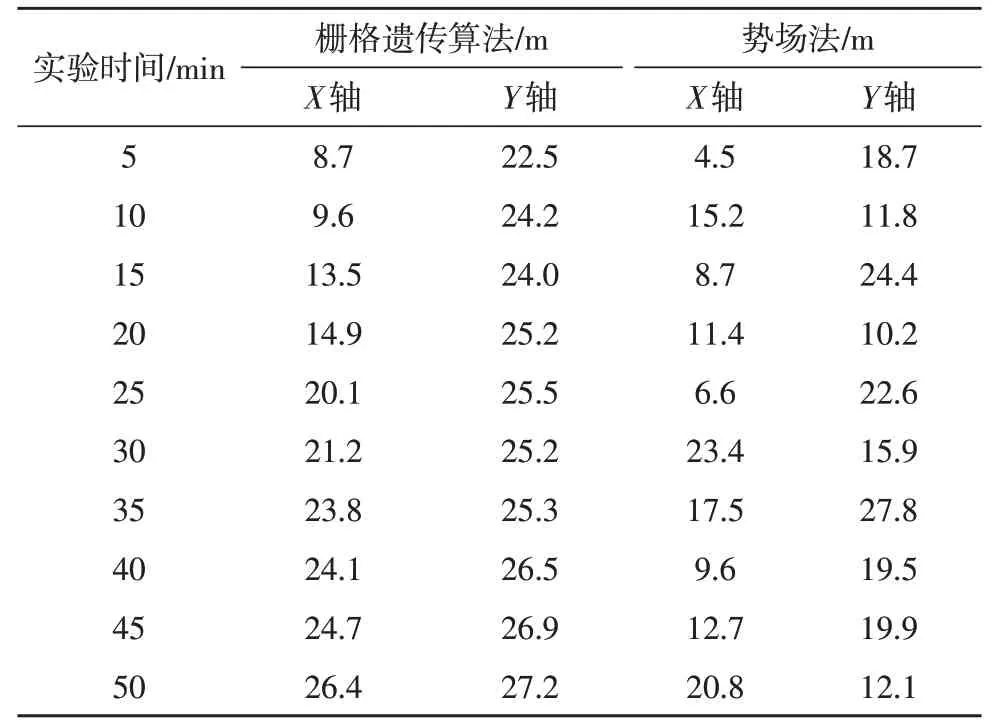
表1 机器人巡检路径坐标
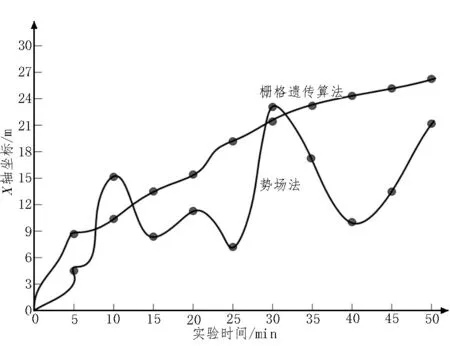
图2 X轴上的机器人巡检路径曲线

图3 Y轴上的机器人巡检路径曲线
分析表1 可知,应用基于栅格遗传算法的规划模型后,机器人巡检路径坐标的X轴分量始终保持不断增大的数值变化趋势,Y轴分量在第30 min 与第35 min之间出现了一次相对较为小幅的下降变化,除此之外,其变化趋势与X轴分量保持一致。应用势场法规划理论后,机器人巡检路径坐标的X轴分量保持先下降、再上升且不断交替的数值变化趋势,Y轴分量的变化趋势与X轴分量基本保持一致,但每一次上升与下降的数值却并不固定。从平稳性角度来看,栅格遗传算法影响下的机器人巡检路径曲线始终保持相对连贯且平稳的变化状态,而在势场法理论影响下的机器人巡检路径曲线则始终保持绝对的波动性变化状态,且其阶段性变化特征表现得较为明显。
综上可知,基于栅格遗传算法的规划策略比较注重全局化思想的体现,随着X轴、Y轴坐标数值的增大,其变化趋势也始终保持绝对平稳的存在状态;势场法规划理论则比较注重对于机器人巡检路径的阶段性布置,随着X轴、Y轴坐标数值的增大,其表达曲线呈现出的波动行为较为明显,不能与精准规划机器人全局行进路线的应用思想完全符合。
4 结束语
在势场法规划理论的基础上,新型巡检机器人全局路线规划方法充分吸收栅格遗传算法应用原理,在设置子目标点的同时,对遗传聚度条件与栅格权重结果进行准确计算,再通过实时编码行进节点的方式,对规划算子进行插入处理。由于适应度规划函数的存在,新型规划方法可在保障机器人巡检路径曲线平滑性水平的情况下,对其全局行进路线进行准确规划,从实用性方面来看,较为符合实际应用需求。未来相关组织单位将以此方法作为着手点,不断研究巡检机器人路径规划领域的其他内容,一方面保障实际巡检工作的执行安全性,另一方面也可实现对相关机械巡检设备的最大化利用。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
中国医院院长(2022年13期)2022-08-15
重庆理工大学学报(自然科学)(2022年1期)2022-02-18
汽车工程(2021年12期)2021-03-08
电子制作(2019年16期)2019-09-27
现代计算机(2019年19期)2019-08-12
电子制作(2019年24期)2019-02-23
金桥(2018年4期)2018-09-26
导弹与航天运载技术(2017年6期)2018-01-29
空气动力学学报(2017年3期)2017-07-03