
导引头伺服控制器国产化设计与应用验证*
2022-11-09 07:27吴建刚高玉文刘璐雅马俊安
舰船电子工程 2022年8期
吴建刚 高玉文 刘璐雅 马俊安
(四川航天燎原科技有限公司科研事业部 成都 610100)
1 引言
我国航天型号关键元器件自主保障的形势已十分严峻。我国航天的飞速发展使得关键元器件依赖进口与国外对元器件严格控制之间的矛盾更为突出[1]。随着国际环境的紧张,欧美等国对我国实施关键元器件的禁运,严重影响了航天工程的进度,并在战时可能成为制约我军战斗力的决定性因素[2]。电子元器件是武器装备研制、生产和使用的战略物质基础,因此电子元器件国产化意义重大[3]。
导引头是精确制导武器的核心,负责跟踪目标并输出制导信号,并控制导弹命中目标,是制导控制系统最关键的分系统[4]。其中,伺服系统是导引头实现对目标捕获、跟踪的重要分机,是实现弹载雷达导引头国产化和低成本化的重要设计环节。文献[5~7]设计的DSP+FPGA架构的伺服控制器,但架构设计复杂,电源种类多,国产化替代难度大成本高。文献[8~9]设计了单DSP小型化控制器,但仅限于一维伺服系统,无法扩展到导引头二维伺服系统且所选器件均为进口器件。
目前,尚未有公开文献介绍用于导引头的集成化全国产伺服控制驱动器(以下简称“控制驱动器”)的设计方案,所以,本文主要介绍用于导引头全国产伺服控制器的集成化设计方案并阐述了子系统级应用验证的必要性及验证情况。
2 全国产集成化伺服控制器控制架构
为了实现控制驱动器的小型化、全国产和低成本,采用基于SCI外设扩展的单DSP控制架构。新架构下,集成化控制驱动器组成框图如图1,主要包括供电模块、DSP模块、光耦隔离模块及电机驱动模块。该控制架构充分利用了DSP丰富的中断资源和外设SCI串口资源,与上位机、角度传感器和角速度传感器之间均采用RS422差分串口进行数据交互,精简了FPGA及外围配置电路。
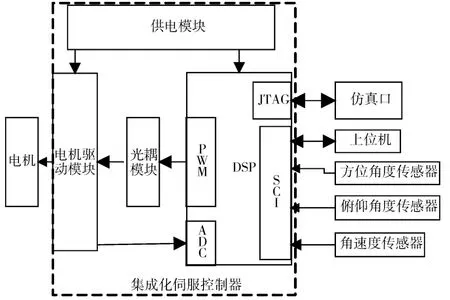
图1 全国产控制驱动器组成框图
工作原理为控制驱动器接收到上位机下发的指令后,进入相应的控制流程,经过DSP运算后输出控制信号到电机驱动模块,经放大后驱动电机带动负载按要求转动,角度和角速度传感器分别实时反馈角度和角速度信号到DSP,参与系统闭环控制。
3 控制驱动器国产化设计
由于电阻、电容、电感以及接口芯片等国产器件均已成熟,所以,本文主要介绍控制驱动器的供电模块、DSP模块、光耦隔离模块及电机驱动模块的核心器件的国产化设计。
3.1 供电模块
28V单电源输入后分两路传输,一路经滤波后直接为电机驱动芯片供电,一路经DC-DC模块隔离降压后传输至后级低压电源转换芯片,转换后为DSP、晶振、接口芯片等负载供电。电源转换芯片选用国产JCER4644B,可同时支持4路电压输出,该芯片主要参数见表1,电路图如图2。
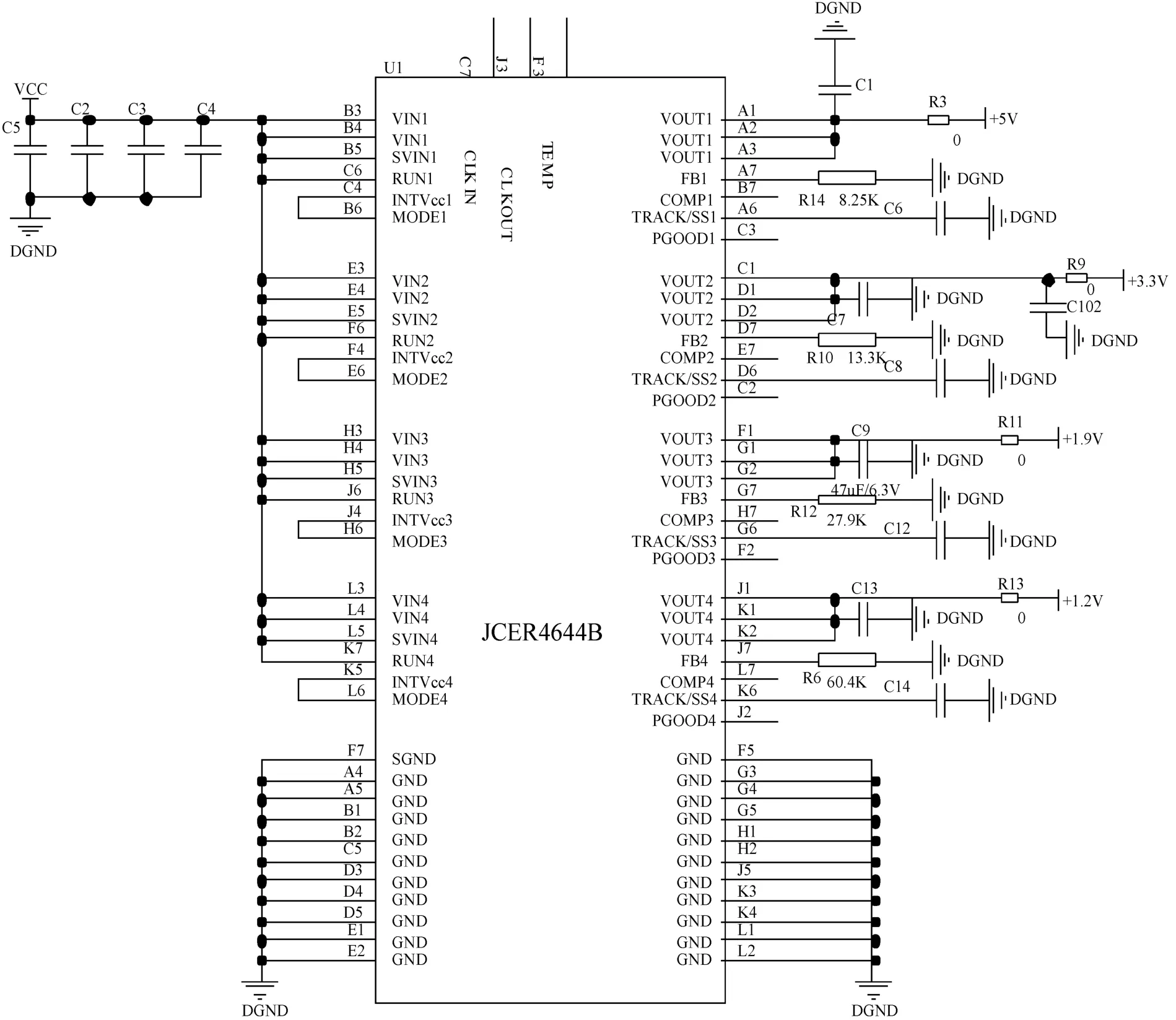
图2 电源转换芯片应用电路
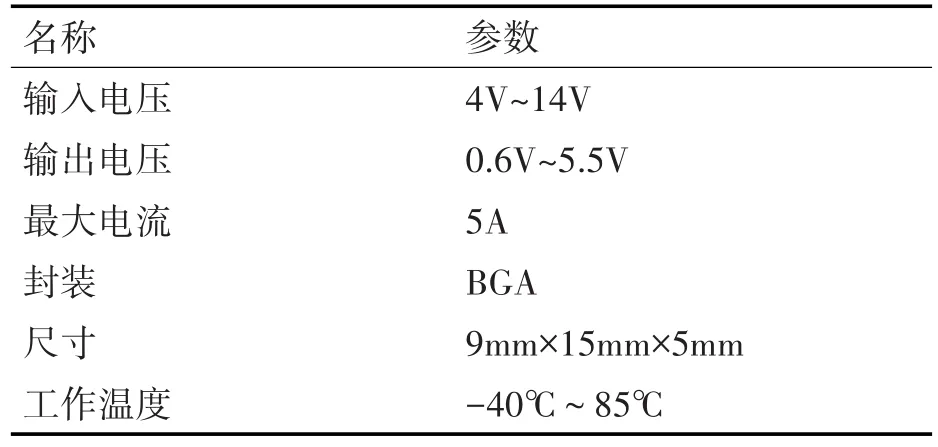
表1 JCER4644B主要参数表
3.2 DSP模块
DSP选用国产LSC335,该器件是32位浮点控制处理器,芯片主要参数见表2,用到的主要功能包括PWM、SCI、ADC和中断资源,对外连接包括光耦模块、上位机、方位角度传感器、俯仰角度传感器、速度传感器和电流采样模块等,原理框图如图3。为了实现控制驱动器的小型化和低成本,采用了基于SCI外设扩展的单DSP控制架构[10],精简了FPGA及外围电路。
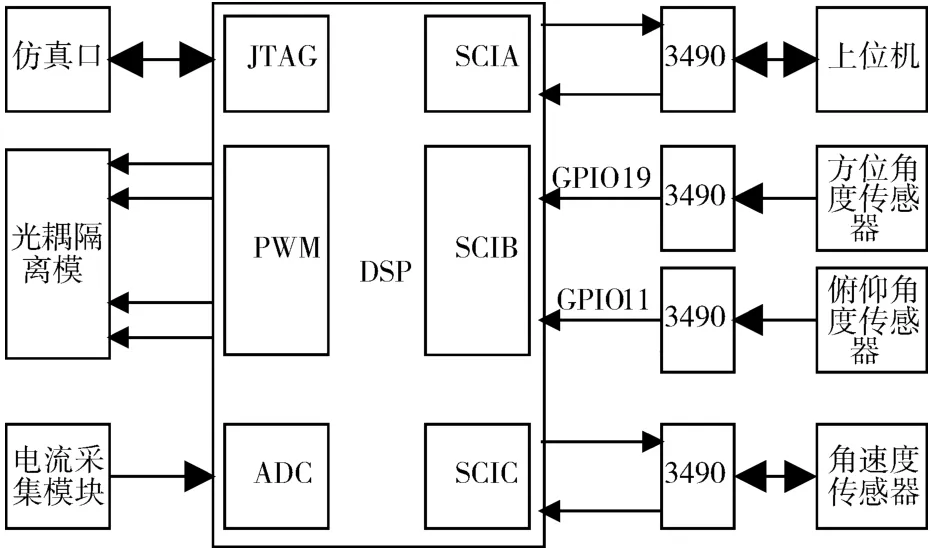
图3 DSP应用电路原理框图
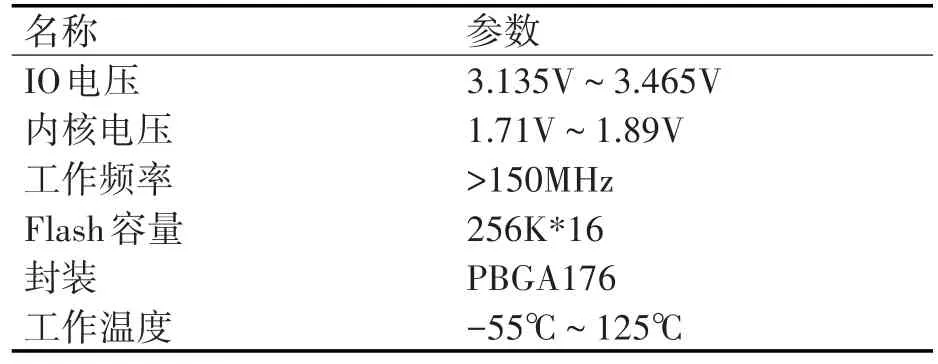
表2 LSC335参数表
3.3 光耦模块
光耦模块主要用于将低电压控制信号与高电压强电流信号从电气上隔离,光耦选用国产GH0631J,主要参数见表3,电路图如图4。
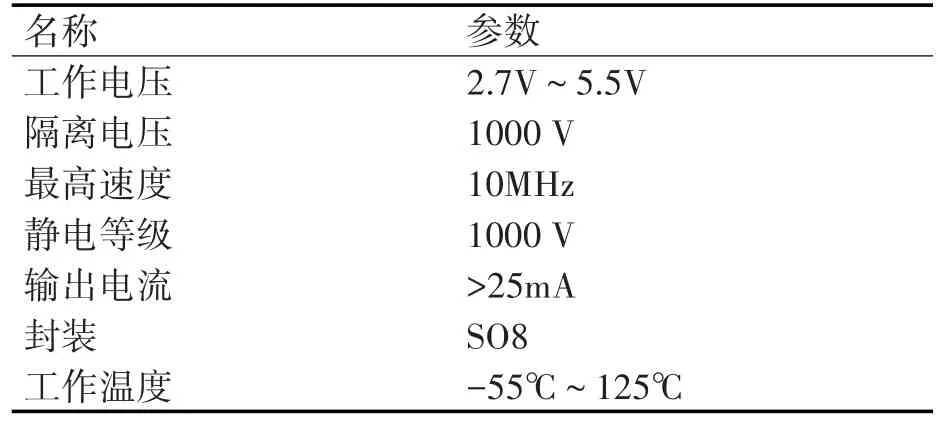
表3 GH0631J主要参数表
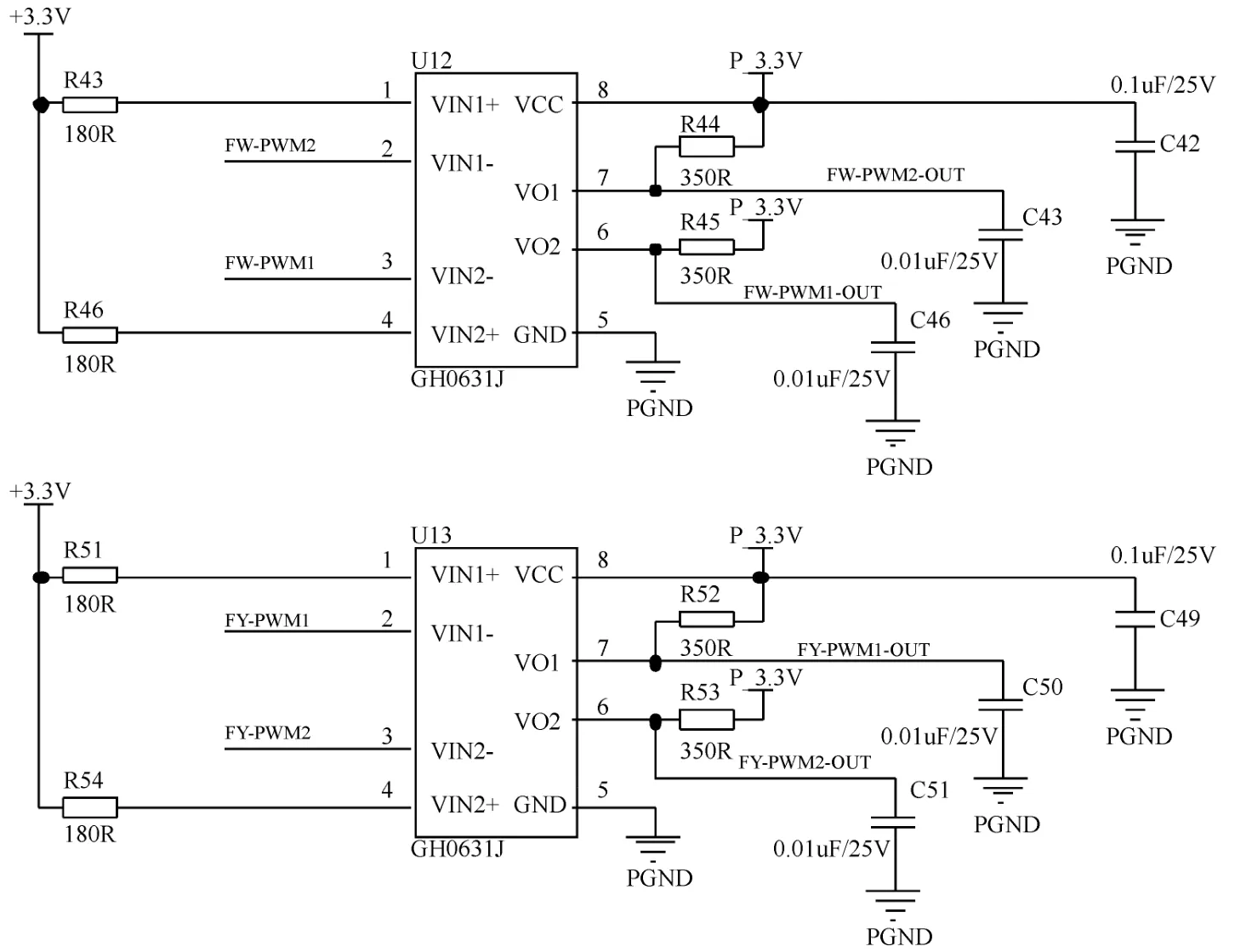
图4 光耦隔离电路
3.4 电机驱动模块
电机驱动模块以电机驱动芯片FX8841为主体开展设计。FX8841是新一代电机逻辑驱动芯片,效率高达97%,内部包括MOS管构成的H桥及其逻辑控制电路,输入信号兼容TTL和CMOS,内嵌过流保护、短路保护、欠压保护、过温保护等功能,可驱动两个直流电机,主要参数见表4。由于该芯片具有效率高、封装小和可靠性高的优点,使其在小型化导引头伺服控制领域更具应用优势,非常适合小型化导引头二维控制驱动器应用,应用电路如图5。
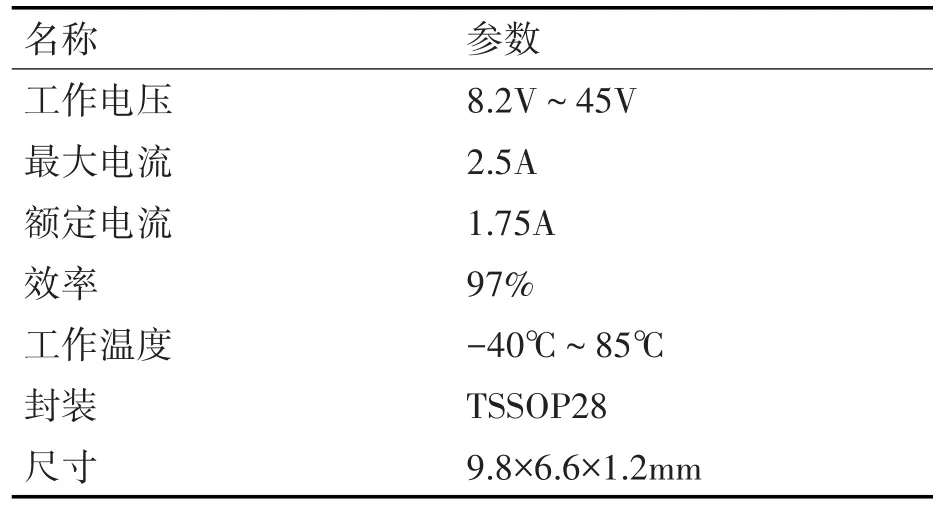
表4 FX8841主要参数表
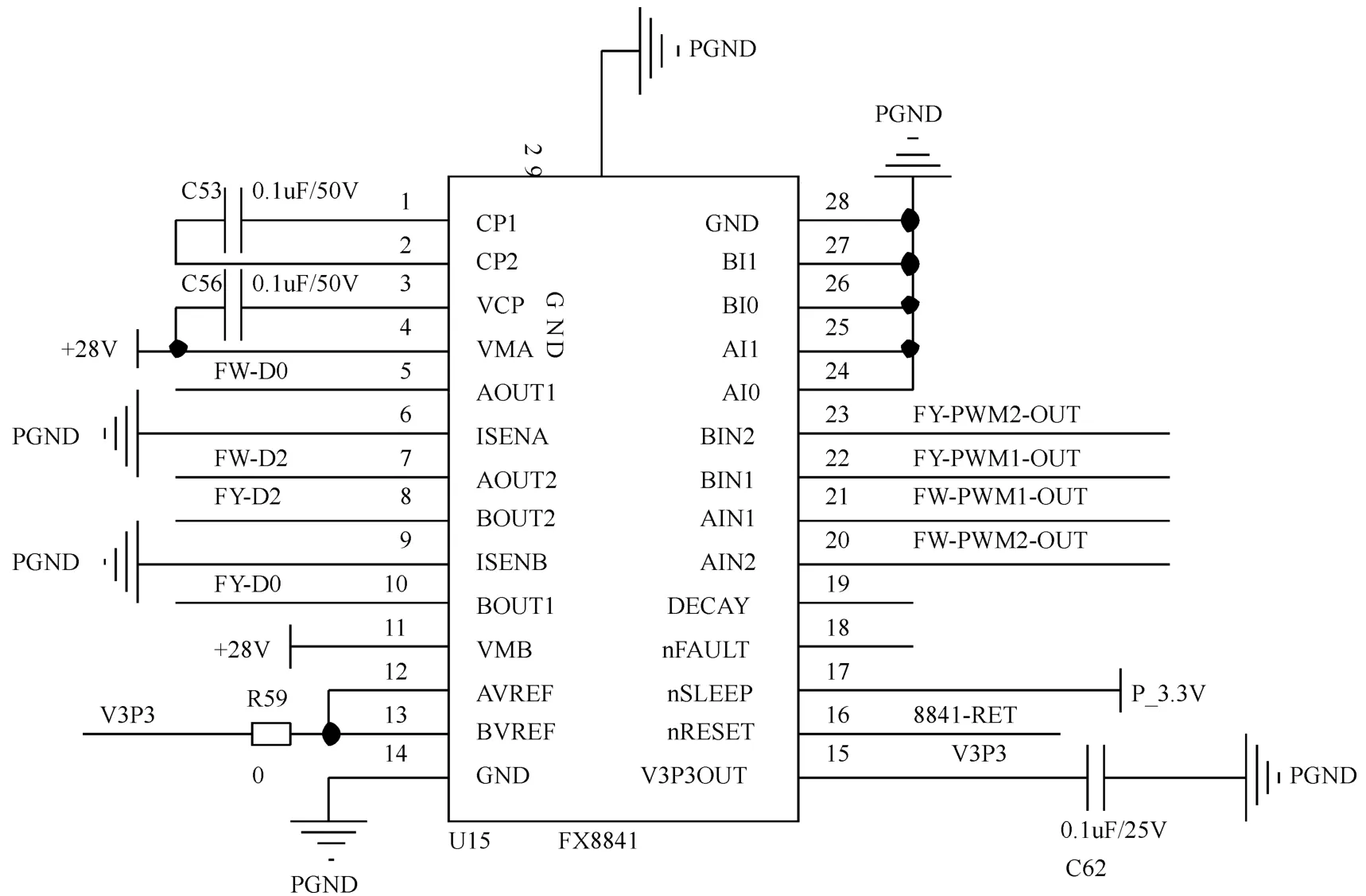
图5 电机驱动模块电路
4 应用验证
4.1 子系统级应用验证的必要性
应用验证是对元器件在型号工程应用前开展的一系列的试验、评估和综合评价等工作[11]。元器件采用分级验证已达成共识[12~14],即器件级、组件级(子系统级)、系统级。随着国家在芯片国产化研制方面政策扶持力度的加大,国内涌现出了一大批芯片研制厂商,芯片的国产化研制已从最初的部分高端卡脖子芯片向全产业链延生,使得近两年国产化芯片产出种类和数量成倍增长。而专业的第三方鉴定单位极少,验证订单早已饱和,为了提高芯片应用进程,部分芯片研制单位在开展新研器件应用验证工作时,仅完成要求的例行试验,未对新研器件开展典型覆盖性应用验证,导致器件在型号应用过程中陆续暴露各种缺陷。所以,本文提出,在采取分层级验证的框架下,在器件级验证中后期,组件级或子系统级的应用验证应提前介入,协同开展国产化器件的验证工作。一方面可以覆盖芯片实际的使用环境,另一方面可以加快国产化元器件的应用进程。
4.2 子系统级应用验证情况
以上提供的全国产集成控制驱动器在子系统级已进行了三轮验证测试,包括子系统级环境试验。验证过程发现并反馈DSP厂家包括低温偶发引导不起、不同软件版本和不同仿真器的烧写问题以及低温串口波特率设计缺陷等问题。厂家针对反馈的问题及时优化改进,经双方的协作验证,经一年多时间,芯片已趋于稳定。其它国产器在验证过程中尚未出现问题。
验证过程中搭建的测试系统示意图如图6所示,包括上位机、集成控制驱动器以及执行机构,其中,执行机构是成熟测试工装,上位机为我所成熟软件,具有数据存储功能,可将数据导出用于分析。
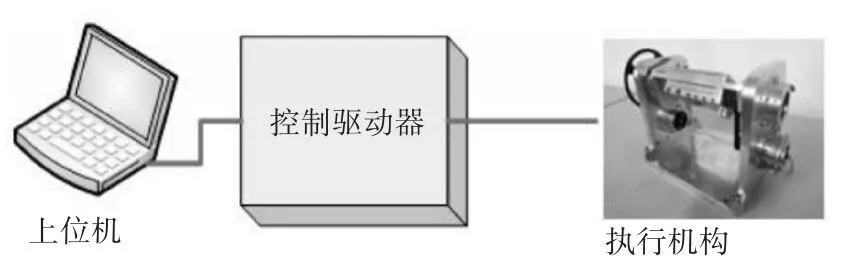
图6 测试系统示意图
按要求完成了多组温循试验(高温+60℃,低温-40℃),试验过程按要求进行测试,高低温环境下,各流程正常工作,数据平滑连续无畸点。高低温部分数据截图如图7~8所示。测试数据表明,该控制驱动器工作稳定可靠,适用于导引头伺服系统工作环境。
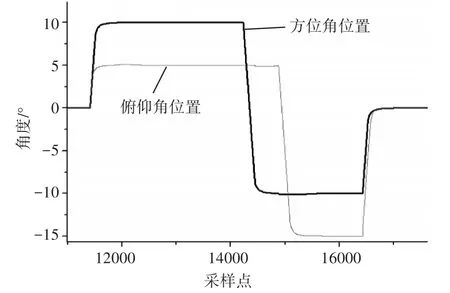
图7 高温装订流程数据曲线
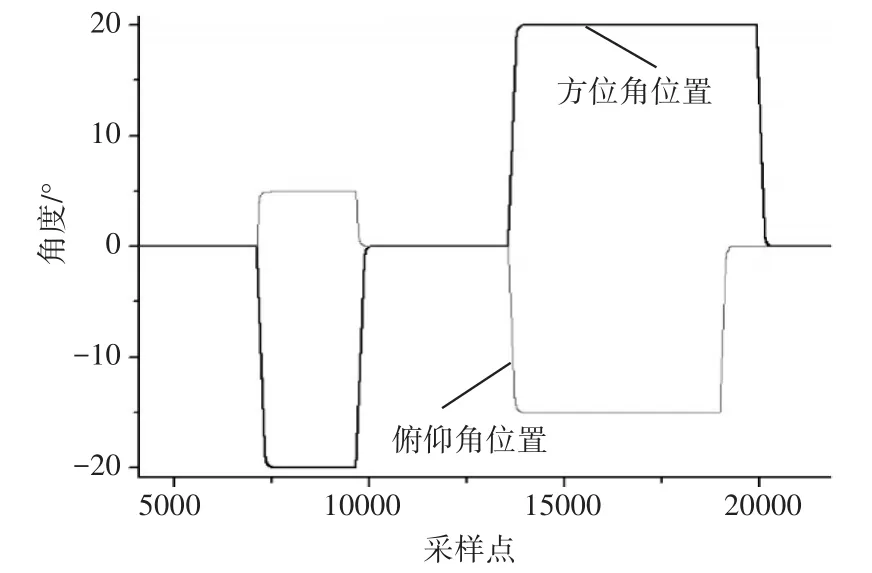
图8 低温装订流程数据曲线
5 结语
设计开发了一款用于导引头的全国产化控制驱动器,介绍了全国产化导引头控制驱动器的控制架构,核心元器件的国产化替代选型以及硬件电路设计。阐述了子系统级应用验证的必要性,通过子系统级和元器件级的协同验证,提高了元器件的试验覆盖性,加快了国产元器件的工程化应用进程,对后续型号导引头产品全国产化控制驱动器的研制应用提供了有效的技术途径。
猜你喜欢
航天工业管理(2022年4期)2022-05-21
航天制造技术(2022年1期)2022-03-07
载人航天(2021年3期)2021-07-09
电脑爱好者(2020年6期)2020-05-26
电脑爱好者(2019年15期)2019-10-30
科学与财富(2018年26期)2018-10-24
航空兵器(2018年1期)2018-04-09
中国信息化周报(2017年4期)2017-03-23
软件导刊(2015年8期)2015-09-18
电子技术与软件工程(2015年6期)2015-04-20
