平流层飞艇总体设计的基础问题
2022-11-09 04:22于春锐刘东旭
空间科学学报 2022年5期
于春锐 乔 凯 刘东旭
1(北京跟踪与通信技术研究所 北京 100094)
2(北京航空航天大学无人系统研究院 北京 100191)
0 引言
平流层飞艇是指利用距地面20 km 高度附近大气稳定、风速较小的有利条件,依靠浮力升空,采用太阳能电池与储能电池组成循环能源系统,驱动动力推进系统抗风,实现区域长期稳定驻留及可控飞行的低速临近空间飞行器。平流层飞艇具有驻空高度高、驻空时间长、承载能力大、使用效费比高等特点,在对地观测、通信中继等领域具有广阔应用前景[1–2]。
长期驻空是平流层飞艇发挥其独特优势、实现应用效能最大化的关键,同时也是平流层飞艇研制的核心难点之一。为了实现长期驻空飞行,需要通过多学科优化总体设计解决多项难题[3–7],使平流层飞艇能够适应平流层高度复杂的大气环境和热环境条件,满足浮重平衡、能量平衡、推阻平衡、热平衡等约束条件。
平流层飞艇技术复杂度高、研制难度大,相关研究尚不成熟。需要综合考虑总体设计面临的基础问题,开展针对性技术攻关,支撑系统设计与研制。本文从平流层飞艇的技术特点出发,考虑平流层环境、空气静力特征、热力学三方面基础问题,分析其对平流层飞艇总体设计、飞行特性及控制性能的影响,为平流层飞艇总体设计和技术发展提供参考。
1 平流层环境基础问题
1.1 大气风场
平流层高度大气风场相对稳定,但在不同高度、季节、地区和时间有着不同的特点。在全球中低纬度区域,20 km 高度的全年大气平均风速相对较弱,风向相对稳定,这是平流层飞艇运行的基本环境条件[8]。受全球大气环流影响,各地区风场存在季节性的变化规律[9–12]。中国北方中纬度地区,20 km 高度附近,一般在春末和夏季存在准零风层结构,平均风速低于10 m·s–1;南方低纬度地区,一般在冬季和初春有准零风层结构存在。
根据气象卫星、探空气球等获得的测量数据可知,虽然平流层高度大气风场相对稳定,但是受低空气象条件影响,几天甚至数小时内也会产生较大短时波动。例如,在中国北方中纬度地区,夏季平均风速低于10 m·s–1,但仍有短时较大风速出现。从图1 给出的某地区20 km 高度定高探空气球1 h 飞行轨迹也可以看出,风向波动十分明显。
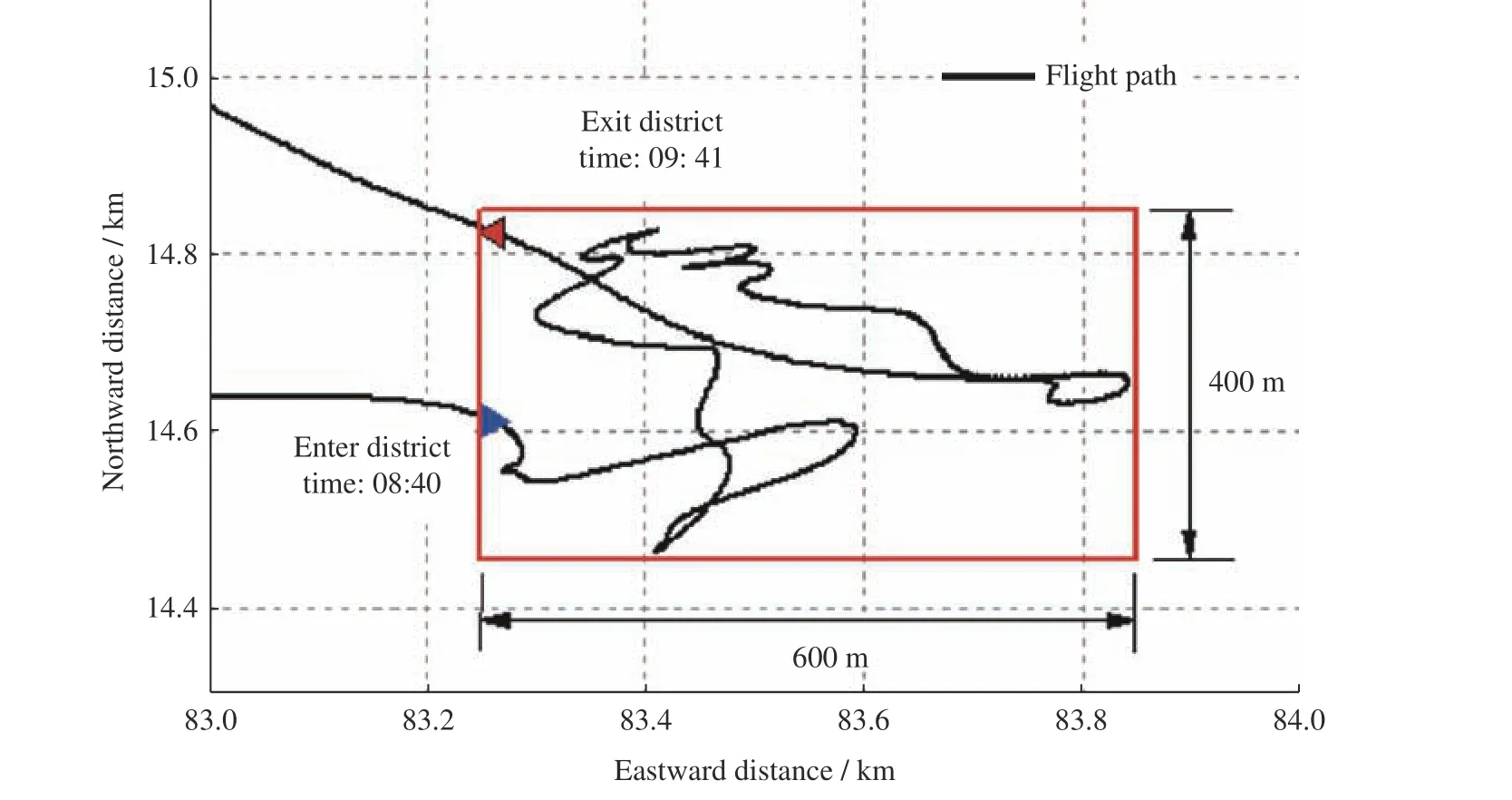
图1 某地区20 km 定高探空气球 1 h 轨迹曲线Fig. 1 One-hour trajectory of a 20 km-fixed-altitude sounding balloon in a certain area
平流层高度大气风场的特点对平流层飞艇总体设计的影响主要体现在两方面:一是由于超长驻空时间导致面临短时苛刻风场条件的几率增大,为了实现长期区域驻留,平流层飞艇平均抗风能力必须大于当地平均风速,并且有一定裕度;二是由于平流层飞艇设计飞行速度通常与当地平均风速处于同一量级,应对风速、风向扰动的能力较差,对定点驻留、航线控制、姿态控制等也有比较大的影响。
1.2 大气温度
距地面20 km 高度附近的平流层大气温度比较稳定,但不同季节、不同区域的大气温度存在5~10℃的差别。例如,在中国北方中纬度地区,受太阳与地球距离影响,通常夏季温度低,冬季温度高,温度差一般小于5℃。
平流层高度大气温度的特点对平流层飞艇总体设计的影响主要体现在两方面。一是总体设计必须考虑平流层飞艇长期驻空期间在不同区域工作时大气环境温度变化的影响,由高温区向低温区飞行时,存在夜间压力降低,无法维持形状的风险;由低温区向高温区飞行时,存在白天压差增幅过大,导致囊体安全系数降低的问题。二是总体设计必须考虑大气温度短时波动对囊体压差波动的影响,但目前尚无合适的长时定点气象探测手段,缺乏特定区域大气温度的持续探测数据,尚不掌握大气温度短时波动规律。
1.3 大气压力
距地面20 km 高度附近的平流层大气压力通常约为地面的5.4%。受到低空气象、地形条件以及大气重力波等因素影响,特定高度的大气压力始终存在一定的短时动态变化。目前已掌握特定高度的大气压力长时变化规律,但由于大气压力短时波动数据不足,尚不清楚大气压力短时波动幅度、变化速率等短时变化规律数据,需要通过长时定点飞行试验不断积累。此外,平流层飞艇飞行高度一般会同时采用气压高度和卫星导航(北斗/GPS)高度表征,由于测量设备机理不同,两个高度数值会存在一定偏差,例如在中国北方中纬度区域,夏季气压高度比卫星导航高度通常低300~500 m,如图2 所示。
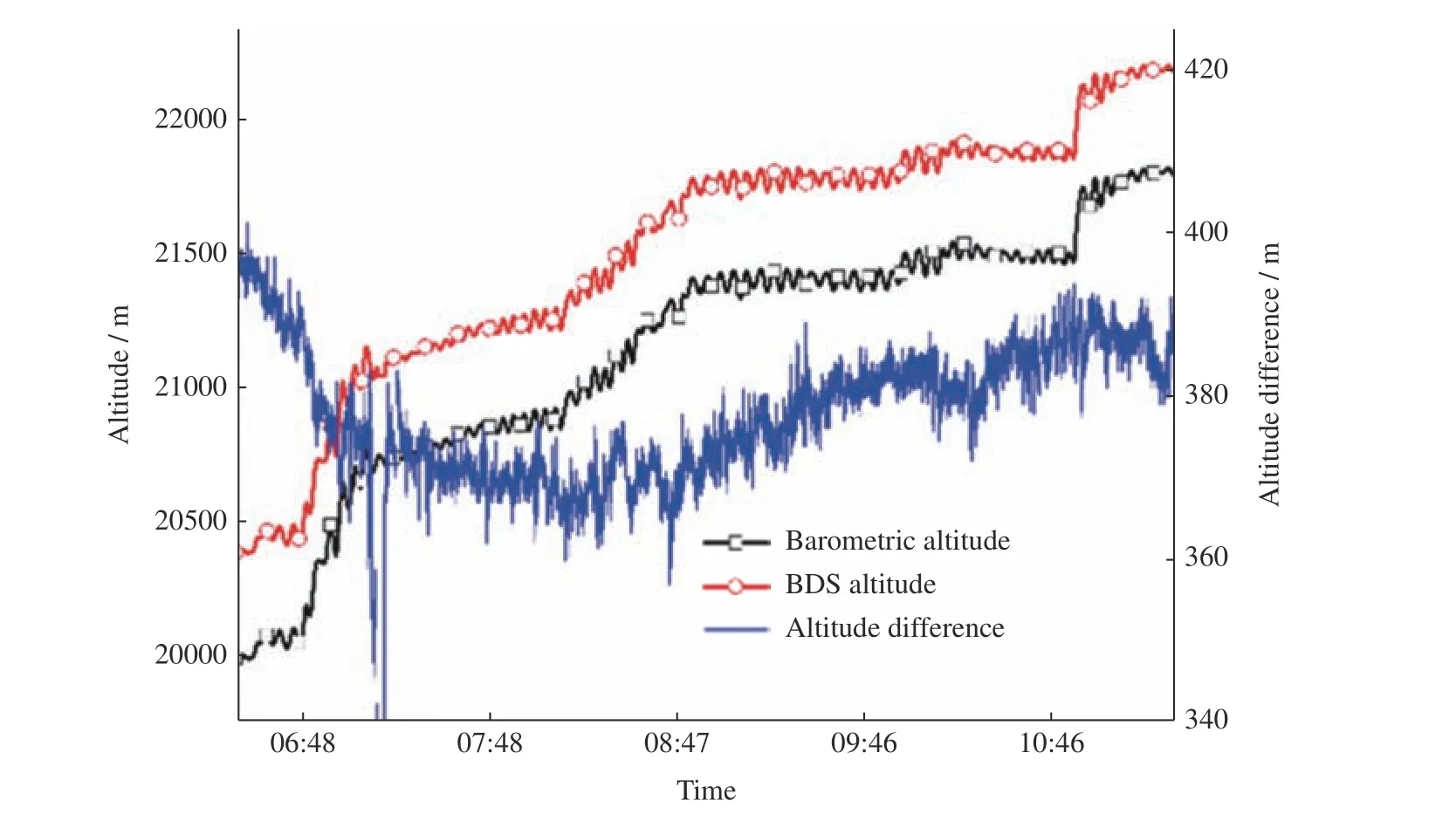
图2 某探空气球气压高度与卫星导航高度测量值曲线Fig. 2 Measured altitude curves of a sounding balloon by barometric altimeter and satellite navigation system
平流层大气压力的特点对平流层飞艇总体设计的影响主要体现在两方面。一是总体设计必须考虑平流层飞艇从地面起飞到设计飞行高度过程中,中间要经历巨大的大气压力变化,合理设计升降策略。二是总体设计必须考虑气压高度与卫星导航高度测量值偏差带来的影响,合理设计风速测量基准与抗风能力指标、位置测量基准与飞行控制策略等。
2 空气静力学基础问题
2.1 平流层飞艇纵向上升力主要来源于浮力
平流层飞艇驻空飞行过程中受到空气静力(浮力)和空气动力的共同作用[13],其受力特点与低空飞艇存在显著区别。低空飞艇可采用矢量动力或混合升力布局设计,实现纵向力配平,但平流层飞艇飞行速度低且驻空高度大气密度低的特点决定了其纵向力配平只能来源于浮力。
矢量动力是低空飞艇纵向力配平的重要方式,通过控制动力大小和矢量角度,快速改变纵向力大小,调节升重平衡,控制飞行高度。而平流层高度大气密度低,平流层飞艇可为动力推进系统分配的重量和能量有限,动力推进装置可提供的动力与浮力相比十分微小,无法用于纵向力配平。
混合升力布局也是部分低空飞艇采用的纵向力配平方式,利用舵面/安定面和艇体带迎角飞行时产生气动升力,零迎角飞行时也能产生较大气动升力。但在平流层高度,舵面/安定面产生的气动力十分微小,无法用于纵向力配平;依靠艇体迎角产生升力阻力代价和配平代价过高;混合升力布局设计不仅能耗代价过高,同时还引起囊体压差额外增加的问题,难以实现飞艇浮重平衡、推阻平衡、能量平衡和强度设计的闭环。
纵向上升力全部来源于浮力的特征,决定了平流层飞艇可用的浮重平衡控制措施十分有限,限定了飞艇总体技术方案的选择,直接影响飞艇总体设计。
2.2 平流层飞艇运行在压力高度以上
随着飞行高度增加,飞艇内部氦气体积不断增大,氦气达到最大设计体积的高度为飞艇压力高度。压力高度以下,可通过调节副气囊中空气量来保持飞艇压差和外形,压力高度以上,压差将无法通过副气囊调节。
低空飞艇常采用净重飞行,飞艇浮力略小于飞艇重量,通过矢量动力和气动升力调节高度,通过副气囊维持形状,始终保持300~500 Pa 的内外压差,始终运行在压力高度以下,飞艇飞行高度过高、氦气膨胀到最大设计体积后,压差会继续增加,超过设定安全阈值,必须通过释放氦气避免囊体破裂。因此,低空飞艇的压差主要用于维持形状,不用于高度保持。
平流层飞艇无法采用矢量动力、气动升力等纵向力调控手段,驻空过程中始终保持浮重平衡,浮力与重力相等。为保持平流层飞艇能够稳定驻空,须始终保持一定量的盈余氦气,飞艇在盈余氦气作用下持续升空,氦气膨胀到最大体积,超出压力高度并产生压差,依靠压差调控氦气密度,实现在设计高度稳定。因此,平流层飞艇始终运行在压力高度以上,飞艇压差主要用于保持高度,而不仅用于维持外形。
平流层飞艇高于压力高度运行是平流层飞艇的重要特征之一,对飞艇总体设计存在重要影响:副气囊对飞艇压力平衡的调控能力大大降低;必须应对氦气温度波动等带来的超压难题。
3 热力学基础问题
3.1 热平衡特性
平流层飞艇所处的热环境复杂,在太阳辐照、地面反照、红外辐射、自然对流、强迫对流、氦气膨胀做功的共同作用下达到热平衡[14–18]。平流层飞艇热平衡方程与运动学方程的关联项为飞行速度,飞行速度与对流换热相关,但由于平流层大气密度小且平流层飞艇飞行速度不高,对流换热强度相对较低,因此平流层飞艇热平衡方程与运动学方程相对独立,飞艇热平衡状态和气体温度主要受辐射环境影响。这与常规航空飞行器存在较大差别,热设计更接近于航天器。
虽然飞行速度引起的对流换热是相对小项,但飞行速度对温度的影响是存在的,平流层飞艇飞行速度变化会引起氦气温度波动。白天超热情况下,存在氦气温度随飞行速度增加而降低的现象;如果飞艇夜间工作为弱超热超压运行模式,则存在随飞行速度增加导致温度压力降低,甚至引起艇体无法保形的风险。
3.2 氦气超热特性
受太阳辐照影响,白天平流层飞艇囊体内气体温度高于环境大气温度,如果不采取有效措施,昼夜温差很大,将对囊体耐压和安全性造成影响。平流层飞艇总体设计必须考虑超热现象及其影响,特别是充分分析白天超热量大小、日出后超热增加速率以及超热控制措施。
白天超热量影响因素复杂,受到平流层飞艇所处热环境、自身散热能力、充气/排气操作等影响。在飞艇长时驻空飞行过程中,地面反照率、云层分布等因素会引起超热量的较大幅度波动,相关设计的边界值需要做进一步研究。飞艇囊体材料的光学特性和辐射特性在超热变化中起到决定因素,囊体材料的可见光和近红外吸收率决定了艇体吸热能力,囊体材料的发射率决定了艇体的辐射散热能力,但囊体材料发射率与温度相关,通常情况下温度越低,发射率越小,而艇体表面温度场随太阳辐照角度变化,表面温度分布存在较大梯度,飞艇艇体的发射率也是变化的,与表面温度场存在耦合,这对准确评估飞艇的散热能力带来了较大困难。同时,囊体材料低温发射率的准确测量尚需要进一步研究。
日出后超热增加速率对压力控制、囊体安全、飞行控制律设计都存在影响。由于平流层高度大气衰减较小,日出后太阳辐照强度迅速增加,艇体受热后氦气温度迅速增加。此外,日出后超热增加速率受到艇体与太阳相对夹角的直接影响,如果日出后飞艇飞行姿态角变化较大,飞艇超热将出现较大幅度的波动。采用调整飞艇飞行姿态角的方法,有助于适当控制飞艇超热增加速率。
研究超热控制措施,降低囊体超热和压差载荷,对飞艇设计和飞行安全具有重要意义。通过表面耐候功能层的设计,降低吸收发射比,是最有效和常用的超热控制办法,但是受到囊体材料厚度和面密度限制,囊体材料功能层的改进空间有限。采用遮蔽设计和气体通道散热也是一种有效的超热控制措施,但由于太阳直射角度范围较大,仅在顶部进行遮蔽设计无法保证非正午时间段的超热控制,而整体遮蔽重量和能源代价较高。
3.3 艇体表面温度分布特性
艇体表面温度场直接影响艇体内部氦气的自然对流场和温度场,进而影响飞艇浮心位置。因此,研究不同时刻及不同姿态下的艇体表面温度场变化情况,对掌握平流层飞艇浮心位置变化规律、确定稳定边界以及提高飞行控制性能等具有重要意义。
图3 给出了平流层飞艇艇体表面温度分布。从图3 可以看出,白天太阳直射点附近艇体表面温度最高,背对太阳的艇体表面温度最低,表面温度差最大可达60 K;夜晚艇体底部温度最高,飞艇顶部温度最低,飞艇顶部温度最低可达–80 ℃以下。平流层飞艇在驻空飞行过程中,太阳直射点随姿态角变化,飞艇表面温度场也随之变化,囊体材料温度可能出现快速大幅度波动。飞艇表面温度差、昼夜温度差对囊体材料的耐低温性能、高低温适应性、温度交变性能等提出了严苛要求,在总体设计与囊体材料测试方面中应充分考虑实际工况。
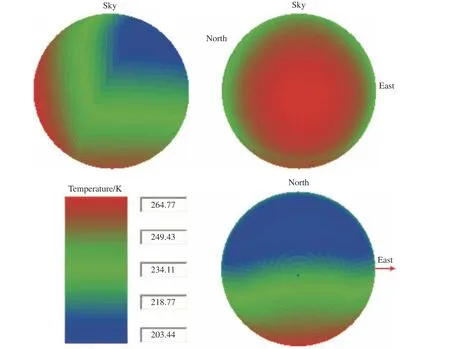
图3 平流层飞艇艇体表面温度分布Fig. 3 Temperature distribution of envelope surface of a stratospheric airship
4 结语
从平流层飞艇自身特点出发,研究了平流层环境、空气静力特征、热力学三个方面的基础问题,分析了其对平流层飞艇总体设计、飞行特性、控制性能的影响,这为完善平流层飞艇总体设计,探索关键技术解决途径等提供了支撑。
猜你喜欢
船舶与海洋工程(2022年6期)2023-01-12
成都信息工程大学学报(2022年4期)2022-11-18
海洋科学(2022年5期)2022-06-22
舰船科学技术(2022年10期)2022-06-17
北京航空航天大学学报(2022年5期)2022-06-06
中国舰船研究(2022年2期)2022-04-26
现代防御技术(2021年6期)2022-01-06
纺织科技进展(2019年12期)2019-12-26
中国舰船研究(2016年6期)2016-12-12
高原山地气象研究(2016年1期)2016-11-10