
Full mode flight dynamics modelling and control of stopped-rotor UAV
2022-11-13 07:28AoHEHonggngGAOShnshnZHANGZhenghongGAOBodiMALuluCHENWeiDAI
CHINESE JOURNAL OF AERONAUTICS 2022年10期
Ao HE, Honggng GAO, Shnshn ZHANG, Zhenghong GAO, Bodi MA,Lulu CHEN, Wei DAI
a School of Aeronautics, Northwestern Polytechnical University, Xi’an 710072, China
b School of Civil Aviation, Northwestern Polytechnical University, Xi’an 710072, China
KEYWORDS Full-mode control;High-speed helicopter;Model building;Stopped-rotor aircraft;Variable parameter stabilization
Abstract The Stopped-Rotor(SR)UAV combines the advantages of vertical take-off and landing of helicopter and high-speed cruise of fixed-wing aircraft. At the same time, it also has a unique aerodynamic layout,which leads to great differences in the control and aerodynamic characteristics of various flight modes,and brings great challenges to the flight dynamics modelling and control in full-mode flight. In this paper, the flight dynamics modelling and control method of SR UAV in full-mode flight is studied. First, based on the typical flight profile of SR UAV when performing missions, using the theory and method of fuzzy mathematics, the T-S flight dynamics model of SR UAV in full-mode flight is established by synthesizing the flight dynamics model of each flight mode.Then,an explicit model tracking and parameter adjusting control system based on fuzzy theory is designed to enhance the stability of the inner loop of SR UAV in full-mode flight,which effectively reduces the coupling between axes and improves the control quality of the system.Finally,the outer loop control system is designed by using classical control method,and the control law of SR UAV in full-mode automatic flight is obtained.The simulation results show that the proposed control system design method is feasible and effective,which lays a solid foundation for the subsequent engineering implementation of the SR UAV.
1. Introduction
For a long time,many aircraft researchers have been exploring a high-speed helicopter that can combine the advantages of helicopter vertical take-off and landing and high-speed cruise of fixed-wing aircraft. At present, the tilt-rotor aircraft1-4,compound lift aircraft5,6rotor/wing conversion type7and other configuration aircraft have been developed. The Stopped-Rotor (SR) aircraft (as shown in Fig. 1 and Fig. 2)is a new type of rotor/wing conversion high-speed helicopter.Its biggest feature is that it not only has a pair of high-speed rotation rotor, but also can be locked as a fixed wing. SR aircraft has very broad application prospects in the field of military and civil aviation.
SR UAV has three flight modes:helicopter vertical take-off and landing flight mode, fixed-wing high-speed cruise mode,and transitional flight mode that converts between helicopter and fixed-wing aircraft.Since the design of SR UAV takes into account the performance of helicopter and fixed-wing flight,its aerodynamic layout is different from that of conventional helicopter and fixed-wing aircraft(as shown in Fig.3),resulting in its special flight dynamics characteristics in various flight modes, which brings great difficulties to the unified modelling of full-mode flight.In addition,how the helicopter control system and the fixed-wing control system can smoothly switch and work together in full-mode flight is also a major problem that needs to be solved in the control system design.In order to realize the engineering application of SR UAV, it is necessary to study the flight dynamics modelling and control system design during full-mode flight. This paper intends to study the design method of unified flight dynamics modelling and automatic flight control system of SR UAV in full-mode flight.
At present, the research on SR aircraft mainly includes the X-50A‘‘Dragonfly”8,9of the United States(as shown in Fig.1)and the ‘‘Linglong” aircraft of Northwestern Polytechnical University in China (as shown in Fig. 2). The X-50A conducted its first hovering flight test under the remote control of the pilot in the ground cockpit in December 2003,but there were successive crashes during subsequent test flights, and the project was terminated. The ‘‘Linglong” of Northwestern Polytechnical University successfully achieved vertical takeoff in helicopter mode, converted to fixed-wing mode for cruise, and finally converted to vertical landing again in helicopter mode under the cooperation of two people in the 2011 International UAV Competition.
There are not too many specific technical researches on SR UAVs, and they mainly come from the United States and China. The United States is mainly concentrated around 2000,and China has mainly made a series of key technological breakthroughs in the past ten years.Specifically:Sun et al.10,11studied the aerodynamic characteristics of the elliptical symmetric rotor,Bass8used wind tunnel tests to study the aerodynamic characteristics of the SR UAV rotor mode and fixedwing mode, Crossley and Bass12combined the aerodynamic analysis program and the structural design program to improve the accuracy of the blade structure design, Deng13and He14et al. studied the aerodynamic interference between the rotor and the wing, and Aftosmism15studied the aerodynamic load of SR UAV through inviscid numerical simulation,and then understood the flight characteristics of SR UAV in the process of transition from rotor mode to fixed-wing mode.Changduk and Jongha16studied the transient performance of SR UAV propulsion system in the process of flight mode transition. Shi and Gao17studied the unloading characteristics of the rotor during the transition,and Li et al.18studied the aerodynamic characteristics at the end of conversion. Gao7,19-21studied the dynamic characteristics of SR UAV in transition mode, hovering mode, helicopter mode in low-speed forward flight, and fixed-wing mode. In addition, for the design of the control system, Huang et al.22designed the control law of SR UAV transition flight based on the classical control theory.
It can be seen from the research above that there is no fullmode automatic flight control study for UAV.Only the classic control method is used to design the control system of single flight mode. This kind of control system lacks robustness and channel decoupling function, so it is difficult to obtain good control performance.Due to the flutter of the main rotor and the aerodynamic interference among the components, the control channels of SR UAV in helicopter mode and transition mode are coupled, which makes it difficult to control the aircraft.Therefore,it is necessary to design a control system with decoupling function. The explicit model tracking control system can explicitly design the dynamic characteristics of the object in the explicit model,and the feedback tracking control system has certain robustness, simple control structure and channel decoupling function, which is very suitable for the flight of SR UAV in helicopter mode and transition mode.
In this paper, the full-mode flight dynamics modelling and control method of SR UAV is studied. Firstly, based on the typical flight profile of SR UAV, the appropriate universe and reasonable membership function are selected to synthesize the helicopter mode flight dynamics model,7transition mode flight dynamics model19and fixed-wing mode flight dynamics model21established in the author’s previous researches, which are through comprehensive application of flight identification,mechanism analysis, CFD calculation, wind tunnel test, etc.,and the T-S flight dynamics model of SR UAV in full-mode flight is established. Then, an explicit model tracking parameter adjusting control system based on fuzzy theory23is proposed, which can effectively reduce the coupling between axes and improve the control quality. Finally, the outer loop control system is designed by using the classical control method, and the control law of SR UAV full-mode automatic flight is designed and verified by simulation.
2. Full-mode flight dynamics modelling
The flight dynamics models of SR UAV in helicopter mode,transition mode and fixed-wing mode have been established by using mechanism modelling, CFD calculation, wind tunnel test and engineering estimation in the author’s previous researches. The model structure is shown below:
where m is the aircraft mass,u,v, and w are the components of the flight velocity on thex,y, and z axes of the body axis system,q,p,and r are the pitch rate,roll rate,and yaw rate,respectively,Ix,Iy,and Izare the moments of inertia,Ixzis the product of inertia,Fx,Fy,and Fzare the resultant forces on thex,y,and z axes, respectively, andMx,My, and Mzare the resultant moments of the x, y, and z axes, respectively.Fx,Fy, FzandMx,My, Mzin helicopter mode, transition mode and fixed-wing mode have been solved in Refs. 19,21, respectively,which will not be repeated here.
2.1. Full-mode mission profile design
The advantage of the SR UAV is that it can cruise at high speed and has vertical take-off and landing functions. The complete flight process of SR UAV is usually shown in Fig.4.
Fig. 4 includes vertical take-off and landing in helicopter mode, cruise in fixed-wing mode, and transition modes for mutual conversion between helicopter mode and fixed-wing mode.The functions of each flight mode are shown in Table 1.
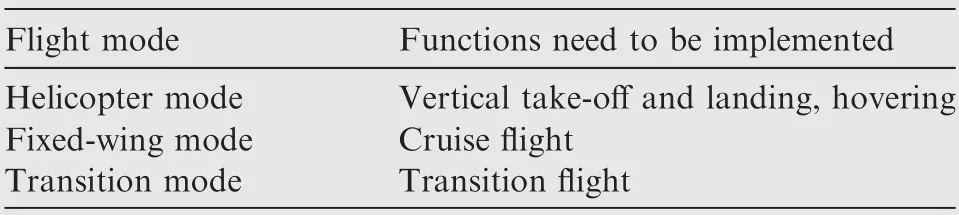
Table 1 Functions of each flight mode of SR UAV.
The flight process of SR UAV is as follows:take off in helicopter mode and hover at a constant altitude, then start the propeller on nose to start the transition mode. With the increase of flight speed, the lift provided by canard wing and horizontal tail gradually increases,and the pull force provided by the main rotor gradually decreases.During the whole transition process,the main rotor almost keeps at a constant working speed, and the pull force is adjusted by changing the collective pitch. Only when the lift generated by canard wing and horizontal tail is enough to balance the gravity of the whole aircraft and the pull of main rotor is close to zero, the rotor will be decelerated and locked.And the SR UAV is converted to fixed-wing mode.
Firstly, the nonlinear flight dynamics model of each flight mode is linearized with small disturbance, and the state space model of each flight mode with multiple trim points is obtained. Then the theory and method of fuzzy mathematics are used to synthesize the state space model of multiple state points. The unified flight dynamics model of full-mode flight is obtained.
2.2. Model linearization of each flight mode
Selection of trim state points when linearizing with small disturbances: the hovering state point is used when linearizing in helicopter mode; when linearizing in fixed-wing mode, the state point of straight and level flight is used; when flying in transition mode, the aerodynamic characteristics change greatly and multiple trim status points are selected for linearizing in the entire transition process.We suppose that the linear model of SR UAV at the i th trim point is written as.
whereAi,Bi,and Ciare the aerodynamic derivative matrix,control derivative matrix and output matrix of the linearized model at the i th trim point, respectively.xi=[u v w p q r φ ϑ ψ]T,andui=[δcolδrollδpitchδyawδthrottle]T.
Since SR UAV has many flight modes and different flight modes have different control inputs. The control inputs are defined uniformly as: roll control inputδroll, pitch control inputδpitch, yaw control inputδyaw, collective pitch control inputδcol, and the forward propeller pitch control inputδthrottle.
When the helicopter mode is linearized, the control inputsδroll,δpitch,δyaw,and δcolrefer to lateral cyclic pitch,longitudinal cyclic pitch, tail rotor pitch, and collective pitch,respectively. The column about δthrottlein manipulation matrix Bican be taken as 0. When the fixed-wing mode is linearized,the control inputsδroll,δpitch,δyaw, and δthrottlerefer to aileron,elevator, rudder, and forward propeller pitch, respectively.The column about δcolin manipulation matrix Bican be taken as 0. In transition flight mode, two sets of control systems work at the same time.In order to unify with the linear model form of helicopter mode and fixed-wing mode, the control model is added to the flight dynamics model when the transition mode is linearized, as shown in Fig. 5. For the control model results, one can refer to Ref. 19.
2.3. Model synthesis
The fuzzy theory is used to synthesize the linear models at multiple trim points of each flight mode of the SR UAV, so that the models before and after the synthesis can have consistent control characteristics. The main content of model synthesis includes:the selection of model domain,the selection of membership function, and the solution of the comprehensive model.
(1) Selection of model domain.
The model universe is used to determine the range of input variables.The full flight process of the SR UAV can be divided into three parts according to the forward flight speed.The division of each part and the corresponding applicable model are shown in Table 2. Therefore, the forward speed is selected as the model domain. In Table 2, Vcis the speed at the end of the transitional flight of the SR UAV.
(2) Selection of membership function.
The distribution of the membership function in the universe of discourse should be reasonable, and the membership functions of the two linearized models that are separated should not intersect, that is, the linear model at a certain speed point in the universe is only related to the linear model at two adjacent trim points, but not to the spaced linear model, which is also reasonable in flight dynamics analysis.
In order to ensure that the membership function has good sensitivity, the following triangular membership function is selected:
The membership function of model subset 1 is expressed as.
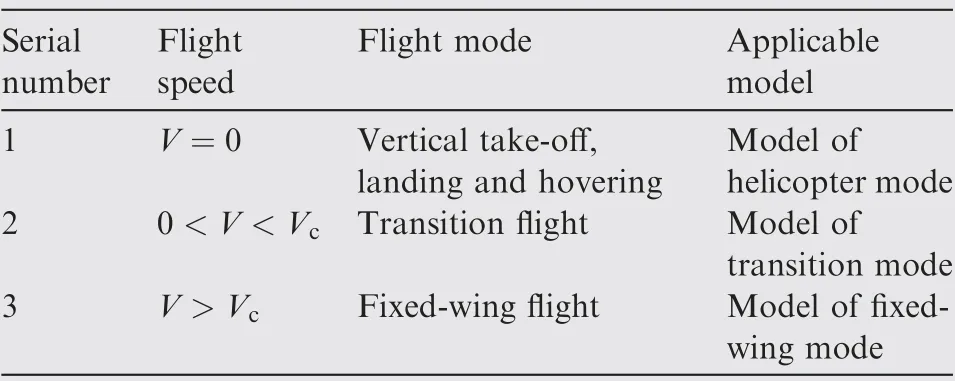
Table 2 Division of SR UAV flight process.
The membership functions of other model subsets are the same asF2(V ),so that the membership function curve distribution diagram in the universe as shown in Fig. 6 can be obtained.
(3) Solving the comprehensive model.
After the integration of the above-mentioned membership functions, the system model can be expressed as.
where n is the number of model subsets.
3. Design of stability augmentation control system
Explicit model tracking is to design the ideal model explicitly in the control system, and use feedback control to make the aircraft state follow the output state of the explicit model.Because the parameters of the aircraft model are changing during the transition of the SR UAV, it is difficult to use a fixed set of control parameters to control the entire transition process well.Based on the theory of fuzzy mathematics,the paper proposes an explicit model tracking and parameter adjustment control system.The inner loop of the transition process is controlled by variable parameters, so that the entire transition process has good dynamic tracking characteristics and steady-state performance.
The explicit model tracking tuning control system designed in this paper is shown in Fig.7.In Fig.7,the control index of the aircraft is embodied by the explicit model. The input ΔW of the explicit model is the steering stick control command,and the output Δxmis the expected response. The difference between the response of the explicit model Δxmand the actual response of the aircraft Δx1is to obtain the error signale1.After the error signal passes through the control matrixG1,the input signal Δu of the actuator is formed through the proportional integral module. The purpose of introducing the integral module is to suppress the steady-state error and keep the aircraft in automatic trim.
We select multiple state points, and design the explicit model tracking control system for the linear model under each state point to obtain multiple sets of values of the control matricesG1,G2, andR. According to the principle of parallel distributed compensation24, the control parametersG1,G2,and R in Fig. 7 can be obtained as.
(1) Explicit model.
The explicit model is the instruction model of the control system, the model to be tracked, and the design goal to be achieved by the control system. The explicit model is designed according to the characteristics of the controlled object and the performance index requirements to be achieved,and is usually designed as a first-order or second-order system.Generally,the explicit model is designed based on the existing aircraft of the same type and level that can achieve satisfactory performance as a control index. The explicit models of pitch channel, roll channel, yaw channel, and height channel designed in the paper are as follows:
Pitch channel:
The design value of each parameter in Eqs.(1)-(4)is shown in Table 3.
In Table 3, the physical meaning of the sensitivity coefficient Ciiis the steady-state response generated by the unit control input,so the unit of the sensitivity coefficient of the pitch,roll, and yaw channels is (°/s)/(°), that is, the angular velocity generated by the unit control surface. The unit of the sensitivity coefficient of the height channel is (m/s)/(°), which represents the magnitude of the vertical speed response generated by the unit collective pitch.Combining the extensive flight test experience of the SR UAV, when the control input of each channel is 1°, the response of the pitch, roll, yaw, and height channels are set to -4(°)/s, -5(°)/s, -3(°)/s, and -1 m/s,respectively. The sensitivity coefficient Ciiof each channel is shown in Table 3.
The damping coefficient ζ is directly selected as the ideal damping ratio of the second-order system of 0.707, and the bandwidth of the model is obtained by analyzing the flight dynamics characteristics of the SR UAV in Ref. 7. The selection of the time constant Tm4of the height channel refers to the result of flight identification in Ref. 20. The identification result of the vertical derivative Zwin Ref. 20 is -0.59, that is, the time constant of the system is about 1/0.59 = 1.69,the explicit model is used as the design index,and the time constant Tm4=0.5 is selected.
(2) Control matrix design.
When designing the full-mode explicit model tracking control system of the SR UAV, it is necessary to select multiple state points to design the tracking control parameters separately, and then synthesize the control parameters to obtain the parameter tuning tracking control system. Here, taking the forward speed V=40 km/h state point in the transition process as an example,the design process of the control matrix G1will be explained, and the design process of other state points will not be repeated here.
The control matrix B under the state point of forward flight speed V=40 km/h in the transition process is:

Table 3 Design parameters of each channel explicit model.
According to the design method in Ref. 25, the control matrix G1can be obtained as follows:
(3) Selection of other parameters.
The parameters of R and G2are adjusted according to the tracking effect of the explicit model during simulation. It is determined that the R matrix and G2matrix under the state of V=40 km/h are as follows:
We repeat the above process for the linear models under all the selected state points to design multiple R,G1, and G2, and substitute them into Eq.(4)to obtain the explicit model tracking tuning control parameters.
4. Design of outer loop control system and full-mode flight command
After the design of the explicit model tracking control system in the previous section, each flight mode of the SR UAV has good maneuvering characteristics. In order to facilitate the realization of the subsequent engineering flight test, this section designs the automatic flight control system of each flight mode of the SR UAV based on the classic control theory.Due to the different functions and available control inputs of each flight mode, the control law and command of each flight mode are designed respectively. The overall control structure of SR UAV in full-mode flight is shown in Fig. 8.
The control system and instruction model will be designed for each stage of the typical full-mode flight process shown in Fig. 4.
4.1. Design of automatic flight control law in helicopter mode
It can be seen from Table 2 that the helicopter mode needs to achieve vertical take-off, landing and hovering functions.Therefore, for the longitudinal channel, lateral channel, heading channel and vertical channel, the outer loop control systems of longitudinal position keeping, lateral position keeping, yaw angle keeping and altitude control system are designed respectively to ensure that the horizontal displacement and yaw angle do not change when the altitude changes in the process of vertical take-off and landing.The control law is designed as follows:
Regardless of the impact of ground effect, by only designing the instructions ofHcmd,Ycmd,Xcmd, andψcmd, the vertical take-off and landing of SR UAV in helicopter mode can be achieved.
4.2. Design of automatic flight control law in transition mode
Based on the transition scheme designed in Ref.19,that is,the whole transition process of SR UAV flying at constant altitude and straight line,the angle of attack of the aircraft is zero,and the automatic flight control law of transition mode is designed.The outer loop of the longitudinal channel is pitch angle control to ensure that the pitch angle keeps at the set value during the transition.The position keeping control law is designed for the lateral channel to ensure that there is no lateral displacement during the transition. A height control law is designed for the vertical channel to control the height in the transition process. The yaw angle control is used in the heading channel to ensure that the heading angle keeps at the set value.A speed control law is designed for the throttle channel of forward pull propeller to control the change of forward flight speed in the transition process. The specific control law is designed as follows:
where Vcmdis the forward speed command during transition;KVand KiVare the proportional and integral coefficients of speed control. Regardless of the influence of wind, the pitch angle and the angle of attack are equal when flying in a straight line at a fixed altitude,so the pitch angle control system is used to realize the control of the angle of attack during transition.
We only need to designHcmd,Ycmd,ϑcmd,ψcmd, and Vcmdto realize the conversion between helicopter mode and fixed wing mode.
4.3. Design of automatic flight control law in fixed-wing mode
The outer loop control law of the fixed-wing mode flight is relatively mature. In order to simulate the full-mode flight process, only the control law of the fixed-wing mode straight and level flight is designed in the paper, and the speed maintaining control system and altitude maintaining are designed.The specific control law is designed as follows:
where Kwis the control parameter of vertical speed.When flying in fixed-wing mode, only the corresponding control commands need to be designed.
4.4. Full-mode flight command design
According to the typical flight process of the SR UAV shown in Fig.4,the full-mode flight process is divided into five modes for instruction design.
(1) Vertical take-off in helicopter mode.
When taking off, the helicopter takes off vertically according to the rising speed of 5 m/s,and the displacement and azimuth of the aircraft in the horizontal plane are kept constant.Based on the helicopter mode automatic flight control law designed in Section 4.1,the following commands of each channel are designed:
where HR is the preset altitude,t is the time,and the aircraft is set to rise at a speed of 5 m/s. During vertical take-off, we apply the above instructions in the ground standby state to achieve vertical take-off,and maintain the fixed-point hovering state after reaching the preset heightHR.
(2) Transition from helicopter mode to fixed-wing mode.
The starting point of the transition from helicopter mode to fixed-wing mode is the hovering state.At this time,we increase the forward pull propeller throttle to accelerate the aircraft while keeping the aircraft’s altitude constant, the pitch angle is a constant value of 0,and the azimuth angle in the horizontal plane and the lateral displacement remain unchanged.According to the transition mode automatic flight control law designed in Section 4.2,the instructions for the conversion from helicopter mode to fixed-wing mode are designed as follows:
The instructions for the conversion from helicopter mode to fixed-wing mode are designed as follows:
where Hconvertis the altitude during transition. After the flight speed reachesVc, the conversion mode ends. At this time, the main rotor decelerates and is locked as a fixed-wing surface,and the aircraft enters the fixed-wing flight mode.
(3) Fixed-wing mode to fly straight and level.
In this paper, we only perform straight-and-level flight for the fixed-wing mode,so,according to the automatic flight control law designed for the fixed-wing mode in Section 4.3, we only need to give the altitude command and speed command a constant value, and the commands of other channels can be kept at zero. The following instructions are designed:
(4) Transition from fixed-wing mode to helicopter mode.
During the transition from fixed-wing mode to helicopter mode, SR UAV can only decelerate through the aerodynamic resistance of the whole aircraft because it does not have deceleration devices such as engine reverse thrust and air brakes.In order to achieve rapid deceleration, this paper proposes to increase the resistance of the whole aircraft by increasing the pitch angle of the aircraft during the transition.Through many simulation tests,when 5°pitch angle is selected,it can not only achieve rapid deceleration, but also ensure the stability of aircraft attitude in the transition process.For the transition mode automatic flight control law designed in Section 4.2, the following commands are designed:o
At the beginning of the transition, the throttle of the forward pulling propeller is set to zero, the forward flight power is cut off,and the pitch angle command of 5°is given to control the aircraft to increase the resistance and decelerate by increasing the pitch angle. At the same time, we unlock and start the main rotor, give a constant value of altitude command, and generate the corresponding collective pitch control input by detecting the change of altitude response, so as to make up for the lift loss of the fixed wing after the aircraft decelerates and ensure that the altitude is guaranteed in the transition process.The displacement and azimuth command in the horizontal plane is zero,which ensures that the aircraft only moves longitudinally in the transition process. Finally, it is converted to helicopter mode and hovers at a certain altitude.
(5) Vertical landing in helicopter mode.
When landing,it will land vertically at a speed of 5 m/s,and keep the aircraft’s displacement and azimuth in the horizontal plane constant. According to the automatic flight control law of helicopter mode designed in Section 4.1, the following instructions for each channel are designed:
where H0is the altitude at the beginning of the landing.
5. Full-mode flight simulation verification
5.1. Simulation method
Based on the automatic flight control system of each mode designed in the article and the corresponding instruction model, the automatic flight simulation verification of the typical full-mode flight process of the SR UAV shown in Fig. 4 is carried out. The whole-process simulation flow is shown in Fig. 9.
Because the control laws and commands of each flight stage are different and designed separately, it is necessary to schedule these control laws and commands comprehensively in fullmode flight simulation. In this paper, the control law of each mode and flight phase is established through Simulink simulation environment, and then the Stateflow logic switching model is established. According to the simulation process shown in Fig.9,the established Simulink control law is scheduled to realize the whole process automatic flight simulation of SR UAV.
5.2. Simulation results and analysis
Based on the simulation process designed in Fig. 9, the whole process of the SR UAV is simulated. The simulation conditions are as follows: the preset flying height H = 30 m, the speed at the end of the transition is 19 m/s, and flying at fixed altitude and speed in fixed-wing mode for 10 s.The response of the whole-process simulation and the corresponding control inputs are shown in Figs. 10-14.
It can be seen from Fig. 10 that the SR UAV achieved a vertical take-off from the ground to a certain height,then transitioned from helicopter mode to fixed-wing mode, flew in fixed-wing mode for 10 s, switched from fixed-wing mode to helicopter mode, and finally landed vertically in helicopter mode. The altitude changes relatively smoothly during the whole flight process,except that the altitude fluctuates upward in the early stage of the transition from fixed-wing mode to helicopter mode, and then slowly returns to the commanded altitude. This is because a 5° pitch angle is applied during the transition from fixed-wing mode to helicopter mode. Due to the aircraft’s inertia,kinetic energy was converted to potential energy,so the altitude suddenly rose,and the altitude control system soon controlled the altitude to the commanded altitude. The altitude response in the transition process meets the requirements.
From Fig. 11, we can see that the speed changes smoothly in the whole flight process,and the forward flight speed nearly remains zero when the helicopter takes off and lands vertically.When the helicopter mode converts to fixed-wing mode, the forward flight speed increases smoothly. With the conversion from helicopter mode to fixed-wing mode, the speed slowly decreases to zero. During the whole flight mode, the speed changes smoothly and meets the expected requirements.
As can be seen from Fig.12,there is no large fluctuation in the attitude of the aircraft during the whole flight. The larger change of attitude occurs at the beginning of the transition from fixed-wing mode to helicopter mode, and the pitch angle has a step change of about 5°, which corresponds to the designed command of keeping 5° pitch angle during the transition. It is worth noting that while the pitch angle changes,the roll angle also has a large fluctuation, and soon drops to a smaller level, and the reason is that, due to the existence of the main rotor,there is a large coupling in each channel during the transition mode.During the whole flight mode,the attitude basically kept in a small range, which meets the expected requirements.
It can be seen from Fig. 13 that the control input of the whole process is reasonable and bounded. In the helicopter mode take-off and landing process,the collective pitch control is the mainly changing variable,and the control input of other channels is also moderately adjusted to keep the horizontal displacement and azimuth constant, which meets the expected requirements. During the transition from helicopter mode to fixed-wing mode,the pulling force of forward pulling propeller accelerates at the maximum value at first. When becoming fixed-wing mode,the pulling force of forward pulling propeller basically remains at a constant value for flight. At the beginning of the transition from fixed-wing mode to helicopter mode, the pulling force of forward pulling propeller becomes zero, which is consistent with the design scheme. In general,the values of each control variable are bounded and the variation is reasonable, which meets the requirements.
It can be seen from Fig.14 that the full-mode flight process realizes the vertical take-off and vertical landing, and the altitude of transition mode and fixed-wing mode flight basically remain the preset value, and the azimuth does not change significantly,which is consistent with the designed transition control law and command.
In general, it can be seen from Figs. 10-14 that the state of the SR UAV changes smoothly during the full-mode flight,and the variables do not have excessive amplitude or drastic changes, which proves that the SR UAV full-mode design method of automatic flight control system proposed in the article is feasible, laying the foundation for the subsequent flight test of the SR UAV.
6. Conclusions and outlook
This paper studies the flight dynamics modelling and control methods of the typical full-mode flight process of SR UAV.The following conclusions have been drawn:
(1) We propose and design a unified linearization strategy for flight dynamics models under multiple flight modes and variable parameter control models, and obtain linearized models under each trim state point.
(2) Based on fuzzy theory, a comprehensive model of SR UAV’s full-mode flight is established, which is convenient for the unified control system design of the fullmode flight process.
(3) According to the characteristics of the SR UAV, an explicit model following adjustment control system is designed, so that the SR UAV has good stability and robustness during the full-mode flight process.
(4) Based on the designed inner loop stabilization system,the outer loop control system and the full-mode flight command model are designed.
(5) Based on Stateflow and MATLAB/Simulink simulation tools, the designed SR UAV full-mode automatic flight control system is simulated and verified, which proves that the design method of control system has good performance and lays a foundation for the subsequent engineering flight tests.
In all, the work described in the paper provides a set of solution to the model building, and control system design of SR UAV in full-mode flight. The results will lay a foundation for the subsequent engineering flight tests. My further work is to study the robust adaptive control of SR UAV in transition mode considering complex interference,model uncertainty and other factors.
Declaration of Competing Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Acknowledgements
This work was supported by the Natural Science Foundation of China (No. 12102345), the Natural Science Basic Research Program of Shaanxi Province (Nos. 2021JQ-086 and 2021JQ-076), and Taicang Scientific Research Institute Innovation Leading Special Plan (No. tc2019dyds11).
 CHINESE JOURNAL OF AERONAUTICS2022年10期
CHINESE JOURNAL OF AERONAUTICS2022年10期
- CHINESE JOURNAL OF AERONAUTICS的其它文章
- Effect of baffle injectors on the first-order tangential acoustic mode in a cylindrical combustor
- Experimental study of hysteresis and catastrophe in a cavity-based scramjet combustor
- Flow control of double bypass variable cycle engine in modal transition
- Effects of chemical energy accommodation on nonequilibrium flow and heat transfer to a catalytic wall
- A reduced order model for coupled mode cascade flutter analysis
- Nonlinear system identification framework of folding fins with freeplay using backbone curves