可复用运载火箭着陆装置展开与着陆分析
2022-11-15 00:17贾山赵建华陈金宝王永滨
航天返回与遥感 2022年5期
贾山 赵建华 陈金宝 王永滨
可复用运载火箭着陆装置展开与着陆分析
贾山1,2,3赵建华1,2,3陈金宝1,2,3王永滨1,3,4
(1南京航空航天大学航天学院,南京 211106)(2深空星表探测机构技术工信部重点实验室,南京 211106)(3航天进入减速与着陆技术实验室,南京 211106)(4 北京空间机电研究所,北京 100094)
针对可复用运载火箭垂直回收的技术需求,文章提出了一种新型着陆缓冲装置,介绍了其内部构型及工作原理,并通过运动学和着陆动力学分析验证了其实用性。建立了单套缓冲装置展开过程的运动学方程,通过对比在Adams仿真软件中得到的数据,验证了展开过程运动学方程的准确性。该装置通过铝蜂窝吸收火箭着陆时的冲击能量,为了提高缓冲性能,在着陆质量已知的情况下,基于运载火箭的三种代表性着陆工况,拟合出了着陆过程响应面代理模型,采用多学科协同优化方法,得到了理想的蜂窝压溃力值。最后,基于上述结果进行了多工况的着陆落震仿真。结果表明:该装置可有效降低冲击载荷并支撑箭体,可为后续相关领域的设计研发提供参考。
可复用运载火箭 铝蜂窝 多目标协同优化 稳定性 着陆缓冲装置
0 引言
当前,人类对宇宙的不断探索不仅拓展了自身的认知和活动边界,也促进了空间技术对生活方式的深刻改变。开展更加密集的深空探测任务,开发潜力无限的空间应用市场,已经成为世界各航天大国新的竞争着眼点,这其中,如何有效降低运载火箭的发射成本,进一步提升单次发射任务的经济和技术效益,是亟待解决的关键问题[1]。在单次发射任务中,运载火箭一级的成本通常约占总成本的60%,而实现运载火箭的可重复使用能够有效降低其发射成本[2],在该领域,美国SpaceX公司的取得了令人瞩目的成就[3-4]。为实现运载火箭的陆地或海上垂直回收,在箭体下侧安装着陆缓冲装置,触地后完成着陆缓冲并支撑箭体。鉴于运载火箭的结构重心较高且着陆工况的不确定性,设计一款稳定可靠的着陆缓冲装置并分析其缓冲能力就显得尤为重要。
文献[5]提出了一种整体构型和“猎鹰9号”着陆腿近似的着陆缓冲装置,在伸缩杆靠近箭体的位置采用铝蜂窝缓冲,伸缩杆靠近足垫处采用油气式缓冲,对着陆性能参数进行了多工况的多目标协同优化,此方法虽可在一定程度上提高运载火箭的着陆缓冲性能,但其装置内部结构复杂,可靠性降低。文献[6]提出了一种安装在箭体下侧靠近发动机位置的缓冲装置,采用了一种新型的油液-蜂窝二级串联缓冲器,建立了其软着陆过程动力学模型,以多种着陆工况为基础对缓冲装置相关参数进行了协调分析,虽然在一定程度上提高了着陆性能,但展开后的实际支撑面积小,着陆稳定性较差。文献[7]设计的着陆缓冲机构与蓝色起源公司的新谢泊德火箭着陆缓冲机构近似,以着陆机构受力最小为目标函数对机构尺寸参数进行优化,并通过大量仿真分析得到了着陆机构可以稳定着陆时的参数边界。文献[8]根据着陆支撑要求及约束条件设计了一种折展锁紧机构,进行了碰撞过程的强度校核,通过仿真搜索获得了稳定可靠展开控制参数。由于运载火箭与探月着陆器在着陆缓冲性能等方面具有相似之处,因此可在一定程度上参考着陆器相关研究。文献[9-10]以铝蜂窝为缓冲吸能材料,对不同规格的铝蜂窝进行了仿真及实物试验研究,获得了缓冲性能方面的结论。文献[11]建立了探测器软着陆动力学分析模型,并分析了不同阻尼刚度的着陆器本体对有效载荷冲击的影响,研究结果对探测器的动力学分析与设计提供了一定的理论依据和技术支持。文献[12]分析了着陆器机体对着陆性能的影响,并通过在LS-DYNA中模拟仿真得到了二级铝蜂窝对着陆加速度的影响。上述研究成果:在机构构型方面或是内部设计复杂、可靠性降低,或是展开后的支撑面积较小、着陆稳定性较差;在仿真分析方面,一般只考虑各项设计指标对冲击加速度的影响,鲜有以着陆时的多工况为设计初始条件对着陆装置的缓冲性能进行协调设计分析。鉴于此,本文基于外翻式着陆装置构型,提出了一种以铝蜂窝压溃吸能为缓冲方式的收拢展开机构,介绍了其内部结构及工作原理,建立了其展开过程运动学模型及着陆动力学模型,在确定了着陆性能判断指标的前提下,考虑多工况着陆条件,采用多学科协同优化方法获得了较为理想的蜂窝压溃力值,并仿真分析其着陆性能。该装置工作原理简单,可靠性高,在发射状态中阻力小,着陆时能有效吸收冲击能量,着陆后可稳定支撑箭体。
1 可复用运载火箭着陆缓冲装置构型设计与建模分析
1.1 整器构型设计
图1为本文所设计的可复用运载火箭着陆缓冲装置,采用了着陆腿外翻式的基本构型。

图1 着陆缓冲装置展开状态
如图2所示,当处于发射上升阶段时,其整流罩下边缘外形轮廓与辅助外壳基本啮合,以减少气动阻力,整流罩内部固定的第一电动推杆的伸缩杆插入到辅助外壳的限位孔中,使辅助外壳处于锁定收拢状态。
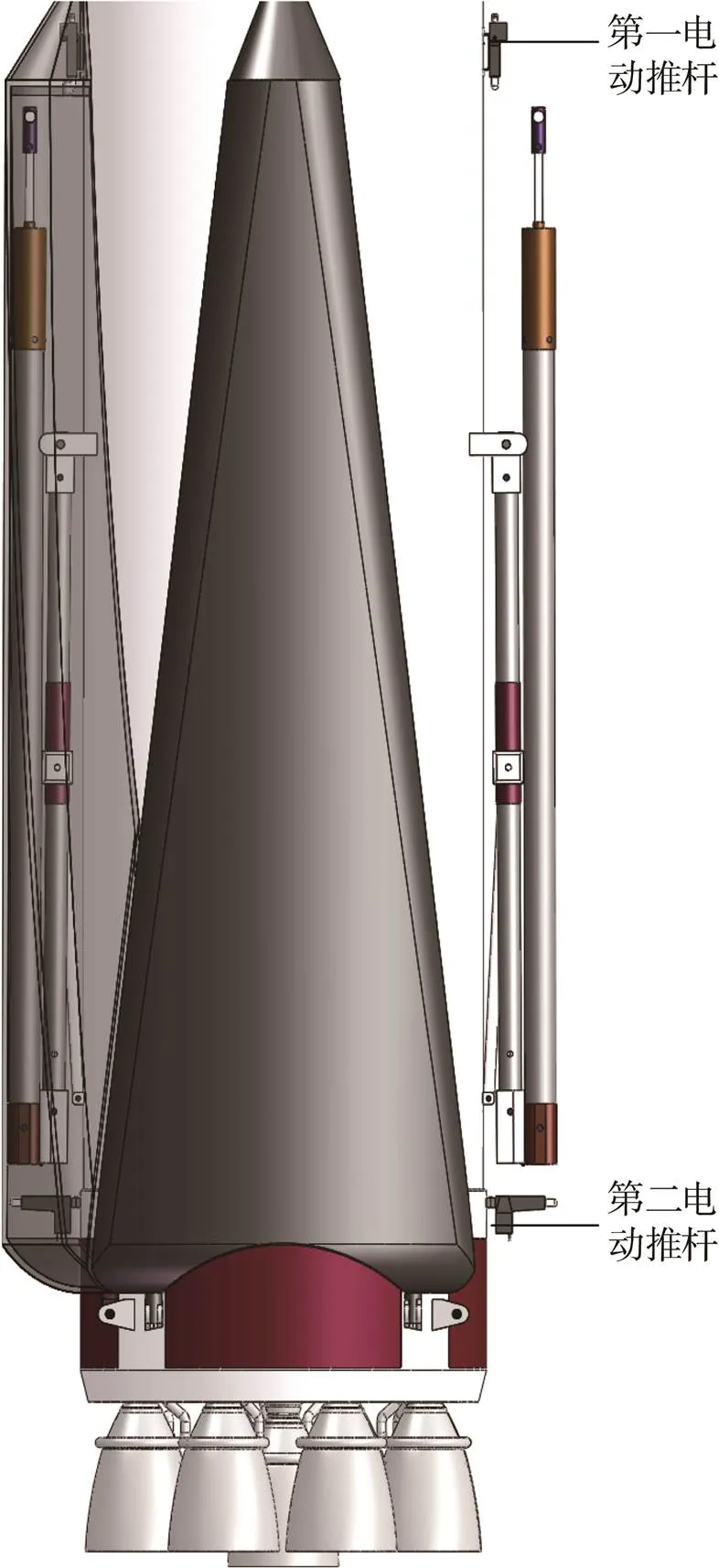
图2 着陆缓冲装置收拢状态
如图3所示,为保证着陆腿能稳定展开到位,收拢展开机构上安装有驱动装置,当处于降落着陆阶段时,辅助外壳被解锁释放,第二电动推杆将推动辅助外壳的内壁使其展开一定的角度,之后辅助外壳在重力和钢丝绳拉力的双重作用下展开,当展开到限定位置后,弹簧销中的销键插入到上支杆的限位孔中,滑套和上支架相对固定,整个收拢展开机构相对锁定;铝蜂窝缓冲器位于折展机构的下端靠近足垫的位置,在着陆缓冲段可通过内部铝蜂 窝的压溃变形吸收冲击能量,确保运载火箭安全着陆。

图3 展开驱动装置
此方案在收拢状态下气动阻力较小,展开后的支撑面积大,稳定性好,采用铝蜂窝缓冲吸能结构,无需复杂的电控系统,有助于提高可靠性。
1.2 展开过程运动学模型
为研究此装置展开过程各杆件的运动状态,参照“猎鹰9号”在2015年12月22日首次成功实施的一级陆上软着陆,根据直播画面,着陆腿在即将展开时箭体的初始速度约为30m/s,着陆后状态如图4所示。

图4 “猎鹰9号”陆上软着陆
图5为着陆缓冲装置中各杆件展开过程状态的运动学模型,其中,段为上端碳纤维支杆,段为下端碳纤维支杆,为主着陆腿,为支撑杆,点为设于滑套上的铰链,点、、为位于箭体上的铰链,由图5中的几何关系可推得




综上各式,以电机驱动的钢丝绳长度为自变量时,可得各主要杆件的运动学方程为


图5 展开过程运动学模型
为验证上述推导的运动学模型的正确性,将三维模型导入到动力学仿真软件Adams中,如图6所示,设置相应的运动副约束和杆件质量,着陆腿的初始展开角度为5°。假设火箭的初始速度为30m/s,由于空气流体与火箭机体之间的相对速度较大,故应在着陆缓冲装置展开仿真过程中考虑空气阻力对着陆腿展开的影响,其计算公式为[13]
表1 着陆腿展开主要参数
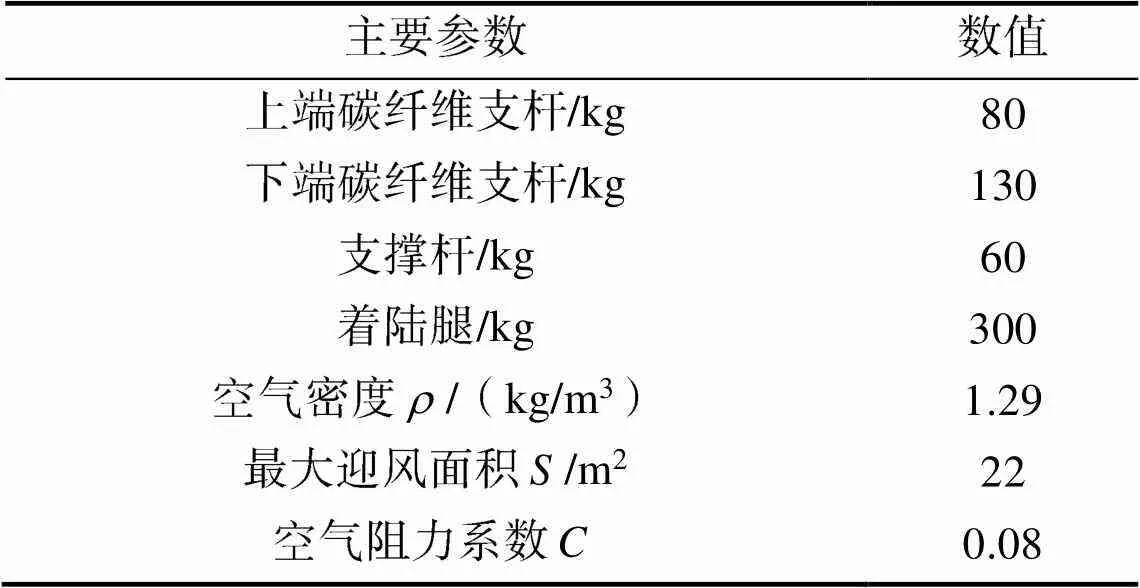
Tab.1 Main parameters of landing leg deployment
为在动力学仿真软件Adams中模拟着陆腿的展开过程,这里将火箭本体固定,重力加速度为10m/s2,由式(9)建立子函数施加于着陆腿上,仿真时长5s,步数为1 000,通过仿真分析得到了钢丝绳长度随时间的变化曲线,如图7所示,由图7可知,在着陆腿展开的初始阶段,钢丝绳的长度变化不明显,一直持续到2s,在2~2.4s时,长度会陡然变短,其原因与折展机构的几何构型有关,之后变为恒定,表示折展机构展开后已固定。
着陆缓冲装置在展开时会受到本体速度及姿态、风速、空气密度等多种条件的影响,电机驱动部分可在一些特殊工况下辅助着陆缓冲装置展开,通过仿真得到的钢丝绳长度随时间变化曲线,为电机的工作状态提供了参考。
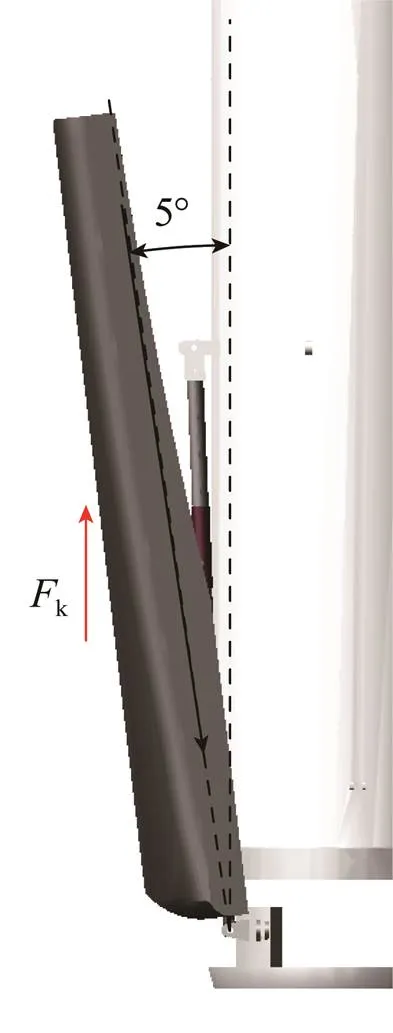
图6 着陆腿初始展开状态
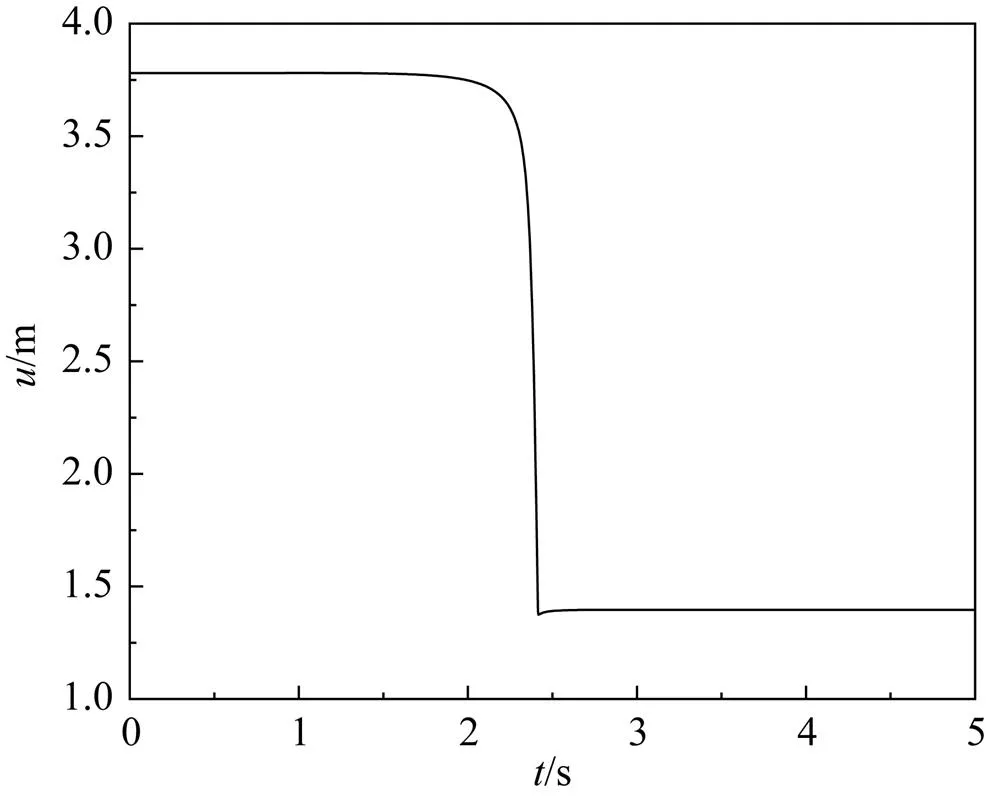
图7 钢丝绳长度变化曲线
将图7得到的钢丝绳长度随时间的变化数值导入到式(3)中作为自变量,并联立上述的式(1)至式(8),在三维模型中测量上述公式中相应各铰链节点间的距离赋值到对应的代数式中,运行计算得到了1、2、3、4随的变化情况,为验证其理论模型的准确性,获取了着陆腿在Adams仿真展开过程中1、2、3、4的变化情况,两组数据的对比结果,如图8所示。由图8可知:在着陆腿展开的过程中,钢丝绳的长度由3.78m变为1.40m,滑套在2.0~2.4s沿上支杆的快速滑移阶段,主要的承力杆件展开平稳;各杆件的运动学模型计算结果曲线与仿真结果曲线基本一致,验证了运动学模型的正确性,其存在少量偏差源于输入后公式迭代过程中的误差累积所致。

图8 运动学模型与仿真模型结果对比
2 着陆工况及着陆性能判断指标
探月着陆器在着陆时通常会受到姿态角、偏航角、垂直速度和水平速度等的影响,而对于运载火箭的着陆问题,考虑其箭体高、着陆腿展开面积大、着陆地面平坦等因素,并且可参考的数据有限[2],只能在一定程度上通过预估其箭体参数(高度、质量分布、直径等)后,得到安全着陆时主要着陆参数的取值范围,如表2所示。
Fig.2 Range of parameters related to landing conditons

表2 着陆工况相关的参数取值范围
根据着陆缓冲装置的结构强度要求及任务需求,参照着陆器的着陆性能指标[5],提出了运载火箭的着陆性能判断指标如下:
1)为保证着陆缓冲时着陆过载不会对箭上设备造成损伤,箭体质心相对地面的最大冲击加速度max应不超过6n,且应尽可能小。
2)在较危险着陆工况下运载火箭应不会翻倒,即着陆过程中,以2-2着陆模式为例(即先有两条相邻着陆腿着陆,然后另两条着陆腿着陆),相邻两着陆腿足垫的中点距地面的最大距离max不超过1.8m,否则视为运载火箭会翻倒,max应越小越好。
3)为防止着陆后火箭发动机喷管撞击地面,箭体底部距地面的最小距离min应不小于2m,且越大越好。
4)在特殊的极端工况下铝蜂窝缓冲器的最大缓冲行程max不应超过其设计行程0.5m。
3 铝蜂窝缓冲力寻优
通过铝蜂窝缓冲器内铝蜂窝的压溃变形可吸收运载火箭着陆时的冲击能量,若缓冲力太小,则压溃行程可能超过铝蜂窝缓冲的设计行程,导致着陆腿结构变形,若缓冲力太大,则可能起不到缓冲效果,过大的冲击加速度将损毁箭上仪器设备,因此,确定合适的铝蜂窝缓冲力显得尤为必要。
3.1 着陆工况的选取
基于表2所确定的着陆工况初始条件取值范围,挑选最具有代表性的几种着陆工况进行动力学仿真,根据上述的运载火箭的着陆性能判断指标,对各工况的着陆响应进行对比分析,确定了如表3所示的三种着陆工况:在正常着陆下箭体质心产生最大冲击加速度max的着陆工况1;运载火箭出现最小离地距离min、铝蜂窝可能会达到最大缓冲行程max的着陆工况2;着陆时会出现足垫最大离地距离max,箭体最有可能发生倾倒的着陆工况3。
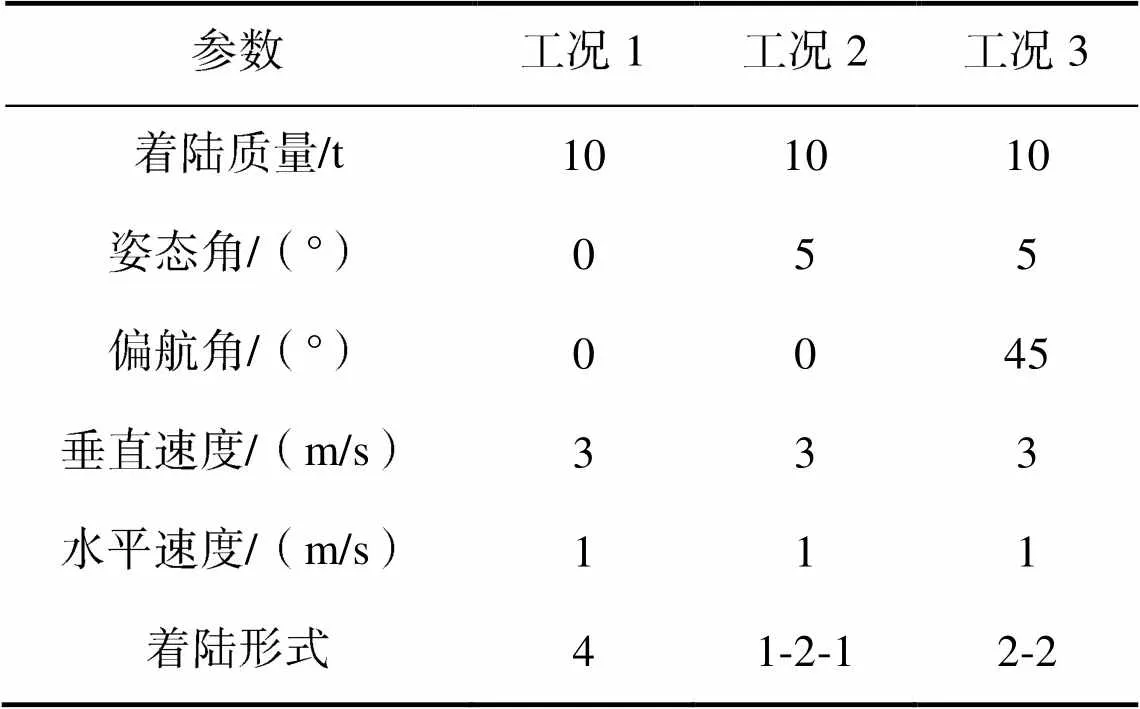
表3 着陆工况系数
(注:上表中的数字“4”表示着陆时运载火箭的四条着陆腿同时触地缓冲;“1-2-1”表示先有一条着陆腿着陆,然后两条着陆腿着陆,最后有一条着陆腿着陆缓冲;“2-2”表示先有两条相邻着陆腿着陆,然后另两条着陆腿着陆缓冲。)
3.2 寻优策略
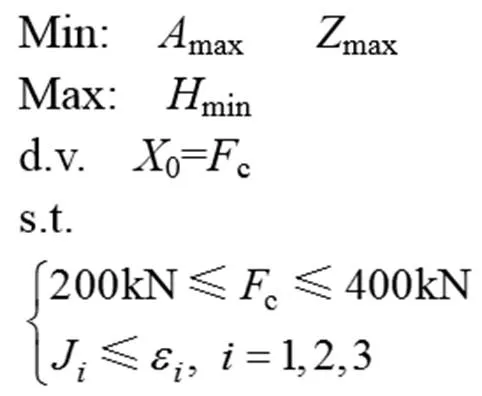
为提高运载火箭的着陆性能,使铝蜂窝缓冲器的缓冲力在满足设计缓冲行程的条件下能适用于多种着陆工况,取铝蜂窝缓冲力作为单一设计变量,将最小化max和max,最大化min作为优化目标,铝蜂窝缓冲器的最大缓冲行程max不得超过设计行程作为约束条件,采用NSGA-II算法和模拟退火算法在内的多学科协同优化方法,在多工况条件下对铝蜂窝缓冲力进行寻优。通过前期抽取大量不同的铝蜂窝缓冲力值进行动力学仿真得出,当尝试以200kN左右缓冲力仿真着陆时,几乎达到了缓冲行程极限,当设置为400kN左右的缓冲力时,缓冲器几乎起不到缓冲效果,箭体冲击载荷会过大,故分析后选择了200~400kN这个缓冲力取值范围,初始值预设为300kN。将整个优化过程分为系统级和三个学科级,其中系统级用来对max、max、min进行多目标优化,学科级用来最小化多学科优化函数,学科级一分析工况1下的模型,学科级二分析工况2下的模型,学科级三分析工况3下的模型。
综上所述,在以三种着陆工况作为学科级协同优化的基础之上,进行运载火箭软着陆性能的多目标优化,其数学模型为
系统级:

学科级:
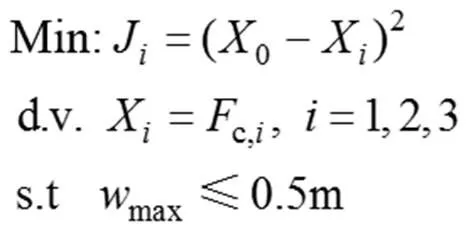
式中为学科级内部的设计变量。
3.3 基于代理模型的求解
由于寻优过程需要不断调用动力学模型进行求解,为提高计算效率,采用响应面模型来近似代替各着陆工况下的动力学模型。在动力学模型中,运载火箭的四组着陆支腿均布于箭体结构下端,整机具有对称性,主要研究着陆缓冲装置在平面空间以四腿同时触地、1-2-1及2-2着陆模式时的性能[15],为在符合实际情况基础上便于对模型的分析,针对该构型建立的动力学模型做出如下假设:
1)忽略各构件尺寸的加工误差、装配误差及摩擦力的影响;
1 2012年9月,拜厄特作为英国文化协会“艺述英国”活动的特邀嘉宾来华,与中国文化界代表展开对话。南京大学学者徐蕾对她进行了专访,并在《当代外国文学》上发表了题为“神话﹒历史﹒语言﹒现实:A.S.拜厄特访谈录”的文章。
2)构件两端均被铰链连接,可近似为二力杆,即仅受轴向的拉压力;
3)基于赫兹接触理论来定义足垫与地面的接触力计算模型。
其中,对于铝蜂窝缓冲器,将经过预压缩的铝蜂窝在动态压溃下的缓冲力–缓冲行程特性看作阶跃型曲线,其表达式为[6]

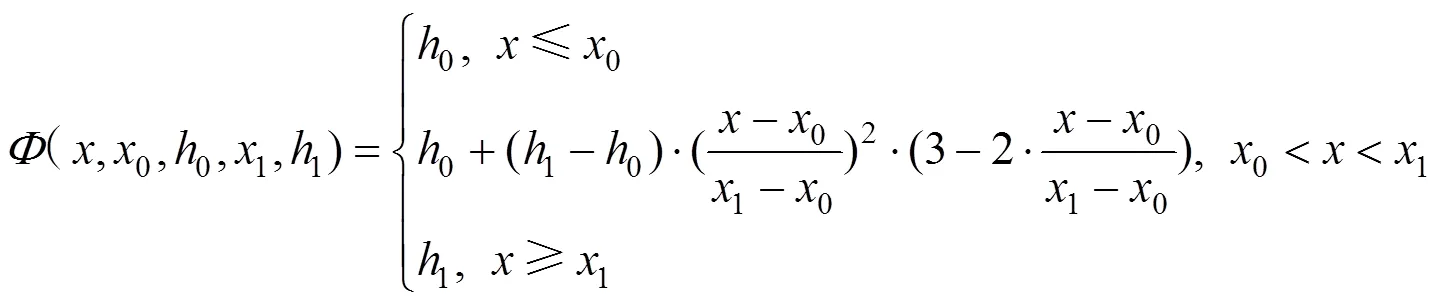
式中为自变量;(0,0)、(1,1)为阶跃点。
足垫与地面的作用力表达式为[17]

基于上述动力学模型,通过拉丁超立方抽样[18]在缓冲力取值区间抽取1 000个样本点,仿真得到缓冲行程和各着陆响应,拟合出响应面模型[19],在样本点中抽取50组检验点检测代理模型精度,常用的代理模型精度评价指标有相对均方根误差RMSE和决定系数2[20],相对均方根误差RMSE为真值和代理模型值之间的差值与真值平均幅值的比例,越趋于0则代表拟合程度越高,决定系数2为真值和代理模型之间的总体差异程度,越趋于1则代表拟合程度越高,其最终得到的代理模型拟合精度如 表4所示。
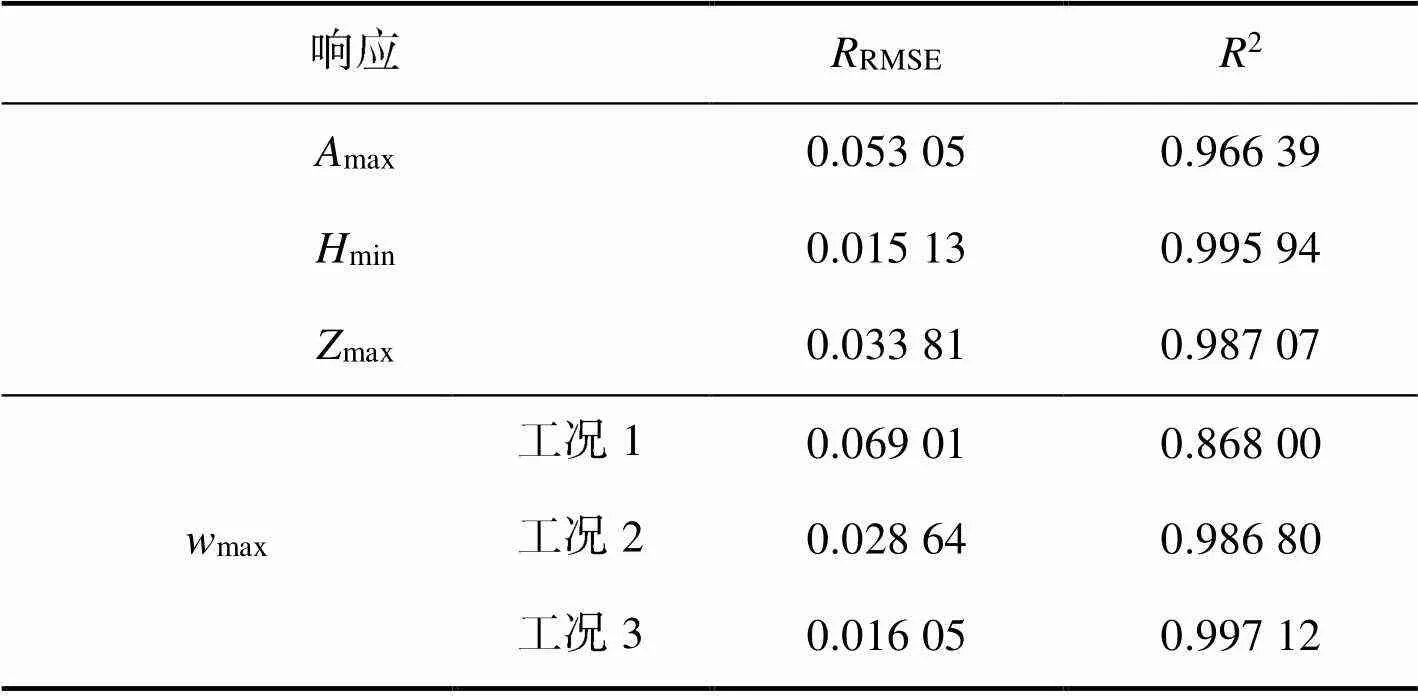
表4 代理模型精度
基于上述得到的响应面代理模型,系统级采用带有精英保留策略的快速非支配多目标优化算法NSGA-II[21],其优化目标的权重因子和比例因子如表5所示,学科级采用模拟退火算法,在设计变量的取值区间内进行多目标优化求解,并得到了运载火箭软着陆性能优化流程如图9所示。
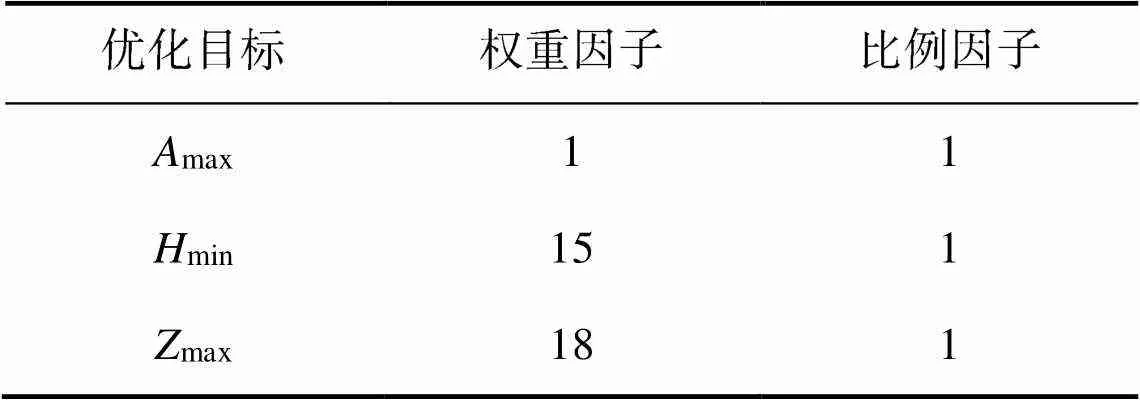
表5 优化目标的无量纲化
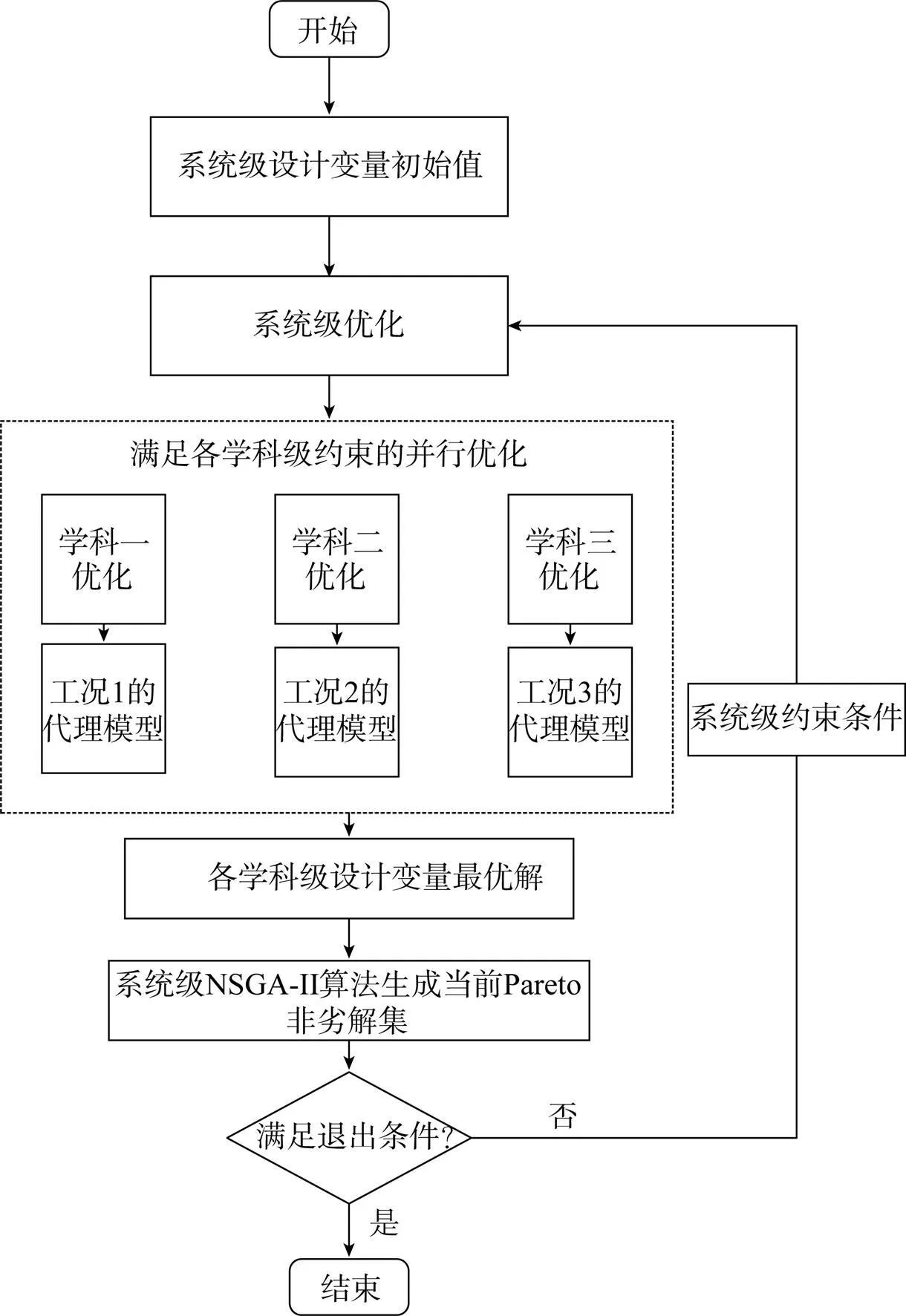
图9 优化流程
3.4 寻优结果
通过上述设定的着陆工况、寻优策略和优化流程,将最小化max和max,最大化min作为优化目标,对铝蜂窝缓冲力c进行迭代求解,得到了如图10所示的Pareto前沿图[22],当取迭代寻优过程中最大加速度的最小值时,max和min均符合着陆性能判断指标,对应的铝蜂窝缓冲力c为254.640kN,将其设为寻优结果。
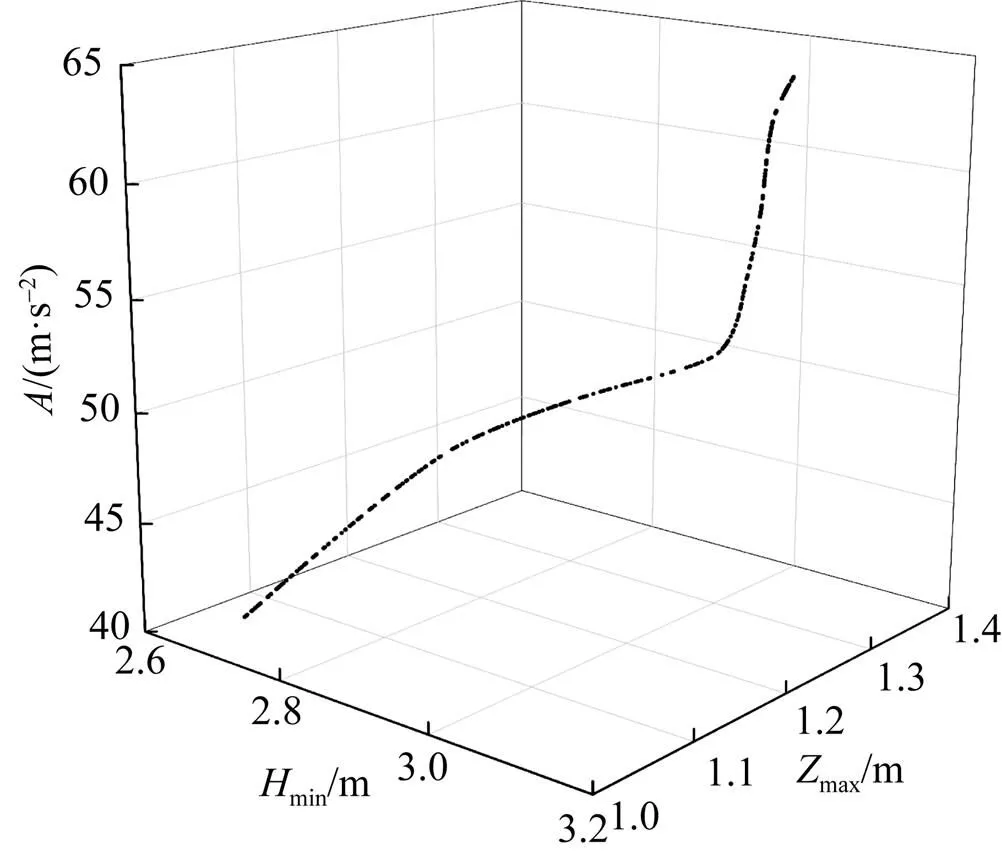
图10 优化目标的Pareto前沿图
为了进一步验证代理模型拟合的准确性,将寻优后的缓冲力c代入到各工况动力学模型中,得到了相应的着陆响应数值和铝蜂窝缓冲行程,与代理模型对比如表6所示。由表6可得,动力学模型结果与代理模型的结果误差均不超过3%,可以满足工程要求。
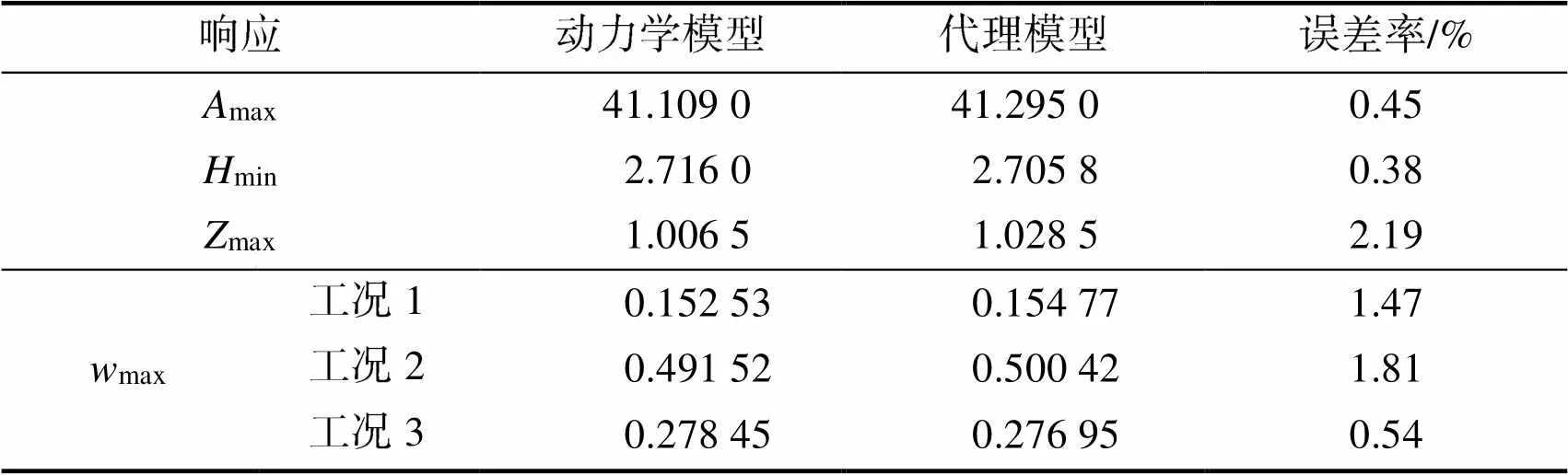
表6 代理模型与动力学模型计算结果对比
4 多工况动力学仿真
为了观测运载火箭着陆缓冲时在上述定义的各工况下的加速度、箭体离地距离、足垫离地距离的变化情况,将寻优后的缓冲力c带入到各工况动力学模型中[23],如图11所示,仿真后得到了如图12所示各着陆响应随时间变化曲线。其中:各工况下的加速度变化、箭体离地距离测量方法与第2节中的着陆性能判断指标定义相同;工况1、2的足垫离地距离为在仿真时,对比各足垫的反弹高度,挑选出反弹高度最高的足垫,测量此足垫的离地距离变化,工况3的足垫离地距离与第2节中的着陆性能判断指标中相同。由图12(a)可知,工况1相对于其他两种工况更易产生最大加速度,工况2为“1-2-1”着陆模式,在第一组着陆腿触地缓冲时,并未造成较大冲击,铝蜂窝接近设计缓冲行程极限,在“2”的两组着陆腿触地时才产生较大的冲击加速度,最后一组着陆腿触地时对箭体影响甚微,工况3为“2-2”着陆模式,在仿真时间内可以看出,每隔一定时间就会产生一个较为明显的波峰,这是由此着陆模式导致运载火箭着陆后短时间内的左右摇摆造成的。由图12(b)可知,工况2更易导致箭体最小离地距离,其最小距离为2.7m,可满足设计要求。由图12(c)可知,各工况均有一个较为明显的峰值,表示足垫会出现最大离地距离,此时箭体最易发生倾覆,但各工况的足垫最大离地距离均在设计指标内,可保证运载火箭正常着陆。
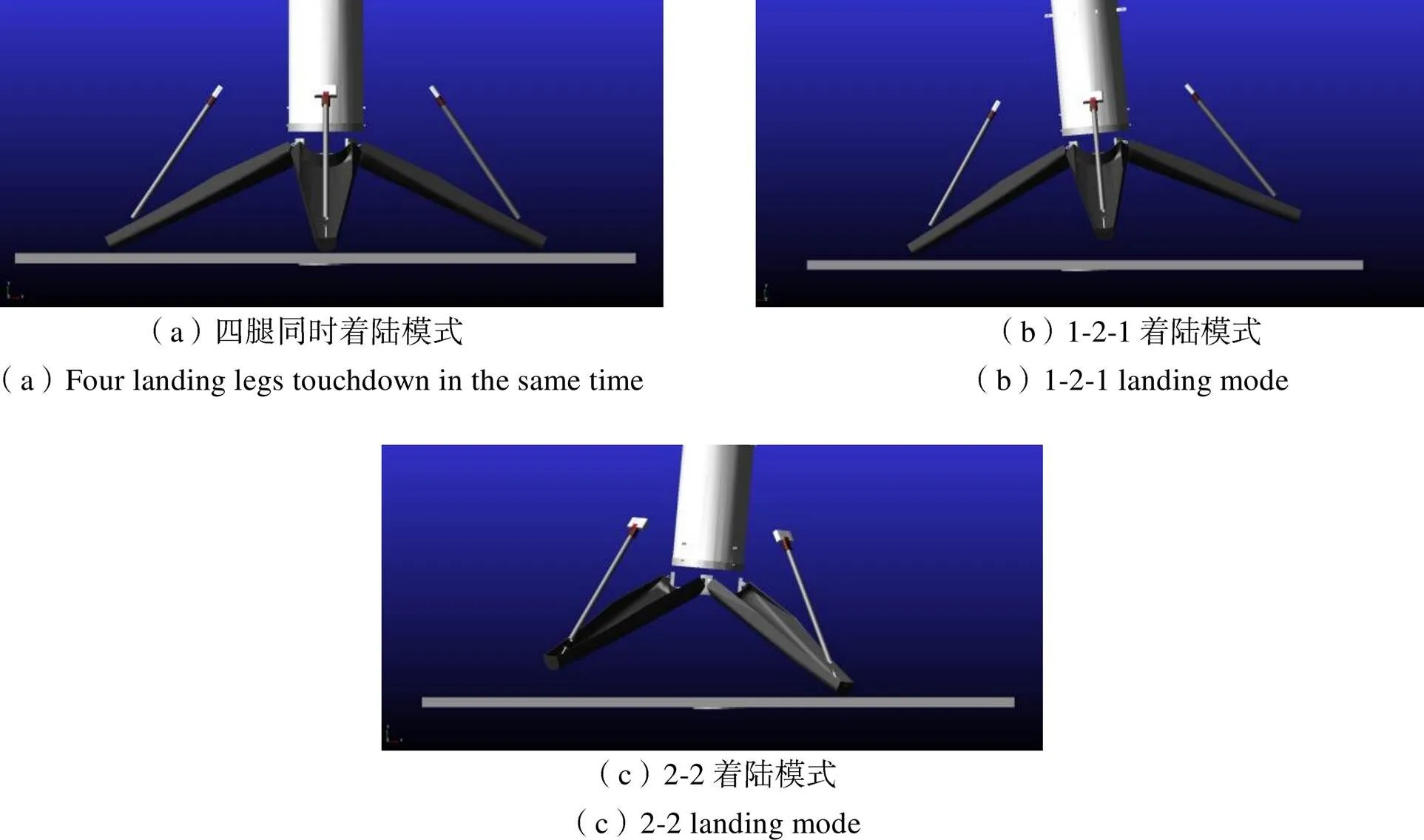
图11 动力学仿真模型
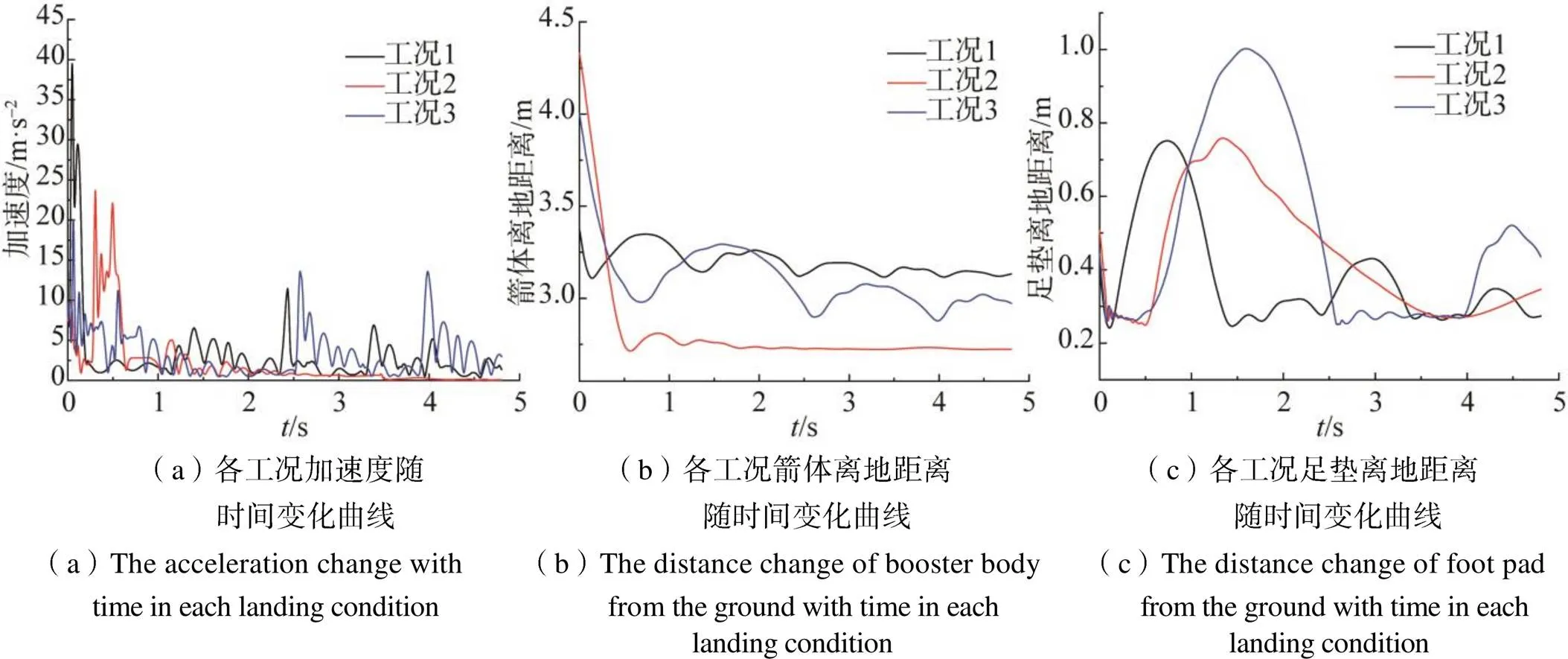
图12 多工况着陆响应曲线
5 结束语
本文提出了一种适用于运载火箭回收软着陆的着陆缓冲装置,介绍了其结构布局及工作原理,建立了着陆腿展开过程的运动学模型并验证了其准确性。确定了运载火箭的着陆工况和软着陆性能指标,采用多学科协同优化方法对铝蜂窝缓冲力在设计缓冲行程内进行寻优,使得各着陆响应尽可能满足软着陆性能指标。基于寻优后的铝蜂窝缓冲力,进行动力学仿真分析,得到了各着陆响应随时间的变化曲线,分析可知各着陆响应均满足设着陆性能指标要求,着陆缓冲装置可有效降低着陆冲击并在着陆后起到支撑箭体的作用。
[1] 陈海鹏, 魏威, 牟宇, 等. 美国私营航天运输系统企业创新解析[J]. 中国航天, 2016(10): 30-33.
CHEN Haipeng, WEI wei, MOU Yu, et al. Analysis on Inovation of Private Space Transportation System Enterprises in the United States[J]. Aerospace China, 2016(10): 30-33. (in Chinese)
[2] 郑雄, 杨勇, 姚世东, 等. 法尔肯9可重复使用运载火箭发展综述[J]. 导弹与航天运载技术, 2016(2): 39-45.
ZHENG Xiong, YANG Yong, YAO Shidong, et al. Survey and Review on Development of Falcon9 Reusable Rocket[J]. Missile and Space Vehicle, 2016(2): 39-45. (in Chinese)
[3] 冯韶伟, 马忠辉, 吴义田, 等. 国外运载火箭可重复使用关键技术综述[J]. 导弹与航天运载技术, 2014(5): 84-88.
FENG Shaowei, MA Zhonghui, WU Yitian, et al. Servey and Review on Key Technologies of Reusable Launch Vehicle Abroad[J]. Missile and Space Vehicle, 2014(5): 84-88. (in Chinese)
[4] 王辰, 王小军, 张宏剑, 等. 可重复使用运载火箭发展研究[J]. 飞航导弹, 2018(9): 18-26.
WANG Chen, WANG Xiaojun, ZHANG Hongjian, et al. Reusable Launch Vehicle Development Research[J]. Aerodynamic Missile Journal, 2018(9): 18-26. (in Chinese)
[5] 雷波, 张明, 岳帅. 可重复使用运载器的耐坠毁缓冲装置的设计优化[J]. 宇航学报, 2019, 40(9): 996-1004.
LEI Bo, ZHANG Ming, YUE Shuai. Design and Optimization of a Crashworthy Damper Used for Reusable Launch Vehicles[J]. Journal of Astronautics, 2019, 40(9): 996-1004. (in Chinese)
[6] 岳帅, 聂宏, 张明, 等. 一种用于垂直降落重复使用运载器的缓冲器性能分析[J]. 宇航学报, 2016, 37(6): 646-656.
YUE Shuai, NIE Hong, ZHANG Ming, et al. Analysis on Performance of a Damper Used for Vertical Landing Reusable Launch Vehicle[J]. Journal of Astronautics, 2016, 37(6): 646-656. (in Chinese)
[7] 毕春莹. 可回收火箭平行四边形式着陆机构设计及稳定性分析[D]. 哈尔滨: 哈尔滨工业大学, 2016.
BI Chunying. Design and Stability Analysis of Landing Mechanism with Parallelogram Structure for Recylable Rocket[D]. Harbin: Harbin Institute of Technology, 2016. (in Chinese)
[8] 田保林. 垂直起降可重复使用运载器支腿的折展与锁紧机构设计[D]. 哈尔滨: 哈尔滨工业大学, 2019.
TIAN Baolin. Design of Folding and Locking Mechanism for Repetitive Use of Carrier for Vertical Take-off and Landing[D]. Harbin: Harbin Institute of Technology, 2019. (in Chinese)
[9] 李萌, 刘荣强, 罗昌杰, 等. 铝蜂窝串联缓冲结构静态压缩仿真与试验研究[J]. 振动与冲击, 2013, 32(9): 50-56.
LI Meng, LIU Rongqiang, LUO Changjie, et al. Numerical and Experimental Analysis on Series Aluminum Honeycomb Structures under Quasi-static Load[J]. Journal of Vibration and Shock, 2013, 32(9): 50-56. (in Chinese)
[10] 刘荣强, 罗昌杰, 王闯, 等. 腿式着陆器缓冲材料缓冲特性及其表征方法研究[J]. 宇航学报, 2009, 30(2): 786-794.
LIU Rongqiang, LUO Changjie, WANG Chuang, et al. Study on Cushion Properties and Its Characterization Methods of Legged Landerʹs Cushion Materials[J]. Journal of Astronautics, 2009, 30(2): 786-794. (in Chinese)
[11] 董威利, 刘莉, 周思达, 等. 月球探测器软着陆动力学及影响因素分析[J]. 宇航学报, 2014, 35(4): 388-396.
DONG Weili, LIU Li, ZHOU Sida, et al. Analysis on Soft-landing Dynamics and Influence Factors of Lunar Lander[J]. Journal of Astronautics, 2014, 35(4): 388-396. (in Chinese)
[12] 陈金宝, 聂宏, 赵金才, 等. 月球探测器软着陆缓冲机构着陆性能分析[J]. 宇航学报, 2008, 29(6): 1729-1732.
CHEN Jinbao, NIE Hong, ZHAO Jincai, et al. Research of the Factors of Buffering Performance in Lunar Lander[J]. Journal of Astronautics, 2008, 29(6): 1729-1732. (in Chinese)
[13] 田红旗. 风环境下的列车空气阻力特性研究[J]. 中国铁道科学, 2008(5): 108-112.
TIAN Hongqi. Study on the Characteristics of Train Air Resistance under Wind Environment[J]. China Railway Science, 2008(5): 108-112. (in Chinese)
[14] 蒋鲁佳, 辛万青. 协同优化方法算例研究[J]. 计算机应用, 2008, 28(S2): 111-113.
JIANG Lujia, XIN Wanqing. Case Study of Collaborative Optimization[J]. Journal of Computer Applications, 2008, 28(S2): 111-113. (in Chinese)
[15] LAVENDER R E. Monte Carlo Approach to Touchdown Dynamics for Soft Lunar Landing: NASA-TN-D-3117[R]. 1965.
[16] 钟小勇, 李凤英. ADAMS函数使用技巧[J]. 装备制造技术, 2018(11): 100-102.
ZHONG Xiaoyong, LI Fengying. Usage Skills of Several Adams Functions[J]. Equipment Manufacturing Technology, 2008(11): 100-102. (in Chinese)
[17] 朱汪, 杨建中. 月球着陆器软着陆机构着陆稳定性仿真分析[J]. 宇航学报, 2009, 30(5): 1792-1796.
ZHU Wang, YANG Jianzhong. Touchdown Stability Simulation of Landing Gear System for Lunar Lander[J]. Journal of Astronautics, 2009, 30(5): 1792-1796. (in Chinese)
[18] JIN R C, CHEN W, SUDJIANGTO A. An Efficient Algorithm for Constructing Optimal Design of Computer Experiments[C]//ASME 2003 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, September 2-6, 2003, Chicago, USA. N.Y.: American Society of Mechanical Engineers, 2003.
[19] 穆雪峰, 姚卫星, 余雄庆, 等. 多学科设计优化中常用代理模型的研究[J]. 计算力学学报, 2005, 22(5): 608-612.
MU Xuefeng, YAO Weixing, YU Xiongqing, et al. A Survey of Surrogate Models Used in MDO[J]. Chinese Journal of Computational Mechanics, 2005, 22(5): 608-612. (in Chinese)
[20] 展铭, 郭勤涛. 代理模型在结构动力学优化设计中的应用研究[J]. 机械与电子, 2015(1): 7-12.
ZHAN Ming, GUO Qintao. A Study of Meta-model in Structural Dynamic, Optimization Design[J]. Machinery & Electronics, 2015(1): 7-12. (in Chinese)
[21] 赵树恩, 杨明森, 彭光旭. 基于NSGA-II混合灵敏度分析的白车身轻量化优化设计[J]. 机械强度, 2019, 41(4): 887-894.
ZHAO Shuen, YANG Mingsen, PENG Guangxu. Lightweight Optimization Design of Body-in-white Based on NSGA-II Mixed Sensitivity Analysis[J]. Journal of Mechanical Strength, 2019, 41(4): 887-894. (in Chinese)
[22] 华一村, 刘奇奇, 郝矿荣, 等. 非规则Pareto前沿面多目标进化优化算法研究综述[J]. 郑州大学学报(工学版), 2021, 42(1): 1-6.
HUA Yicun, LIU Qiqi, HAO Kuangrong, et al. A Survey of Evolutionary Algorithms for Multi-objective Optimization Problems with Irregular Pareto Fronts[J]. Journal of Zhengzhou University (Engineering Science), 2021, 42(1): 1-6. (in Chinese)
[23] 贾山, 赵建华, 胡汝洁, 等. 可复用小型月表着陆器设计优化及仿真分析[J]. 宇航学报, 2022, 43(3): 356-364.
JIA Shan, ZHAO Jianhua, HU Rujie, et al. Design Optimization and Simulation of Reusable Small Lunar Lander[J]. Journal of Astronautics, 2022, 43(3): 356-364. (in Chinese)
Unfolding and Landing Analysis of Reusable Rocket Landing Device
JIA Shan1,2,3ZHAO Jianhua1,2,3CHEN Jinbao1,2,3WANG Yongbin1,3,4
(1 Academy of Astronautics, Nanjing University of Aeronautics and Astronautics, Nanjing 211106, China)(2 Key Laboratory of Mechanism for Deep Space Planet Surface Exploration, Ministry of Industry and Information Technology, Nanjing 211106, China)(3 Laboratory of Aerospace Entry, Descent and Landing Technology, Nanjing 211106, China)(4 Beijing Institute of Space Mechanics & Electricity, Beijing 100094, China)
In order to meet the technical requirements of vertical recovery of reusable launch vehicle ,a new landing buffer device is proposed in this paper, its internal configuration and working principle are introduced, and its practicability is verified by kinematic and dynamic analysis. A kinematic model of the unfolding process of a single set of cushioning device is established. The accuracy of the unfolding process kinematic equation is verified by comparing the data obtained in Adams simulation software. The landing buffer device uses the aluminum honeycomb to absorb the impact energy whlie the rocket is landing. When the landing weight is known, based on the three representative landing conditions of the launch vehicle and response surface model, by using the multi-objective collaborative optimization method, an ideal honeycomb compression force value is obtained. Finally, based on the above results, a multi-condition landing shock simulation is carried out. The results show that the device can effectively reduce the impact acceleration and support rocket body, which can provide a reference for subsequent design and development in related fields.
reusable launch vehicle; aluminum honeycomb; multi-objective collaborative optimization; stability; landing buffer
V445.4
A
1009-8518(2022)05-0011-13
10.3969/j.issn.1009-8518.2022.05.002
2022-02-15
国家科技专项项目(20-163-03-ZT-002-010-03);国家自然科学基金面上项目(52075242);国家科技专项项目(2021-JCJQ-JJ-0233)
贾山, 赵建华, 陈金宝, 等. 可复用运载火箭着陆装置展开与着陆分析[J]. 航天返回与遥感, 2022, 43(5): 11-23.
JIA Shan, ZHAO Jianhua, CHEN Jinbao, et al. Unfolding and Landing Analysis of Reusable Rocket Landing Device[J]. Spacecraft Recovery & Remote Sensing, 2022, 43(5): 11-23. (in Chinese)
贾山,男,1983年生,2016年获东南大学机械电子工程专业博士学位,副教授。主要研究方向是深空星表探测机构技术、航天进入减速与着陆技术。E-mail:jiashanazz@nuaa.edu.cn。
(编辑:庞冰)
猜你喜欢
航天制造技术(2022年4期)2022-09-30
空气动力学学报(2022年4期)2022-08-23
黑龙江大学自然科学学报(2022年1期)2022-03-29
现代装饰(2021年1期)2021-03-29
四川冶金(2019年5期)2019-12-23
知识就是力量(2018年3期)2018-03-08
航空模型(2017年3期)2017-07-28
太空探索(2016年12期)2016-07-18
浙江大学学报(工学版)(2015年2期)2015-05-30
火炸药学报(2014年1期)2014-03-20