
动态导航下全牙弓即刻种植即刻修复的现状与关键问题
2022-11-27 11:42孙凤李虹
口腔颌面修复学杂志 2022年6期
孙凤 李虹
动态手术导航是一种通过空间定位跟踪系统,在术中确定手术器械与患者的相对空间位置关系,并与术前CT 及相关口内模型整合显示在一起,进行手术规划,同时实现手术器械的可视化与实时跟踪的手术引导系统。随着导航技术的发展,动态手术导航技术在口腔种植领域也得到了应用,近年来,随着数字化技术在口腔医学领域的发展和应用,数字化辅助下的即刻种植即刻修复(immediate implant placement and provisionalization,IIPP)显现出诸多优势,如基本可以实现以修复及生物学为导向的种植设计、手术术式尽量微创、手术结果较为精准等。本文将对动态导航种植以及即刻修复技术进行了一些经典文献的回顾,并把本团队关于国产迪凯尔导航精度的最新研究与国内外的研究结果比较,说明其现状,且对本团队近年来将口腔种植动态导航技术与数字化即刻义齿修复技术相结合的临床流程及关键技术进行经验总结。
1.动态导航应用于口腔种植手术的背景与技术特点
计算机辅助动态导航技术(computer-aided dynamic navigation,CADN),采用光学跟踪技术定位术区和手术器械尖端空间位置,实现术中实时手术引导。分为主动跟踪及被动跟踪两种类型。前者通过标记点阵列主动发射红外线,被立体摄像机捕捉后计算标记点空间位置;后者则通过装置发射红外线,经回光反射标记点阵列反射后重新被捕捉。从而实时术中引导备洞钻针的位置、角度及深度。
1.1 数字化导航用于种植手术有几个原因:
(1)避让重要解剖结构,如下牙槽神经等。
(2)合理设计,实现微创手术。
(3)以修复与生物学为导向,按适当的间距和角度准确种植设计与精准植入多个植体。
(4)可以提前制作完成临时修复体,减少患者椅旁等候时间。
1.2 与静态导板引导技术相比,动态导航技术具有以下特点:
(1)无需打印实体辅助装置,如导板,避免了导板体积大、耗材大、成本高的缺点。
(2)导航系统可以实时监控,在手术过程中导航能够实时观察到预备钻的三维空间位置,当偏离航道时,术者可以及时发现并修正偏差[1],特别在进行长种植体种植手术时,动态导航避免损伤周围解剖结构的优势体现的更加明显[2]。
(3)导航系统可以灵活调整方案,动态导航系统允许术者在手术过程中依据具体情况对手术设计进行实时的改动[3]。
(4)导航下种植利用口腔空间较小,尤其适用在张口度较小的后牙区种植,而导板的应用则受到了导板厚度,套管长度等限制。
(5)动态导航与静态导板误差值接近,静态导板的制作使用过程中,从CT图像采集,软件中导板的设计制作和导板佩戴就位每个过程都会产生偏差,虽然有些偏差可以通过规范操作避免,而有些偏差则是无法避免[4]。动态导航工作流程包括几个步骤:图像获取及处理、虚拟种植手术规划、注册、配准与外科手术,其误差可能会发生在每个步骤,并也可能产生累积,虽然一些偏差可以通过软件更新系统校准等操作降到最低[5],一些误差可以通过导航配准减小误差[6],在笔者近4年的临床使用中,认为这些误差虽然临床可以接受,但也需临床研究不断提高精度,减少误差。
(6)种植导航手术过程较为复杂,新手医生难以适应将手术视野从患者口内转移至实时三维影像屏幕,需要在体外进行种植练习,习惯直视屏幕获取术区三维空间位置信息,习惯临床操作手感,增加使用经验。随着种植次数的增加,种植偏差逐渐减小,在19~20 次种植之后明显减小并趋于稳定[5,7,8]。
(7)导航下即刻种植即刻修复的临时修复体可以提前完成或部分提前完成,减少种植即刻修复椅旁等候时间。
2.种植导航手术精度研究现状
Block等[9]对478例患者共714个种植体的前瞻性数据进行了评估。对于全程导航,平均角度偏差为(2.97±2.09)度。平均整体位置偏差为(1.16±0.59)mm。平均根尖位置偏差为(1.29±0.65)mm。半程导航的平均角度偏差为(3.43±2.33)度。平均整体位置偏差为(1.31±0.68)mm。平均根尖位置偏差为(1.52±0.78)mm。对于自由手种植,平均角度偏差为(6.50±4.21)度,平均整体位置偏差为(1.78±0.77)mm,平均根尖位置偏差为(2.27±1.02)mm。
笔者团队马斐斐等[10]与裴喜燕等[11]也对国产迪凯尔导航的精度进行不同方法的精度研究,其结果与上述学者报道精度数值虽有差异但基本接近,研究显示:导航均有一定误差,但目前临床可以接受。
赖红昌等[12]对多牙种植体的体内外研究进行meta分析,结果显示:平均颈部偏差、顶点偏差和角度偏差分别为1.02 mm(CI:95%[0.83,1.21]),1.33 mm(CI:95%[0.98,1.67]),3.59°(CI:95%[2.09,5.09])。元回归分析显示,模型研究和临床试验(P=0.295,0.336,0.185)、钻孔和植入(P=0.36,0.279,0.695)、上颌骨和下颌骨(P=0.875,0.632,0.281)以及五种不同系统(P=0.762,0.342,0.336)之间没有差异。对种植体的体内外研究进行meta分析模型研究和临床试验之间的差异无统计学意义,模型误差值小;窝洞预备和植体植入研究方法结果无统计学差异,植体植入误差值小;上下颌无统计学差异,下颌术野更好;不同种植系统得出的数值不同,但结果并无统计学差异,不同种植系统无统计学差异,但数值存在差异。最近学者刘晨曦[13]也做了同样的临床种植精度meta分析,结论是静态导板与动态导航在种植植入点、根尖点与角度精度基本一致,在植入深度上精度更高些。
3.全牙弓即刻种植即刻修复现有技术回顾
对于无牙颌患者或者终末期牙列或者种植支持全牙弓即刻修复体制作,目前常用有三种制作模式:模式一:自由手种植,术后过渡义齿上人工打孔,口内进行与临时基台粘接、修整、完成;模式二:自由手种植,术后制取印模转给技工室进行传统义齿制作后转回戴入;模式三:数字化导板下种植,按照数字化设计的种植体的三维位置提前完成开孔的全牙弓临时修复半成品,开孔位置与导板一致,种植手术后口内进行与临时基台粘接、修整、完成。
现有全牙弓即刻修复技术存在以下缺点:
3.1 模式一 自由手与过渡义齿开孔误差大,需要大量术中手工调整,费时费力,不推荐。
3.2 模式二 缺陷有三:(1)自由手无法精准实现修复与生物学为导向;(2)印模缺陷:口内传统印模:术后即刻印模制取增加了手术创口污染的风险;口外扫描印模:目前除了口外扫描也必须再次口内扫描获得黏膜数据,操作复杂,并因术后伤口出血影响扫描精度;(3)临床操作从制取印模,制取颌位关系,试牙,到戴牙,操作复杂,义齿制作需要时间长,所以患者椅旁等候时间长。
3.3 模式三 目前导板下种植,提前完成开孔的全牙弓临时修复体,种植精度决定修复开孔误差与临床修复的复杂程度,(1)但当导板(如患者张口度限制,或者术中需要调整种植部位与数量)无法使用,即刻修复无法顺利完成。(2)终末期牙列多级导板误差较大,即刻修复开孔误差大,椅旁修整时间增加。(3)无牙导板如果其放射导板为黏膜支持式,则误差太大,即刻修复开孔误差大,椅旁修整时间增加。(4)截骨或植骨病例即刻修复全牙弓义齿牙龈端与黏膜离开,术中开孔的全牙弓临时义齿与口内临时基台就位时,术者握持义齿不方便,特别是义齿粘接时控制垂直距离的操作不方便,此时可以在全牙弓临时义齿设计与制作时建议增加前部握持装置以辅助术者握持义齿(如图8)。
4.动态导航与全牙弓种植即刻修复结合的流程与关键技术
4.1 迪凯尔种植导航与全牙弓即刻修复的技术流程
4.1.1 术前准备(1)终末期牙列制取口内原有未拔牙或者拔牙后制作戴入活动诊断性(颌位关系与垂直距离正确的旧义齿也可)的临时修复体,酌情制作成放射导板,无牙用全树脂临时义齿(颌位关系与垂直距离正确的旧义齿也可)制作放射导板,用义齿粘固剂将义齿粘固于口内,拍摄CT,然后制取数字印模(固位好的义齿也可以制取传统印模);(2)按照诊断性修复体设计好的颌位关系与垂直距离进行种植修复体设计,然后以修复与生物学为导向进行种植设计与手术计划;(3)即刻全树脂修复临时义齿设计与制作,按照垂直距离的覆关系设计下前牙唇侧把持装置,按照数字化植体位置与角度在义齿上开孔,术前消毒备用;(4)导航下种植手术:植入放射钛钉,拍摄开口位CBCT图像与术前设计数据融合。
4.1.2 动态导航下的种植手术(1)导航注册与配准;(2)根据导航屏幕上的多角度,三维度导航图像进行种植体植入,按计划完成种植手术;(3)开孔的即刻修复体的试戴调整,用重衬法与临时基台粘接带入。
4.2 导航下全牙弓即刻种植即刻修复的优势
4.2.1 数字化优势同导板
(1)实现以修复与生物学为导向的种植设计。
(2)提前完成开孔全牙弓诊断性临时义齿,提高临床效率。
(3)全牙弓固定桥临时修复设数字化计与制作时可以增加把持装置,辅助义齿定位与垂直距离的确定,增加操作便利性。
(4)保留终末期牙列的部分牙齿,可方便设计与提高种植手术的精度。
4.2.2 导航种植手术可进行备选方案设计,方便术中按备选方案调整,如:调整种植体位置与数量,调整后可以按备选方案调整义齿开孔位置。
4.2.3 导航下即刻种植可以参考自由手在拔牙窝内偏腭侧预备的方法进行预备。
4.2.4 导航精度越高操作越简便,导航植入与即刻修复临时义齿的就位可以互相验证精度。
4.3 导航下全牙弓即刻种植即刻修复临床操作关键技术
4.3.1 术前进行诊断评估,按咬合重建检查与诊断关节与肌肉,确定颌位关系与垂直距离,即刻修复体尽可能维持原有关系,减少即刻修复可能出现的咬合与关节问题。
4.3.2 尽量保留部分不松动或者松动度小于II°的牙齿,牙齿尽量分散,作为CT 与模型融合的数据,减少数据融合误差。
4.3.4 放射导板的固位与稳定非常重要,其对导航的精度影响较大,建议使用义齿粘固剂粘固放射导板。
4.3.5 全牙弓即刻义齿穿出孔直径设计参数
即刻义齿穿出孔主要作用是为全流程误差做出补偿,当患者口内形态特征缺乏,余留牙稳定性较差,植体数目较多(如单颌6 颗植体)等导致流程精度下降的因素存在时,建议将穿出孔直径扩大1 mm;反之,当口内形态特征丰富,余留牙稳定,植体数目小于等于4 颗时,建议将穿出孔直径扩大0.5 mm。义齿就位后,其与植体临时基台间隙通过自凝材料重衬封闭。
4.3.6 全牙弓即刻义齿形态设计要点 穿出孔周围保留1~2 mm 厚度,避免义齿断裂;龈方设计卫生桥,微凸向下,利于清洁;唇侧增加握持结构,辅助义齿放置。
5.典型病例
5.1 基本情况 患者,男,38岁,全身情况:健康。因重度牙周病拔除大部分牙齿,关节肌肉无异常。治疗方案:拔除上下颌全部牙齿,全牙弓种植固定修复。治疗步骤:保留松动I°的13、23、33、43与近中倾斜不松动的18、28、38、48,作为导航数据融合用,术前完成诊断性临时修复体(图1),与患者沟通分上下颌二次完成手术,先行下颌导航下即刻种植即刻修复。

图1 术前口内相
5.2 术前准备 术前制取CBCT(图2)、制作印模(图3)、复制诊断义齿外形,导入种植设计软件后进行坐标重叠(图4),进行以修复与生物学为导向的种植手术规划(图5),并将诊断性临时义齿、人工牙、种植体三维形貌数据导出(图6);在Geomagic 2013(美国)软件中设计基台穿孔位置(图7),调整义齿龈方形态,同时增加辅助握持装置,完成种植即刻义齿设计(图8、图9);数控切削加工完成即刻义齿的制作。

图2 术前CT

图3 下颌模型
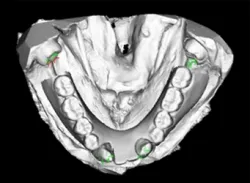
图4 模型义齿配准

图5 种植手术方案设计
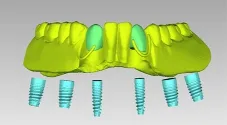
图6 义齿、人工牙及种植体数据导出
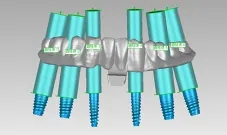
图7 临床基台穿出孔定位
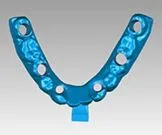
图8 即刻义齿面观

图9 即刻义齿唇面观
5.3 导航下种植术与术后精度 在种植导航系统引导下进行种植体的植入(图10),安放临时基台(图11),即刻义齿重衬与戴入(图12)。

图10 导航下植体植入

图11 临时基台就位

图12 即刻义齿试合
术后即刻CBCT 见图13。种植精度测量图见图14、图15。

图13 术后即刻CBCT
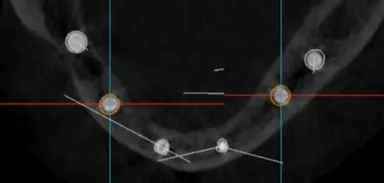
图14 种植精度测量-水平面
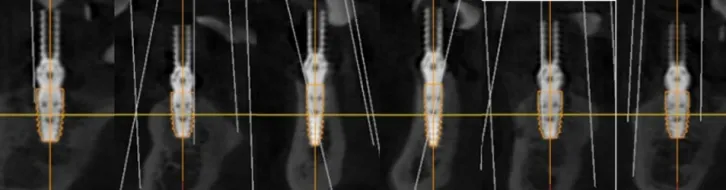
图15 种植精度测量-轴面
5.4 即刻种植的植入点误差大(即:植体移位)的原因分析 即刻种植一般存在拔牙窝,导致植体唇侧水平向大于180°的骨缺损,预备钻的直径小于植体直径,唇侧骨缺损区域植体受腭侧单侧力引起唇侧移位。
5.5 本病例42 误差大的原因分析42 远中为拔牙窝,偏近中骨面扩大预备弥补量不足,按导航植入后植体颈部向拔牙窝倾斜,造成位移而增加了误差。
5.6 即刻种植减少植入点误差(植体位移)的方法
5.6.1 设计弥补误差法 即刻种植体设计时,可提前预计误差,按骨密度植入点偏腭侧(偏拔牙窝)定点:偏移距离为预备钻内核直径与预备钻直径差值,一般术中根据骨密度酌情偏移0.4-0.7 mm。具体按种植系统提供预备钻的内核直径与钻直径为准。
5.6.2 预备弥补误差法 将(唇侧)骨缺损长度以上的对(腭)侧骨面,加预备一钻,选择与植体直径相同的预备钻,按导航指示进行预备,预备深度到唇侧骨缺损处:即非全程预备,如图16。临床推荐用导航下手术预备弥补法避免误差,这也是导航应用于即刻种植的优势之一。

图16 预备弥补误差示意图:用植体直径的预备钻,沿着植体中心位置预备到骨缺损处
猜你喜欢
四川冶金(2021年6期)2021-02-15
消费导刊(2021年1期)2021-01-27
口腔医学(2020年12期)2021-01-06
精准医学杂志(2020年5期)2020-10-28
锻造与冲压(2020年5期)2020-03-18
中国医药指南(2019年12期)2019-05-27
中华老年口腔医学杂志(2016年3期)2017-01-15
中国继续医学教育(2015年5期)2016-01-07
中国医疗美容(2015年2期)2015-07-19
中国医疗美容(2015年2期)2015-07-19
