
北斗导航终端射频接收电路的设计与实现
2022-11-23 09:59杨华炜
电气传动自动化 2022年6期
杨华炜
(福建福大北斗通信科技有限公司,福建 福州 350100)
全球卫星导航系统(Global Navigation Satellite System,GNSS),负责实现全球的定位、导航和时间校准,其包含了三个部分,分别是全球系统、区域系统和星基增强系统。
全球卫星导航系统特点鲜明,具有准确程度高、智能化程度高、经济效益高的特点,能够全时段、全范围工作,是国家的经济、国防和信息化的基础,能够展现一个国家的综合国力和科技实力。其核心作用是进行位置匹配、基准时间校正以及一切与定位、授时相关的实时信息显示。由于北斗一代RDSS卫星定位系统在工作原理上具备一定的特殊性,能够实现短报文的发送与接收,这就保证了用户在对自身进行定位的同时还能够实时反馈自身的位置和其他信息。定位技术在很多领域都有着十分广泛的应用,比如铁路运输、远洋运输、航空运输、气象监控、农业生产、应急管理等。北斗一代产品最起初的应用是为了远洋船舶的定位导航,实现海岸主控中心对远洋作业船只的有效监控,保证远洋作业船只的安全及作业船员的人身安全。
1 低噪声放大器
1.1 噪声优化技术
噪声系数可以基于两端口网络进行技术分析,这样就能够保证在不了解网络内部结构和内部噪声源的情况下,实现对噪声特性的分析,噪声模型图如图1所示。

图1 两端口网络通用噪声模型图
根据相关参考文献可以得到如下式子:

从式(1)可以得出,两端口网络的噪声性能可以由 Fmin、Rn、Gopt、Bopt四个变量来表达。为了尽可能地限制噪声,需要使源阻抗和最优阻抗的数值匹配在特定状态,传输功率极限值也必须和最优阻抗的数值匹配在特定状态。普遍情况下这两个关系参数值是完全不一致的,所以无法保证噪声系数和传输功率这两个参数同时处于最优值,需要根据实际情况进行合理调控。
基于COMS工艺进行LNA设计时,针对小型便携设备提出了不仅噪声系数要小并且设备功耗要低的要求。鉴于低噪声放大器通常采用电感源级负反馈结构,所以通常基于该结构进行噪声优化。
用Qopt、Qs等品质因数可表示 Gopt和 Gs:
基于上述公式及两端口网络参数可得出噪声系数函数为:
其中,a、gm、Qopt、Qs都与功耗有关,MOS 管的漏极电流表达式为:
表达式中:
其中,Cox参数为单位面积上栅氧化层电容参数值,μn为载流子的运动率参数值,Esat是顺着沟道方向的载流子运动速度以半速度走行时在水平方向的电场参数值,Vod=Vgs-Vt为驱动栅极工作的电压值。这样可推导出功耗参数的表达式为:

另外有:

综上所述,噪声系数是基于参数ρ和PD作为自变量的函数。假设电路以高功率状态运行时,那么该状态下的ρ参数与1相差很远,由此推导最小的噪声系数时需要满足如下条件:

将式(10)代入到式(9)进行化简,则可得到有功耗约束时对应的最小噪声系数Qs为:

当确定了QsP后就可以得到噪声最优器件的沟道宽度表达式为:

从而得到在功耗约束范围内的噪声系数为:

在进行低噪声放大器设计时,利用以上方法能够实现功耗较低、噪声较小。
1.2 共源共栅LNA电路
低噪声放大器在设计上采用了共源共栅结构,这样就能够保证输入输出端的隔离性和输入输出端的增益倍数及良好的噪声特性。其中,MOS管采用了差分形式,两个差分结构的MOS管能够将初始电压信号变换为电流信号,能够维持其增益度。MOS管具有对调谐输入和调谐输出相互影响的抑制作用,这样就保证了输入端口和输出端口之间被阻隔而不会发生相互影响,从而保证了由MOS管栅漏电容Cgd所引起的密勒效应减弱。电路中的谐振部分由两个差分电感组成,这样既可以保证低噪声放大器的负载,又能以低通滤波器的形式存在。
单边低噪声放大器的设计重点需要放在输入匹配上,因为只有电路参数达到最佳匹配状态时,才能实现放大器的噪声参数最合理。完全忽略网络情况时的输入阻抗可以定义为:

1.3 低噪声放大器的模块设计
本文所研究的低噪声放大器在设计上采用了三级放大结构,器件选型十分关键,特别是输入的第一级电路中的放大部分和滤波部分,本级噪声指标直接影响到整个噪声放大器的质量性能。
本文设计的低噪声放大器,其三级结构分别采用Avago管子、ATF-34143噪声晶体管、HMC286集成低噪声放大器。
放大器噪声系数的级联公式为:

根据上式可以初步计算出外置LNA的理论噪声系数。
2 变频混频器
本文所设计的变频混频器采用了基于吉尔伯特的双平衡电路。
2.1 变频混频器的核心电路
Gilbert变频混频器的核心电路包括了三个级别,即跨导级别、开关级别和负载级别,其整体结构如图2所示。
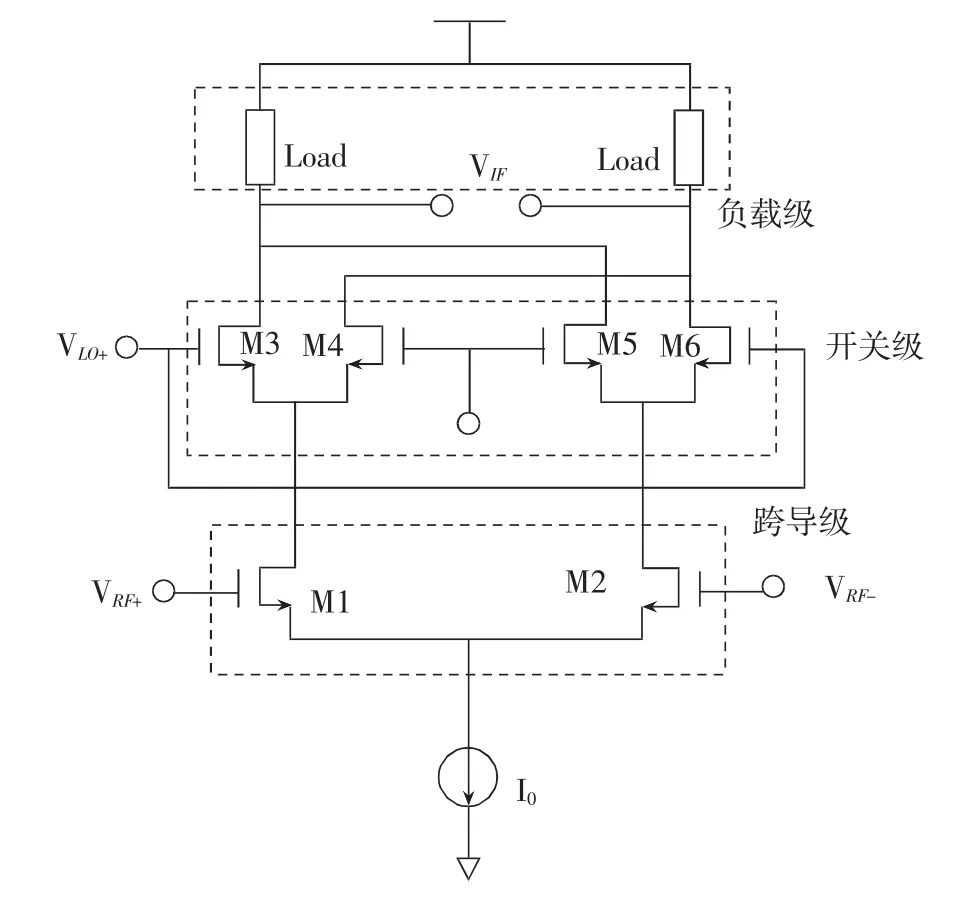
图2 整体结构
(1)跨导级的设计
跨导级中MOS管电路的作用是完成电压信号与电流信号的转换,其与混频器的线性度直接关联,并且和负载共同影响混频器的转换增益参数。由于跨导级和文中开始研究的低噪声放大器的输入结构无差别,因此Gilbert混频器的输入可以认为是低噪声放大器。

由于本文设计的变频混频器是作为低噪声放大器的负载,所以混频器的输入源阻抗本质上可以认为是低噪声放大器的输出阻抗。
(2)开关级的设计
跨导级直接影响混频器的线性参数,而开关级直接影响混频器的噪声参数,因此提高LO的功率能够优化混频器的噪声效果。降低偏置电流的值能够优化噪声效果,如果偏置电流过大则会导致噪声特性变差。因此要保证信号驱动足够强,应使差分管运行在较优的开关特性下。
在基础信号作用下,为了保证NMOS管处于正常工作状态,就需要控制NMOS管位于NMOS管截止区边缘部分。当基础信号对M3~M6发生作用时,就能保证两个NMOS管在恰当时候工作在饱和区,同时另外两个NMOS管处于截止状态。在基础信号的驱动下,这两对NMOS管以开关对形式交替导通和截止。
2.2 变频混频器输出级电路
变频混频器的负载结构比较简单,性能可靠,对非线性现象有较好抑制作用,并且带宽也满足要求,其转换增益表达式为:

从式(17)可以看出,有两种方法可以提高转换增益,即提高负载电阻值或增加直流偏置电流。选用大阻值电阻会引发电压余度降低,会进一步导致晶体管进不了饱和区,并且由于电路存在电流源结构,从而会对线性参数产生影响。
为了保证电压余度足够且同时提高增益,将MOS管作为负载就能够实现二者的兼顾,改进后的电路如图3所示。

图3 电流注入电路
这两种电路的优点鲜明,能够在负载电阻工况下实现电压余度与转换增益的双重保证。图3为电流注入电路,会引起输入MOS管漏极的寄生电容增大,并且与电阻复杂情况相比,线性程度也不够好。图4为电流源负载电路,其必须与共模反馈电路配合应用,因此其电路结构的复杂程度更高。

图4 电流源负载电路
2.3 变频混频器的偏置电路
前面所提到的核心电路和输出级电路都必须保证三个部分的电路都与偏置电路配合工作。电路与电压偏置电路配合时,通过漏极电流与栅源电压之间的关联性,发现MOS管漏极电流的变化率与栅源电压值之间呈现平方关系。所以与电压偏置电路配合情况下,会引起其漏极电流的大幅度变化,同时跨导级的线性参数、噪声参数等都会被影响。
本文设计的吉尔伯特混频器电路由芯片自主产生偏置电压,同样可以实现与电流偏置电路相配合,这种配合方式能够提供稳定的电流给跨导级电路。
3 仿真分析
在仿真环境下,设定电源电压为3.3V,设定输入的射频信号频率为2491.75MHz,基础信号设定为479.75MHz,则能够得到中频信号为12MHz条件下的混频器输出特性分别如图5和图6所示。
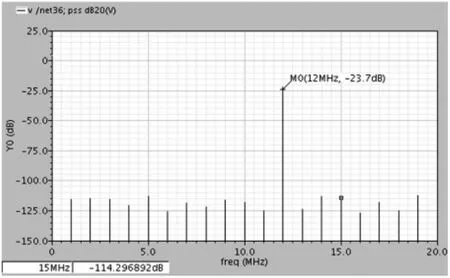
图5 混频器中频输出频域特性
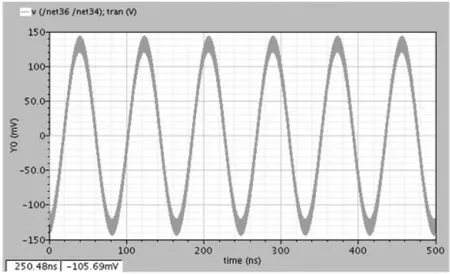
图6 混频器中频输出时域特性
图7和图8分别为噪声系数和转换增益的仿真测试结果图。当中频输出为12MHz时,噪声系数能够达到 20.47dB,转换增益能够达到 11.35dB,输入IIP3交调点为6.82dBm,仿真结果完全满足了性能指标要求。
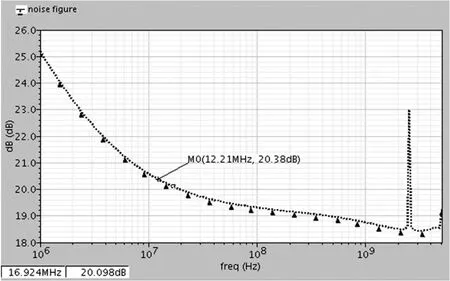
图7 噪声系数仿真结果
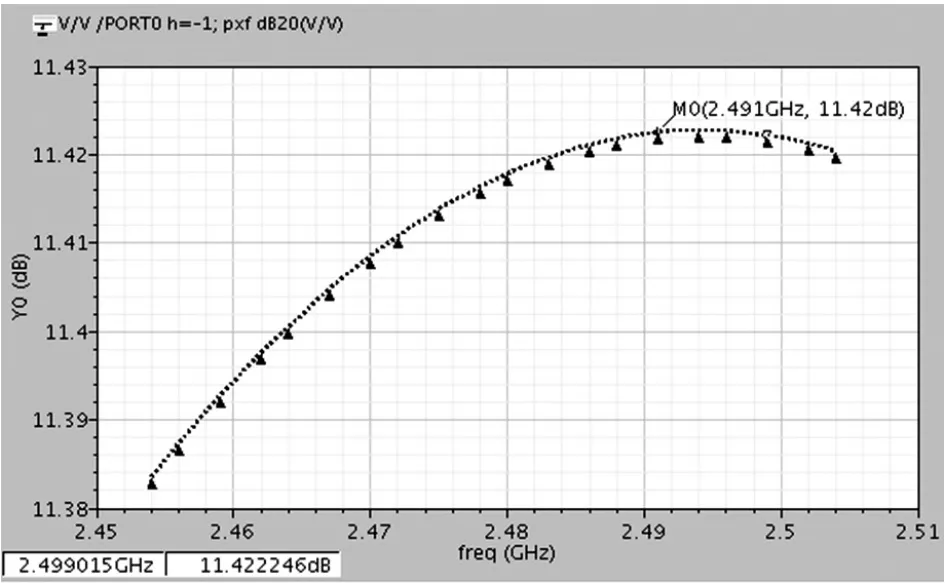
图8 转换增益仿真结果
4 结论
北斗卫星导航系统将在全球通信领域发挥重要作用,所以对北斗系统的终端射频电路进行深入研究意义重大。而射频芯片技术的关键就在于两个部分,即低噪声放大器和变频混频器。本文研究了基于差分输入和差分输出的低噪声放大器工作原理,设计了低噪声放大器并进行了设计验证测试,也设计了基于吉尔伯特结构的双平衡混频器。仿真结果表明,本文所进行的设计完全满足系统性能指标要求。
猜你喜欢
成都信息工程大学学报(2021年4期)2021-11-22
数字通信世界(2020年5期)2020-06-15
数字通信世界(2020年3期)2020-04-06
雷达与对抗(2019年4期)2019-03-10
计算机与数字工程(2019年1期)2019-03-01
吉首大学学报(自然科学版)(2018年2期)2018-05-17
电子制作(2017年7期)2017-06-05
舰船电子对抗(2016年3期)2016-12-13
浙江大学学报(工学版)(2016年9期)2016-06-05
电测与仪表(2016年8期)2016-04-15
