
一种动平台下导引头伺服稳定平台自检方法*
2022-11-09 07:27马俊安吴建刚高玉文杨红霞刘璐雅
舰船电子工程 2022年8期
马俊安 吴建刚 高玉文 杨红霞 刘璐雅
(四川航天燎原科技有限公司 成都 610100)
1 引言
导引头是精确制导武器的核心设备之一,用来完成对目标的自主搜索识别和跟踪,并给出制导律所需要的控制信号[1],作为导引头重要组成部分的伺服稳定平台,应具有有效的故障自检和故障定位能力,且自检功能需方便、快捷、准确。伺服稳定平台自检功能设计的不仅要能够全面覆盖这个组成部分,还应考虑外部环境扰动的影响,所以对伺服稳定平台上电自检进行研究很有必要。
夏静萍[2]设计了角位置回路自检,被动执行主控计算机角位置指令,完成相应功能,实现平台基本功能的检查。王昊[3]设计了测角编码器的故障检测,判断故障进入驱动器保护模式。李艳红[4]在陀螺不接入情况下,提出了导引头位标器自检合格的判定方法。文献[2~4]设计的角位置自检,虽然结构清晰,功能明确,但是没有对陀螺进行检测,存在陀螺故障无法检测的情况。文献[5~8]提到研究的伺服稳定平台具备上电自检功能,但都未提及具体实现方式,而且仅限于外部静止情况下伺服稳定平台上电自检。对于移动发射外部姿态扰动情况下的伺服稳定平台自检研究较少。基于行业现状及发展需求,本文针对移动发射外部姿态扰动情况下的伺服稳定平台自检方法进行了研究。
2 系统组成及原理
伺服稳定平台上电自检用于伺服控制器、电机驱动器、陀螺、角度传感器等部件进行检测,采用两环控制方案,即有陀螺速度环,角度位置环两个回路组成,组成框图如图1所示。
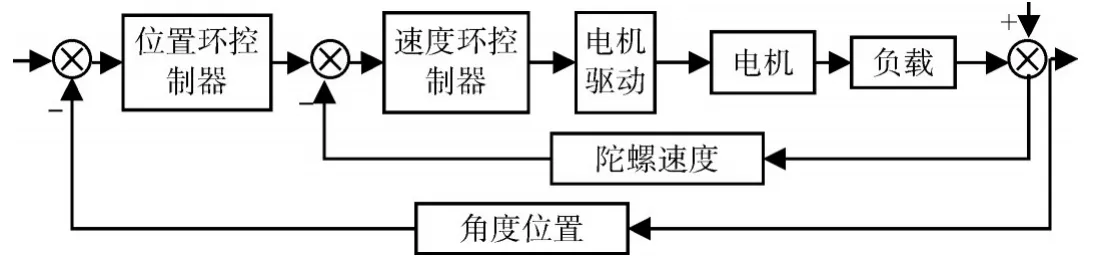
图1 伺服稳定平台组成原理框图
系统工作原理为上电后自动进入自检流程,在规定时间内运动到极限位置并回到零位,上报自检正常,否则自检超时异常。
3 单速度环自检分析
将伺服稳定平台的伺服控制器、电机驱动器、陀螺、角度传感器等部件用传递函数表示,伺服稳定平台结构框图如图2所示。
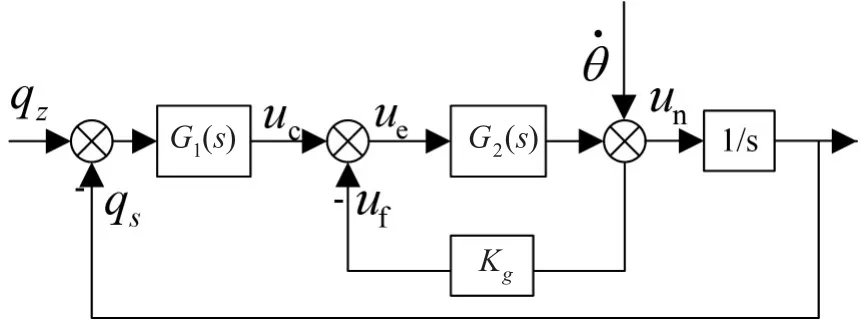
图2 伺服稳定平台单速度环结构框图
图2中,qz为目标角;qs为伺服稳定平台框架角;为弹体扰动角速度;G1(s)为位置回路传递函数;G2(s)为速度回路传递函数,Kg为陀螺反馈通道比例系数。uf为速度环反馈速度,uc为控制速度,un为伺服稳定平台运动速度。
根据图2,可得速度环反馈速度uf式(1):

速度误差ue式(2):

当速度误差ue为0时,可得式(3)

将式(1)带入式(3)中,可得式(4)

当外部平台静止时,陀螺测量速度为机构的运动速度,起测速机的功能,机构运动速度按照给定速度进行运动。
当外部平台运动时,陀螺测量速度为机构运动和外部平台运动的合成速度,即惯性空间速度。当外部运动速度方向与给定速度反向时,机构运动速度会加快,伺服稳定平台自检时间减少。当外部运动速度方向与给定速度同向时,机构运动速度会减慢;伺服稳定平台自检时间增大,超过自检规定时间造成上电自检异常。
4 平台扰动情况下自检设计
针对移动发射姿态扰动情况下导引头伺服稳定平台单速度环自检超时现象,采用双速度环闭环控制,根据机构运动速度un大小进行切换,伺服稳定平台双速度环结构框图如图3所示。
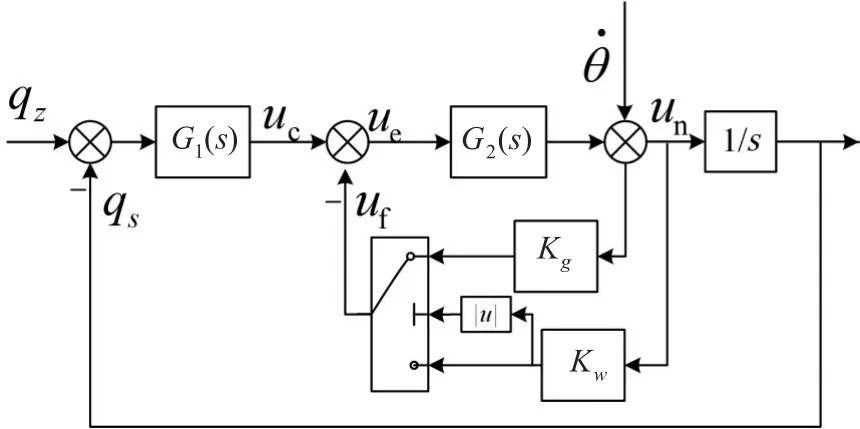
图3 伺服稳定平台双速度环结构框图
图3中,qz为目标角;qs为伺服稳定平台框架角;为弹体扰动角速度;G1(s)为位置回路传递函数;G2(s)为速度回路传递函数,Kg为陀螺反馈通道比例系数,Kw为角度微分反馈通道比例系数。uf为速度环反馈速度,uc为控制速度,un为伺服稳定平台运动速度。
当伺服稳定平台运动速度|un|小于等于10°/s时速度回路采用微分速度进行闭环,否则速度回路采用陀螺速度进行闭环。
根据图3,可得速度环反馈速度uf式(5):

将式(5)带入式(3)中,可得式(6)

当外部平台静止时,速度环反馈速度为机构的运动速度,机构运动速度按照给定速度进行运动。
当外部平台运动时,当外部运动速度方向与给定速度同向时,机构运动速度会减慢,当小于等于10°/s时速度回路采用微分速度进行闭环,速度环反馈速度为机构的运动速度,机构运动速度按照给定速度进行运动,不受平台扰动干扰,保证平台扰动情况下上电自检正常。
5 软件设计
根据设定好的自检流程,控制电机带动负载转动极限位置并回到零位,如果在规定的时间内完成自检,则上报自检正常,否则上报故障,中止后续流程,系统处于刹车保护状态,流程图如图4所示。
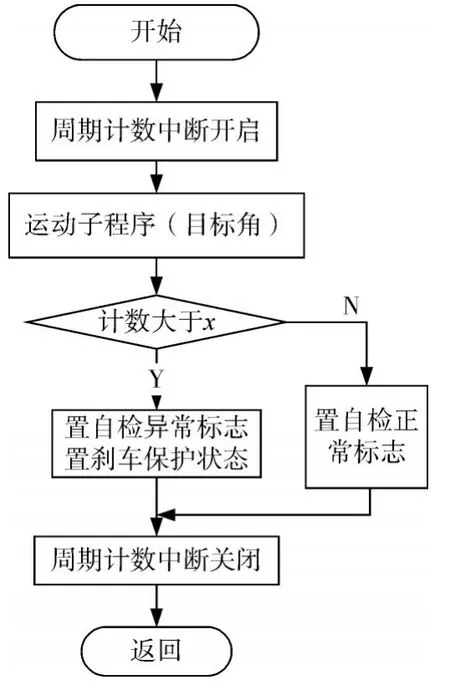
图4 自检流程图
运动子程序流程图如5所示,速度环控制器和位置环控制器均采样PID控制,速度环采样时间采样0.5ms,位置环采样时间采用5ms。速度控制器输入采用陀螺速度和位置微分速度自动切换,切换条件为位置微分速度小于等于10°/s时采用微分速度进行闭环,大于10°/s采用陀螺速度进行闭环。
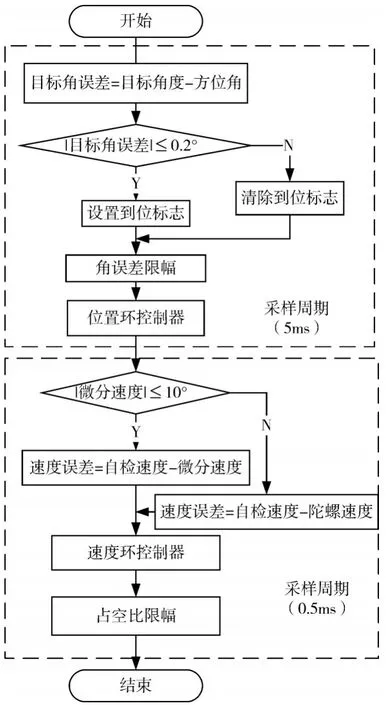
图5 运动子程序流程图
6 试验测试
6.1 搭建测试系统
搭建的测试系统示意图如图6所示,包括上位机、伺服控制器和电机驱动器以及执行机构,其中,执行机构安装在三轴转台上,上位机为我所成熟软件,具有数据存储功能,可将数据导出用于分析。测试用伺服稳定平台俯仰角度下极限为-42°,上极限为14°,自检状态用bit位表示:0为正常、1为异常。

图6 测试系统示意图
6.2 单速度环自检测试
采用陀螺单速度闭环方式,控制三轴转台以10°/s的速度向上运动的同时,伺服稳定平台进行上电自检,记录俯仰角度数据和自检状态如图7所示。
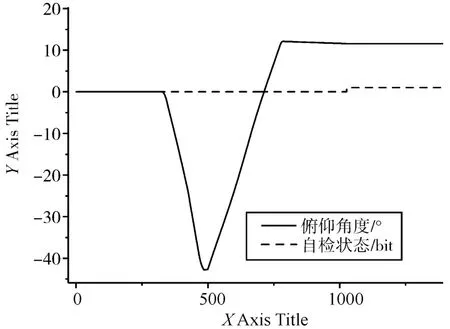
图7 平台扰动情况下单速度环自检数据图
从图7数据分析,俯仰角度到达下极限(-42°)后,向上极限过程中12°附近保持不动,不能到达上极限(14°),自检状态异常(1),自检失败。
6.3 双速度环自检测试
采用双速度闭环方式,控制三轴转台以10°/s的速度向上运动的同时,伺服稳定平台进行上电自检,记录俯仰角度数据和自检状态如图8所示。
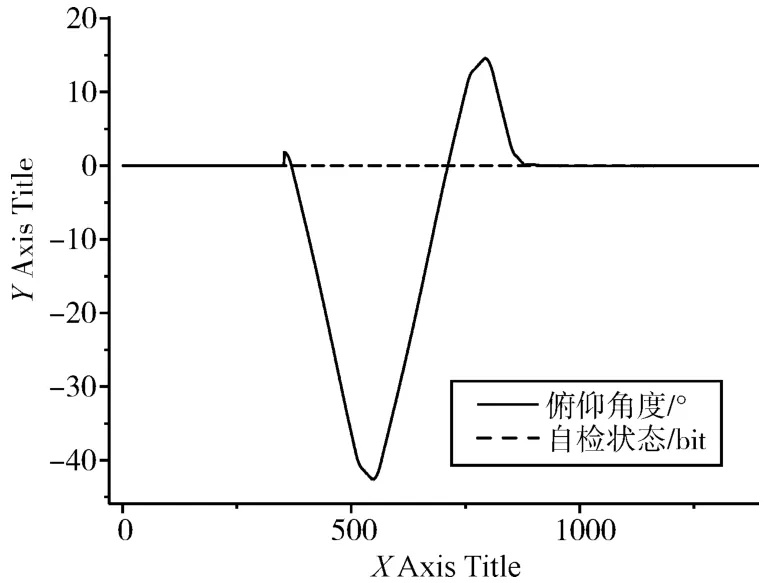
图8 平台扰动情况下双速度环自检数据图
从图8数据分析,俯仰角度先后到达下极限(-42°)、上极限(14°)、0°位置,自检状态正常(0),完成自检流程。
7 结语
为了适应了移动发射姿态扰动情况下上电自检需求,设计一种动平台下导引头伺服稳定平台自检方法。通过对单速度环自检的分析,得到动平台下自检超时的原因,提出采用陀螺速度和位置微分速度自动切换的闭环的双速度环方式,实验结果表明,该方式在移动发射姿态扰动情况下上电自检功能可靠和稳定,为工程实现提供了技术支撑。
猜你喜欢
教育周报·教研版(2022年12期)2022-05-10
都市生活(2019年6期)2019-08-07
商情(2019年9期)2019-04-01
科学与财富(2018年26期)2018-10-24
航空兵器(2018年1期)2018-04-09
成长·读写月刊(2018年1期)2018-01-15
中学生数理化·高一版(2017年1期)2017-04-25
考试周刊(2016年44期)2016-06-21
软件导刊(2015年8期)2015-09-18
电子技术与软件工程(2015年6期)2015-04-20
