
面向降载的漂浮式海上风机变桨距控制技术
2022-11-08 07:15陈殿辉徐曼如洪炫宇李建国
上海电机学院学报 2022年5期
陈殿辉, 徐曼如, 朱 政, 洪炫宇, 李建国
(1.上海电机学院 电气学院, 上海 201306;2.国网上海奉贤供电公司, 上海 201400;3.三峡新能源海上风电运维江苏有限公司 大丰项目部, 江苏 盐城 224008)
为顺应新时代背景下“碳达峰、碳中和”的目标,我国能源结构将发生改变[1],新能源发电发展迅速,而风电逐步成为新能源发电的主力军。近年来,陆上风电不断开发,陆上可利用风资源逐渐减少,拥有较好发展前景的海上风电已成为我国风电行业发展的重心[2]。2020年7月,我国首台海上漂浮式风电平台——“三峡引领”号在广东阳江成功安装,这表明我国海上风电开始向深海化发展[3]。
和近海(水深<50 m)相比,深海(水深>50 m)拥有更好的风资源,更利于发展海上风电。相较于在深海安装固定式海上风机,漂浮式海上风机的成本更低,但面临的载荷环境更复杂。目前,国内外部分学者对风机独立变桨距控制开展了相关研究。曹松青等[4]设计了一种非线性预测控制和PID 控制相结合的独立变桨距控制技术,该独立变桨距控制技术能有效解决系统的内外扰动。曾凌霄等[5]基于600 k W 水平轴海流能风机设计了一种变桨系统,该系统不仅保证了功率稳定,还能显著降低叶轮受到的不平衡载荷。闫学勤等[6]提出了一种基于科尔曼坐标变换的改进型准比例积分谐振独立变桨距控制算法,该独立变桨距控制算法对机组输出的有功功率无冲击影响。曾冰等[7]提出了一种基于鲸鱼群算法的PID独立变桨距参数整定方法,该方法能优化控制器的参数。Gong等[8]将模糊PID和混沌算法结合,设计了一种独立变桨控制器,研究发现该控制器的性能较好。周腊吾等[9]提出了一种基于径向基函数神经网络的独立变桨距控制技术,结果表明,该独立变桨距控制技术能优化漂浮式海上风机的发电功率。刘杨等[10]提出了一种基于改进微分进化算法的兆瓦级风机独立变桨距控制技术,研究发现该独立变桨距控制技术缩小了PID 参数的搜索范围,有效稳定了输出功率。
目前,国内外大多数学者对漂浮式海上风机降载的研究侧重于通过优化浮式平台结构降低平台受到的载荷,对独立变桨距控制技术的研究侧重于优化陆上风机和海上固定式风机的发电功率,对独立变桨距控制技术下漂浮式海上风机的平台垂荡运动和叶尖位移引起的载荷变化的相关研究较少。本文采用OpenFAST软件对漂浮式海上风机系统建模,针对漂浮式海上风机面临的复杂海况,提出一种基于卡尔曼滤波算法的改进单神经元PI独立变桨距控制技术。对比PI统一变桨距和方位角权系数独立变桨距控制技术,分析了在本文提出的独立变桨距控制技术下漂浮式海上风机的平台垂荡运动和叶尖位移的振幅变化。仿真结果表明:本文提出的独立变桨距控制技术缓解了浮式平台的垂荡运动,减少了叶尖位移的振幅,在一定程度上降低了漂浮式海上风机受到的载荷。
1 气动 水动 系泊系统模型
半潜式漂浮式海上风机由1个中央圆筒和3个浮筒构成,该类型漂浮式海上风机安装难度较小[11]。漂浮式海上风机大多安装在深海区域,面临的载荷环境十分复杂,导致漂浮式海上风机的系统模型呈现强耦合的特点,漂浮式海上风机的系统动力学模型主要包括气动、水动和系泊模型。图1为半潜式漂浮式海上风机。

图1 半潜式漂浮式海上风机
1.1 气动模型
漂浮式海上风机平台共有6个自由度运动,其中包括X、Y、Z3 个方向的平动自由度为纵荡(Surge)、横荡(Sway)、垂荡(Heave),以及3个转动自由度为纵摇(Pitch)、横摇(Roll)、艏摇(Yaw)。图2为漂浮式海上风机平台自由度运动。
1.1.1 气动载荷(风轮) 漂浮式海上风机的气动载荷主要源于风轮受到的轴向力和风轮转矩[12],通过叶素 动量理论对漂浮式海上风机的叶片进行假设切割,分成足够多的叶素。气动载荷作用在叶素上产生使叶片转动的推力T和扭矩M[13]:

式中:ρ为来流密度;W为相对来流速度;N为叶片数目;c为叶素翼型弦长;Cl、Cd分别为翼型升力和阻力系数;ϕ为入流角;r为叶片半径。
1.1.2 气动载荷(塔筒) 漂浮式海上风机塔筒的气动载荷为[14]

式中:K为平台杆件形状受力系数;H为高度系数;Sa为塔筒杆件a的受风面积;vt为塔筒处的相对风速。
1.2 水动模型
1.2.1 水动载荷(海流) 在海洋工程中,一般将深海区域的海流速度视为线性变化,漂浮式海上风机受到的海流力为

式中:ρow 为海水密度;Koc为曳力系数;Splat为平台和海流垂面的投影面积;voc为海流流速。
1.2.2 水动载荷(波浪) 在海洋工程中,常采用莫里森(Morison)方程计算浪载荷[15]。漂浮式海上风机受到的波浪力Fwa为拖曳力Ft和惯性力Fg之和,拖曳力和惯性力的表达式为
式中:Kt为拖曳力系数;S为浮筒垂于海水流动方向的投影面积;v为海水的瞬时流速;D为构件直径;̇v为流体瞬时加速度的水平分量;Kg为惯性力系数。
1.3 系泊系统模型
通常采用静态悬链线方程计算漂浮式海上风机系泊系统的系泊力,该方程中系泊点处的系泊力水平分量Fxs和垂直分量Fxc分别表示为[16]式中:X为悬链线水平跨距;l为系泊缆长度;h为锚点和系泊点间的垂直距离;ω为水中单位长度系泊缆的重力。
1.4 漂浮式海上风机运动方程
结合漂浮式海上风机的气动、水动和系泊系统,其运动方程[17]如下:
2 变桨控制器设计
2.1 统一变桨控制(Collective Pitch Control,CPC)
本文的CPC采用增益调度型PI控制,利用发电机实际转速和额定转速的转速差作为输入。该统一变桨距控制技术能在PI控制需要较大叶片桨距角时给出较小的增益,即增益同叶片桨距角的变化量成反比[18],其传递函数为[19]

式中:Kp为比例系数;F(x)为增益因子;Ti为积分时间;s为拉氏变换算子。
2.2 独立变桨控制(Individual Pitch Control,IPC)
A) 受环境载荷和叶轮面积较大等因素影响,漂浮式海上风机3个叶片受到的载荷差异较大。该控制技术根据每个叶片的受力情况进行权系数的修正,忽略叶片间的结构差异,将每只叶片中心点位置的风速等效为平均风速,经推导得到权系数为
2.2.1 方位角权系数控制技术(IPC
2.2.2 基于卡尔曼滤波算法的改进单神经元PI控制技术(IPC B)
(1) 卡尔曼滤波算法。鉴于漂浮式海上风机受环境载荷影响较大,输出常含有干扰信号。基于卡尔曼滤波算法,旨在从干扰信号中确定有效信号。该算法利用状态方程描述系统,由上段时间的估值和现在的观测值递推得到现在的状态估值为[20]
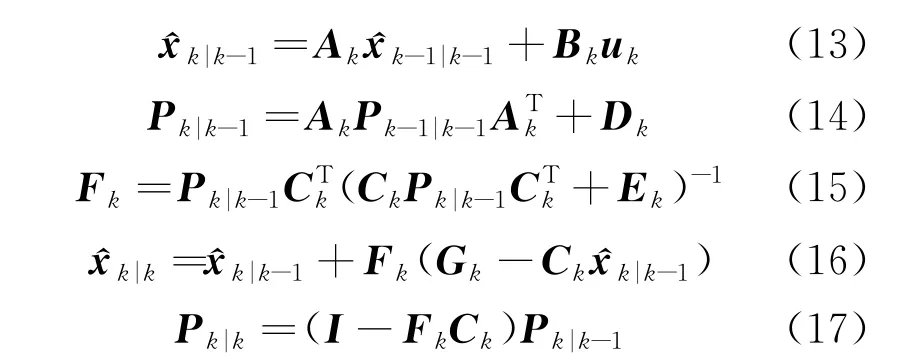
式中:x^k|k-1为k时刻的先验状态估计值;Ak、Bk、Ck均为变换矩阵;uk为控制向量;Pk|k-1为协方差矩阵;Dk为过程噪声的协方差矩阵;Fk为滤波增益矩阵;Ek为观测噪声的协方差矩阵;x^k|k为k时刻的后验状态估计值;Gk为测量值;I为单位矩阵。
(2) 改进单神经元PI控制。单神经元PI控制具有结构简单、自主学习和鲁棒性强等优点。但考虑到单神经元PI控制受e(k)和Δe(k)影响较大,本文对常规单神经元PI控制的学习规则进行改进:用e(k)+Δe(k)代替常规单神经元PI控制器中xi(k)[21]。
改进后的学习规则如下:
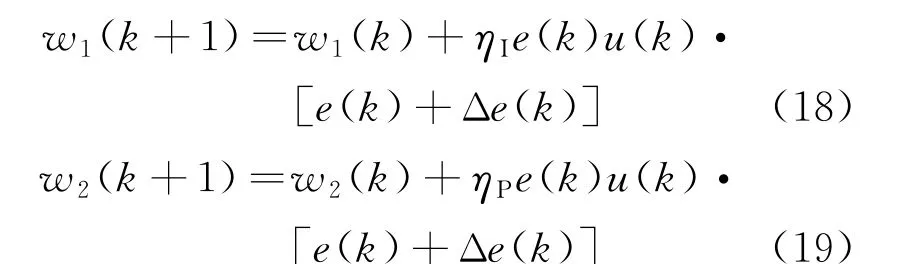
式中:w1(k)、w2(k)分别为第1和第2个神经元的连接权值;ηP、ηI 分别为比例控制和积分控制的学习速率;e(k)为k时刻的误差值;u(k)为k时刻的控制量;Δe(k)为k时刻的误差变化量。
3 仿真分析
本文以NREL-5 MW基础风机和OC4-DeepCwind漂浮式平台为研究对象,通过OpenFAST 和Matlab/Simulink联立仿真。仿真时间为200 s,设定平均风速为17 m/s的湍流风、有义波高为4 m的不规则波联合作用的运行工况。鉴于切入风速较大,本文取前100 s为瞬态部分,仅分析100~200 s的仿真结果。NREL-5 MW 风力机主要参数如表1所示,OC4-DeepCwind漂浮式风力机平台主要参数如表2所示。
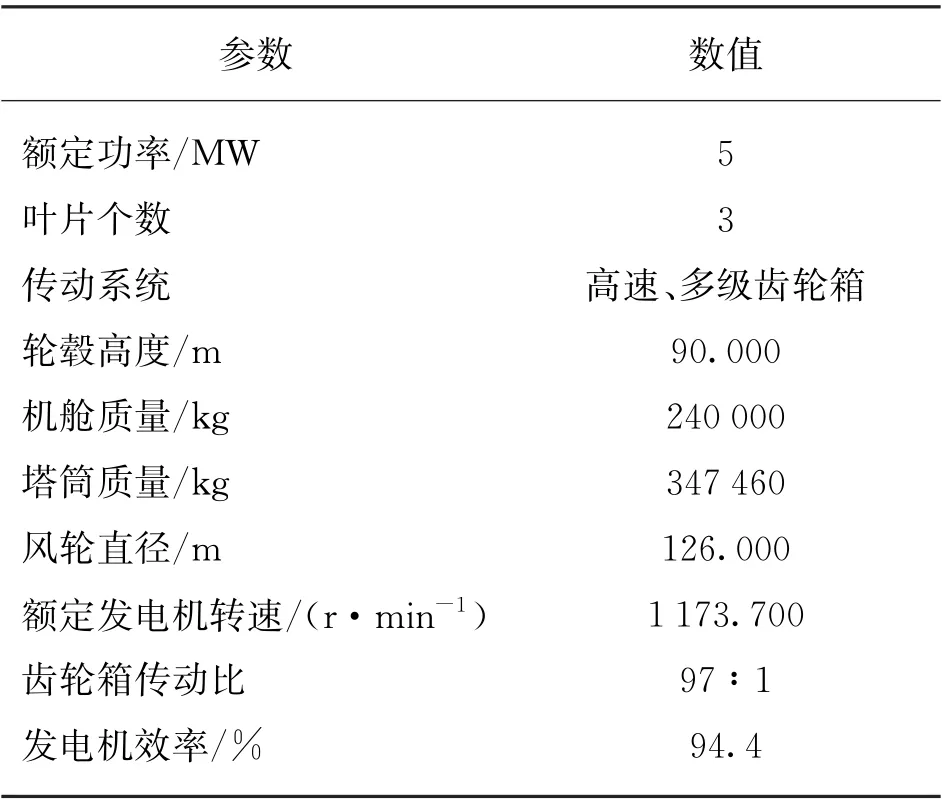
表1 NREL-5 MW 风力机主要参数
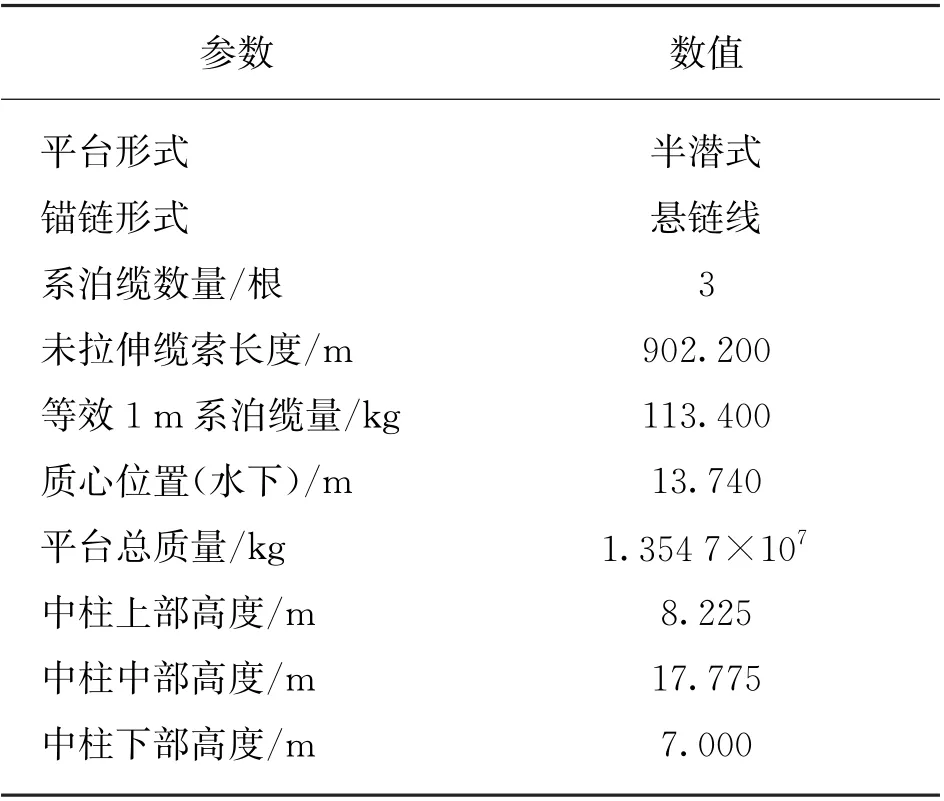
表2 OC4-DeepCwind漂浮式风力机平台主要参数
图3反映了设定的风机运行工况。由图3(a)可知,在0~200 s内,风速最大值和最小值分别为23.99 m/s和8.49 m/s;在100~200 s内,风速最大值和最小值分别为23.99 m/s和10.78 m/s,均处于机组切入、切出风速以内。生成的湍流风振荡明显,最大幅值达到13.21 m/s,一定程度上反映了湍流风对机组可靠性要求较高。由图3(b)可知,生成的不规则波浪振荡明显,一定程度上反映了浪载荷对浮式平台的可靠性要求较高。
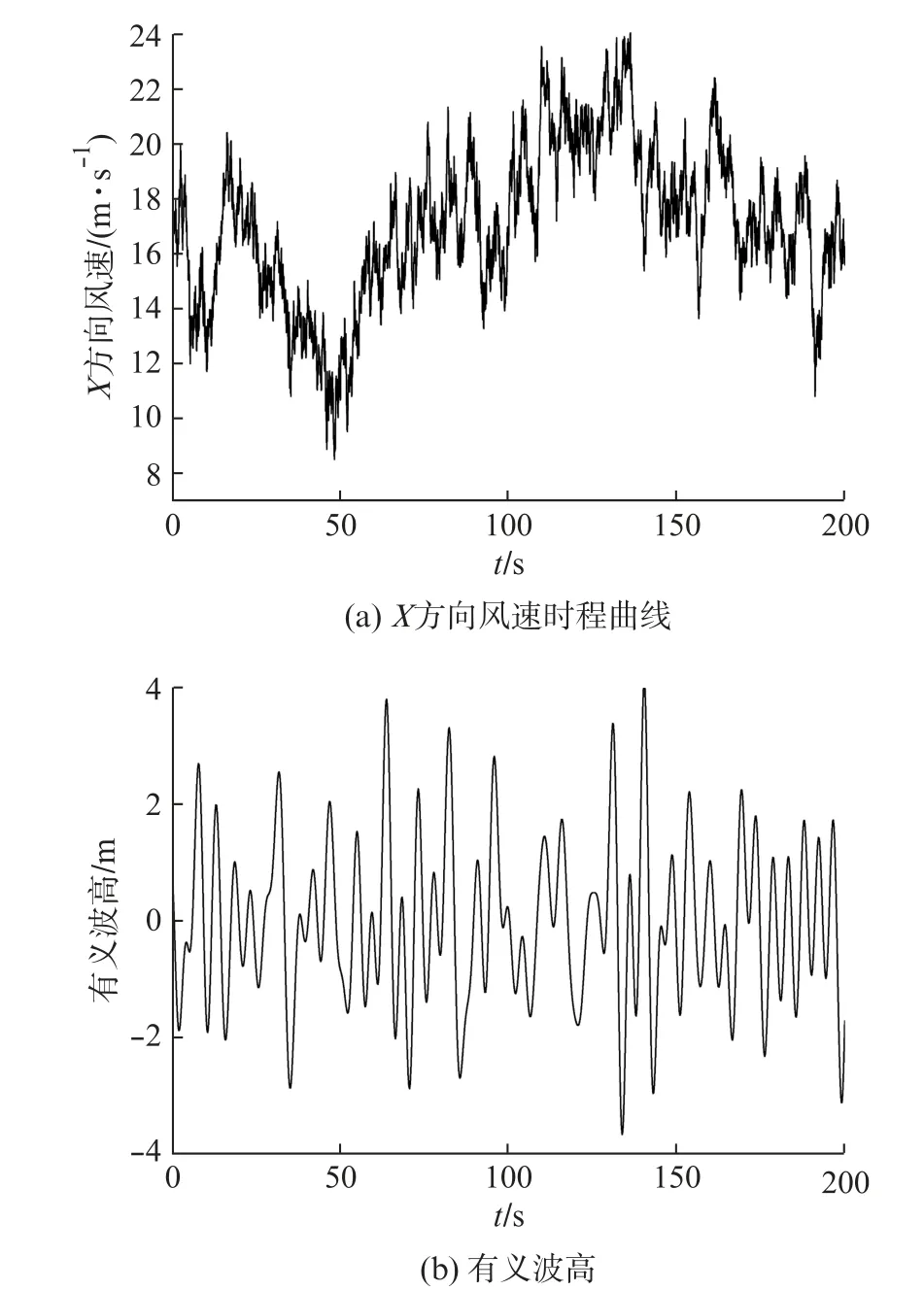
图3 风机运行工况
结合图4平台载荷分析对比和表3标准差分析可知,在湍流风、不规则波浪联合作用下,对比本文中的CPC和IPC A,IPC B下的平台垂荡运动的标准差分别下降了9.9%和10.6%,表明IPC B能缓解平台垂荡运动,使平台更稳定,在一定程度上降低了由平台运动引起的载荷。此外,叶片1叶尖位移的振幅在IPC B 下也更小,对比本文中的CPC和IPC A,IPC B下的叶片1叶尖位移的标准差分别下降了23.4%和3.09%,叶片1叶尖位移的振幅减小反映出在IPC B下叶片摆动范围减小,叶片摆动范围减小能缓解机组晃动,从而降低叶片载荷和机组受到的载荷。
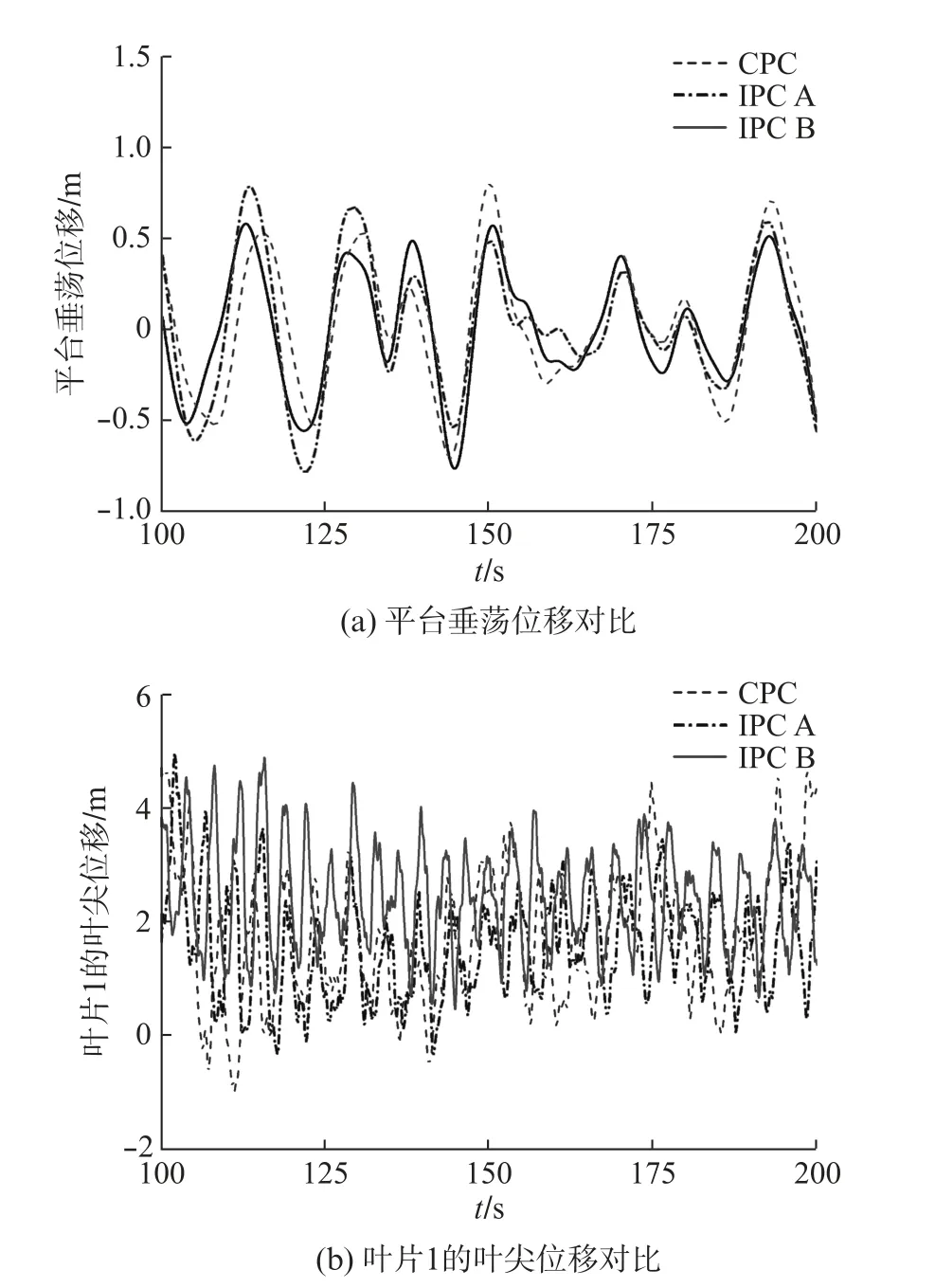
图4 平台载荷分析对比
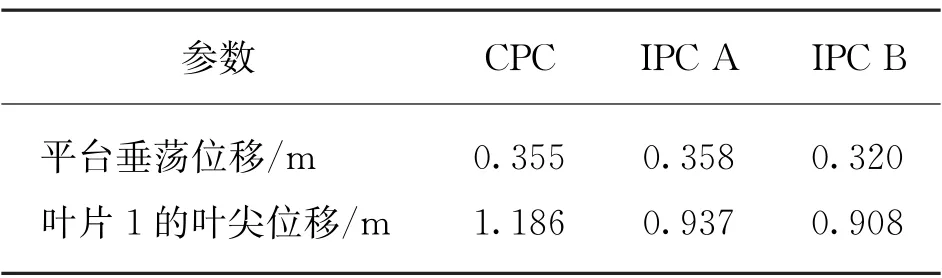
表3 3种变桨距控制技术标准差分析
4 结 论
对比3种不同变桨距控制技术,分析半潜式漂浮式海上风机受到载荷变化后得出以下结论:
(1) 在缓解漂浮式海上风机的平台垂荡运动和降低叶片1叶尖位移方面,IPC B优于CPC和IPC A。在IPC B下,平台垂荡位移减小,一定程度上缓解了浮式平台的晃动,降低了漂浮式海上风机由平台运动引起的载荷。
(2) 在IPC B 下,叶片1叶尖位移的振幅减小,在一定程度上能减小由叶片摆动引起的载荷,延长叶片的寿命。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
山东冶金(2022年2期)2022-08-08
通信电源技术(2020年17期)2020-12-28
哈尔滨轴承(2020年1期)2020-11-03
燃气涡轮试验与研究(2019年5期)2019-12-01
创新作文(小学版)(2019年21期)2019-01-11
风机技术(2018年1期)2018-03-21
通信电源技术(2016年1期)2016-04-16
工业设计(2016年11期)2016-04-16
电气传动自动化(2014年6期)2014-03-20
