
基于深度学习的水下光学图像分类识别方法研究*
2022-11-09 07:27汤永涛林鸿生
舰船电子工程 2022年8期
汤永涛 林鸿生 刘 兴
(1.海军士官学校 蚌埠 233012)(2.南京航空航天大学 南京 210016)
1 引言
我国沿海分布有大量港口,在国际形势风云变化的情况下,港口的防御压力巨大。敌对势力可利用水下蛙人、机器人以及小型水下运载器等从水下趁虚而入,对重要设施进行破坏[1]。目前水下安全监视主要利用水声技术对水下目标进行探测、分类、定位和跟踪。但声呐系统易受水下环境及目标属性等条件制约,很难获得准确、直观的目标识别结果。相对于水声而言,水下光学探测具有成像分辨率高、细节丰富、成像速度快等优点。因此,水下光学探测逐渐成为水下探测的一种有效辅助手段[1~2]。
但是,由于水和水体中的杂质对光信号存在着吸收、散射等效应,水下光学图像普遍存在着对比度低、噪声突出等问题[3~4]。这给水下目标的自动分类识别带来困难。
深度学习在图像分类识别方面表现非常出色。自 2012年Krizhevsky等提出AlexNet[5]以来,学者们开发出了多种用于分类识别的深度神经网络结构,如 VGGNet[6]、GoogleNet[7]、ResNet[8]、ResNeXt[9]、NASNet[10]、EfficientNet[11]等。这些网络结构在ImageNet数据库上能得到很不错的准确率(各种经典网络在ImageNet数据库测试集上的准确率见图1(a))。但这些分类网络在实际应用中存在两个问题:一是用于训练小型数据集时容易出现过拟合,因为它们都是针对大型数据库进行设计的,网络结构复杂,参数量巨大(见图1(b));二是较难应用于移动设备,移动设备硬件性能受到限制,无法与服务器等大型硬件相比,这些大型网络由于模型巨大,推理时间较长,在移动设备上应用会受到限制,实时性不能满足要求。
在偏向于应用到移动设备的网络中,也出现了像 MobileNet[12~14]、ShuffleNet[15]、GhostNet[16]等高效的轻量级网络。但它们的分类准确率与大型网络相比,仍有不小的差距。图1为各种网络的准确率与参数量比较,以白框表示的为MobileNet、ShuffleNet、GhostNet。

图1 经典网络的性能对比
本文在上述背景的基础上,针对水下光学图像小数据集目标分类的问题,利用深度学习方法进行研究,从迁移学习与轻量化网络设计两个方面进行。
2 理论基础
2.1 迁移学习
随着各种网络架构越来越成熟,迁移学习的重要性在逐渐提高。大型网络在大型数据集上的训练对于普通研究人员来说很难实现(硬件设备,训练时间很难得到保证),而越来越多的企业在网络上分享了他们在大型数据集上训练过的网络模型,这为普通研究人员节省了大量训练时间。
迁移学习定义为:给定一个源域Ds和一个学习任务Ts,一个目标域Dt和一个学习任务Tt,迁移学习的目的是使用在Ds和Ts上的知识帮助提高在目标域Dt上的预测函数fT(x)的学习[17]。迁移学习的目的是利用现有的训练过的网络模型,改进目标域的学习效果。本文利用迁移学习训练的过程如图所示。首先对预训练模型进行随机初始化后,利用小数据集进行训练,训练稳定后,取出网络模型进行推理,最后利用测试集对其性能进行测试。

图2 迁移学习示意图
2.2 深度可分离卷积
单个卷积核具有两个空间维度(宽度和高度)和一个通道维度,在卷积过程中需要同时映射跨通道相关性和空间相关性。在卷积核数量较多的情况下,计算量巨大。
深度可分离卷积(Depthwise separable convolution)[18]把映射空间相关性和映射通道间相关性的任务分离,不同的通道独立起来,先进行特征提取,再进行特征融合,这种方式充分利用模型参数进行特征学习,大幅降低计算量,从而让网络效率更高。
典型的深度可分离卷积如图3所示。对于n个通道的卷积操作,首先对每一个通道独立进行空间卷积,然后使用concat操作把各个通道连接在一起,最后进行逐点卷积(1×1卷积)实现跨通道融合。

图3 深度可分离卷积示意图
3 建立数据集
本文分类目标为潜水员、机器人及小型水下运载器、水下生物等三种。主要搜集方式为因特网。考虑到水下目标有近有远,搜集到的图像分辨率有大有小,最后水下生物图片为505张(分辨率从40×38到743×497,分辨率为100×100以下的有176张),潜水员图片为535张(分辨率从44×52到867×549,分辨率为100×100以下的有110张),水下运载器图片为337张(分辨率从53×68到890×629,分辨率为100以下的有20张)。
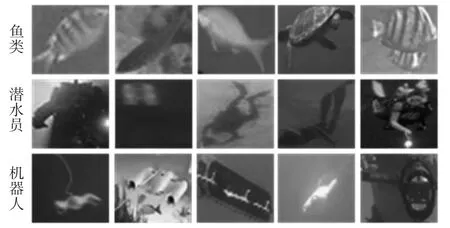
图4 本文数据样例
最后,采用旋转、镜像等方式对数据进行扩增,作为训练和测试的数据集(水下生物为1002张,潜水员为1005张,水下机器人为996张)。
4 网络结构设计
本文场景为水下,数据较难收集,属于小数据集的应用场景。针对小数据集的分类模型设计,主要有两种方法:一种是迁移学习,另外一种是设计轻量化的模型,重新训练。
4.1 迁移学习设计
大型数据库的分类识别模型训练,对硬件要求较高,而且常常需要训练较长时间。迁移学习的好处在于节省训练时间,同时对训练的硬件设备要求较低,而且还能得到比较好的预测结果。
ImageNet是一个大型数据库,各个经典网络在ImageNet测试数据集的准确率以及网络的计算复杂度如图5所示。其中FLOPs(floating point operations),表示浮点运算次数,代表模型的计算复杂度。
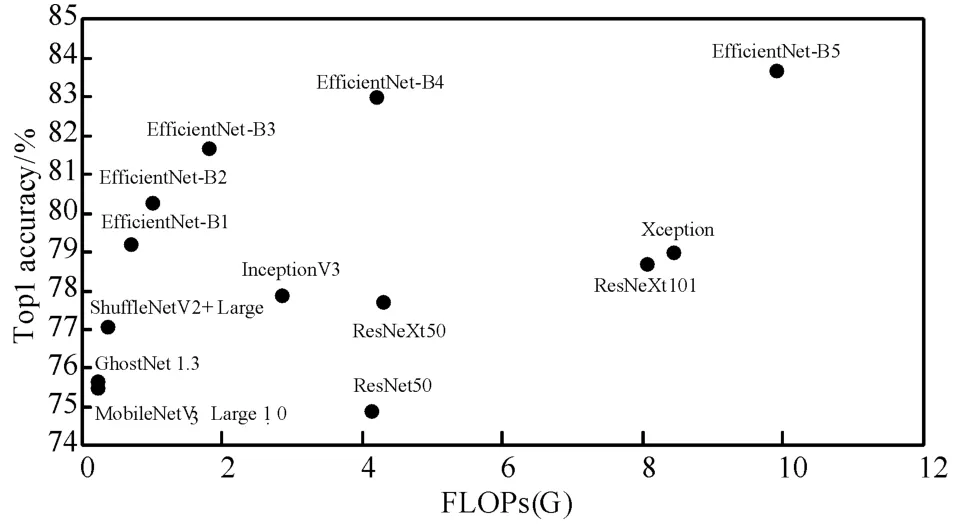
图5 经典网络的准确率和复杂度
从图中可以看到,计算复杂度较小,且准确率较高的网络模型有很多。本文选取计算复杂度在6GFLOPs以下,且准确率达到77%以上的网络进行迁移学习。
用于图像分类的卷积网络架构包括了两大部分:特征提取层(它们包含一系列卷积和池化层)和分类器(一般是密集连接的全连接层)。由于本文分类器与预训练模型的分类器不同,所以进行迁移学习时,对预训练模型的分类层进行改变,具体如图6所示。其中全连接层分为2层,分别有256个节点和3个输出节点(分类目标为3类)。送入网络进行训练的图像统一设置为128×128(宽度×高度,单位为像素)大小的RGB图像,且经过归一化处理。

图6 迁移学习设计
4.2 轻量化模型设计
深度学习模型在水下目标的分类识别中的应用偏向于移动设备的部署,这就要求网络模型要较小,计算速度要快。
本文设计的网络结构如图7所示。主要由卷积层(CONV)、池化层(MAXPOOL)和深度可分离卷积模块(DWCONV)组成。具体卷积核数量如表1所示。

图7 本文网络结构
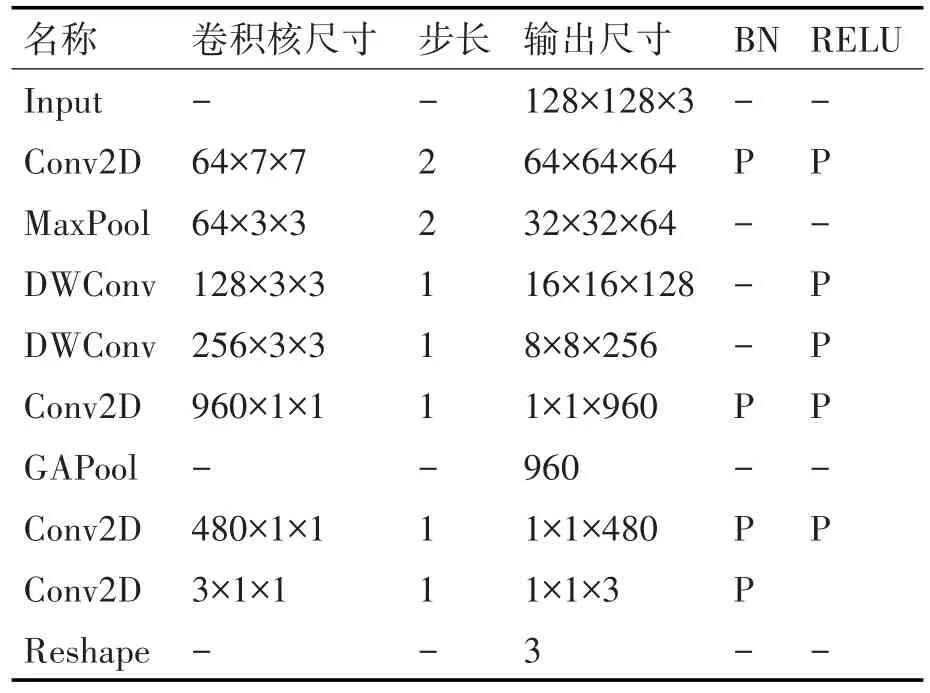
表1 ShuffleNetV2的测试结果
考虑到分辨率较小的图片比较多,所以输入选择统一缩放到128×128大小。第一个卷积层用于提取图片的特征,选择7×7的大卷积核,感受野比较大,特征提取效果较好。DWCONV模块结构如图8所示,分为2个通道,分别提取不同细节特征。最后,用最大平均池化(GAP)和1×1卷积核代替分类层的全连接,减少计算量。

图8 DWCONV模块结构
5 实验结果
本文各种算法基于keras和pytorch框架实现,在Ubuntu中用Python进行实验。训练平台采用CPU为 intel i7 7700K,显卡为nividia gtx 1080,内存为16G的台式机。训练过程中采用GPU加速。
5.1 迁移训练
迁移训练时,对各种网络在ImageNet数据集下训练得到的模型进行初始化;优化算法采用可以自适应的Adam算法;初始学习率设置为0.0001;损失函数采用交叉损失熵;Batchsize设置为32;epochs设置为20;每个epoch迭代200次;每次epoch开始的时候,对训练数据进行打乱。
其中两个典型的网络EfficientNet-B1和InceptionV3的训练曲线如图9所示,其中方格点标示的曲线为准确率曲线,圆点标示的曲线为损失曲线。红色线为测试集的曲线,蓝色的为训练集的曲线。

图9 迁移学习的训练曲线
从中可以看到,EfficientNet系列的测试集曲线比较平稳,InceptionV3的测试集曲线有点波动。说明EfficientNet系列的预训练模型的泛化能力较强。
训练结束后,对测试集进行测试,其中EfficientNet-B3、ShuffleNetV2和InceptionV3网络的测试结果如下所示。可以看到,EfficientNet-B3准确率非常高,601个图像,推理结果只错了1个。InceptionV3推理能力也非常不错,ShuffleNetV2相对来说推理能力弱了一点。
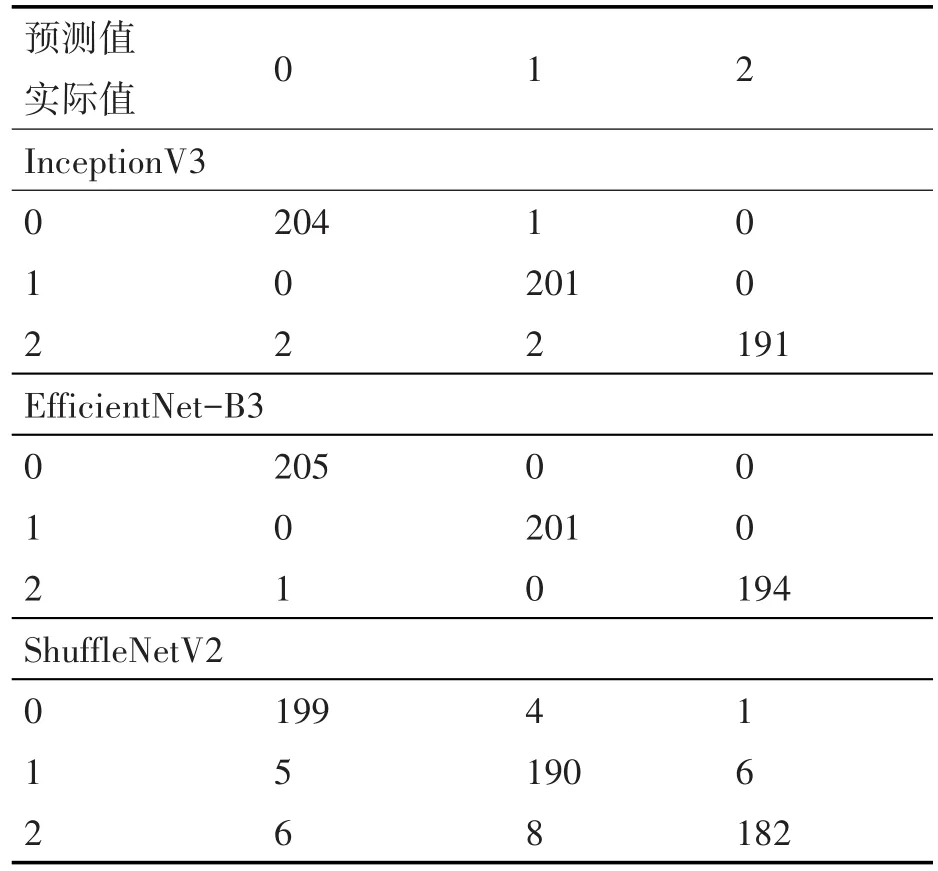
表2 InceptionV3的测试结果
各个网络的参数量、计算复杂度及测试集的准确率如表所示。可以看到,参数量较大的网络都取得很不错的准确率。参数量较小的网络Shuffle-NetV2与其他网络相比,仍有差距。
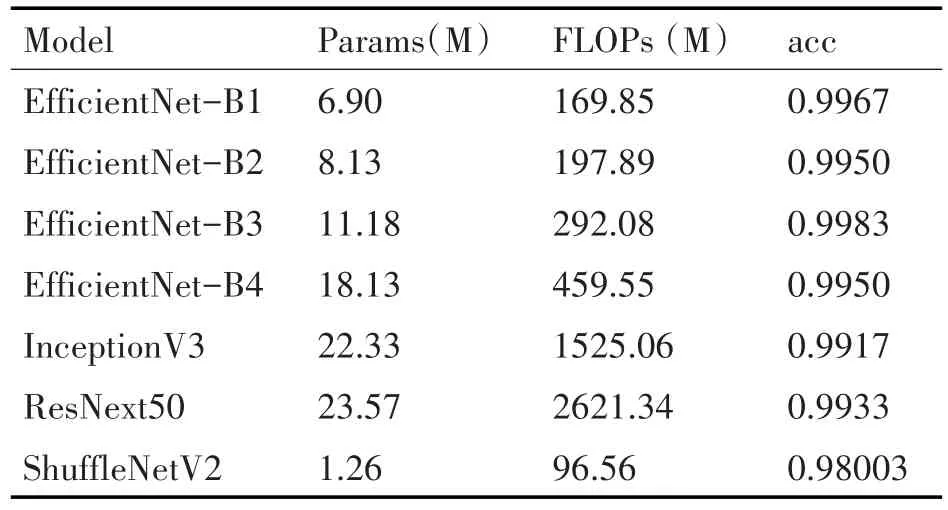
表3 InceptionV3的测试结果
总的来说,迁移学习省时省力,而且能得到很不错的结果。但是同时也受预训练模型的限制,网络模型固定,在部署到移动设备时比较不方便。所以重新设计网络模型,进行自我训练就显得尤为重要。
5.2 轻量化模型训练
本文网络进行训练时,优化算法采用可以自适应的Adam算法;初始学习率设置为0.0008,然后采用可变学习率,每20个epoch学习率减小一半;损失函数采用交叉损失熵;Batchsize设置为32;epoch数量设置为200;每个epoch迭代300次;每次epoch开始的时候,对训练数据进行打乱。
训练曲线如图10所示。

图10 训练曲线
从图10中可以看到,在迭代训练100次以后,训练的准确率接近100%,损失也接近0。同样的,在迭代训练100次以后,测试集的准确率接近99%,损失趋近0.14。
训练结束后,对测试集进行测试,各个网络的测试结果如表4所示。

表4 Verysimplenet的测试结果
本文方法得到的混淆矩阵见表2。分类错误数量为8个,正确数量为593。准确率达到98.67%。
计算复杂度方面,本文网络参数量为0.899M,
本文网络模型的性能与其他网络模型的比较见图11。从中可以看到,本文模型参数量较少,而且取得较不错的测试结果,在移动设备部署中具有很不错的优势。
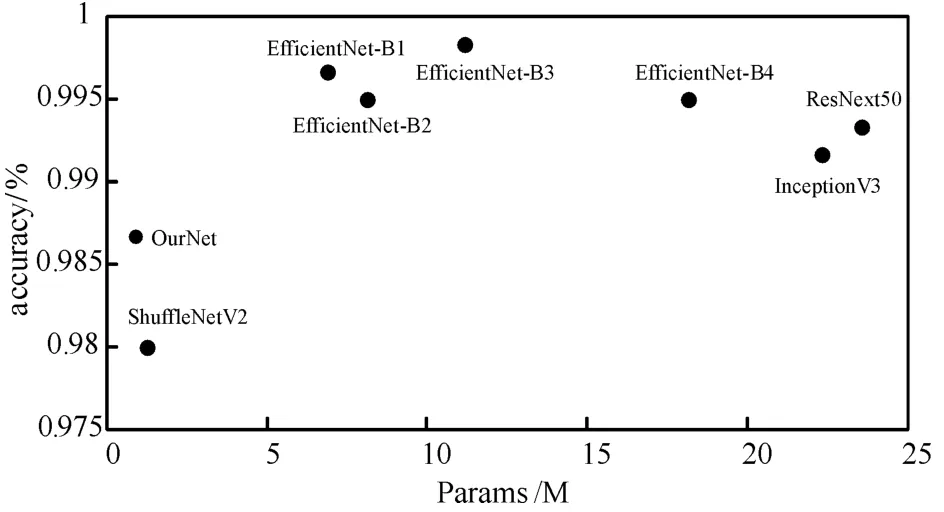
图11 与迁移学习的性能比较
6 结语
本文研究了水下光学图像的分类识别方法。从迁移学习与自我设计的网络两个方面出发,都取得了不错的目标分类结果。总地来说,迁移学习省时省力,而且能得到很不错的结果。但是受预训练模型的限制,在部署到移动设备时比较不方便。轻量化设计的网络比较灵活,可以控制参数量,而且在小数据集的训练方面,小网络适应性更好,泛化能力也比较强。
猜你喜欢
农业工程学报(2022年12期)2022-09-09
华文教学与研究(2022年1期)2022-04-27
计算技术与自动化(2022年1期)2022-04-15
汽车工程学报(2022年1期)2022-02-20
健康之家(2021年19期)2021-05-23
健康之家(2021年19期)2021-05-23
医学食疗与健康(2021年27期)2021-05-13
健康体检与管理(2021年10期)2021-01-03
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
上海师范大学学报·自然科学版(2019年5期)2019-12-13
