
冲压式智能植树机创新设计*
2022-11-17 09:39武佳旭陶家鼎赵德金王德超
南方农机 2022年22期
武佳旭 , 陶家鼎 , 赵德金 , 王德超
(延边大学工学院,吉林 延边州 133002)
1 研究背景
我国西北地区受气候变化的影响,其荒漠化治理问题备受关注。荒漠化对我国的生态环境、社会经济发展和生产生活造成了威胁与危害,严重影响了人民的生存环境,极大地制约了我国地方经济、环境的可持续发展。
我国荒漠化土地总面积261.16万km2,占国土面积的27.2%。长期以来,我国荒漠化防治工作坚持依法防治、科学防治,坚持以植树造林、植被恢复为手段,不断健全法律法规,优化顶层设计,持续深化改革,加强监督考核,实施重点工程治理,强化荒漠植被保护。“十三五”期间,累计完成防沙治沙任务1 097.8万hm2,完成沙漠化治理面积160万hm2[1]。因此,为彻底解决我国土地荒漠化问题,提高森林覆盖率,改善生态环境,必须大力开展机械化和智能化的植树造林工作,课题组采用现代科学技术设计了一种小型智能植树机,极大地解放了劳动力,提高了植树造林效率。
2 总体设计
课题组参照传统人工苗木栽种流程进行智能植树机作业流程研究,根据传统的人工植树过程中两人协同完成流程进行分析:一人进行树穴挖掘,挖至规定深度,随后一人将树苗竖直放入坑内扶正、覆土,最后进行压土、浇水,同理,下一苗木种植流程同上。进行初步研究后得知传统的人工种植过程受工作强度、时间、地区环境等因素影响,人工种植过程中工作人员的体力消耗较大、种植效率较低,不能完全满足植树时节上的需要,并且由于栽种区域多为干旱闷热环境,需要随时携带浇灌用水,导致栽种作业效率低、劳动强度大,工作人员在长时间进行栽种作业后身体极易疲惫[2-3]。
为解决以上问题,可以采用机器人来代替人工进行种植。课题组基于现代智能技术设计了一种小型冲压式智能化苗木种植机器人,适用于杆状苗木植物的种植,如胡杨苗、杨柳等。可以实现多种类苗木与复杂环境一体化、智能化的苗木栽种,并且满足植树精准、连续性好、存活率高等种植要求。
课题组设计的智能植树机主要由智能电控系统、底盘驱动系统(电动履带)、多功能一体化种植筒、苗木存储分选转盘装置、储水浇水系统、太阳能供给储能部分组成,具有自动完成树穴定位、分苗、种植、压土、浇水等功能[4-10]。
2.1 机械结构设计
2.1.1 一体化苗木存储分选部分
苗木存储分选装置以中心平行导轨连接方式固定于植树机机架1上方。存储分选圆盘分为两层,苗木下挡盘6固定不动与移动框架3相连接,边缘处预留42步进电机7安装孔;下方装有12 V小型电动推杆10用于推动苗木转盘移动。苗木在转盘带动下来到指定投放口11的位置,受重力作用掉入下方的植树筒中;上面一层设计为外齿轮转盘9,与步进电机输出轴上小齿轮8啮合可实现360°转动,通过不同角度指令,电机转动实现树苗的不间断运送。当一个圆盘的树苗全部种植完成后,由电动推杆控制苗木转盘切换,使下一个圆盘到达第一个圆盘的位置,便可重复与上一苗木转盘同样的分选过程。苗木存储分选转盘各部分组成,如图1所示。
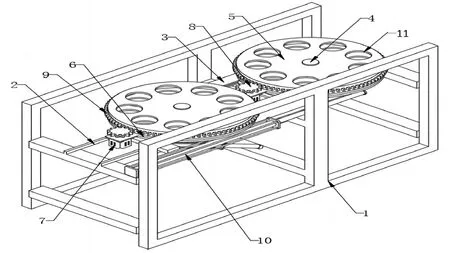
图1 苗木存储分选转盘
2.1.2 多功能一体冲压植树筒
多功能一体冲压植树筒,主要结构由两个电动推杆、支撑架、重型滑轨、树苗输送筒、圆锥形筒盖组成。树苗通过苗木投放孔后受重力影响落到冲压式植树筒中,植树筒在电机推杆推动重型滑轨的作用下一同向下移动,圆锥形筒盖插入土中,电动推杆收缩,通过连杆机构将圆锥形筒盖打开;然后,树苗输送筒身后的电动推杆收缩,输送筒上升,树苗栽土中。在植树筒尾部装有压苗装置,待植树筒将树苗插入土中后,由信号控制器发出指令驱动压苗装置随电动推杆下移,将树苗周围松土压实,随后电动推杆上移进行下一操作。多功能一体植树筒整体构成,如图2所示。
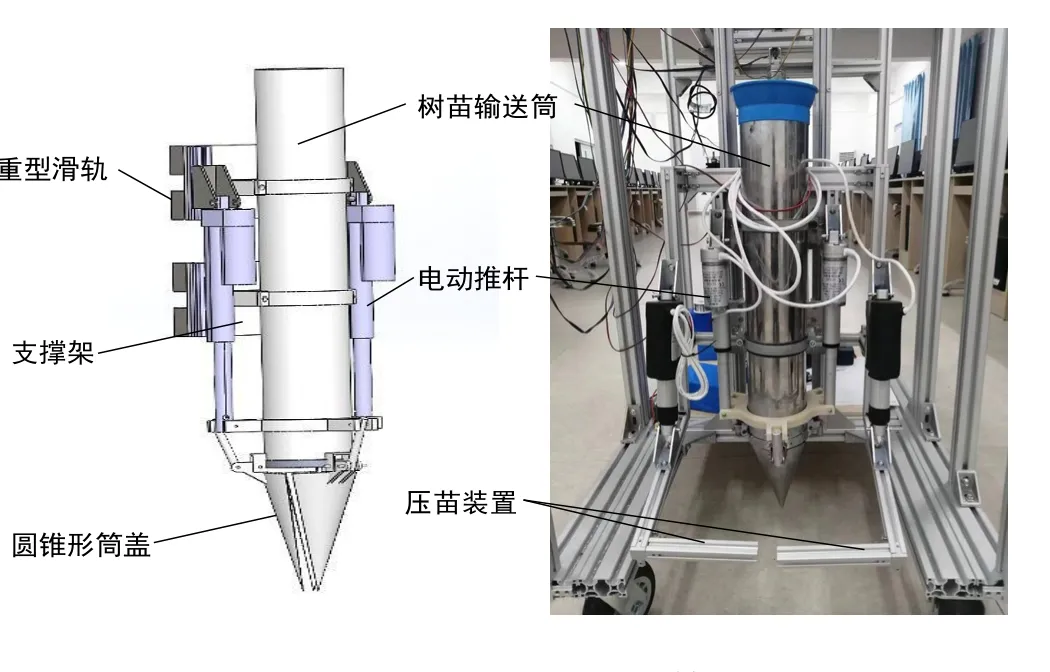
图2 多功能一体植树筒
2.2 驱动系统设计
驱动系统的驱动后轮由两个24 V,8寸的直流无刷轮毂电机驱动,由树莓派平台控制鼓轮电机控制器(AMQD6020BLS-E2F)实现植树机的前进、后退和转弯。当两轮同时以相同速度、向相同方向转动时,植树机前行;当两轮同时反向旋转时,植树机后退;当两轮停止旋转时,植树机停止。通过传感器控制两轮的旋转方向、转动速度可实现植树机的左右转向,例如左轮后旋右轮前旋即为左转;右轮后旋左轮前旋即为右转。可以在前方设置两个万向轮,使得植树机的转向可以仅通过后轮的旋转控制实现。
2.3 智能控制系统组成设计
2.3.1 集成式树莓派继电器选型
智能控制系统主要以树莓派为控制核心,并采用微雪集成式8路继电器为控制单元,实现了各部件电动推杆、浇水电磁阀的开关等控制,极大地缩小了控制单元布局,并能更好地使其控制单元通信保持最佳状态。树莓派与继电器集成效果,如图3所示。

图3 树莓派与8路继电器集成效果
2.3.2 步进电机DBD控制器选型
步进电机控制器采用DBD-Ant集成式控制模块,该模块可以控制不同型号的步进电机,并且其尺寸仅为50 mm*30 mm*9 mm,采用ARMCortex-M3内核的32位处理器,主频72 MHz,配备TOSHIBA的双全桥驱动IC,运行空间矢量控制算法及动态力矩调节算法,可以控制42、57型步进电机,支持Windows、Linux、Android、Mac系统,支持PC、树莓派、Ardunio等(需USB或CAN接口),接口协议开放,并具备级联功能。接线方法如图4所示。
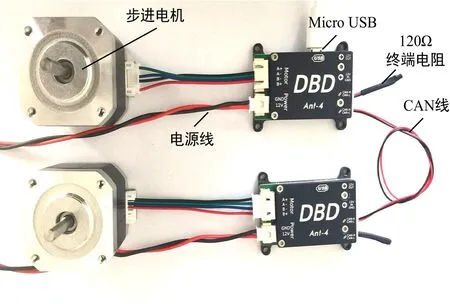
图4 DBD控制器级连接线方法
2.3.3 直流电动推杆控制设计
采用L298N直流电动机驱动模块,输入端可与树莓派引脚直接相连,控制直流电机完成作业指令,并可以实现电机的正转和反转。通过ENDA和ENDB输入PWM信号,还可以实现电机的加减速。
2.3.4 减速步进电机选择
本设计采用2相4线42型大扭矩减速步进电机,主要用于苗木转盘运动,实现正时针、逆时针转动,完成苗木分选工作。
3 工作方式
首先在程序里预定各部分的工作时间,植树机根据后台控制端到达初始点开始工作,与此同时苗木分选机构工作,将树苗投入,随后冲头向下冲压,将树苗插入土中,植树筒前段分开,苗木受周围土壤覆盖定位,推杆回收将植树筒收回至指定位置。压实机构接受指令进行换向工作,推杆再次伸出,推动压实装置工作,压实完成后推杆收回至初始位置,浇水系统电磁阀工作,完成浇水后,植树机继续向前行进固定株距,再次重复上述作业。如此往复进行工作。植树机作业运行流程,如图5所示。

图5 植树作业流程
4 设计创新点
1)相较于目前市面上的植树机,本植树机可以实现自动放苗、栽种、压实、浇水、行走等完整的植树作业流程,可以大幅度减少人力成本。
2)本植树机可以实现自动控制、手动控制和远程控制,实现了植树机在工作过程中的多模式应用。
3)仅通过控制两个轮的旋转方向和速度就可以完成植树机的苗木分拣与存储过程,使得驱动系统大大简化。运苗部分采用推杆与齿轮相结合的方式,通过控制推杆及齿轮转动角度可以高效地完成分苗放苗活动。
4)以树莓派为载体,可为以后物联、互联技术的实现留有充足的扩展空间,为现代农业、种植业提供了技术参考与经济价值。
猜你喜欢
宝钢技术(2022年4期)2022-12-23
闽江学院学报(2021年5期)2021-11-19
小学生学习指导(低年级)(2021年3期)2021-07-21
小天使·一年级语数英综合(2021年3期)2021-05-08
兵器装备工程学报(2020年12期)2021-01-12
电子制作(2019年11期)2019-07-04
小学生学习指导(低年级)(2019年3期)2019-04-22
农产品市场周刊(2016年43期)2016-12-23
科技创新导报(2016年4期)2016-11-19
电脑爱好者(2016年6期)2016-04-01
