
Gaussian process regression model incorporated with tool wear mechanism
2022-11-13 07:30DehuaLIYingguangLIChangqingLIU
CHINESE JOURNAL OF AERONAUTICS 2022年10期
Dehua LI, Yingguang LI, Changqing LIU
National Key Laboratory of Science and Technology on Helicopter Transmission, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China
KEYWORDS Remaining useful life;Cutting condition;Tool wear;Wear mechanism;Gaussian process regression
Abstract Cutting tool condition directly affects machining quality and efficiency.In order to avoid severely worn tools used during machining process and fully release the remaining useful life in the meanwhile,a reliable evaluation method of remaining useful life of cutting tools is quite necessary.Due to the variation of cutting conditions,it is a challenge to predict remaining useful life of cutting tools by a unified model.In order to address this issue,this paper proposes a method for predicting the remaining useful life of cutting tools in variable cutting conditions based on Gaussian process regression model incorporated with tool wear mechanism, where the predicted value at adjacent moments is constrained to a linear relationship by the covariance matrix of Gaussian model based on the assumption of progressive tool wear process,so the wear process under continuous changing conditions can be modelled.In addition to that,the input feature space and the output of the model are also enhanced by considering the tool wear mechanism for improving prediction accuracy.Machining experiments are performed to verify the proposed method, and the results show that the proposed could improve the prediction of tool remaining useful life significantly.
1. Introduction
In the manufacturing of aerospace area, difficult-to-cut materials are widely used,where tool wear is much easier to happen and the cost of cutting tools is much higher. For example, to manufacture an airplane engine casing of 800 mm in diameter,about 400 cutting tools are required1. Cutting tool condition has a significant impact on part quality and machining efficiency. In order to ensure that cutting tools could keep good condition, cutting tools are always replaced with new ones without fully releasing the remaining useful life (RUL) due to the lack of reliable RUL evaluation methods.Frequent tool replacement will increase manufacturing cycle and costs. For precision machining, interrupting machining process and replacing tools during some key machining features will seriously damage the surface integrity of the parts.
Related studies have shown that only 50%-80%of the tool life is reasonably used2, where a reasonable tool replace time and strategy can effectively reduce downtime by 75%,increase production efficiency by 10%-60%3.The cutting tool has a significant impact on the total machining cost4, so full use of RUL of cutting tools can save a large number of cost.Increasing tool utilization can also help achieve green manufacturing,as tool production requires many types of rare metals5.Therefore, it is very necessary to predict RUL of cutting tools for sufficient use of cutting tools life. The estimation of RUL is not easy as the cutting conditions (CC) of each cutting tool is always continuously changing and the tool wear rate is not consistent during different wear stages. For a specific cutting tool,for the machining of a complex part,the machined geometry is always changing,so the cutting parameters such cutting speed and cutting depth are also changing accordingly. In addition to that,the rigidity of the part is also changing in different features,so the cutting parameters should also be changed so as to keep the machining stable. These changes make the estimation of RUL quite difficult.
Cutting tool condition has a great influence on part quality and machining efficiency, comprehensive research has been done on RUL prediction. These research methods can be divided into experience-based method, physics-based method,data-driven method and hybrid method. Experience-based method is modelled based on experts knowledge and engineering experience(such as if-then rules from domain experts)with the observed situation to infer RUL from historical measurement data. Zhou, et al.6proposed a method to calculate the stress distribution of the tool tip by using the finite element method, and finally obtained the best chamfering parameters,the influence of tool geometry on tool wear was studied. Denkena, et al.7obtained the useful life map of turning tools with different cutting edge microstructures in the experimental research. Since an experience-based method requires a great deal of expertise and experience with the same tool, it is difficult to establish an effective approach.
Physics-based modeling methods rely on an understanding of systems and degradation mechanisms. Cubillo, et al.8proposed a physics-based modeling method to represent metalmetal contact and fatigue of planetary transmission gears in aircraft systems. Physics-based method is modelled by establishing a mapping relationship between the impacting factors of RUL such as tools, parts materials, cutting conditions,and tool wear through a large amount of in-depth research on the machining process9. Because the process of tool failure is very complicated and involves many unexpected factors,the physical model establishment is always simplified,and the prediction accuracy of the model cannot be guaranteed.
Continued advancement of sensors has led to an everincreasing amount of data of various physical nature to be acquired from production lines10.Data-driven has been deemed as one of the most effective method for tool condition prediction, which is mainly realized based on the monitoring signals of machining process. Signals such as cutting force11, vibration12, spindle current and power, acoustic emission13can be used to reflect cutting tool condition.Machine learning methods including neural network14, hidden Markov chain, Bayesian network15, and Gaussian process regression16are always used to predict cutting tool condition.Huang,et al.17predicted tool wear by deep convolutional neural network based on multidomain feature fusion.Cai,et al.18extracted signal timing features through LSTM,and used nonlinear regression to predict tool wear by integrating timing features with machining information. Brito, et al.19used self-organizing mapping to predict tool wear under the condition of non-equilibrium data. Li,et al.20proposed a method using dynamic time windows to extract tool failure sensitive features from non-full life cycle data,and predicted the RUL of tools through deep bidirectional long short-term memory.Yang,et al.21directly inputs the vibration signals into double-CNN to predict the RUL of the tool.Traditional machine learning methods can be used to predict the RUL of the tool. Li and Liu22used the features extracted from the cutting force of the micro milling cutter,cutting conditions and features are input into the hidden Markov model to predict the tool wear,and then input the cutting conditions,features,cutting time,and tool wear into the multilayer perceptron to predict RUL. Some scholars used curve methods to predict RUL. Yang, et al.23extracted 5 features which are strongly related to tool wear in the force signals, and predicted the RUL of the tool through the prediction of trajectory similarity and differential evaluation of support vector regression to fit the tool wear curve. The problem with the prediction of the RUL based on data-driven method have two aspects: firstly,the generalization ability of the model is weak and the prediction accuracy is low under variable cutting conditions;secondly,the requirement of training data volume is relatively large if higher accuracy is expected.
Both of the data-driven methods and physics based methods have their own advantages, while also suffer from their own limitations. It is a good idea to incorporate them into one model so as to take both of their advantages.Chen,et al.24proposed a method by using the neural network to filter out the disturbance in the power signal,and took the power signal as input to establish a milling process model to predict machining error. Wang, et al.25fused the cutting force empirical formula with the Gate Recurrent Unit model, and added the rule that the tool wear would not decrease with the continuous processing into the loss function to predict the tool wear.Hanachi, et al.26extracted features from the spindle current signal, and fused the cutting empirical formula model with the fuzzy neural reasoning system to predict tool wear. Sun,et al.27proposed a method of data-driven fusion of physicalmodels, where tool wear is firstly predicted using a datadriven model, and a physical-model is established based on the Wiener process to predict the remaining useful life of the tool. These models have provided very valuable reference for remaining useful life prediction of cutting tool based on data-driven method incorporated with physics-based models,while it is still a challenge for the situation under continuous changing cutting conditions,it is not easy to describe the complex mechanisms. So further research is still required in order to address this issue.
In order to address the issue mentioned above, this paper proposes a method for predicting the remaining useful life of cutting tools in variable cutting conditions based on Gaussian process regression (GPR) model incorporated with tool wear mechanism, where the tool wear mechanism is incorporated in the input, the covariance matrix of Gaussian process, and the output of the model, the prediction accuracy is expected to be improved by the proposed method.
2. Overall approach
This paper proposes a method based on GPR model incorporated with tool wear mechanism, which lies in three aspects:firstly, the input feature space is enhanced by a dimensional of feature sequence numbers; secondly, the predicted value at adjacent moments is constrained to a linear relationship by the covariance matrix of Gaussian model based on the assumption of progressive tool wear process; thirdly, the output of the model is processed with a filter for more accurate results based on the correlation among remaining useful life of a series of adjacent samples.
There are many kinds of deterioration forms leading to tool failure,where flank wear is a very common form of tool failure.At the same time,the flank wear width is one of the important factors affecting the final residual stress distribution28, the depth of the hardened layer29, the plastic deformation and microstructure of the machined surface also change with the change of tool wear30, the quality of the machined surface is an important indicator that affects service performance. So the maximum width of the flank wear land (VB) was selected according to ISO standards, and the most worn cutting edge is selected to represent the overall condition of the tool. For the variation of cutting conditions,there are cutting condition changes more severe such as workpiece materials changes,while this paper will only address the situation of cutting parameter changes.
RUL will decrease correspondingly as VB increases during machining process.In this paper, GPR model are used to predict RUL, in the process of training the RUL prediction model, VB is used as an auxiliary label which can effectively improve model accuracy. The diagram of the proposed method is shown in Fig. 1(SCP: Spindle Current and Power;FE: Features Extraction; DFVA: Double Factor Variance Analysis).
3. RUL prediction model incorporated with tool failure mechanism
The tool failure mechanism in this paper includes two parts:i)Gaussian process regression model incorporated with tool failure mechanism;ii)Input feature space construction and output processing.
3.1. Gaussian process regression model incorporated with tool failure mechanism
GPR model focuses on the correlation between different input data,and it is shown in Eq.(1).x is the d-dimensional features vector extracted from the monitoring signals,and GPR covariance function can learn the correlation among input data.In the covariance function, the kernel function is used to measure the correlation between different samples, as shown in Eq. (2), where θ = (γ, ω1, ω2,...,ωd), θ is the hyperparameter of the variance function k, and the radial basis kernel function is selected as kernel function as it has excellent nonlinear ability and infinitely differentiable characteristics.There are many interference factors during the machining process,and the acquired signals contain noise, and the effect of noise cannot be completely eliminated after signal preprocessing.Therefore, it is necessary to measure the strength of the data noise, and this paper uses the WhiteKernel function to measure the noise level of the input data.
When there is no break occurs during machining process,the relationship between signals at adjacent moments can be deemed as linear31, so Eq. (3) can be simplified to Eq. (4).
As shown in Eq. (5), the covariance matrix GPR can constrain the predicted values of adjacent moments into linear relationships. Although the rate of change of RUL during the whole life cycle is not constant, but the RUL at adjacent moments can be approximated as a linear relationship. Therefore, the RUL at adjacent moments can meet Eq. (5).
Because RUL and VB have a certain correlation,so VB can be used as an auxiliary label to predict RUL.
3.2. Input feature space construction and output processing
The RUL decreases with the increase of tool wear during machining process, where the signals such as cutting force,workpiece vibration, spindle current and power will change accordingly. Therefore, this paper predicts RUL from these signals. Because the monitoring signal has the characteristics of large amount of data and low information density. In this paper, empirical mode decomposition, Fourier transform and wavelet packet decomposition are used to extract the time domain, frequency domain and time-frequency domain information to improve the data information density32.
The monitoring signals obtained in the NC machining process are affected by both cutting conditions and tool wear. In order to predict the RUL under variable cutting conditions, it is necessary to filter out the features of strong correlation with tool wear while of weak correlation with cutting conditions.
Analysis of variance (ANOVA) is used to test the significance of differences between two or more sample means.Due to the influence of various factors,the collected data show fluctuation. The reasons for fluctuations can be divided into two categories: one is uncontrollable random factors, and the other is controllable factors exerted on the results.ANOVA studies which control variables have a significant effect on the observed variables by means of the variance of the observed variables. In this paper, the extracted features with tool wear and cutting conditions were analyzed by double factor variance analysis to select the appropriate features.
During the machining, the RUL decreases with the monotonous increase of VB,while the sequence number of monitoring signal features increases monotonously (Fig. 2). The sequence number represents the mechanism by which tool failure will become more serious as the cutting progresses,and the variance analysis of sequence number is shown in Table 1.
Table 1 shows that the F value of the cutting conditions in this feature is 0.12 lower than the F threshold 4.54, the tool wear F value of 27.73 is significantly greater than the tool wear threshold 4.11, and the corresponding P value of VB is 3 × 10-3much less than 0.1. Therefore, the sequence number has a strong correlation with tool wear, which is a very ideal feature.In order to ensure the accuracy and efficiency of model learning,this feature needs to be operated similarly to normalization. This paper divides the sequence number of the processed monitoring signals feature by 100.
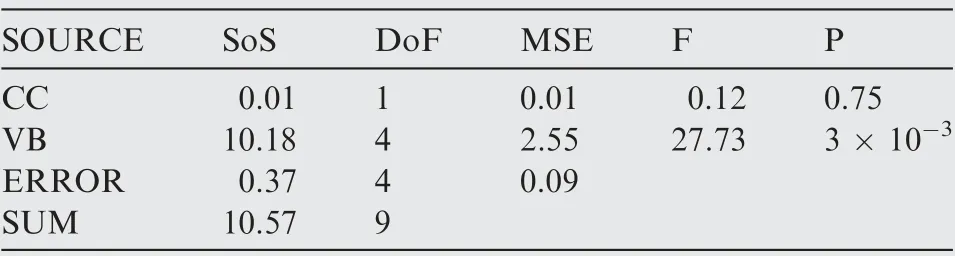
Table 1 Sequence number analysis of variance.
It should be noted that the current RUL is correlated with the RUL of the previous period. Therefore, it is an effective means to improve the prediction accuracy by considering the correlation of data at different times, and a filtering method are used, so the output of the model can be smoothed, and abnormal results can be restrained.In this paper,the predicted values of several moments are respectively multiplied by the corresponding weights and added together as the RUL at the current time, as shown in Eq. (6).
As the cutting process progresses, the value of previous moments has a weaker influence on the current moment, so the corresponding weight in Eq. (6) is reduced as time past.
4. Case study and comparison
This paper first extracts the features of strong correlation with tool wear and weak correlation with cutting conditions, and then incorporates the tool wear mechanism. GPR can effectively learn the correlation among data, it can predict the RUL of the tool under variable cutting conditions.Finally,filtering can effectively improve the prediction accuracy. VB as an auxiliary label can improve prediction accuracy. In order to verify the feasibility and effectiveness of the proposed method, two new different cutting conditions are tested with the model trained on two other cutting conditions, and the proposed model is also compared with other methods.Finally,the PHM2010 data was used to verify the effectiveness of the model, for details of PHM2010 please see the website(https://www.phmsociety.org/competition/phm/10).
4.1. Data collection
In this paper, 4 sets of experiments with different cutting parameters were carried out based on a DMGTM80P DuoBlack milling center,and four solid carbide endmill with diameter of 12 mm and 4 teeth are used for the experiment.The workpiece material is titanium alloy, the machining feature is pocket,
where cutting modes of full cutting,partial cutting,linear tool path, arc tool path are involved, the cutting conditions are changing during the machining process under given nominal cutting parameters. In this paper, three different types of feed per tooth, spindle speed, and axial depth of cut are randomly combined,and four sets of machining parameters are designed,as shown in Table 2.Among them,the cutting force signals are obtained by the SpikeTMsensory tool holder with a sampling frequency of 600 Hz; the vibration signals are obtained by a unidirectional acceleration sensor KSITM-108 M500 with a sampling frequency of 400 Hz; the spindle power and current signals are collected by the OPCUA of the SiemensTMNC system with a sampling frequency of 300 Hz, and the sampling frequency is enough to ensure RUL prediction.
Tool wear inspection is performed in the machining intervals using a wireless industrial microscope (SinicoTMXKT600,calibration accuracy:0.01 mm),as shown in Fig.3,when VB reaches 0.3 mm the tool is scrapped.These data have been uploaded in (http://www.doi.org/10.21227/3aa1-5e83), where CC1, CC2, CC3and CC4correspond to the data under W7,W9, W6and W5cutting conditions respectively.
4.2. Processing of input data and output results
In this paper, 132 features of monitoring signals from time domain, frequency domain and time-frequency domain are extracted by means of empirical model decomposition,Fourier transform and wavelet packet decomposition, and double factor analysis variance was used to filtered the features of strong correlation with tool wear.
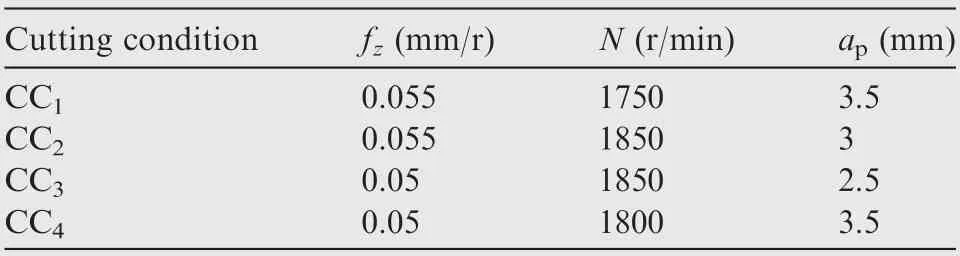
Table 2 Cutting parameters of cutting experiment.
Based on the central limit theorem,it can be known that the mean value of a large amount of independent and identically distributed random variables will converge to the Gaussian distribution according to the distribution after proper standardization. The above properties meet the requirements of the analysis of variance for the data to obey the Gaussian distribution, so we can do analysis of variance on the data.
This paper selects the features corresponding to the VB of 0, 0.06 mm in the initial wear stage, and the features corresponding to the VB of 0.12,0.18 mm and 0.24 mm in the normal wear stage, so the VB values have 5 levels. And the features are from the data of two cutting conditions,therefore the cutting condition is a 2-level factor.The specific details are shown in Table 3.
When the P value in the output result is lower than 0.1 and F is higher than the corresponding F distribution threshold, it is considered that this feature is correlated with this factor at the 90% confidence level. In this paper, the F value and P value obtained by the analysis of variance on the extracted 132 features are shown in Fig. 4 and Fig. 5(CC-F: Cutting Conditions F Value;VB-F:Tool Wear F Value;VB-hold:Tool Wear F Distribution Threshold. CC-P: Cutting Condition P Value; VB-P: Tool Wear P Value; 90%CI: 90% Confidence Interval.). After analyzing the F value and P value, a total number of 14 suitable features have been selected. Therefore,the input features in this paper include the 14 dimensions of signal features and 1 dimension of the sequence number.
After a series of analysis of the data,the output of every five moments are dealt with together, respectively multiplies the corresponding weights on the 5 adjacent predicted values and adds them together as the output value RUL(t)′at the current moment, as shown in Eq. (7).
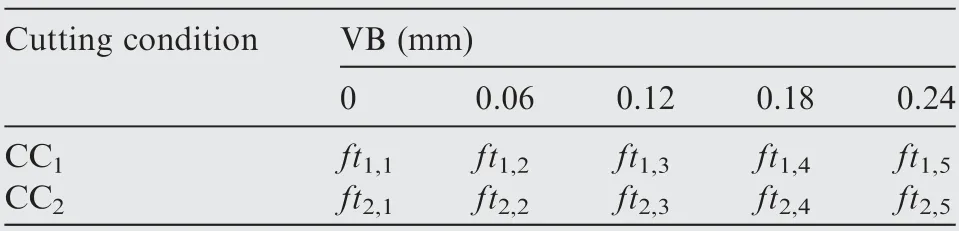
Table 3 Analysis of variance setting table.
Note in Eq.(7):the weight coefficients are a1:0.05,a2:0.05,a3: 0.1, a4: 0.3, a5: 0.5, the above weight coefficients are the super parameters of the model and obtained by manual parameter adjustment.
4.3. Test result analysis
The data of the cutting conditions CC1and CC2are used to train the model, with iterations of 3000 steps in the training process, and there is no need to adjust the model during the testing process, all parameters of this model do not need to be updated during the monitoring process, data from CC3and CC4cutting condition were used to test the model.
The RUL test results are shown in Fig.6 under cutting condition CC3,the maximum absolute error(ME)is 2.79 minutes,accounting for 12.38% of the overall life, and the mean absolute error(MAE)is 0.68 minutes,accounting for 3.02%of the overall life. PV: Predictive Value; AV: Actual Value; AE:Absolute Error. The 90% confidence interval boundary(CIB) of the prediction error under this cutting condition is 1.68 minutes, accounting for 7.45% of the overall life.
The RUL test results are shown in Fig.7 under cutting condition CC4, the ME is 3.6 minutes, accounting for 15.97% of the overall life, and the MAE is 1.02 minutes, accounting for 4.52% of the overall life. The 90%CIB of the prediction error under this cutting condition is 2.24 minutes, accounting for 9.94% of the overall life.
The test results of this method under CC3and CC4cutting conditions are analyzed,the prediction accuracy and robust of this method are very high, and it can effectively predict RUL.
4.4. Models comparison
The method GPRM proposed in this paper is compared with GPR, MAML and LSTM on the data obtained in our experiments. Among them, GPR is a random process, here the model structure is the same as GPRM,but the tool wear mechanism is not incorporated;MAML is meta-learning method,it is trained based on the data of CC1and CC2, the base model has two layers with 45 cells in each layer, and 1.5 × 104iterations are used during the training process.During the test,data of 15 sampling points were selected from the CC3and CC4data sets respectively to fine-tune the meta-model; and LSTM is a deep learning method, the model has two layers with 45 cells in each layer, and 1 × 105iterations are used during the training process.
This paper also compared the method for evaluating tool life with the tool wear Empirical Formula(EF)26,which is also based on the data fitting under CC1and CC2cutting conditions. The formula is shown in Eq. (8), the time when VB reaches 0.3 mm is the tool life,and the tool life minus the used time is RUL.
The RUL prediction error analysis results of the four methods are shown in Table 4. It can be found that the GPR integrated with tool wear mechanism has advantages compared with the other methods both on the maximum error,90%confidence interval boundary and average error (Fig. 8). Therefore, the method in this paper is more suitable for predicting RUL in the process of variable cutting conditions.
4.5. Model test on PHM2010 data
This model is also verified with PHM2010 data, there is no change in the cutting conditions of the data set, a 6 mm ball nose tungsten carbide cutter is used to cut the sidewall on the aluminum alloy blank,the tool path is straight.This model is based on the cutting data training model of two tools(c1 and c6), and the data of one tool (c4) verifies the validity of the model. After studying the data,this part uses 0.17 mm of tool wear as the tool scrap standard.

Table 4 Analysis table of several methods RUL prediction error.
Since the time information of the monitoring signal is not obtained, and the cutting conditions have not changed during the machining process,the cutting time of each segment of the tool path is the same. This paper regards each segment of the tool path as the basic unit of tool life.
Fig. 9 shows the test results under the PHM data of this model. In the test data set, after cutting 286 segments of tool path,the tool wear reached 0.17 mm,therefore,the unit of tool life in this part is each tool path. The ME accounting for 15.6% of the overall life, and the MAE accounting for 6.6%of the overall life. The 90%CIB of the prediction error under this cutting condition is 33,accounting for 11.54%of the overall life.
5. Conclusions
This paper GPR is used as the base model to integrate the tool wear mechanism to predict the RUL of the tool.In the course of our data set testing,the maximum absolute error is no more than 16%of the overall life,and the mean absolute error is no more than 5%of the overall life.Because of the high accuracy and strong robustness, this method has a certain industrial application prospect. Although this method can accurately predict RUL under complex cutting conditions based on a small number of samples, there are still some areas for improvement in this method.We will further improve the prediction accuracy of the model and try to predict RUL under more failure modes in addition to VB.This method is currently used in the case of simple machining features and small changes of cutting parameters, the scope of application of the model will be extended in the future.
Declaration of Competing Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Acknowledgements
This work is supported by the National Natural Science Foundation Project of China (Nos. 51925505, 51921003).
 CHINESE JOURNAL OF AERONAUTICS2022年10期
CHINESE JOURNAL OF AERONAUTICS2022年10期
- CHINESE JOURNAL OF AERONAUTICS的其它文章
- Full mode flight dynamics modelling and control of stopped-rotor UAV
- Effect of baffle injectors on the first-order tangential acoustic mode in a cylindrical combustor
- Experimental study of hysteresis and catastrophe in a cavity-based scramjet combustor
- Flow control of double bypass variable cycle engine in modal transition
- Effects of chemical energy accommodation on nonequilibrium flow and heat transfer to a catalytic wall
- A reduced order model for coupled mode cascade flutter analysis