
基于骨肌建模的上肢运动肌肉力估计研究
2022-11-23 12:06张争辉董双鹏马金竹天津市医疗器械质量监督检验中心天津300384
中国医疗器械信息 2022年19期
张争辉 董双鹏 马金竹 天津市医疗器械质量监督检验中心 (天津 300384)
内容提要: 人体运动的动力之源是肌肉力,在康复治疗中,人体肌肉力及关节力矩也是衡量人体运动功能的重要参数,这些参数的确定对人体运动康复具有重要意义,但其本身大小无法进行直接测量。文章通过对人体上肢模型简化,建立合适的数学模型,并通过逆动力学原理对上肢运动进行分析,建立针对性的骨肌系统模型仿真人体运动,计算肌肉力及关节力矩的大小,并对其进行分析。
当今社会,随着人们的工作压力越来越大,肩周炎患者的数量也逐年增加。调查表明,近三年上肢运动功能障碍者数量增加了15%以上,并且逐渐年轻化。但目前对于运动功能障碍的治疗和科学的评估还不够完善,大多数都是以人们的直观运动能力或者患者的主观疼痛感作为评定依据,缺少科学的界定。现阶段,很多国家已经建立了本国的人体骨肌模型,为人体运动功能的治疗和诊断提供依据,我国也有了自己的骨肌模型,但还没有建立针对患者的骨肌模型,并不能对医疗提供良好的科学依据[1]。
肌肉力的研究已经成为人体运动控制、骨肌损伤与防护以及人工关节设计等研究的一部分[2]。例如,肌肉力的研究有助于关节力大小的预测,通过对正常关节和患病关节的功能比较,研究患病关节的发病机制,为关节假体和关节手术治疗方案的设计提供理论依据,并且通过对肌肉力的分析,了解关节的功能障碍情况,从而为不同患者设计更具针对性的治疗方案。直接进行肌肉力测量存在很多局限,通过测量人体运动信息,并建立骨肌系统模型仿真人体运动,采用合适的数学模型理论计算肌肉力大小是当前计算肌肉力的主要方法[2-5]。
本文对人体上肢模型进行简化分析,建立合理高效的数学模型,并进行理论分析构建骨肌模型仿真人体运动,通过逆动力学原理对人体运动过程中的肌肉力以及关节力矩大小进行了计算,从而为运动障碍患者的治疗和诊断提供科学依据。
1.建模方法
1.1 肌肉模型
肌肉模型采用Hill三元素肌肉模型,如图1所示。该模型由3个主要元件组成,分别是串联弹性元(SE)、并联弹性元(PE)和收缩元(CE)。其中,lmt为肌腱和肌纤维的总长度,lt为肌腱长度,lm为肌纤维长度, 为肌肉纤维束与肌腱的夹角[3]。
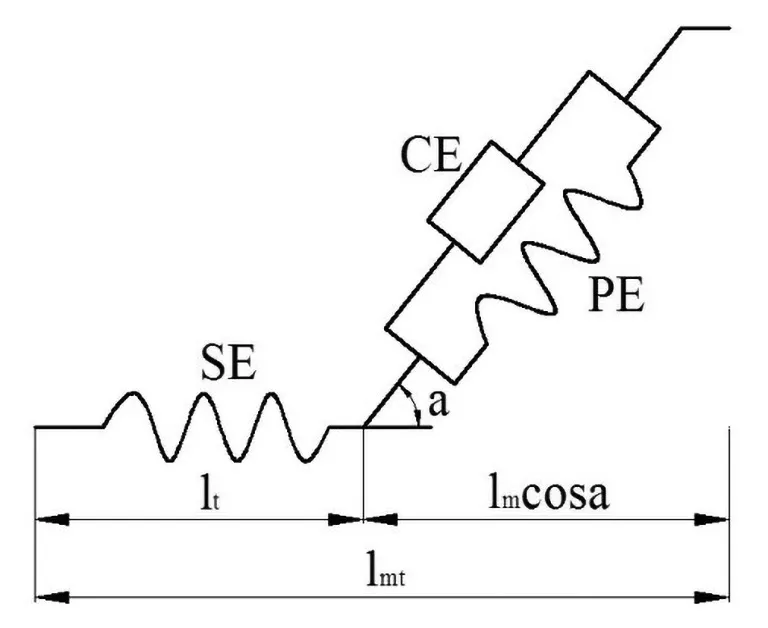
图1. Hill三元素肌肉模型
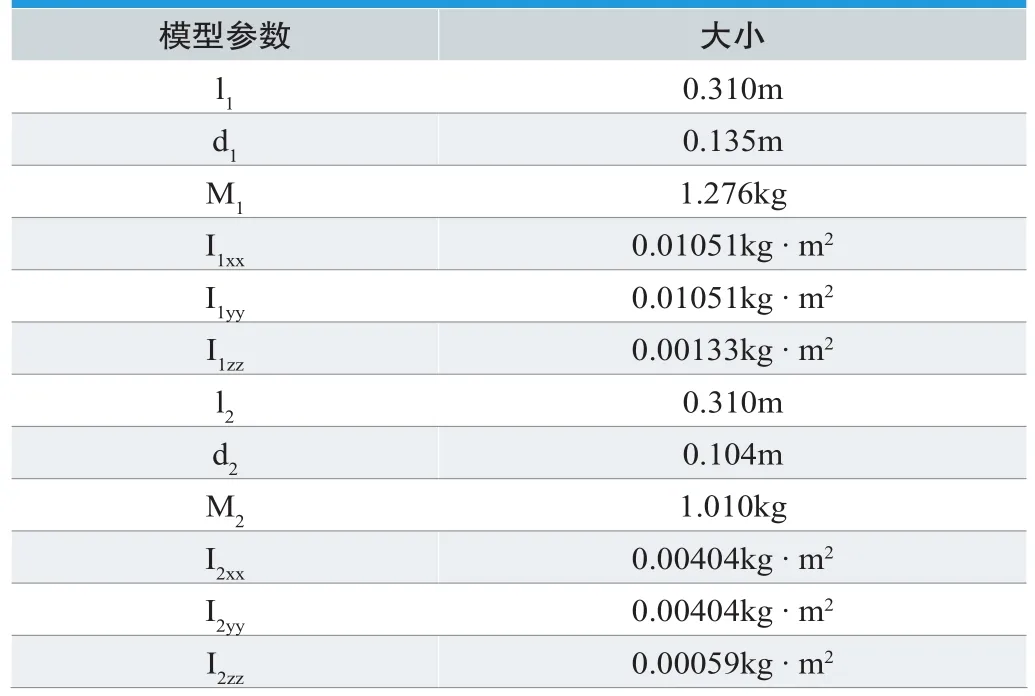
表1. 上肢简化模型相关参数
1.2 骨肌模型
上肢简化结构图如图2所示,其中包括2个体节结构,以铰链相连,有5个自由度。实验中,由于肩部是固定不动的,肱骨与肩部以3个自由度的球面铰链相连,只允许在3个平面内的转动(矢状面,冠状面和水平面)。肘部相当于以一个有2个自由度的万向接头连接,只允许前臂的转动和弯曲运动。其中两体节的质量、长度以及转动惯量如表1所示。表1中,l1为大臂长,d1为大臂质心到肩关节的长度,M1为大臂质量,I1xx、I1yy和I1zz为其转动惯量;小臂与手组成的整体称为前臂,l2小臂长度,d1为前臂质心到肘关节的长度,M2为前臂质量,I2xx、I2yy和I2zz为其转动惯量[6]。

图2. 上肢简化模型
人体是十分复杂的,其运动过程是许多肌肉、肌腱与骨骼等共同作用的结果,但对于人体上肢的动力学分析,不可能考虑每一块肌肉的作用,所以对主要肌肉的选取和评估也是至关重要的。首先将人体上肢简化成如图2所示的结构,肩部固定不动,肩关节相当于球形铰链结构,腕关节相当于转动副。模型1选取全部上肢肌肉,如图3a所示;模型2选取主要作用肌肉:三角肌、胸大肌、肱二头肌长头、肱二头肌短头、肱三头肌长头和肱三头肌外侧头共6块肌肉,如图3b所示简化模型[7-9]。

图3. 上肢仿真模型(注:3a.全肌肉模型;3b.简化模型)
2.运动方程
利用拉格朗日动力学方程对人体上肢进行数学建模,从而利用逆动力学原理计算主要肌肉的肌肉力大小,图2所示上肢模型的动力学方程可表示为公式(1):

其中:T为质点系动能;pk为系统第k个广义坐标;n为质点系中的质点个数;s为系统中完整约束的个数;Qk为广义力,其中不仅包含外界主动力,还包含系统中的有势力以及阻力等。当系统中只有保守力作用时,由于有势力做功与时间无关,故引入拉格朗日函数L=T-V,其中V为质点系的势能,则公式(1)可被简化为:

如图2所示,p1和p2表示上肢运动系统的两个广义坐标。设两个质心对应的坐标分别为(x1,y1),(x2,y2),则质心坐标用广义坐标表示为公式(3):

对公式(3)取时间导数,得到质心速度微分方程,见公式(4):

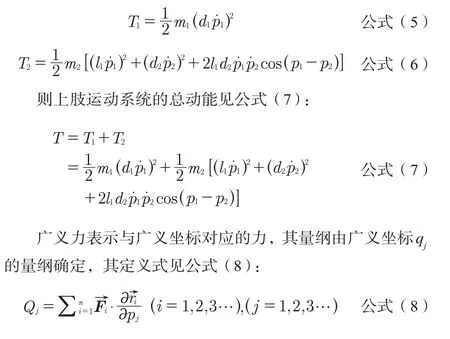
其中,i表示主动力的个数;f表示广义坐标的数量,即系统自由度数;表示第i个主动力;表示与第i个主动力对应的力矩;pj表示第j个广义坐标。Qjδpj的量纲是功,其中δpj为第i个广义力在j个广义坐标下产生的虚位移,因此Qj的量纲由pj的量纲决定,当pj是长度时,Qj为力;当pj是角度时,Qj为力偶。
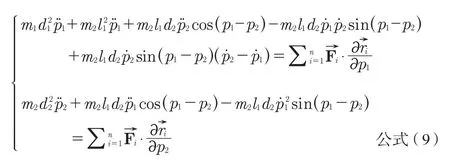
将以上推导结果代入公式式(1)并计算化简得到系统拉格朗日方程,见公式(9):
运动过程中,各部分角度、速度以及加速度大小均可由运动捕捉系统采集的位置信息并加以处理得到。因此,通过以上变换,就可以求得肌肉对两臂所做的功,结合人体生理特点以及解剖学知识,可以确定各肌肉力做的功,进而求得各肌肉束的肌肉力大小。
3.人体运动信息的采集
人体运动信息不仅包含直观的运动信息,还包括肌肉的活动信息。如图4所示,通过运动捕捉系统(OPTOTRAKCERTUS)和肌电采集系统(Bortec Biomedical ATM-8),对人体的运动信息进行采集,并以C3D格式保存,以便导入到建立的估计模型之中。实验对象所模拟的是手臂在水平面内的运动,如图5所示,从A点运动到B点。

图4. 运动信息采集
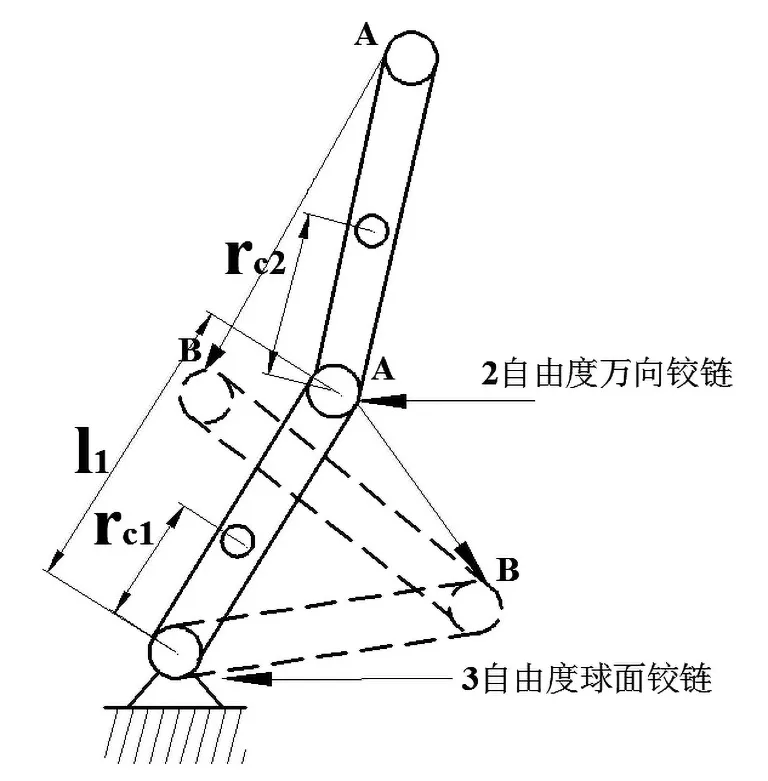
图5. 上肢运动示意图
4.结果与讨论
将采集的C3D文件导入到骨肌模型中,仿真人体运动,此运动过程持续5s,通过计算机进行分析计算,可以计算出人体上肢运动过程中各个肌肉的肌肉力大小,从而对人体上肢肌肉功能状况进行分析,研究者或医生可以很容易对某块肌肉或者某组肌肉的肌肉力进行分析,据此对患者进行诊断或者治疗。
三角肌受力情况如图6所示。由图可以看出:全肌肉模型中三角肌包含6块肌肉,其所提供的力远大于简化骨肌模型单肌肉的力输出,达几倍甚至几十倍。二者运动过程是一致的,但肌肉力大小和分布有很大差别,主要是因为:①运动过程中,主要作用肌肉不同,如:部分肌肉受损,即使患者可以完成相应运动,但其肌肉力大小及分布是不同的;②由于被动力的原因:一部分被动力是由于肌肉数量较多导致的,简化骨肌模型包含肌肉较少,产生的被动力较小,可以通过改善模型,消除其影响;还有一部分是由于主要作用肌肉不同导致的,这是导致被动力的主要原因,无法消除。
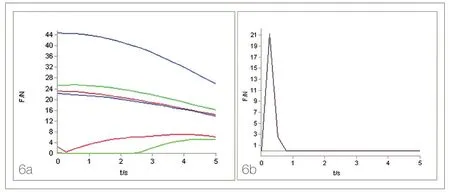
图6. 与锁骨相连的三角肌受力情况 (注:6a.全肌肉模型;6b.简化骨肌模型)
由此可见,在实际应用中,对于部分肌肉的刺激与正常人体运动是不同的,其肌肉力大小与分布情况均发生变化。在指导康复治疗过程中,需根据其分布情况,调整刺激的强度。
图7a、7b分别为将C3D文件导入到全肌肉模型和简化骨肌模型中,计算得到的人体上肢各肌肉的力分布情况,不同肌肉以不同颜色区分。
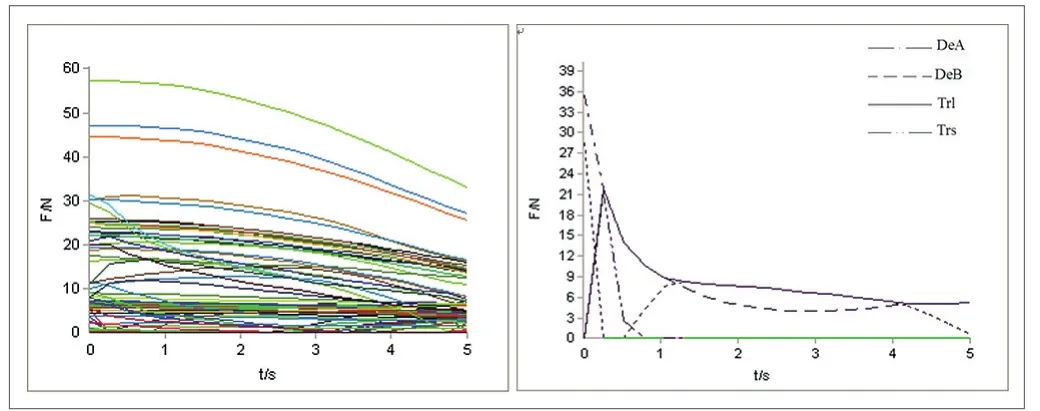
图7. 两模型肌肉受力情况 (7a.全肌肉模型;7b.简化骨肌模型)
从图7a、7b两图的对比情况可以看出(其中,DeA:与肩胛骨相连的三角肌;DeB:与锁骨相连的三角肌;Trl:肱三头肌长头;Trs:肱三头肌短头;其他几块肌肉的肌肉力值太小,在图中没有体现出来),全肌肉模型和简化骨肌模型的肌肉力分布有很大的不同。这不仅体现在动力源数量减少上,更主要的是其肌肉力大小和分布都发生了变化,由此可以看出对非全肌肉模型的分析的必要性,尤其是对功能电刺激等对部分肌肉刺激的治疗的指导作用。
对于简化估计模型的研究可为运动功能障碍患者的诊断和治疗提供指导。当前,功能电刺激是运动功能障碍的一种重要治疗方法,但不同患者的患病部位和患病程度不尽相同,而刺激的强度和部位却没有针对不同患者而设定不同方案。这主要是因为没有科学的依据可循,而对于简化骨肌模型的研究可以为此提供科学依据。如上文所述,与锁骨相连的三角肌在运动过程中,发挥主要作用,就对此施加较大刺激,而肌肉力很小的肌肉,就可以减小刺激,甚至不施加刺激。患者的健侧和患侧进行相同动作,并进行上述分析,通过对比甚至可以更精确地找出患病肌肉。这样不仅为医生的诊断和治疗提供依据,而且可以减轻患者的痛苦,缩短治疗周期。
综上所述,对于人体上肢的动力学分析,从而实现对其肌肉力的预测,并从全肌肉模型和简化模型两个方面对比分析,从而得到二者的相同与差异之处,对运动功能障碍患者的诊断和康复训练提供指导。而且,此项研究还可以为运动功能障碍患者的康复情况提供科学的依据,为某些医疗方法的有效性提供支持。研究还表明,对部分肌肉刺激与正常人体运动的肌肉力大小和分布不同,简化模型的分析结果对医疗诊断和指导具有重要意义。同时还可以看出,通过对不同肌肉模型的分析,可以为不同患者设计不同的治疗方案,为患者减轻痛苦,并提高治疗效率。但简化模型肌肉力变化较为剧烈,使得肌肉的负荷较大,对模型进行优化是下一步研究工作的重点。
猜你喜欢
小哥白尼(趣味科学)(2022年1期)2022-04-26
家庭医药(2022年1期)2022-01-18
大科技·百科新说(2021年10期)2021-12-31
中华养生保健(2021年18期)2021-02-13
文萃报·周五版(2021年51期)2021-01-04
爱你(2019年33期)2019-11-14
新传奇(2019年40期)2019-11-01
小猕猴学习画刊·下半月(2019年6期)2019-08-13
健康博览(2016年5期)2016-05-14
新高考·高一物理(2014年1期)2014-09-18
