
基于耦合式仿生海豚深松铲的作业机理分析*
2022-11-17 09:39赵永来王利鹤牛文学高子博冯瑞龙
南方农机 2022年22期
赵永来 , 王利鹤 , 牛文学 , 高子博 , 李 盼 , 高 伟 , 樊 琦 , 冯瑞龙
(1.内蒙古农业大学职业技术学院,内蒙古 包头 014109;2.吉林大学,吉林 长春 130015)
0 引言
耕地是最宝贵的农业资源和最重要的生产要素。中央高度重视耕地质量保护工作,习近平总书记曾明确提出“耕地是我国最为宝贵的资源”。耕地红线不仅是数量上的,也是质量上的。“十四五”规划纲要提出要坚持最严格的耕地保护制度,深入实施藏粮于地、藏粮于技战略,加大农业水利设施建设力度,实施高标准农田建设工程,强化农业科技和装备支撑[1]。其中,农业机械作为提升农业装备支撑的重要技术之一,对改善传统农业种植模式、耕作模式及加快农业现代化起着重要作用[2]。近年来,深松技术作为保护性耕作的重要技术之一,已经被广泛应用于农业机械耕作中。深松作业的主要目的是打破犁底层(又称作“亚表土层”),确保农作物根系健康生长,是改善土壤土质的重要因素。犁底层是位于耕作层底部较为坚硬的土层,是耕作时土壤长期受到犁的挤压、车轮碾压以及降水时黏粒随水沉积所致。犁底层一般距离地表15 cm~20 cm,厚度为8 cm~10 cm,最厚可达到20 cm,其结构多半为片状、层状或大块状,主要表现为容重较大、总孔隙度较小[3-4],会阻碍植物根系正常新陈代谢,破坏土壤中有益微生物生存、繁衍的环境[5-6]。
深松铲作为深松机中接触土壤的关键机械部件,能够起到切削土壤、打破犁底层的作用,深松铲性能的好坏会直接影响深松作业的效果。深松铲主要由铲尖和铲柄构成,铲尖在作业过程中起到破土、入土的作用;铲柄在作业过程中起到破土、碎土的作用。大量的科学研究表明:不同的铲尖和铲柄构成的深松铲的几何结构形状、尺寸与材料属性不同,对深松作业效果会产生不同的影响[7];不同的深松铲结构对耕作阻力会产生不同的影响;不同的铲尖入土角度和结构对深松铲入土性能和松土范围会产生不同的影响[8]。有研究表明向岩体土层注入高压气体可以增强岩土体的渗透性,以此提高清除污染物的效率,达到理想的效果[9]。韩文君等[10]对高压气体增强土体渗透性方面进行了系统且深入的研究,并成功利用高压气体与真空法相结合在增强土体渗透性的基础上对软土地基进行了加固。气压式深松作业方式拓展了传统深松方式,气压式深松过程可视为土体变形、气压衰减、气体渗漏三个过程的耦合,该方式有利于增强土体渗透性[11-12]。近些年随着仿生学的蓬勃发展,一些学者也开始利用仿生学原理进行深松铲的结构减阻设计研究,耦合仿生深松铲[13-14]。鲨鱼可以在海中快速游动,根据其这一特点,张金波[15]将鲨鱼鳞片的波纹结构应用于深松铲,降低了土壤的黏附力和阻力,减小了拖拉机的牵引力。与鲨鱼相同,海豚也可以在海中快速游动,跃出水面,完成冲浪、翻滚、自由转体等复杂的动作。海豚的鳍光滑,不具有波纹结构[16]。生理学家James Gray以海豚为研究对象,在1936年提出了著名的减阻“悖论”[17],使海豚的皮肤与结构减阻成为当年研究热点之一[18-21]。相关报道中提到,美国学者Shawn R.Nolen研究发现,海豚流线型的身体外形才是其可以在水下快速游动,跃出水面的根本原因[22]。有相关学者的研究表明,海豚跳跃时的身体形状与流体机械的结构极为相似,这为设计仿生减阻机械构件提供了新的思路[23-25]。
本文基于丹麦禾沃(HE-VA)公司研制的深松机[26],对海豚深松铲施加气压式深松技术。从复杂多功能耦合的角度出发,结合深松机触土部件仿生减阻方法,阐明高压气体对土壤劈裂性能与海豚深松铲的减阻关系,讨论各因素的相互影响并优化合成参数,分析高压气体与仿生相互耦合机理,为耦合式仿生深松铲的研制及推广提供了科学依据。
1 耦合式仿生海豚深松铲的模型建立与气压机理分析
1.1 基于海豚胸鳍、背鳍几何结构特征的仿生深松铲模型建立
深松铲铲尖是深松铲的核心部件之一,具有切开和破碎底层坚硬土壤的作用。铲柄是在铲尖入土后直接接触土壤的第二部件,而且深松作业时的阻力大部分来自铲柄破开坚硬犁底层时土壤的摩擦力和黏附力,另一部分则是来自铲刃切削底层土壤时的阻力。本文选取海豚胸鳍外轮廓特征曲线并分析其分布规律,如图1(a)所示。发现其具有抛物线的数学特征,因此采用二次函数进行数据拟合,用于铲尖面的曲线设定。这类函数曲线可以用公式(1)的二次函数方程表达:

通过图像识别技术,提取海豚背鳍外轮廓特征曲线并分析其分布规律,发现其具有对数函数的数学特征,如图1(b)所示。因此采用对数函数进行数据拟合,用于铲柄触图面的准线走向设定。这类函数曲线可以用公式(2)的标准对数函数方程表达:

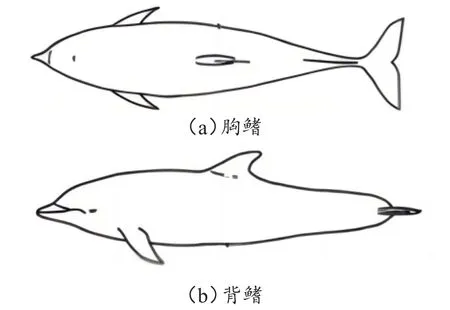
图1 海豚流线型外形
1.2 气压深松理论
气压深松是利用土壤的空隙性质,让气体射流能渗透其内部,使原本比较密集的土壤变得疏松。其本质是一个高压气流喷射冲击颗粒物料的过程,属于紊动冲击射流。其破坏作用可以看作是圆形紊动射流对固体壁面的冲击作用。由于气固的共同作用,这种射流不同于一般的自由紊动射流,被称为冲击射流。冲击射流对固体壁面的角度不同,其作用也各不相同。以最简单的射流垂直冲击情况展开讨论,冲击射流包括三个流动区域,如图2所示:分别是自由射流区(Ⅰ)、冲击区(Ⅱ)与壁面射流区(Ⅲ)。
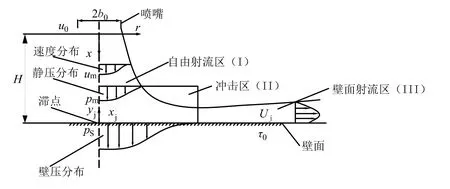
图2 冲击射流结构图
对于圆形冲击射流,其速度比尺um和速度半值宽bu可表示为公式(3):

其中,M0为喷射出口动量通量,即M0=2ρb0u20。
冲击射流无量纲速度的变化规律可表示为公式(4):
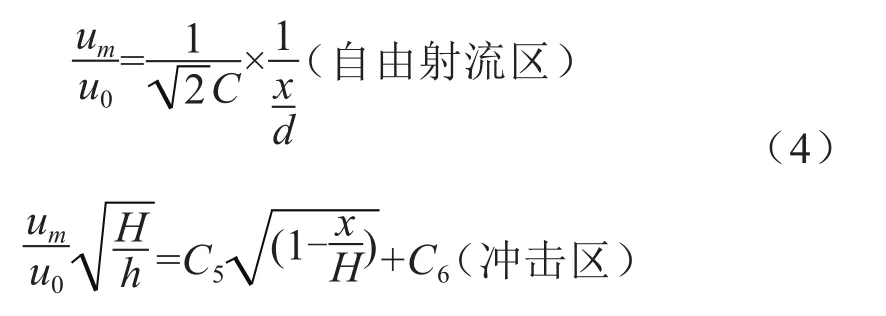
在射流冲击区,轴线压力pm随x的增长而增加,呈线性增长规律,可表示为公式(5):


其中,α与β由实验确定。而根据先前学者的试验结果,有将该结果带入上式,可得壁面切应力τ0的计算式(7):

射流冲击区的确定与计算结果为喷射装置设计、后期气压与土壤作用模型的建立提供了良好的理论基础。
2 土壤模型建立
2.1 泥土颗粒模型
Hertz-Mindlin with JKR 模型是一个凝聚力接触模型,主要考虑颗粒之间范德华力的影响和黏性接触模型。而田间泥土具有一定的黏性和湿润性,湿润的泥土颗粒间会受到范德华力的影响,因此使用JKR模型对泥土颗粒进行建模。
应用数学模型,基于Hertz-Mindlin接触模型的颗粒法向接触力,可表示为公式(8):
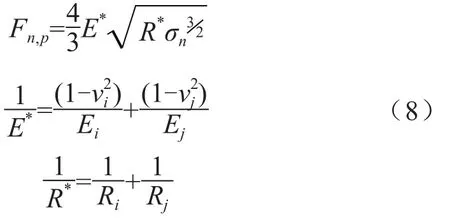
其中,Fn,p为颗粒受到的法向接触力;E*为等效杨氏模量;σn为法向重叠量;vi,vj为碰撞接触颗粒i,j的泊松比;Ei,Ej为碰撞接触颗粒i,j的杨氏模量;R*为等效半径,Rj,Ri为碰撞接触颗粒i,j的半径。颗粒间的法向阻尼计算公式可表示为式(9):
其中,为颗粒受到法向阻尼;Kn为法向刚度;为法向相对速度;m*为等效质量;mi,mj为碰撞接触颗粒i,j的质量;e为碰撞恢复系数。
颗粒间的切向接触力计算公式可表示为公式(10):
其中,Fl,p为颗粒受到切向接触力;δt为切向重叠量;G为等效剪切模量。
颗粒间的切向阻尼计算公式可表示为公式(11):

其中,Fdl,p为颗粒受到的切向阻尼;Kl为切向刚度;为切向相对速度。
2.2 曳力模型
本文采用Di Felice修正的流体阻力[27],其Di Felice阻力模型建立在自由流模型上,添加了孔隙率修正项来消除由孔隙率造成的相邻物料颗粒阻力的影响,可表示为公式(12):

其中,χ=3.7-0.65exp[-(1.5-loɡRe)2/2]。式中,CD为流体阻力系数;Re为颗粒雷诺数;dp为颗粒的直径;ρf为流体密度;αf为流体体积分数;uf为流体速度。
目前EDEM-CFD耦合模拟分析已被大量应用于气固耦合及液固耦合的流场分析,成为了研究颗粒运动及流场分布的有效方法。本设计采用EDEM-CFD进行耦合数值,通过UDF函数驱动,模拟气吹深松铲耕地过程,进一步分析气压耦合深松作用机理。
3 耦合式仿生海豚深松铲深积比阻的确定
将海豚流线型鳍结构特征曲线运用于深松铲的优化设计中,辅以加注气压,在满足耕作要求的情况下,尽可能降低深积比阻。本设计将深积比阻作为优化评价指标,深积比阻的定义为:单位深松深度、单位扰动面积下的牵引阻力。深松铲在工作时会对土壤产生扰动,扰动土壤在垂直于深松铲工作平面的投影即为土壤扰动面积。深松土壤扰动体积(深松深度与扰动面积的乘积)等效为立体圆锥体,由此确定目标函数f(X)可表示为公式(13):

其中,X(x1,x2,x3···,xn)为深松铲参数集。
图3为气压耦合海豚仿生深松铲土壤扰动体积的示意图,气压耦合海豚深松铲的深积比阻可通过公式(14)计算:
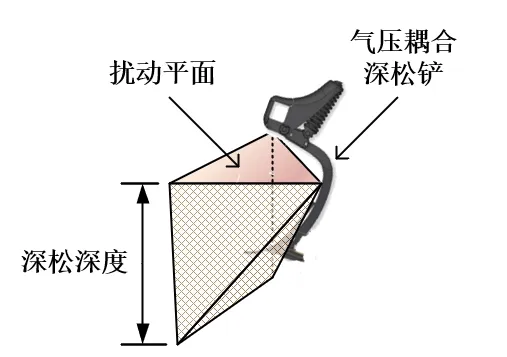
图3 气压耦合海豚仿生深松铲土壤扰动体积示意图

其中,F为牵引阻力;Hf为深松深度;Af为土壤扰动面积。
为降低气压耦合海豚深松铲牵引阻力并提高其深松效率,应该创建优化目标函数,设计深积比阻最优解,利用遗传算法进行拓扑优化,得到气压耦合海豚深松铲关键部件结构的最优减阻参数。
4 结论
1)本文分析了海豚胸鳍与豚背鳍外轮廓特征曲线,应用高压气流土壤劈裂理论,借鉴仿生学原理,建立耦合数学模型;确定射流冲击区,并建立射流区对气压与土壤作用的模型。
2)应用数学模型,基于Hertz-Mindlin接触模型的颗粒法向接触力,对泥土颗粒进行建模;设计并定义了深积比阻,将其作为评价指标,利用遗传算法进行拓扑优化,以期得到气压耦合海豚深松铲关键部件结构最优减阻参数。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
煤气与热力(2022年4期)2022-05-23
兵器装备工程学报(2021年10期)2021-11-08
电脑报(2021年25期)2021-08-27
汽车观察(2021年11期)2021-04-24
学生天地(2019年30期)2019-08-25
北京理工大学学报(2019年1期)2019-02-22
北京航空航天大学学报(2017年6期)2017-11-23
北京航空航天大学学报(2017年11期)2017-04-23
幼儿时代·故事妈妈(2004年3期)2004-03-17
