
GNSS 极化测量降雨正演模拟与实验对比
2022-11-09 04:21:54苏豆豆白伟华杜起飞孙越强谭广远
空间科学学报 2022年5期
苏豆豆 白伟华 杜起飞 孙越强 谭广远
1(中国科学院国家空间科学中心 北京 100190)
2(中国科学院大学 北京 100049)
3(天基空间环境探测北京市重点实验室 北京 100190)
4(中国科学院空间环境态势感知技术重点实验室 北京 100190)
5(掩星探测与大气气候应用国际联合实验室 北京 100190)
0 引言
降雨是研究气候变化的基本变量之一。近年来极端降水事件频发,提高降雨天气的数值预报准确性极为重要。目前探测降雨的手段多种多样,有天基降水雷达系统,例如带有降水雷达(PR)的热带降雨测量任务(Tropical Rainfall Measuring Mission,TRMM)、带有双频降水雷达(DPR)的全球降水测量任 务(Global Precipitation Measurement,GPM)。此外,还有高光谱红外探测仪、微波探测仪、地基降水雷达等。然而这些手段无法从观测值中直接或间接提取到影响水蒸气或降水的因素,均不适合观测强降水云的内部结构[1]。全球卫星导航系统(Global Navigation Satellite System,GNSS)无线电掩星(Radio Occultation,RO)技术根据无线电链路传播时的附加时延和弯曲信息,反演得到折射率、温度、密度等大气物理参量廓线,其是探测行星电离层和大气层的一种重要手段。与其他手段相比,该技术具有全天候、精度高、垂直分辨率高、系统误差低等优点。已有研究表明,GNSS RO 技术可利用极化无线电掩星(Polarimetric Radio Occultation,PRO)的潜在能力,共同探测和量化强降水事件中的大气热力学廓线和降雨信息[2]。
为有效利用GNSS RO 这一丰富可靠的数据源,提高对降雨事件预报的准确性, Cardellach 等[2]基于电磁波通过大尺寸的非球形水凝物会引起极化差分相位延迟的事实,提出了一种新的测量概念,即通过测量接收到的传播信号的水平和垂直分量的相位延迟差来探测和量化强降雨事件。这一方法已被Padullés 等[3]在实验中进一步得到证实。目前该技术正在2018 年2 月发射的西班牙低轨道地球观测卫星PAZ 上进行测试,这也是首次尝试用L1 波段来探测强降雨。这一实验被称为ROHP-PAZ (Radio-Occultation and Heavy Precipitation with PAZ)实验。若该实验最终成功,未来PAZ 卫星有望为GNSS RO 探测技术开辟新的应用领域,为厚云层覆盖区域提供全天时垂直分辨率高的热动力和降水信息。与传统的RO 任务都使用右旋圆极化接收天线有所不同,PAZ RO 使用的是两个线极化接收天线,利用IGOR 和先进GPS 接收机首次捕获GPS 传播信号的共极化和交叉极化分量,并将接收系统测量得到的两个线性极化通道之间的相移作为PRO 的观测量[4]。
为探究极化相移与降雨之间是否存在相关性,Cardellach 等[5]利用该实验早期阶段2018 年5 月10 日至2018 年10 月10 日获得的第一批PRO 剖面数据着重对极化相移进行了分析,证实了其与降水,尤其是强降水存在相关。此外,文献[5]通过初步校准消除其他系统影响,将极化相移观测的垂直剖面与其他任务的降水信息资料进行比较,结果表明ROHP-PAZ 实验测量的极化相移结果与降水的存在相一致,且存在着强降水特征。为回答大气底层在RO 射线路径上的降雨事件类型以及这些降雨事件是否产生可检测差分相位的问题,Cardellach 等[2]基于40 多万个COSMIC RO 事件以及TRMM 3 h格点化降雨信息进行了匹配模拟试验,其中有12 万个事件沿RO 射线路径出现了降雨,模拟试验结果表明极化特征通常与强度较高的降雨事件有关。此外,Cardellach 等[2]对PAZ 极化观测量敏感的降雨事件类型以及发生频率进行了估计,结果表明沿射线平均降雨率高于5 mm·h–1的降雨事件大约有90%显示出了超出可检测水平的极化特征。由于极化相移观测值不一定全部是由水凝物的影响产生的,Padullés等[6]利用2018 年5 月10 日至2019 年10 月10 日的PAZ 数据对信号进行了校准,对所有可能影响PRO 观测量的系统因素(例如天线附近金属结构、电离层法拉第旋转、发射信号不纯等)进行了分析,并使用无降水或电离层活动度低的扩展数据集对所有收集到的观测数据进行了在轨校准和验证,进一步证实了ROHP-PAZ 实验在感知降水中良好的性能,以及极化相移对雨水存在的敏感性。An 等[7]在GNSS 信号极化相移监测雨水的理论研究基础上,设计开发了一种专门用于接收双极化GNSS 信号的锥形喇叭天线,建立了用于极化GNSS 监测降雨的地基实验系统,其降雨监测结果表明:极化相移在无雨天均为零,而在降雨天则不为零,与实际情况相符。通过与气象雷达和雨量计的数据相比,验证了相移是由雨水引起的。此外,An 等[7]根据GNSS 信号穿过降雨介质的微物理过程建立并模拟了极化相移与降雨率之间的理论模型,表明极化相移与降雨率有很强的相关性,可用于估算降雨率[8]。目前国际上GNSS降雨测量领域以理论模拟研究为主,针对实际观测数据进行正演分析研究开展得较少。
目前中国还没有与PRO 技术相关的卫星任务,在极化测量强降雨方面的理论研究和相关实践较少。本文基于雨滴前向散射理论对GNSS 极化降雨测量进行正演模拟,针对不同等级的降雨事件在多种雨滴模型下的模拟效果进行讨论,并将模拟结果与新发布的PAZ 观测数据集进行对比分析,验证模拟流程的可行性和精度,以期完善和改进极化相移反演降雨理论和方法,并为提高数值预报模型准确性以及更好的理解强降水过程提供帮助。
1 正演模拟原理
PRO 技术主要是通过低轨道地球观测卫星接收来自GNSS(如GPS、GLONASS、GALILEO、北斗等)传输的信号来进行探测。GNSS 信号主要在L 波段,可以穿透厚云层和强降水来实现全天候全天时监测降雨。在实际降雨过程中,部分粒径较大的雨滴底部由于受到空气摩擦等因素变得扁平,形状表现为非球形。当GNSS 信号穿过非球形雨滴时,较短垂直轴产生的延迟与较长水平轴产生的延迟不同,会引起一定的极化相移[2]。极化相移是指极化波垂直极化分量与水平极化分量之间的相位差值,在ROHP-PAZ实验中为接收机垂直极化与水平极化端口之间的相移,其公式可表示为

极化相移又可以表示为在整个RO 射线路径上每个点前向散射得到的差分相位延迟Kdp对雨区内射线路径长度L(单位为km)的积分,公式为

而Kdp值 取决于雨滴谱分布N(D)、单个等体积直径为D的雨滴前向散射幅度fh,v(D)和雨滴倾角分布标准差σθ,有

单个雨滴的前向散射幅度大小关系到该雨滴的相对复介电常数、雨滴形状、散射计算方法等。由于雨滴可近似为纯水,其相对复介电常数可采用Liebe93 模型进行计算[10,11]。大尺寸雨滴形状实际比较复杂,可以主要由轴比(b/a,扁椭球体的短半径与长半径之比)与等体积直径(D)之间的关系来模型化表示。本研究正演模拟所用的雨滴形状模型为Beard-Chuang (BC ) 模 型[12]、Oguchi 模 型[13]、Pruppacher-Beard(PB)模型[14]、Thurai-Bringi(TB)模型[15]、Steinert-Chandra(SC)模型[16]、Green(GR)模型[17]等。
非球形雨滴的前向散射特性较为复杂,常用计算方法有Rayleigh 散射近似[18]、T 矩阵法[19,20]、离散偶极子近似法[21]等。其中T 矩阵法主要基于数值求解Maxwell 方程来进行非球形粒子散射的精确计算[19]。该方法最初由Waterman 于1965 年提出,之后Mishchenko 等学者将该方法扩展到了更大的尺寸和纵横比,可方便地进行大尺寸粒子的数值计算,并提出了非光滑表面粒子的基准T 矩阵计算方法。此方法主要利用T 矩阵将在原点展开的入射场矢量球谐波函数与散射场展开的矢量球谐波函数联系起来,求出T 矩阵和散射场,继而确定振幅等特征。T 矩阵中的元素与入射场、散射场无关,仅取决于散射粒子的形状、大小、折射率以及其相对于粒子方向的参考系。此方法快速且精确,虽然对于纵横比大、轴不对称的粒子效率比较低[20],但非常适合本文的研究,其基础公式为

其中,a和b为入射平面波的展开系数矩阵,p和q则是散射波的展开系数矩阵。
研究群雨滴前向散射特性需要选择合适的雨滴谱。雨滴谱与降雨类型、地理位置、气候变化等息息相关。研究发现指数分布、Gamma 分布、对数正态分布等数学模型适用于雨滴谱分布。应用广泛的Marshall-Palmer(MP)分布模型[22]、Sekhon-Srivastava(SS)分布模型[23]、Joss 分布模型[24]等均适用指数分布模型,Laws-Pearson 分布属于离散型分布,但也近似指数分布[25]。总之,通过选择合适的雨滴形状和雨滴谱可获得群雨滴的前向散射特性,模型的选择也同样影响着最终极化相移的大小。
2 模拟实验设计
根据GNSS 极化测量降雨及雨滴前向散射的理论,设计的模拟实验流程如图1 所示。第一步完成GPM DPR 数 据 和PAZ 数 据2018 年6 月1 日至2019 年12 月31 日共计18 个月的准备;第二步对PAZ 数据与GPM DPR 数据进行时空匹配,筛选出符合条件的降雨事件;第三步设置每个事件的参数;第四步为每个事件选择雨滴形状和雨滴谱模型;第五步对每个事件进行正演模拟计算,获得极化相移模拟值;最后将模拟值与PAZ 观测数据进行比较,分析二者之间的相关性及误差。
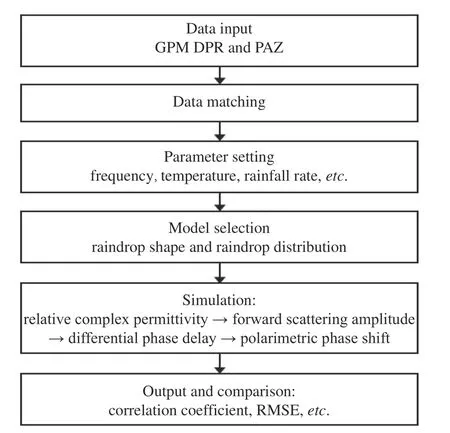
图1 降雨正演模拟实验设计流程Fig. 1 Flow chart of rainfall forward
2.1 数据输入
模拟实验采用GPM DPR 数据作为降雨率数据源,采用PAZ 卫星Level-1 b 数据作为实测数据进行匹配。
2.1.1 GPM DPR 数据
全球降水测量(GPM)是一项提供全球范围内雨雪观测的国际卫星任务,其主要测量的是热带和亚热带海洋上的大尺度到中尺度的降雨,为全球降水测量提供了更高的准确性、更大的覆盖面积和动态范围,是研究降水特征的重要数据。GPM 主要仪器之一是双频降水雷达(DPR),其由Ku 波段降水雷达(KuPR)和Ka 波段降水雷达(KaPR)组成,是一种能够精确测量降水的星载降雨雷达。DPR 对高纬度地区的小雨和降雪测量比TRMM 更灵敏[26]。
DPR 日数据(3 DPRD)中含有平均降雨率数据,可以为正演模拟提供降雨率信息。其覆盖范围为±67°纬度,空间分辨率为0.25°×0.25°,有地表面降雨数据以及距离地面2 km,4 km,6 km,10 km 和15 km 处的降雨率数据,但一般有降雨发生的地方只在4 km 以下。DPR 2 A 级轨道数据含有空气温度和水凝物等体积直径信息,该数据集等体积直径信息在部分降雨区域存在缺省,部分信息只能作为最大粒径值的参考,具体值还需不断实验计算以取到合适的值。
2.1.2 PAZ 数据
这里使用的PAZ 数据是经过修正和校准后的Level-1 b 观测数据,可在ROHP-PAZ 官方网站进行下载,文件格式为NETCDF4_CLASSIC。该组数据于2020 年4 月发布,由从ROHP-PAZ 实验中提取的一级(观测值)数据组成。观测值是PAZ 低地球轨道飞行器上的天线接收的GPS 无线电链路的L1 频率水平和垂直极化信号分量之间的极化相移,以mm 为单位。该组数据中包含的观测值校正了残余周跳并校准消除了包括接收系统(如天线相位)和电离层影响等系统影响。每个RO 数据中包括四类观测值,分别是每个极化端口的原始附加相位、修正极化相移、线性校正的极化相移( ΔΦlin)和天线相位校正的极化相移( ΔΦant)[27]。本实验所使用的观测值主要为ΔΦlin和 ΔΦant。
2.2 数据匹配
对GPM 和PAZ 数据进行匹配,需先通过计算RO 事件开始发生时射线的切点位置以及事件结束时射线的切点位置,从而确定每个RO 事件发生的大致范围。每条RO 射线的切点位置可由PAZ 数据中GPS 位置、LEO 位置及时间信息进行计算。其次,确定每个RO 事件的遍历区,即距离RO 事件开始切点与结束切点连线1000 km 的范围内。最后,对GPM降雨数据在确定好的遍历区域内获取每个RO 事件发生区域内的降雨信息。如果射线切点所在格网有雨发生,则保留该事件,反之则不进行统计。
由于数据的限制,无法完全做到降雨数据与PRO 观测数据三维匹配(经纬度和时间)。因此,遵循三个匹配原则筛选降雨事件:一是地理位置相匹配;二是RO 事件发生时间与GPM 卫星扫描时间间隔不超过3 h;三是RO 射线切点所在网格与降雨区域的交集在两个降雨单元以上。
2.3 参数设置
将筛选得到的每个降雨事件频率均设置为L1 波段的频率,大约为1.57542 GHz。降雨率(单位为mm·h–1)、温度(单位为K)数据均来自DPR 数据,最大粒径值(单位为mm)参考DPR 数据中的等体积直径值。雨区路径长度为RO 事件所经过的雨区长度(单位为km),其大小取决于降雨区域与RO 射线路径的重合长度。一般情况下,雨滴倾角分布的影响较小[8]。因此本实验不考虑雨滴倾角对模拟结果的影响,将雨滴的倾斜角度均设置为0°,雨滴倾角分布标准差设置为0°。
2.4 模型选择
为每个降雨事件选择适合的雨滴形状和雨滴谱分布。模拟实验共选择7 种雨滴形状模型搭配各种雨滴谱分布模型来进行正演,所选用的雨滴形状和雨滴谱模型分别列于表1 和表2,其中R代表降雨率。
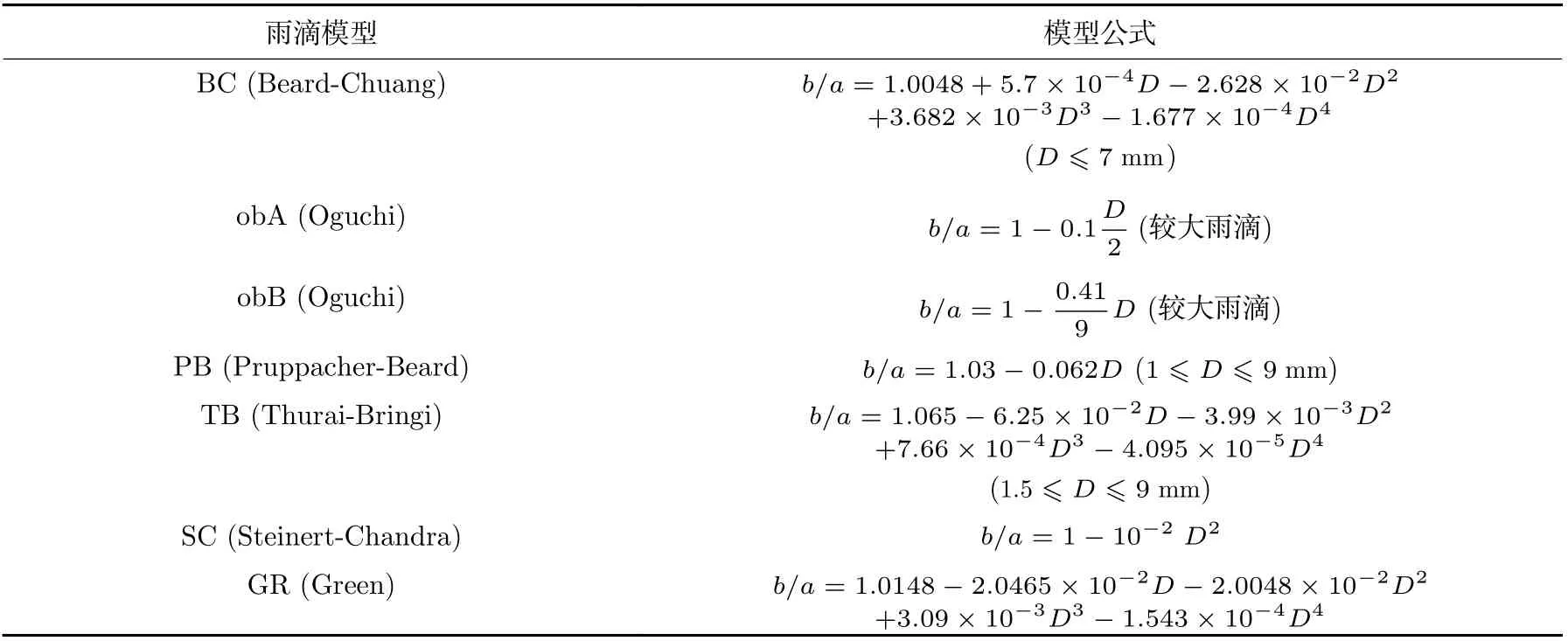
表1 正演所用雨滴模型Table 1 Raindrop models used in forwarding performance
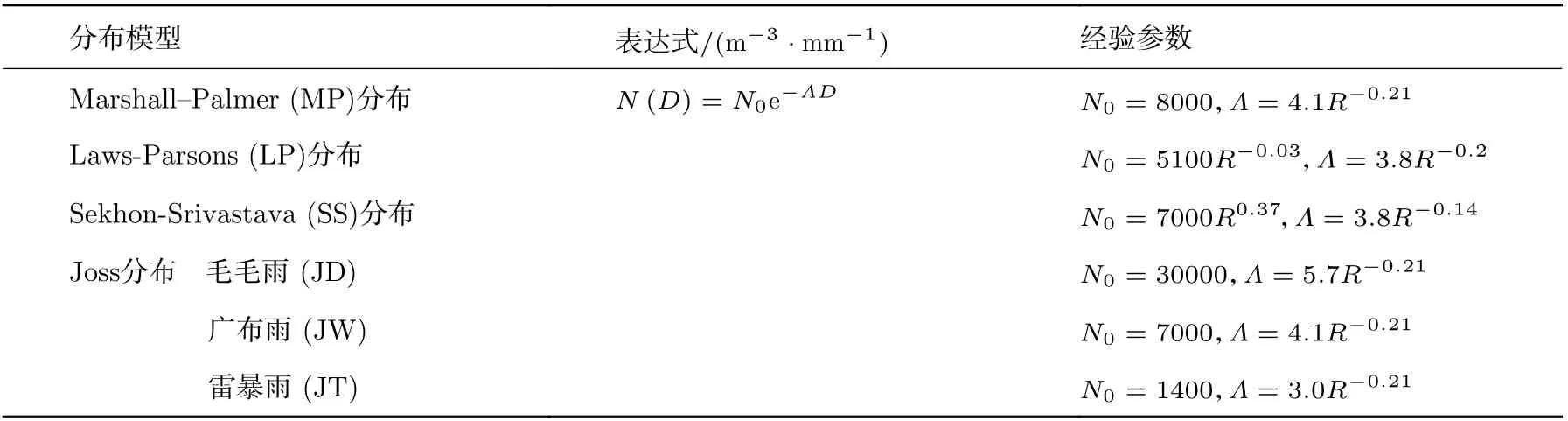
表2 正演所用雨滴谱分布Table 2 Raindrop size distribution models used in forwarding performance
2.5 模拟计算
各种参数、雨滴形状模型、雨滴谱分布模型均设置完毕后,首先采用Liebe1993 模型公式计算近似纯水的雨滴相对复介电常数,其次采用T 矩阵方法计算单一雨滴水平极化和垂直极化的前向散射幅度fh,v(D),之后选择合适的雨滴谱分布模型通过式(3)计算每公里的差分相位延迟Kdp,最后通过式(2)计算整个RO 事件在对应雨区产生的极化相移。
2.6 对比分析
2.6.1 相关性分析
将模拟值与PAZ 观测数据对比,计算模拟值(K′)与观测数据(K)之间的总体皮尔逊相关系数,有

希尔不等系数为

其中,降雨事件总数为n。皮尔逊相关系数越接近于1,说明模拟值与观测数据相关性越高,反之则不相关。希尔不等系数越小,则正演模型精度越高。
2.6.2 误差分析
分析模拟值与观测值的误差,计算二者的均方根差(RMSE,Erms)、平均绝对误差(MAE,Ema)和残差平方和(SSE,Ess),有

其中,n为事件总数,平均绝对误差可以避免误差抵消,反映模拟值与观测值误差的实际情况,残差平方和越趋于0,表明模拟结果越好。
3 结果与分析
经过对2018 年6 月1 日-2019 年12 月31 日期间的GPM DPR 数据与PAZ 数据进行时空匹配,筛选出符合匹配原则的降雨事件共计26 个,以下介绍和分析典型降雨事件以及26 个降雨事件的正演模拟结果。
3.1 典型降雨事件正演模拟
探讨对不同降雨等级事件的模拟,以及在选择不同的雨滴形状和不同的雨滴谱分布模型下的正演效果。由于筛选的降雨事件中没有大雨、暴雨等降雨率较高的事件,因此这里只分析小雨事件和中雨事件。
3.1.1 小雨事件模拟
重点分析2018 年12 月19 日16:54 UT 时发生RO 的小雨典型事件。该小雨区域地理范围广,垂直分布可达4 km 高度,降雨带以及延伸范围内降雨单元的最高降雨率为5.0298 mm·h–1,整个区域内各个降雨层的平均降雨率分别为1.0070,1.1456 和0.8432 mm·h–1,沿射线路径平均降雨率为1.4317 mm·h–1,整体降雨率偏小。GPM 卫星扫描雨区时刻为16:16 UT,时间相差不到1 h。图2 为该雨区的模拟结果,图2(a)为各个降雨层的降雨率分布,最上层所在高度为4 km,中间层所在高度为2 km,最下层为地表面,图2(b) 为RO 事件与各层雨区交集图,红色线段代表20 km 以下高度的RO 射线切点轨迹,可知每层降雨信息丰富且均与RO 事件相交,RO 射线所经过雨区的降雨率均在3 mm·h–1以下。RO 发生时各条射线的切点轨迹变化大致可呈现出一条曲线,如图3 所示。计算时忽略了射线弯曲效应。
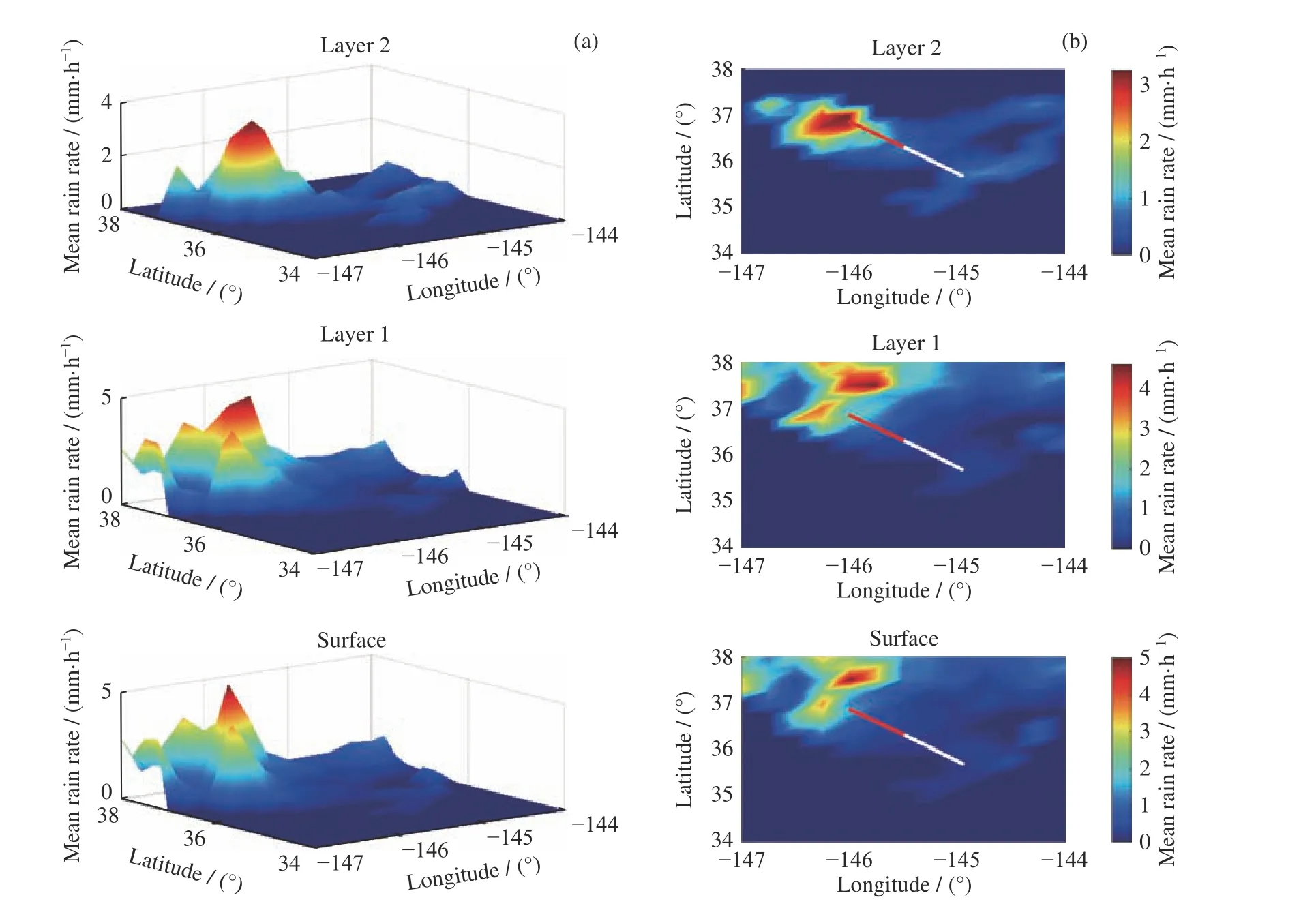
图2 2018 年12 月19 日降雨事件雨区模拟Fig. 2 Rain zone simulation of the rain event on 19 December 2018

图3 2018 年12 月19 日 16:54 UT 掩星切点轨迹变化Fig. 3 Tangent points trajectory of the occultation event at 16:54 UT on 19 December 2018
选用7 种雨滴形状搭配5 种雨滴谱分布对降雨事件进行模拟,所得极化相移列于表3。将模拟结果依次与实测数据 ΔΦlin和 ΔΦant进行对比,可知TB 和SC 模型相对于其他模型来说与实测结果更接近。选择TB 雨滴形状模型时,采用LP、SS 和JW 雨滴谱的模拟结果更接近于 ΔΦlin,其中SS 雨滴谱模拟结果更好;选择SC 雨滴形状模型时,采用MP、LP 和JD 雨滴谱的模拟结果与 ΔΦant更相符,且采用JD 雨滴谱模拟结果更好。其余雨滴形状模型在5 种雨滴谱分布下的正演结果与实测数据相差较大,均不适合模拟该小雨事件,偏差最大的为obA 模型。
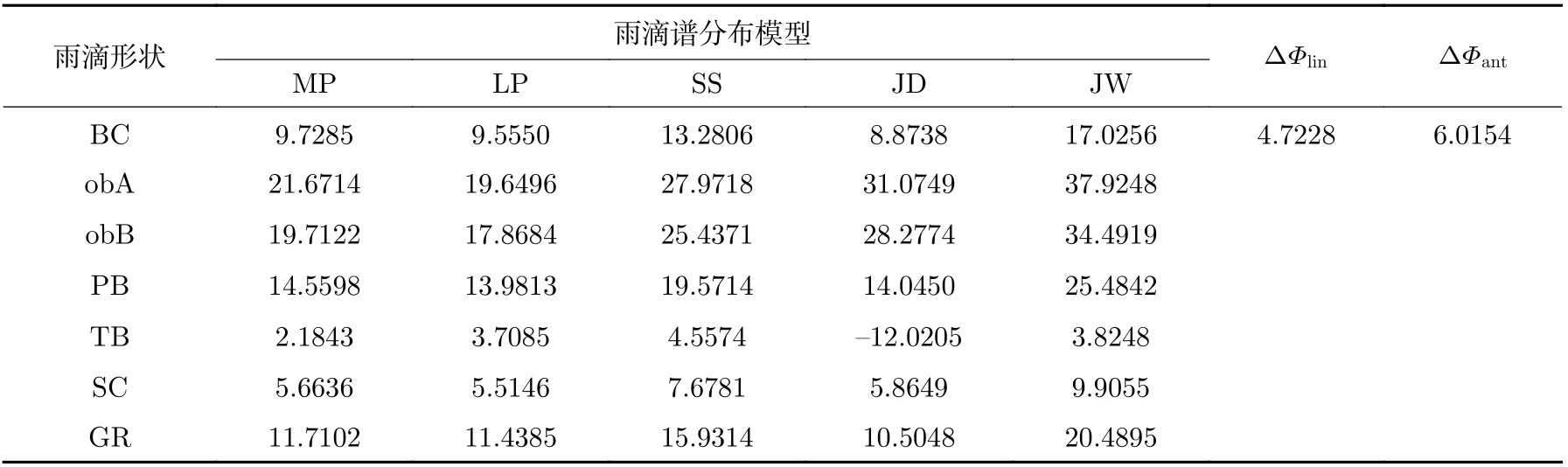
表3 2018 年12 月19 日降雨事件正演结果Table 3 Forward results of the rain event on 19 December 2018
3.1.2 中雨事件模拟
选 择2019 年12 月19 日21:14 UT 时发生RO事件的降雨区作为中雨典型事件进行分析。该雨区位于赤道地区,降雨信息较为丰富,垂直分布高度同样可达4 km,GPM 卫星经过时刻为23:39 UT,时间相差两个多小时,各个降雨层的平均降雨率为2.9487,2.8481 和2.4301 mm·h–1,沿射线路径平均降雨率为3.9332 mm·h–1,整个降雨带及其延伸范围内的最高降雨率达26.2236 mm·h–1。图4 和图5 分别为雨区模拟图以及RO 事件发生时各射线切点的位置变化轨迹图,从图中可明显观察到RO 事件穿过了纬度为2°左右的降雨区。

图4 2019 年12 月19 日降雨事件雨区模拟Fig. 4 Rain zone simulation of the rain event on 19 December 2019

图5 2019 年12 月19 日21:14 UT 时的掩星切点轨迹Fig. 5 Tangent points trajectory of the occultation event at 21:14 UT on 19 December 2019
将模拟的极化相移与表4 的实测数据相比较可知:选择GR 雨滴形状时在MP 分布下模拟值与ΔΦlin更 接近,在JD 分布下则与 ΔΦant更接近;选择PB 模型时在LP 分布下模拟值更接近于 ΔΦlin。选择TB、SC 模型得到的模拟值均偏小,选择obA、obB 模拟值均较大,因此这些模型均不适合该事件的模拟。
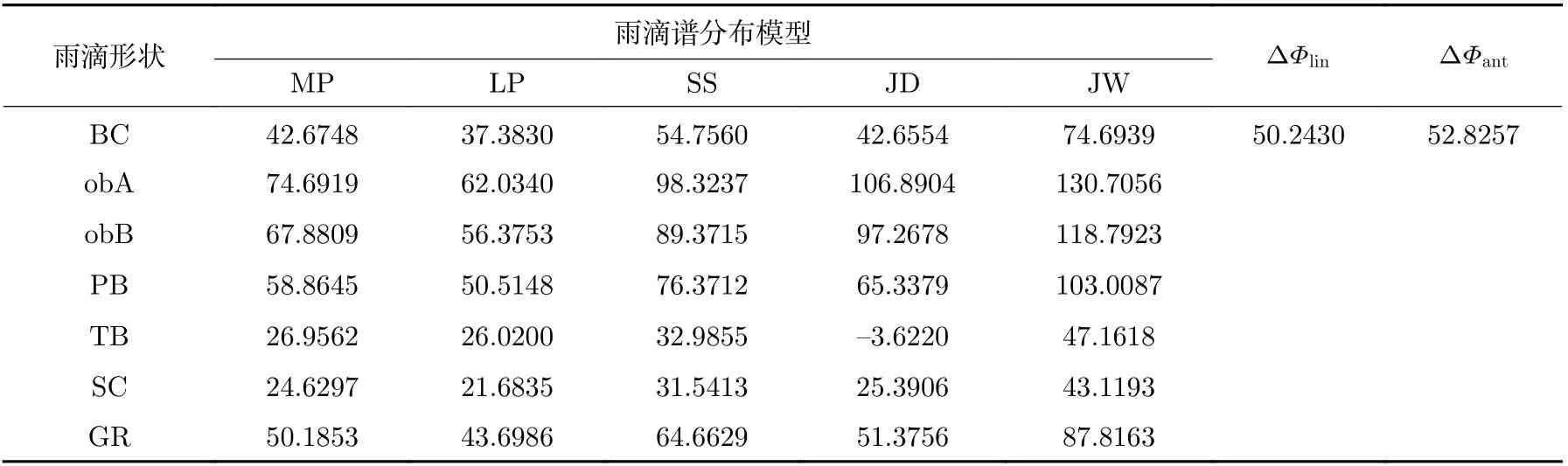
表4 2019 年12 月19 日降雨事件正演结果Table 4 Forward results of the rain event on 19 December 2019
3.2 降雨事件正演结果统计分析
图6 给出了各个降雨事件参数数值分布,可直观了解各个降雨事件的特征,包括温度范围、雨区路径总长度(L)和沿射线路径平均降雨率。由图6 可知,所有降雨事件中平均降雨率在5 mm·h–1以下的事件占88%,空气温度在290 K 以上的居多,总路径长度在70 km 以下的居多。

图6 所有降雨事件的参数Fig. 6 Parameter value of all rainfall events
表5 为各个降雨事件的信息、沿射线路径平均降雨率、达到最优模拟结果所选择的雨滴谱、雨滴模型和最大粒径等。均在雨滴倾角分布标准差为0°的条件下对降雨事件进行了正演。从表5 可知,选用MP 分布和SS 分布结果更优的降雨事件各占30%,选用LP 分布的事件占19%;选用TB 雨滴形状的事件占58%,为最多,其次为选用SC 模型占19%;有19%的事件采用MP-TB 组合时模拟结果达到最优,采用SS-TB 组合、LP-TB 组合的事件各占15%。除此之外,选择TB 模型的事件沿射线路径平均降雨率均在1 mm·h–1以上,而在1 mm·h–1以下的事件多选用SC 或PB 模型。
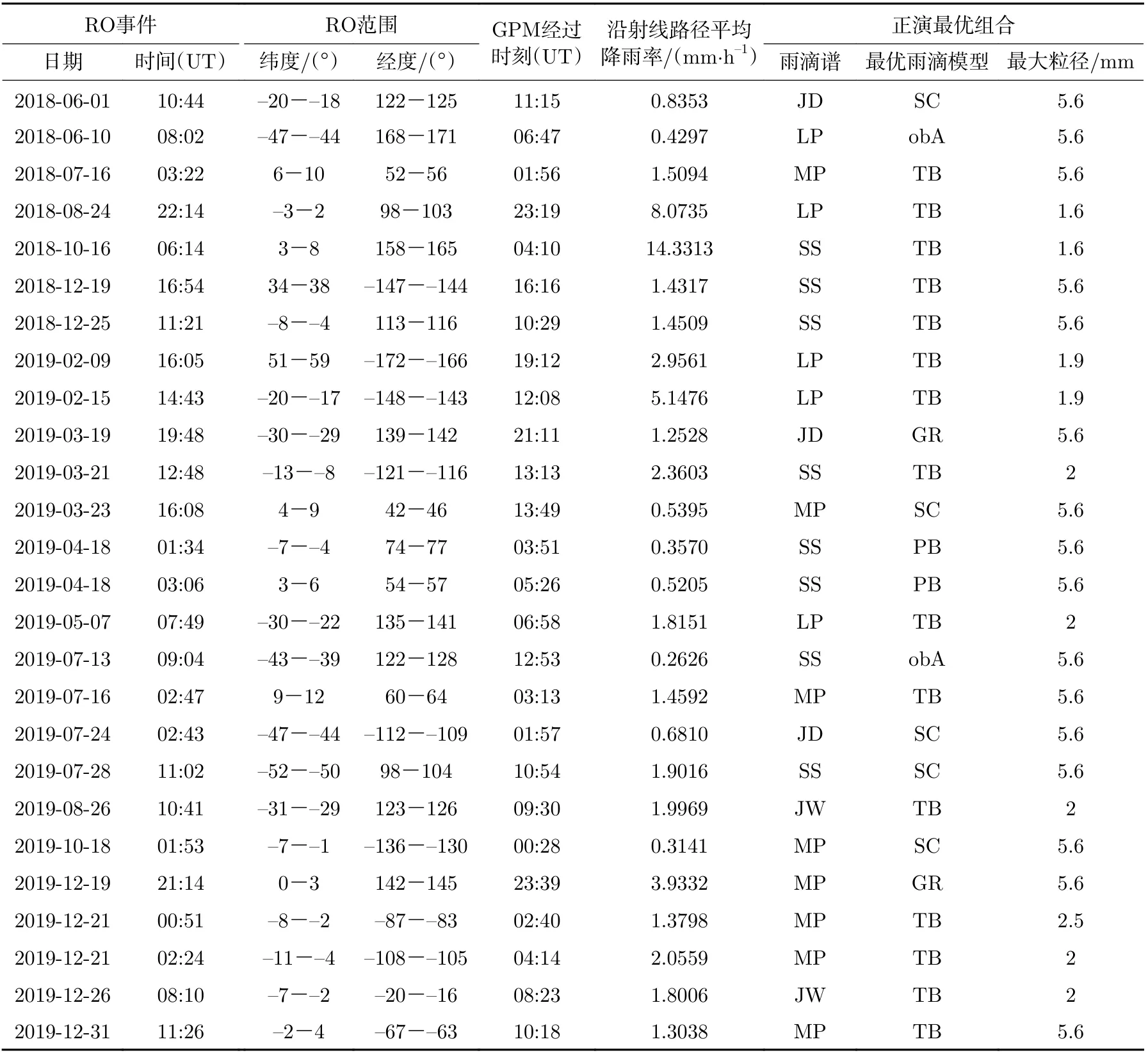
表5 降雨事件信息以及模型最优选择统计Table 5 Statistics of rainfall events information and optimal model selection
对上述降雨事件进行正演模拟得到的极化相移(ΔΦ) 与实测数据线性校正后的极化相移(ΔΦlin)和天线相位校正的极化相移( ΔΦant)均呈显著的线性关系(见图7),其皮尔逊相关系数分别为0.9994、0.9933;希尔不等系数分别为0.0165 和0.0598,几乎接近于0,说明了正演模型可行且精度高,也间接反映了极化相移与降雨之间存在相关性。
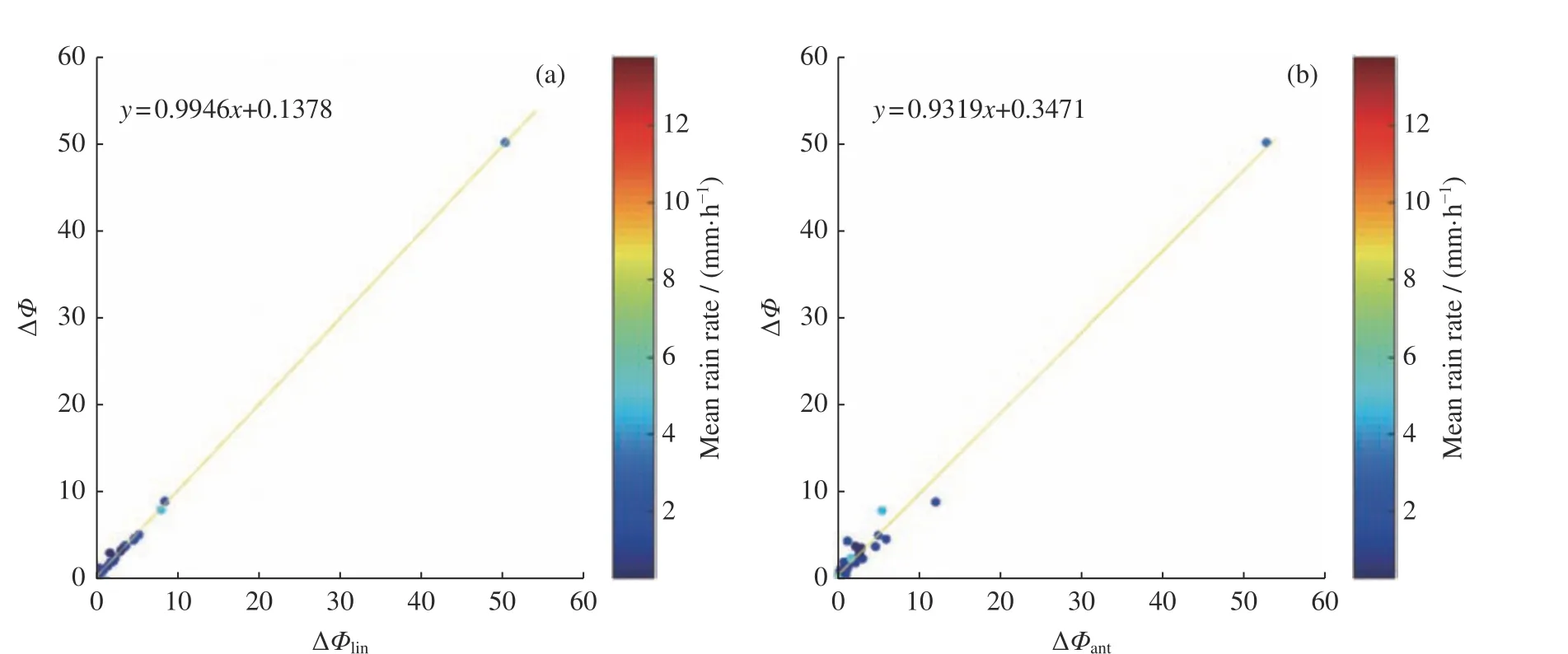
图7 ΔΦ 与Δ Φlin 和Δ Φant 的关系Fig. 7 Relationship between ΔΦ and Δ Φlin ,ΔΦant
误差分析结果表明: ΔΦ与 ΔΦlin的Erms,Ema和Ess分 别 为0.3429,0.2112 和3.0566; ΔΦ与 ΔΦant的Erms,Ema和Ess分 别 为1.2765,0.8557 和42.3631。后者均大于前者,说明正演模拟值更接近于线性校正后的极化相移。
4 讨论
通过对在GPM DPR 数据和PAZ PRO 观测数据集中筛选得到的26 件降雨事件进行正演模拟以及与PAZ PRO 数据对比分析得知:当沿射线路径平均降雨率在1 mm·h–1以上时,大部分降雨事件雨滴形状选择TB 模型、雨滴谱选择MP 或SS 分布模型时模拟结果更优;当沿射线路径平均降雨率在1 mm·h–1以下时,正演模拟选择SC 或PB 模型作为雨滴形状、雨滴谱选择MP 分布或JD 分布时结果更优;所有降雨事件正演后得到的极化相移与PAZ 数据有显著的线性关系,且更接近于线性校正后的极化相移。上述结论可以说明所设计的正演模拟流程以及选用的模型可行且精度较高。由于降雨会受到当地气候、地形、海拔高度等多方面的影响,进行正演时雨滴形状和雨滴谱选择较多,且选择不同的模型所得到的结果也相差很大。为了减少未来研究中的模型选择困难,建议对降雨率较小的事件(1 mm·h–1以下)进行模拟时,最优雨滴谱模型采用MP 或JD,雨滴形状采用SC 或PB 模型;对于降雨率较大的事件,(1 mm·h–1以上)最优雨滴谱采用MP 或SS 分布、雨滴模型采用TB 模拟结果最优。
本研究中所有降雨事件的模拟结果与实测数据之间具有较高的相关性,但依然存在以下问题需要今后进一步分析和探讨。
(1)所筛选出事件数量较少,处于中雨以上等级的事件也较少,是否能应用到更多类型的降雨事件还需进一步验证。
(2)未考虑射线的弯曲效应,这对每个降雨单元对应切点的相移大小是否产生影响还需进行验证。
(3)由于雨滴倾角数据的缺乏,未考虑雨滴倾角对结果的影响。
(4)由于数据的限制,未对每个雨区进行细致划分,分辨率较低,本文结论对小范围降雨事件正演的适应性尚不能确定。
5 结语
通过将GPM DPR 数据与PAZ PRO 观测数据集进行时空匹配,筛选出降雨事件共计26 个,为每个降雨事件选择了不同的雨滴形状和雨滴谱模型进行正演模拟,最后提出了适合小雨、中雨等级事件正演的最优雨滴形状和雨滴谱模型。结果表明,所获得的极化相移与实测数据之间呈高度相关且误差较小,更贴近线性校正后的极化相移,侧面反映了极化相移与降雨之间存在一定的相关性,验证了正演模拟理论的正确性以及实验流程的可行性,对进一步完善PRO 反演降雨的理论以及提高降雨事件预报的准确性有重要作用。
致 谢 GPM DPR 数 据 由earthdata 官 方 网 站(https://earthdata.nasa.gov/)提 供,PAZ PRO 数 据 由ROHP-PAZ 官 方 网 站(https://paz.ice.csic.es/dataAcces.php?idi=EN)提供。
猜你喜欢
中学生数理化·七年级数学人教版(2020年12期)2021-01-18 06:57:46
中学生数理化(高中版.高考数学)(2020年12期)2021-01-13 09:12:16
草原歌声(2020年3期)2020-12-08 22:22:28
学生天地(2020年24期)2020-06-09 03:08:56
中学生数理化·七年级数学人教版(2019年12期)2019-05-21 02:53:50
中等数学(2018年7期)2018-11-10 03:29:04
小学生导刊(2018年19期)2018-08-21 01:44:50
中成药(2017年3期)2017-05-17 06:09:16
福建中学数学(2016年4期)2016-10-19 05:09:02
儿童绘本(2015年7期)2015-05-25 17:55:30
