
非均匀路段交通流的元胞自动机模拟
2022-11-15 05:56周文海李舒健董力耘
上海大学学报(自然科学版) 2022年4期
周文海,李舒健,董力耘,
(1.上海大学力学与工程科学学院上海市应用数学和力学研究所,上海 200072;2.上海市能源工程力学重点实验室,上海 200072)
大多数城市的地面道路通过设置交通灯来均衡路网中的车流运行,减少延误时间和尾气污染,提高路网的通行效率.因此,与高速公路或城市快速路的连续交通流不同,地面道路交通流是受到交通灯控制的间断交通流.间断交通流具有与连续交通流显著不同的性质.在高速公路上观察到的一些自组织现象,在地面道路可能难以观察到,这一方面是由于地面道路较短,车流无法充分演化,另一方面地面道路受交通灯的影响较大.交通灯作为城市地面道路系统的重要交通设施,对交通网络的运行效率影响极大.合理的交通灯控制策略可以提高道路网络的整体运行水平,因此这个问题一直是人们关注的热点.
1992年Nagel等[1]提出了描述高速公路交通流的元胞自动机模型(NaSch模型).此后,元胞自动机模型被广泛用于交通流的建模和模拟.国内外研究者提出了许多改进模型,如考虑慢启动效应的VDR(velocity-dependent-randomization)模型[2].Jiang等[3]提出了交通灯控制下考虑停车时间的元胞自动机交通流模型,该模型将NaSch模型中的随机慢化概率与停车时间相关联(停车时间越长,慢化概率越大).李春盛等[4]的研究表明,在交叉路口设置智能交通灯,显著提高了主干道车辆的平均速度和流量.郑容森等[5]建立了开放边界条件下路口等距分布的主干道交通流模型,该模型设定路口由同步交通灯控制,数值模拟结果显示:在低密度下,流量与路口数无关;在高密度下,流量和路口路数有关;调整交通灯周期可改善主干道通行能力.Mhirch等[6]研究了开放边界和周期边界条件下由固定周期交通灯控制的单车道交通流模型,并给出了进车概率、出车概率、绿灯持续时间和事故发生概率的关系.Aleko等[7]提出一种连续路口模型,该模型根据动态更新在路口等待的车辆数量,对红灯相位增加一段延时以同步连续路口主干道的绿灯相位.值得注意的是,自组织交通灯为城市地面道路交通流的优化提供了一种可行的方式,且仅需要局部道路的交通信息.Gershenson[8]发现自组织交通灯能够自我组织并适应不断变化的交通状况,减少等待时间和停车数量,提高平均速度.Gershenson等[9-10]评估了自组织方法和传统的绿波法两种交通灯策略对于单车道网络模型的控制效果,模拟结果表明在很大的密度范围内,自组织方法优于绿波方法.Cesme等[11]研究了一种用于交通信号控制的范式,该范式基于局部规则创建协调机制,通过VISSIM软件进行模拟,结果表明总体延迟减少.Zapotecatl等[12]提出了一种使用简单的传感器来实现自组织交通灯协调的新方法.Zou等[13]提出了一个自组织模型来设计有效的交通信号策略,研究结果表明,基于自组织的策略在排队长度和等待时间方面都明显优于固定策略和基于触发的调度策略.
与连续交通流相比,从交通流模型角度研究间断交通流的工作相对较少.目前大多数研究以单个十字路口或均匀路段的情形为主,而对于路段长度不同的多路段道路研究相对较少.在非均匀路段上如何实现绿波控制也是一个有趣而值得研究的问题.因此,本工作采用元胞自动机模型研究单车道多路段系统中非均匀路段下不同交通灯控制策略对系统的影响,并重点关注绿波现象.
1 模型和交通灯控制策略
1.1 考虑交通灯影响的细化VDR模型
日常生活中人们常能观察到车辆的延迟启动,这在城市地面道路交通流中尤其明显,如绿灯刚启亮时因司机反应迟钝所导致的慢启动.因此,本工作采用考虑慢启动的VDR模型[2]为基本模型.原始VDR模型中,一个元胞的尺寸为7.5 m.一方面,车辆变速时的加速度不小于7.5 m/s2,相当于急加速或急减速,车速变化过于剧烈;另一方面,交通拥堵时车间距一般都小于车长,如果采用较大的元胞尺寸,则会导致车间距为0,无法再现真实交通中车辆在小间距下仍可起动这一现象.为了更准确地描述车辆的运动过程,本工作采用细化的元胞,即每个元胞的尺寸为1 m.此外,模型还需引入交通灯的影响.
假定第i辆车在t时刻的位置和速度分别为xi(t)和vi(t),且该车辆当前位于第n个路段,对应的路口位置为Xn,车辆的运动规则如下.
(1)确定随机减速概率pd.

式中:p0、p1分别为静止、运动车辆的减速概率值,且p0≫p1.这表明在t时刻处于静止状态的车辆有更大的减速概率,平均启动延迟时间会更久.
(2)确定车辆的间距.
当第n个路口为绿灯时,车辆可以通行,第i辆车与前车的间距为

式中:xi+1(t)是第i辆车前方紧邻车辆的位置;lc为车辆长度.本工作中假设所有车辆长度相等,即lc为常数.当第n个路口为红灯时,抵达路口的第i辆车不能越过停车线的位置X(n),因此其与前车的间距为

另外,绿灯转红灯时已经通过停车线而尚未完全越过路口的车辆不受当前红灯的影响,继续行驶.
(3)加速.

式中:t′表示中间时间步;vmax为车辆的最大速度或路段限速.
(4)基于安全考虑的减速.

式中:t′′表示中间时间歩;ds为安全间距.本工作采用细化的模型,因此车辆的最小间距ds不必为0.在真实交通中,即使拥堵时相邻的车辆也会保持间距1~2 m,但在原始VDR模型中因元胞尺寸太大无法刻画这种现象.
(5)以概率pd随机减速.

(6)车辆的运动.

模拟中车辆的运动采取并行更新方式.由于采用周期边界条件,研究场景为多个路段(单车道)组成的环形道路,车辆仅沿一个方向运动,且在路口也不会转出或转入,因此车辆数是守恒的.
1.2 交通灯控制策略
1.2.1 交通灯同相和反相
图1所示为周期边界条件下的多路段交通流,共有6个路段,1~6表示路口所在位置,路口所对应的上游路段用同样的数字表示,如路段1为路口1和路口6之间的路段.假设交通灯仅有红灯和绿灯两种状态,交通灯的信号周期为C,绿灯和红灯周期分别为TG和TR,则有C=TG+TR,且绿信比λ=TG/C.假定TG=TR,则有λ=0.5,但不同交通灯之间可以有相位差.交通灯同相是指所有交通灯在任意时刻都保持同步,或同为红灯,或同为绿灯.同相交通灯并不要求TG=TR.交通灯反相是指相邻两交通灯在任意时刻都处于不同的状态,在这种情况下,必有TG=TR.
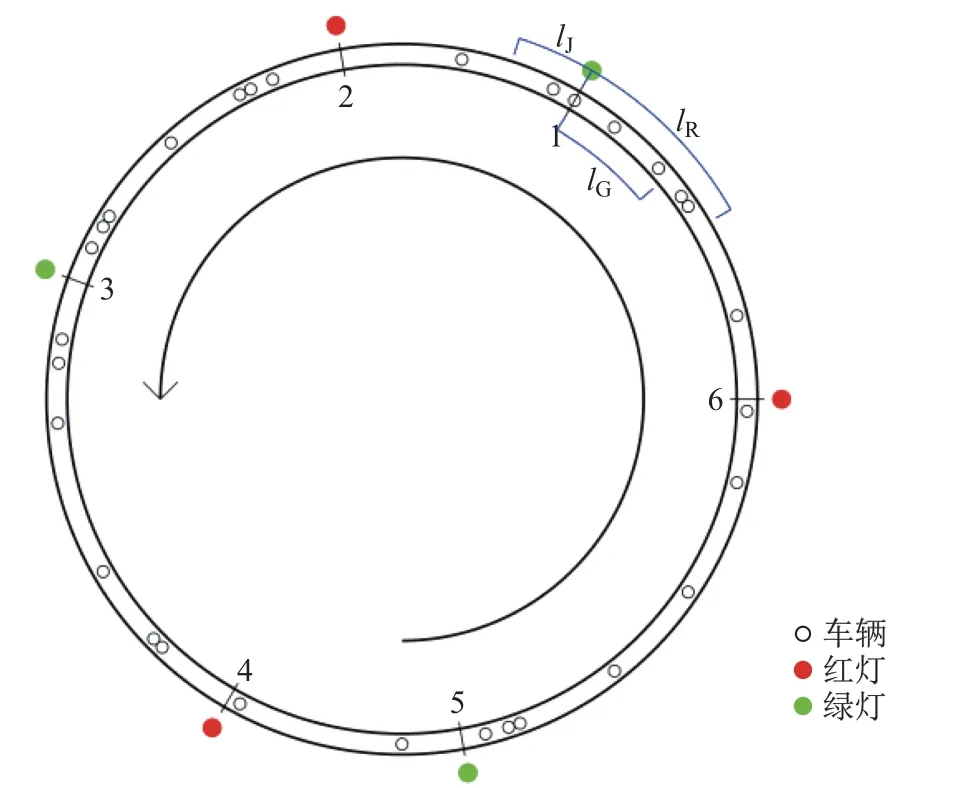
图1 周期边界条件下非均匀路段交通灯示意图Fig.1 Schematic diagram of traffic lights on non-uniform road sections under periodic boundary condition
1.2.2 自组织交通灯
自组织交通灯是指根据局部交通信息动态调整红绿灯周期的长度.绿灯期间,如果停车线后一段距离内没有经过车辆,则可提前切换为红灯;红灯期间,如果车辆排队长度超过一个阈值,就可以强制切换为绿灯[8].
本工作借鉴文献[12]设计自组织交通灯的控制算法,由于仅考虑了单向的车流,不但给定了最短绿灯时间和最长绿灯时间,而且设定了最短红灯时间和最长红灯时间,其中lR、lG和lJ如图1所示.
(1)在红灯状态,设置一个计数器:①当车辆排队长度超过阈值lR且下游有足够的空间(在交通灯前方lJ内没有静止的车辆)时,则切换为绿灯,否则仍保持红灯状态;②当红灯周期超过时,则强制转换为绿灯;③红灯状态一旦开启,至少要保持才能切换为绿灯.
(2)在绿灯状态,设置一个计数器:①当路口上游附近(停车线后lG范围内)有车辆要通过路口时,则保持绿灯;②路口上游附近无车时转红灯,而当绿灯周期超过时,则强制转换为红灯;③绿灯状态一旦开启,至少要保持才能切换为红灯.
1.3 交通流特征量
假设m个路段的长度均为ln,则道路总长度道路中仅有一种车辆(小轿车),在周期边界条件下道路中的车辆数守恒,全局密度ρ表示车道上的平均拥挤程度.
考虑相邻两车的最小间距ds,整个车道上可以容纳的最大车辆数为Nmax,全局密度为ρ,系统在每个时间步的平均速度为V(t),系统的平均速度为〈V〉,平均流量为〈J〉,则有

式中:N为当前车道上的总车辆数;Nj为路段j上的车辆数.
2 数值模拟和讨论
本工作中模拟设定参数如下:最大速度vmax=15,车辆长度lc=4,安全间距ds=1,绿信比λ=0.5,静止车辆减速概率ρ0=0.2,运动车辆减速概率ρ1=0.02.假设总路段长度L=5 400,路段数m=6,则平均路段长度lm=900,但是路段2和5的长度通常不等于平均路段长度(l2/=lm,l5/=lm,但l2+l5=2lm).表1为模拟中的路段长度分布,其中第9种情形对应均匀路段.

表1 路段长度分布Table 1 Distribution of road length
2.1 同相和反相交通灯策略
作为对比,首先给出均匀路段时平均流量随信号周期的变化关系.根据自由行驶的车辆通过一个平均长度路段所需的时间定义畅行时间,即

Tf可以作为一个特征时间.下面主要讨论信号周期为Tf整数倍的情况.
图2为均匀路段下平均流量随信号周期的变化曲线.由图2(a)可以看出:低密度下平均流量随信号周期的增加而振荡衰减,相邻峰值所对应的周期差值约为2Tf;当ρ=0.2,0.3时,平均流量随C的增大而持续增加,直到信号周期很大时;对于中高密度,当信号周期足够大时平均流量会随信号周期的增加而明显减小.由于交通灯反相时,总有一半是绿灯,因此低密度下信号灯切换的影响不如交通灯同相那样明显.由图2(b)可以看出,在低密度下,当C>120时,平均流量是随信号周期增加而单调下降.值得注意的是,当C=30,120时均会出现一个显著的峰值,而在C≈60时出现一个谷值(分别对应于“完全绿波状态”和“完全红波状态”),其他流量值所对应的车流状态则介于二者之间,其状态需要具体分析.与同相情况不同,当信号周期较大(C>240)时,高密度下平均流量随信号周期的增加而呈增大的趋势.因此,在较高车辆密度和长信号周期时,信号灯反相策略比同相策略更有效.Brockfeld等[14]利用ChSch模型[15]研究了均匀路网,给出了类似的结果.从交通实践的角度考虑,对低密度车流应采用较短的信号周期,而对高密度车流应采用较长的信号周期,这样道路的平均流量较高.
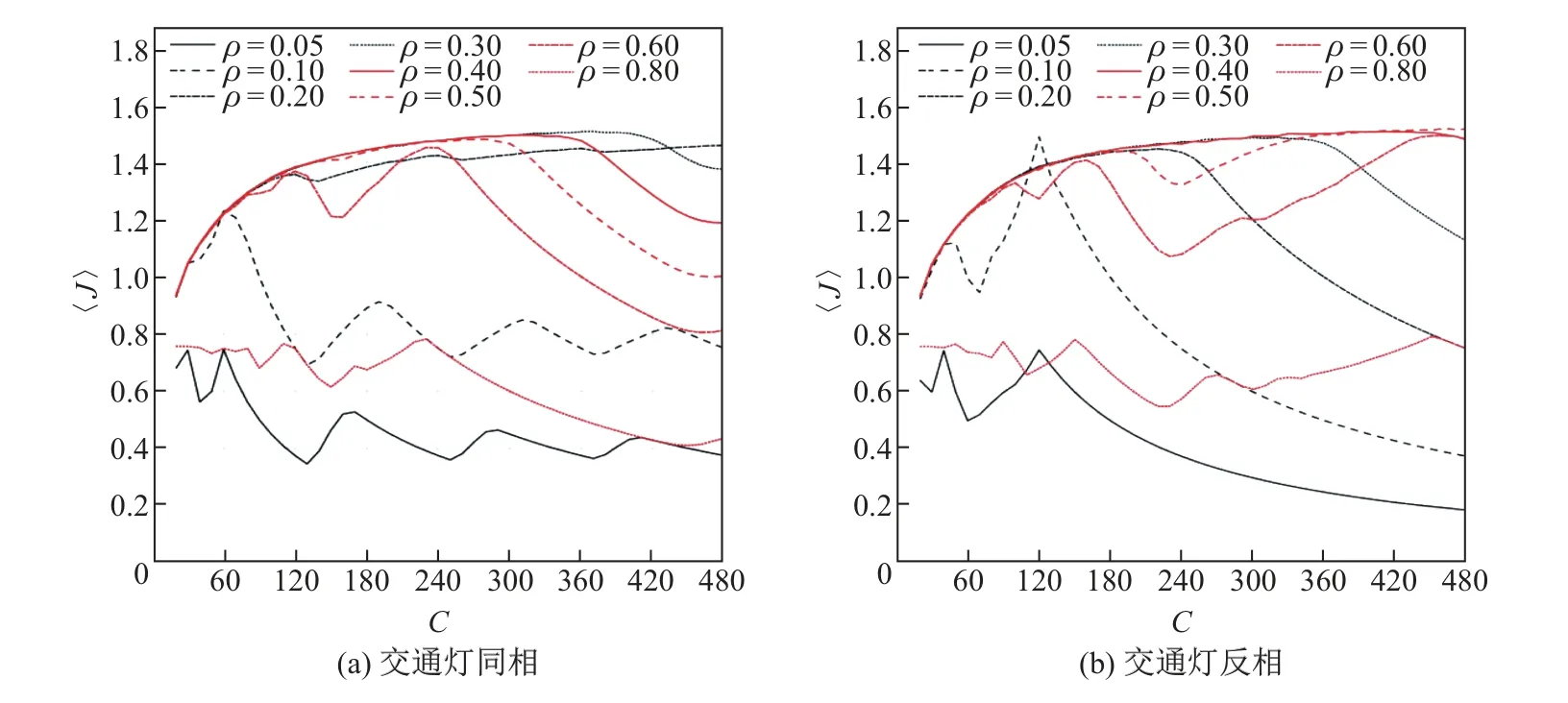
图2 均匀路段下平均流量随信号周期的变化曲线Fig.2 Variation of flux with signal period for uniform sections
图3给出交通灯同相时的路段交通流基本图,可见平均流量〈J〉和平均速度〈V〉依赖于信号周期C和相位.由图3(a)可以看出,对于给定的信号周期C,存在临界密度ρ1和ρ2:当ρ<ρ1时,流量随密度近似线性增长(未饱和状态);当ρ1≤ρ≤ρ2时,出现一个不随密度变化的流量平台(饱和状态);当ρ>ρ2时,流量随密度近似线性减小(过饱和状态).当信号周期C≤360时,随着C的增大,平台流量值逐渐增大,而平台出现的密度范围相应减小,其中ρ1略有增大,而ρ2明显减小.值得注意的是,当ρ<ρ1时,C=60对应的流量曲线斜率最大.从3(b)可以看出,〈V〉≈vmax对应于一种特殊的车流运行状态(完全绿波),即车流运动与绿灯信号完全同步,车队连续通过绿灯路口并一直不会遭遇红灯.这是由于一旦运动中的车队遭遇红灯,就不可能维持这种高速运动状态.
图4给出交通灯反相时的基本图.与交通灯同相时的基本图(见图3)相比,二者具有一些类似的特征,如出现一个流量平台,随着信号周期的增加,其平台流量值增大且对应的密度范围缩小等.但交通灯反相和同相时的基本图也有一些不同的特征:当C=120时,在低密度下会出现完全绿波现象.对比图3(a)和4(a)可以看到,在高密度下,交通灯反相策略更有效.由图4(a)可见,低密度下平均流量确实随着密度呈线性增大(平均速度为常数),而在图3(a)中,C=120,300时的平均流量随密度变化曲线在低密度范围实际由两段斜率不同的直线构成.
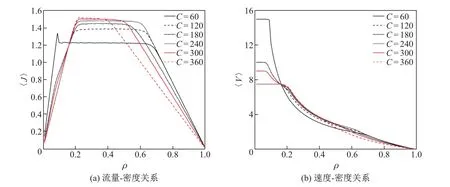
图3 交通灯同相时的基本图Fig.3 Fundamental diagrams for in-phase traffic lights
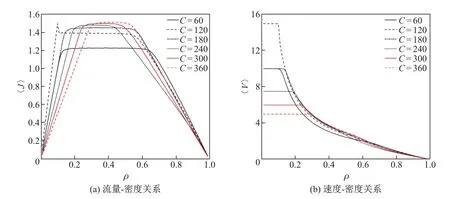
图4 交通灯反相时的基本图Fig.4 Fundamental diagrams for anti-phase traffic lights
典型参数下的平均速度时间序列V(t)可以描述路段交通流状态的特征.图5(a)和(b)分别给出了交通灯同相和反相时的两个特殊车流状态(V(t)≈vmax),即完全绿波状态,参考图3(b)和图4(b).由于交通灯的调制作用,车队的运行与交通灯的切换完全合拍,可以一直维持高速运动状态.达到稳态后,车队行进过程中所遇到的全部都是绿灯,这种状态只有在特定的信号周期和低密度下才可能出现.如对于交通灯反相的情形,出现完全绿波状态的密度可达ρ≈0.10.图5(c)和(d)也是在同样的低密度下,但对应于波谷的位置.由图5(c)可见,绿灯时车队启动,然后在下一个路口遇到红灯(典型的时停时走),这也是司机最不愿意碰到的情况之一.虽然流量是线性增长的,但是其对应车流状态有明显的不同.由图5(d)虽然可以观察到周期性结构的出现,但对应的状态较为复杂.由于当交通灯反相时,总有一半交通灯是绿灯,因此始终会有车流在运动,低密度下不会出现平均速度接近0的情况.
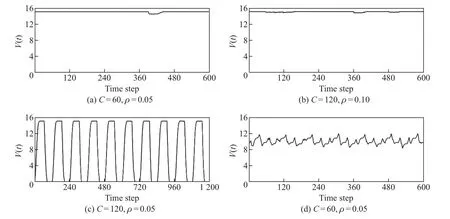
图5 典型参数下的平均速度时间序列Fig.5 Time series of mean speed with typical parameters
图6为非均匀路段的模拟结果.可以看出:当交通灯同相时,路段长度的影响不大;而当交通灯反相时,其影响就很显著,尤其有很短路段时.这是由于交通灯同相时,虽然有很短的路段存在,但是绿灯期间,车辆可以顺利通过短路段,包括部分上游的来流.而在交通灯反相时,短路段形成一个明显的容量瓶颈.在红灯期间,短路段容易发生溢流,而在绿灯期间,只有短路段内的车辆可以通过路口,而上游相邻路口处于红灯期间,上游车辆无法进入下游路段,因而短路段的车辆通行时间不能充分利用.当最短路段长度超过约时,反相交通灯的流量-周期曲线与均匀路段情形接近(见图2).对于复杂的道路网络,路段长短不一,采用交通灯同相控制方式,虽然并非最佳方案,但其实际效果还是可以接受的.如果采用交通灯反相控制策略,则宜选取较小的信号周期,这样具有较高的通行效率.
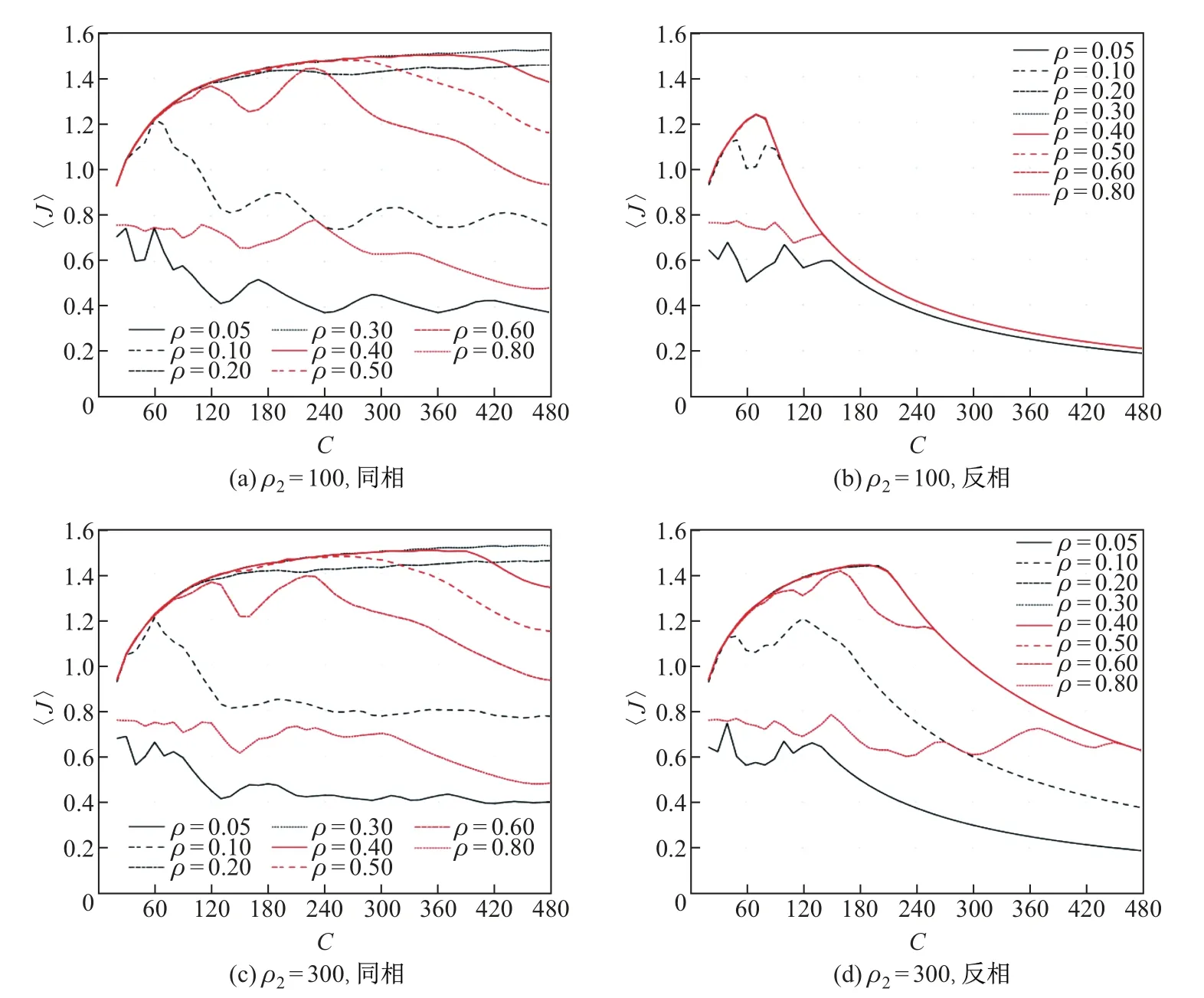
图6 非均匀路段下平均流量随信号周期的变化曲线Fig.6 Variation of flux with signal period for non-uniform sections
图7和8分别给出l2=100,300时反相交通灯的路段交通流基本图.当l2=100时,流量平台所对应的饱和流量值随信号周期C的增大而明显单调减小.这与均匀路段情况时正好相反.此外,流量平台的密度范围明显增大,这也是在图6(b)中仅可明显看到4条曲线的原因,因为ρ=0.2~0.6等所对应的5条曲线均落在流量平台范围内而重合.另外,可以观察到均匀路段时的完全绿波现象消失了.即使在图6(b)中ρ=0.05时流量-周期曲线的两个峰值所对应的状态也不是完全绿波状态(见图9).当l2=300时,不同信号周期时对应的饱和流量明显增大,流量平台的密度范围缩小,可辨识的流量-周期曲线增多,在极低密度下才会出现绿波(见图8(b)).
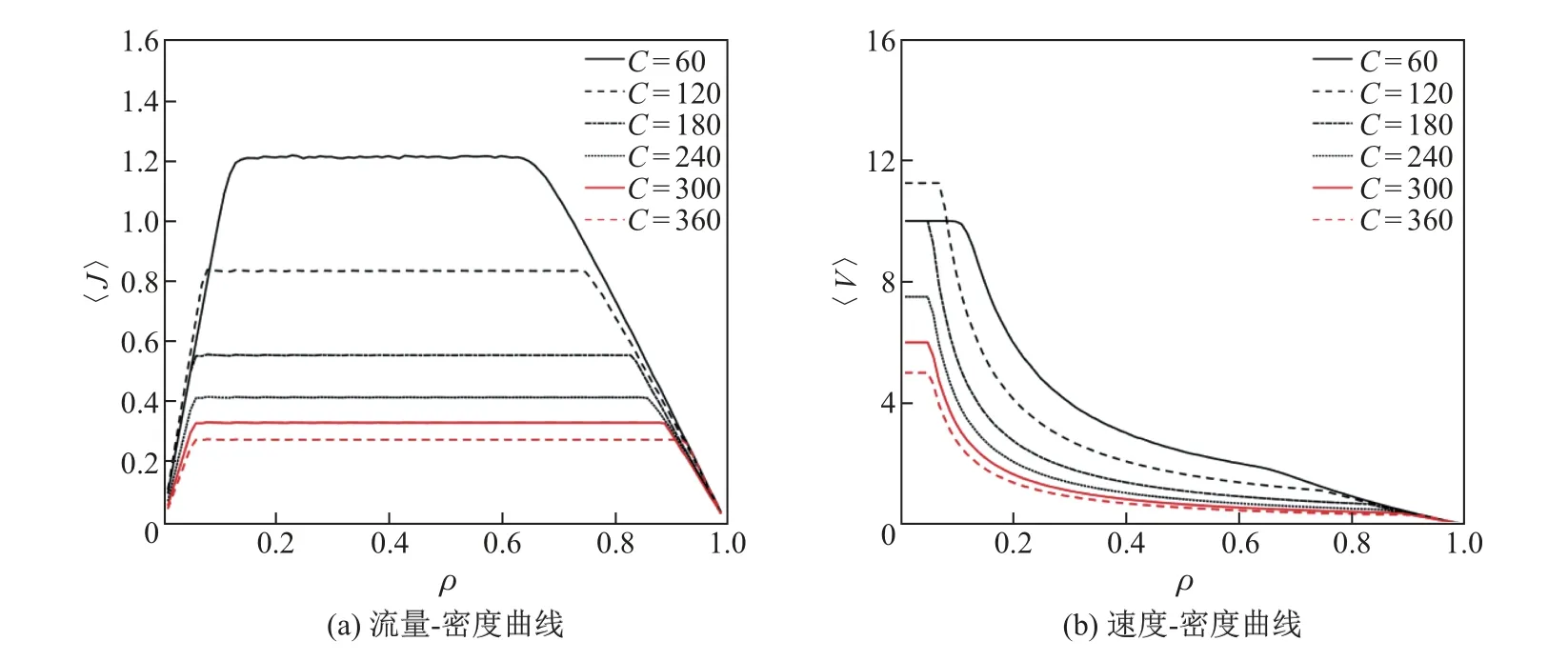
图7 情形1时的基本图(反相)Fig.7 Fundamental diagrams with anti-phase traffic light for Case 1
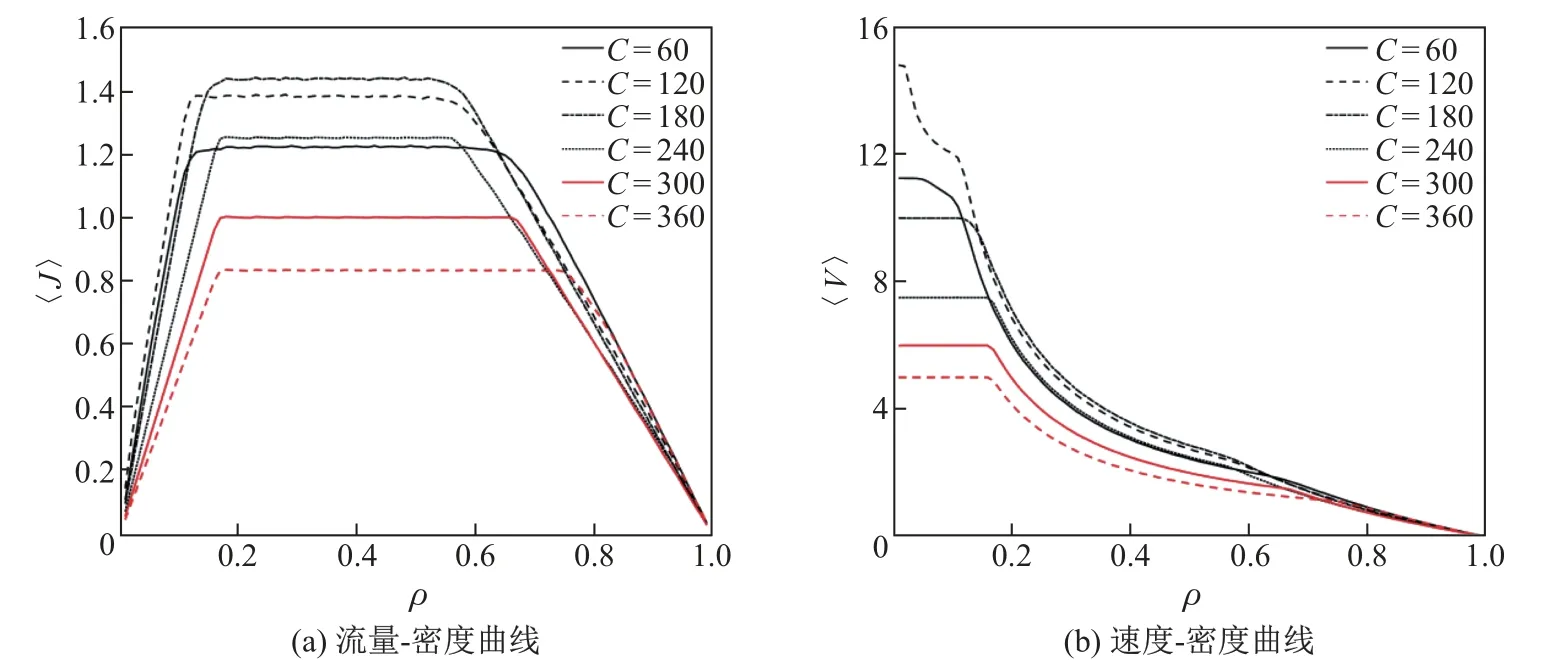
图8 情形3时的基本图(反相)Fig.8 Fundamental diagrams with anti-phase traffic light for Case 3

图9 ρ=0.05时的平均速度时间序列(反相)Fig.9 The time series of mean speed at ρ=0.05(anti-phase)
进一步的模拟结果表明,长、短两条路段的相对位置不同对于路段流量没有明显的影响.这是因为系统的流量是由瓶颈确定的,因此对于给定的路段长度集合,虽然可能有多种路段排列方式,但是只要研究一种即可.现实交通中司机可以通过选择不同的路径尽快到达目的地,因此在周期边界下多路段交通流的结论不能简单推广到交通网络的情形.
3 自组织交通灯策略
首先研究自组织交通灯策略下典型密度下路段的基本性质.图10为3种情形下流量随信号周期的变化曲线.由图10可见,虽然3种情况下路段分布明显不同,但是平均流量-信号周期曲线在定性上是一致的,定量差别并不明显,这说明自组织交通灯对于道路长度变化并不敏感,其中均匀路段并无明显的优势,在某些情况下流量甚至低于非均匀路段.与采用固定交通灯相比,在大多数参数下,采用自组织交通灯时所对应的流量明显增大,这表明自组织交通灯可以提高道路的通行效率.当然,这与采用自组织交通灯实际达到的绿信比有关(绿信比越大,流量也会相应增大),而在本工作中绿信比是不变的(λ=0.5).此外,由图10还可以观察到流量-信号周期曲线没有明显的周期振荡,显示出随机脉动的特征,这可能与交通灯的动态调整有关,此时道路系统难以达到固定信号配时下的稳态.
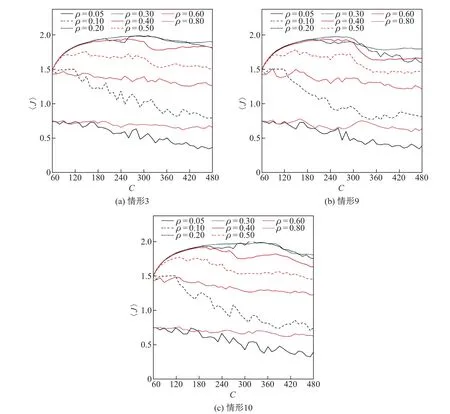
图10 3种情形下流量随信号周期的变化曲线Fig.10 Variation of flux with signal period for three cases with self-organizing traffic lights
由于低密度下道路的平均流量更大,可以推断此时所对应的流态可能是完全绿波状态,如ρ=0.10时的平均流量-信号周期曲线.有趣的是,在更低密度(ρ≤0.04)时,最大速度可能更低,这可能是因为车辆数较少时,车流状态受偶然因素影响较大.如采用固定配时的交通灯,则在很低的密度下将保持绿波状态.图11为自组织交通灯控制策略下3种情形时的基本图.可以看出,3种情况下的基本图类似,平台流量基本随着信号周期的增加而增大.对于均匀路段,当C=360时,流量要略低于非均匀路段.另外,由速度-密度曲线可以看出,当C=60时,会有一段高速运动区域,当C=120时,则分为不连续的两段区域,其中速度降低的原因尚待进一步探讨.
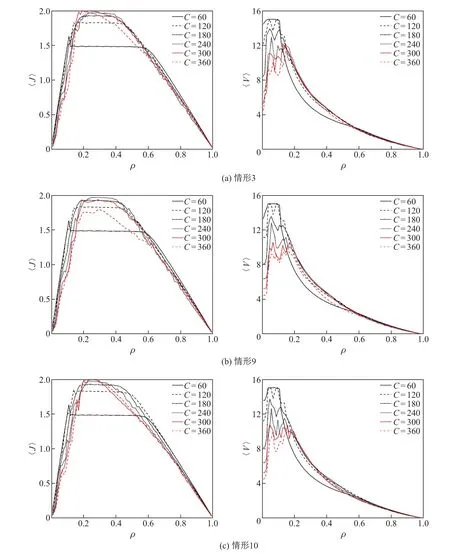
图11 自组织交通灯控制策略下的基本图Fig.11 Fundamental diagrams for three cases with self-organizing traffic lights
下面针对均匀路段(情形9),保持其他交通灯参数不变,研究改变最长红灯时间对基本图的影响.取而模拟结果如图12所示.
由图12可见:随着的增加,平台流量值不断减小,流量平台的密度范围相应增大;由于采用动态交通灯,在低密度范围,流密曲线和速密曲线变化不规则.从图12(b)可见:当时,出现车队以最大速度运动状态(即“完全绿波状态”)的密度范围最大;而当增大,即红灯持续的时间更久,则完全绿波状态的密度范围缩小,甚至不会出现.
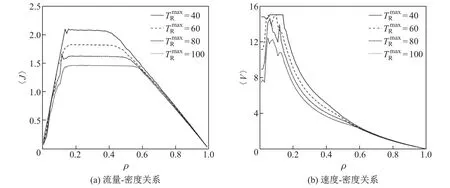
图12 C=120,=40,60,80,100的基本图(均匀路段)Fig.12 Fundamental diagrams with C=120,=40,60,80,100(Uniform sections)
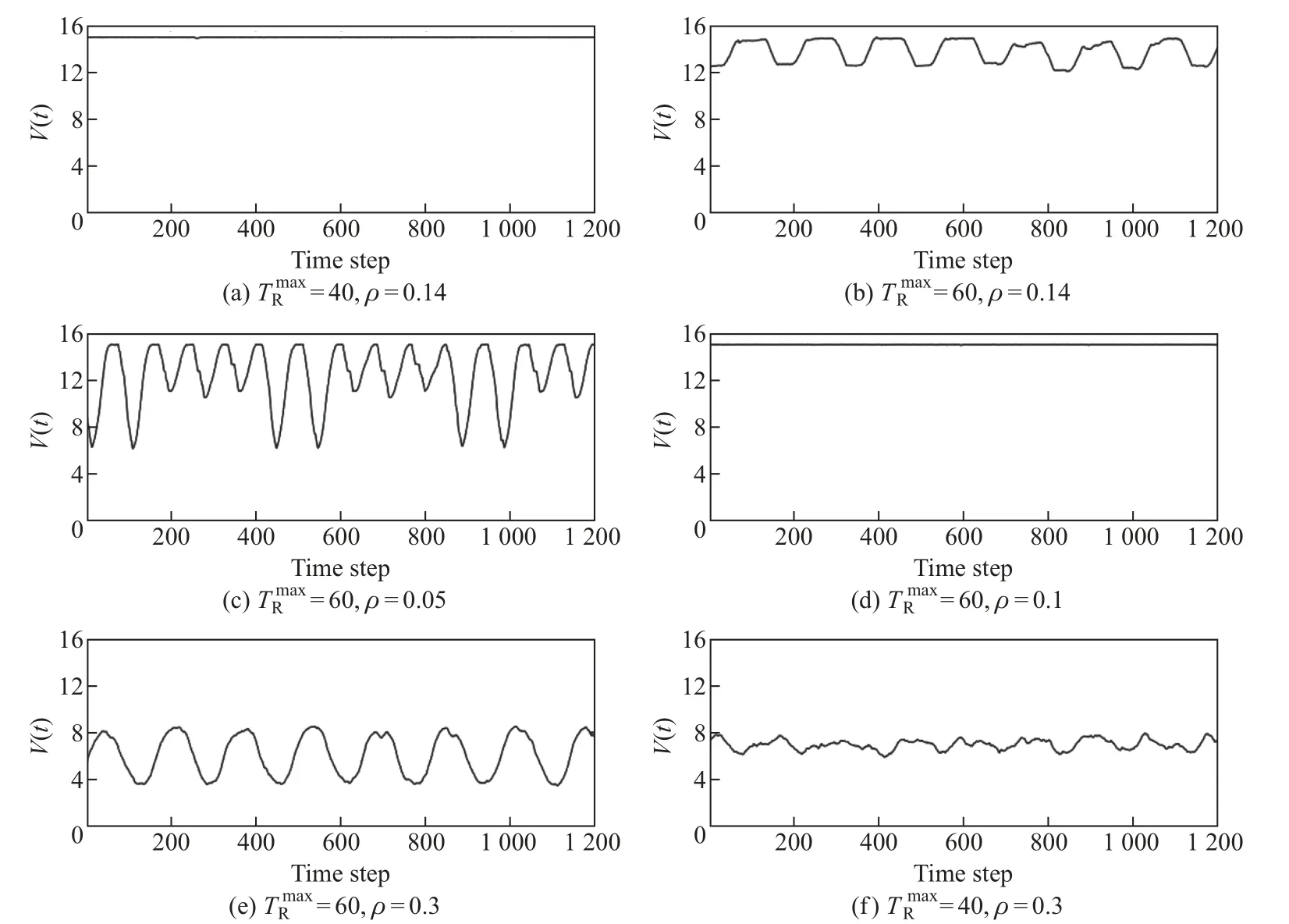
图13 典型参数下的平均速度时间序列Fig.13 The time series of means peed with typical parameters
4 结束语
本工作采用元胞自动机模型研究了地面多路段道路交通流的特征,重点关注非均匀路段的情形.所采用的交通灯控制策略包括同相、反相以及自组织策略等.为了细致刻画车辆速度的变化过程以及车辆在拥堵时仍保持一定间距等特征,采用了细化的VDR模型,其中p0=0.2,p1=0.02.这样对车辆从静止启动有明显影响,而对高速行驶车辆影响很小,更容易维持绿波状态.数值模拟结果显示,对于非均匀路段,当采用交通灯同相控制策略时,平均流量-信号周期曲线变化不明显;而采用反相控制策略时,则发生显著改变,尤其是在有很短路段的情况下.在这种情况下,难以出现完全绿波状态.采取自组织交通灯控制策略,可以达到更高的平台流量,在一定密度范围内也能再现完全绿波状态,且对于路段长度不敏感.采用自组织交通灯可以充分利用道路资源.
总体而言,由于地面路段交通流的研究中涉及较多参数,难以全面了解交通流的整体特性,在交通流的组织和优化方面有较大的难度,还需要进一步研究.
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
中国交通信息化(2022年5期)2022-07-23
东坡赤壁诗词(2019年5期)2019-11-14
计算机系统应用(2019年6期)2019-07-23
东坡赤壁诗词(2019年3期)2019-07-05
电子制作(2019年24期)2019-02-23
环球时报(2018-10-15)2018-10-15
儿童故事画报·发现号趣味百科(2017年9期)2018-03-13
汽车文摘(2014年2期)2014-12-14
中学生百科·小文艺(2009年8期)2009-11-24
