
面向智慧渔船的多功能北斗示位标
2022-11-07 10:40张铮刘昭辉曹守启
全球定位系统 2022年4期
张铮,刘昭辉,曹守启
(1.上海海洋大学 工程学院,上海 201306;2.上海海洋可再生能源工程技术研究中心,上海 201306)
0 引言
我国是海洋渔业大国,海洋捕捞业、海洋养殖业发达,但也正面临着传统渔业向智慧渔业转型的巨大挑战[1].示位标是船运中广泛应用的应急无线电定位设备,在渔船发生故障时扮演重要角色.传统示位标定位精度差,功能单一,仅能在沉船事故时发送求救短报文信息.2020 年北斗三号卫星导航系统(BDS-3)全球组网完成之后,北斗卫星导航系统(BDS)可以为全球用户提供全天候、全天时、高精度的短报文通信、定位、导航和授时(PNT)服务[2].根据我国海洋渔业企业建设智慧渔业的需求,新型示位标在位置服务功能的基础上,还应具备船-岸的信息交互功能,提高渔船的信息化和智能化水平.
本文基于北斗定位和短报文通信技术,设计了一种新型多功能示位标.此示位标的工作模式有两种:一是正常模式,当渔船正常航行时,利用北斗短报文上传船位、航速、航向以及渔获物信息到岸上管理平台,提供渔业信息服务;二是遇险模式,渔船遇险下沉后,示位标通过静水压力释放器脱离船体上浮至水面,按照预设的周期向岸上管理平台发送报警信息.
1 示位标工作原理和硬件设计
1.1 工作原理和系统组成
示位标求救北斗短报文传输过程如图1 所示.正常模式下传输过程为:船载渔业信息通过船载无线局域网发送至示位标,示位标通过北斗模块将渔业短报文信息发送至北斗卫星,网关负责渔业数据信息的接收和转换,并与企业云平台对接,供用户访问和查看;遇险模式下传输过程为:示位标终端将求救短报文发送至卫星,卫星接收到短报文信息后,立即根据接收端的地址进行广播,应急搜救控制中心收到此信息后,将求救信息转发应急搜救中心由其确认并发送救援命令[3-4].
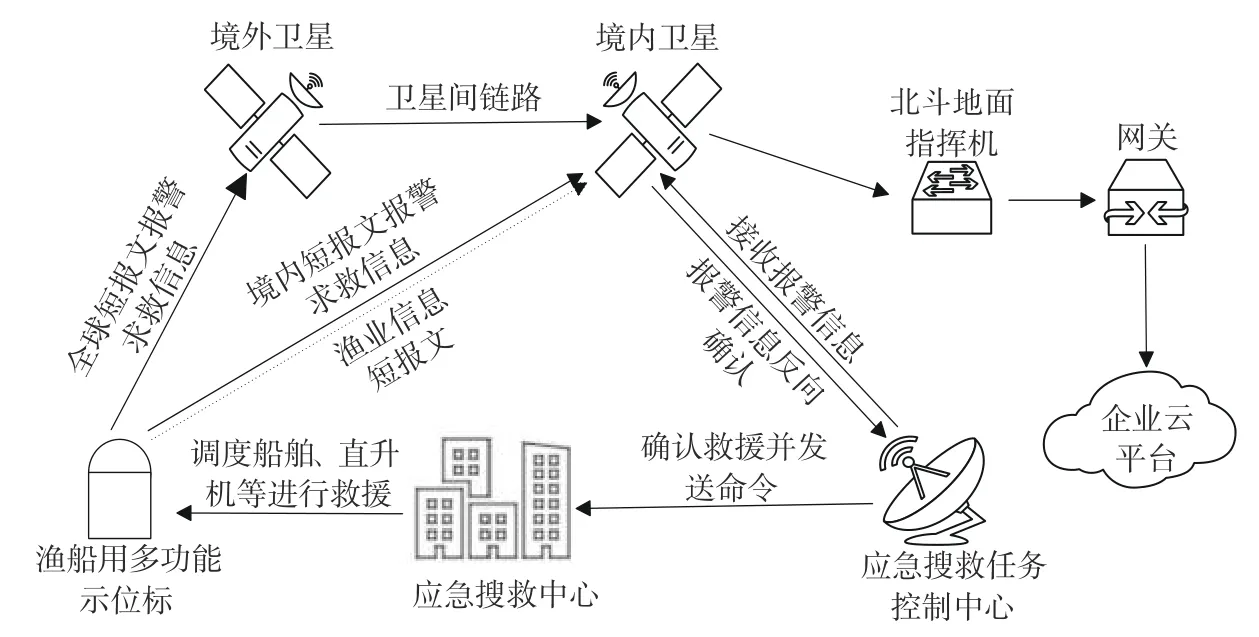
图1 短报文传输过程示意图
1.2 硬件设计
示位标硬件主要有控制单元、北斗模块、电源管理模块、Wi-Fi 模块等组成,其系统组成原理图如图2所示.
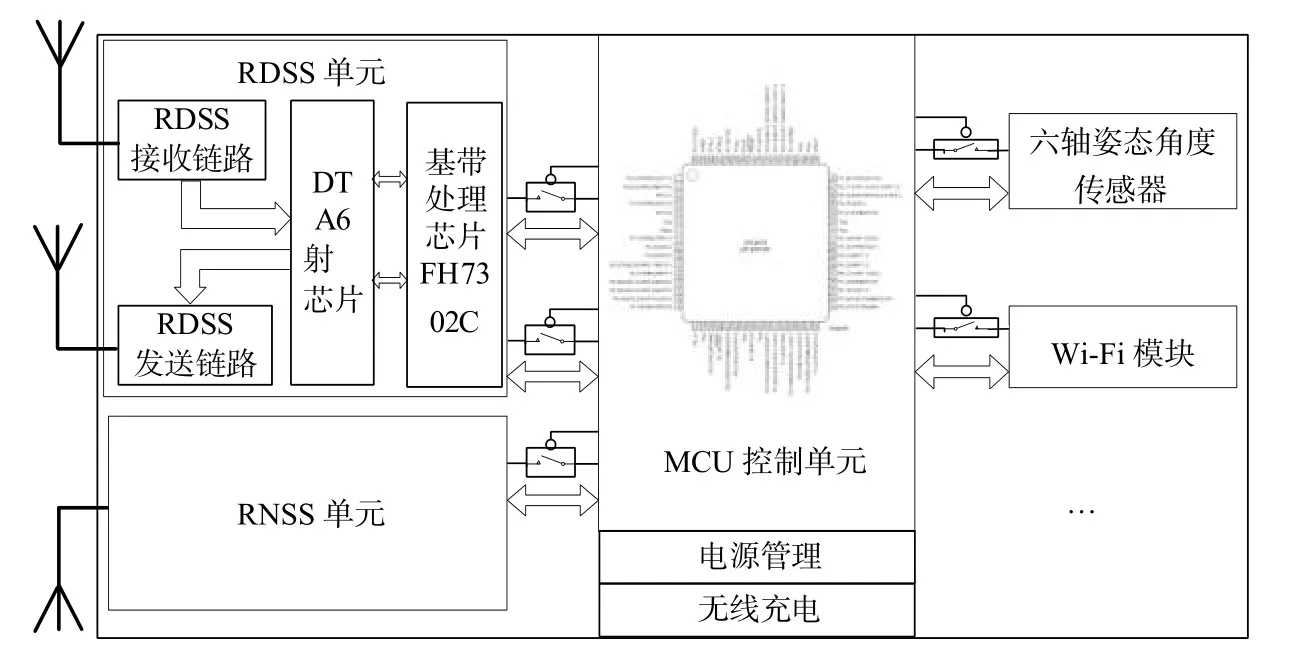
图2 示位标系统原理框图
控制芯片采用低功耗微控制器STM32L151[5],外设丰富,可满足低功耗设计需求.北斗模块FHM6868集成了卫星无线电导航系统(RNSS)的B1 和L1 频点、北斗卫星无线电定位系统(RDSS)收发射频芯片、基带芯片、PA、LNA 和天线,接口通信协议兼容北斗2.1 协议,发射功率为10 W,提高通信成功率.ESP8266 Wi-Fi 模块用于在正常工作模式下采集各种船载渔业信息,然后利用北斗短报文上传船位、航速、航向以及渔获物信息到云服务平台,以实现对渔船航行、渔业信息的远程监测和管理.六轴姿态角度传感器ICM42605,测量精度误差仅为0.1°,通过串口与MCU 连接.根据渔用多功能示位标连续工作5 a的企业需求,采用12 V 可充电锂电池实现对示位标的在正常工作模式下的供电,并通过无线充电的方式保证电池满电.电源管理芯片选用TPS51397,最大输出电流为10 A,关断电流小于1 µA,满足供电需求;各功能模块均通过电子开关控制开启和关闭,满足低功耗设计需要.系统硬件实物图如图3 所示.
图3 示位标硬件实物图
2 示位标在波浪下的稳定性仿真
示位标在波浪作用下会发生角度偏转甚至倾覆,这与海域环境、示位标质量和外形等属性有关.三维势流理论将流体假设为无黏、无旋和不可压缩的[6],适合示位标的频域仿真.三维势流理论指出,势流速度场是由速度势的梯度,流场的边界由物面边界、流体自由面、海底边界面和无穷远处柱面构成[7-9],满足的边界条件如下[10]:
1) 拉普拉斯方程

2) 海底边界条件

3) 自由表面条件

4) 浸没物体表面条件

5) 辐射条件
辐射波无穷远处的速度势趋近于0,即

在以上需满足的边界条件内,ϕ 为速度势函数,坐标轴分别设置为x、y、z,n为模型表面法向量,h代表水深,j取1~6 的数值分别代表了六个自由度的运动状态,六个自由度分别为横摇、纵摇、艏摇、横荡、纵荡、垂荡,vj为模型运动时的表面流速矢量,fj(x,y,z)为第j个运动状态时的模型表面的流线函数,R为流场与模型间的表面距离.
通过建立示位标仿真模型、选取合适的海域环境参数,基于三维势流理论进行仿真分析,以观察示位标在此环境下的角度偏转情况.
首先,用三维制图软件SolidWorks 设计示位标的壳体、内部结构及安装结构件,并进行装配,示位标的设计参数如表1 所示.利用AQWA 软件建立示位标简化模型,并进行水线切割和设置相关参数.
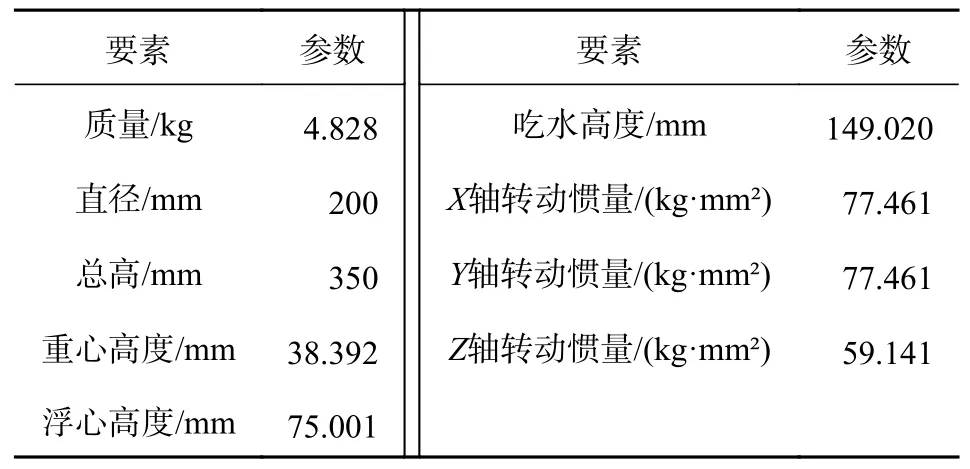
表1 示位标主要参数
其次,选取海域实验环境模拟参数.为了分析示位标在遇险模式下的运动特性,选取极端恶劣天气条件下的海况参数,所选取的海域实验环境模拟参数如表2 所示.
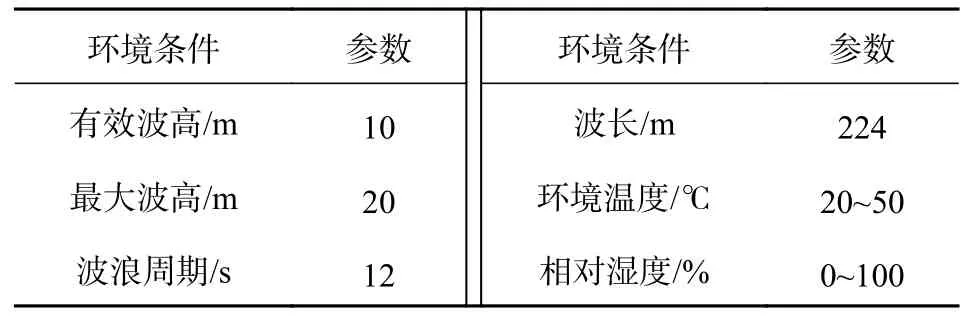
表2 示位标模拟海况数据实验参数
最后,设置仿真过程中所使用的波浪谱.波浪谱选取AQWA 内置的JONSWAP 谱,该波浪谱最能反应真实的海况条件.通过设置波浪频率的上下限、波浪方向及其入射方向间隔完成波浪谱的配置,X轴为波浪正方向.
运动幅值响应算子(RAO)是指模型对应自由度运动幅值与波幅的比,用以表示在波浪作用下的模型的运动响应.不同波浪入射方向的示位标RAO 如图4~5 所示.由图4 可知,在横摇方向,示位标RAO 随波浪频率的增大先增大后减逐渐趋缓,在波频较小时偏摆较为剧烈.由图5 可知,示位标在纵摇方向上有突变,可能会导致示位标翻转.
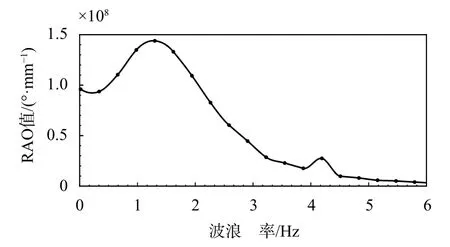
图4 示位标横摇方向RAO 值
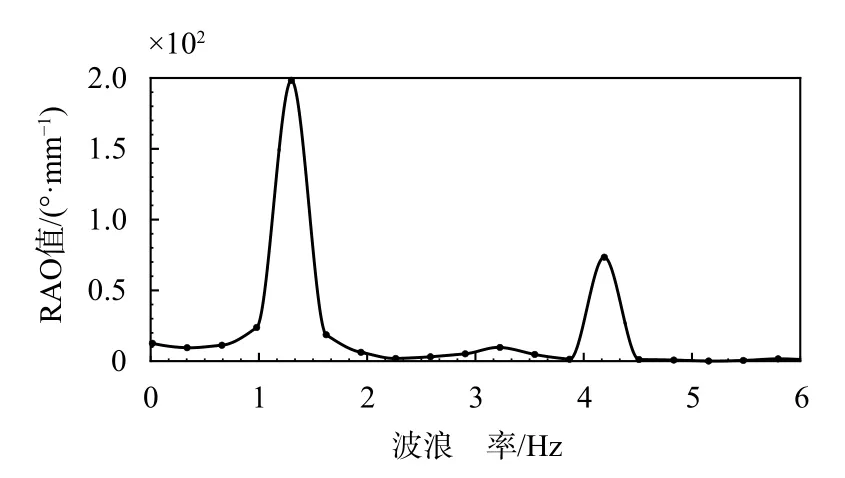
图5 示位标纵摇方向RAO 值
综上可知,在极端海况下,示位标随不规则波偏摆的角度变动幅度较大.由于北斗短报文实质为电磁波,而电磁波在水中会发生衰减[11-12],因此需考虑示位标随波浪的偏摆特性对短报文投递率的影响.
3 基于示位标姿态的短报文通信机制
3.1 基于示位标姿态的短报文通信机制原理
为了验证示位标姿态对短报文投递率的影响,分别在晴天无云和阴天两种天气状况下进行测试.以示位标中轴线为0°,水平放置,偏转角度分别为:25°、45°、75°、90°,在全天时间内进行短报文收发测试,统计不同偏转角度下的短报文投递率.测试结果如图6所示,在两种天气状况下,投递率随着偏转角度的减小而增大,在0°时达到最高,故在合适的示位标姿态下发送短报文是有助于提高投递率的.

图6 两种天气状况下的短报文投递率比较
利用示位标内置的六轴姿态角度传感器测量示位标偏转角,以保证在合适的示位标姿态下发送短报文.设置其在偏转角小于或等于10°时发送短报文.基于示位标姿态的短报文发送流程如图7 所示:当示位标入水上浮后,随波浪运动发生角度偏转,当检测到偏转角度小于或等于10°时,北斗模块即发送短报文;北斗模块在60 s 内仅可发送一次短报文,在发送后进入间隔等待.偏转角度大于10°时,北斗模块则等待发送时机.
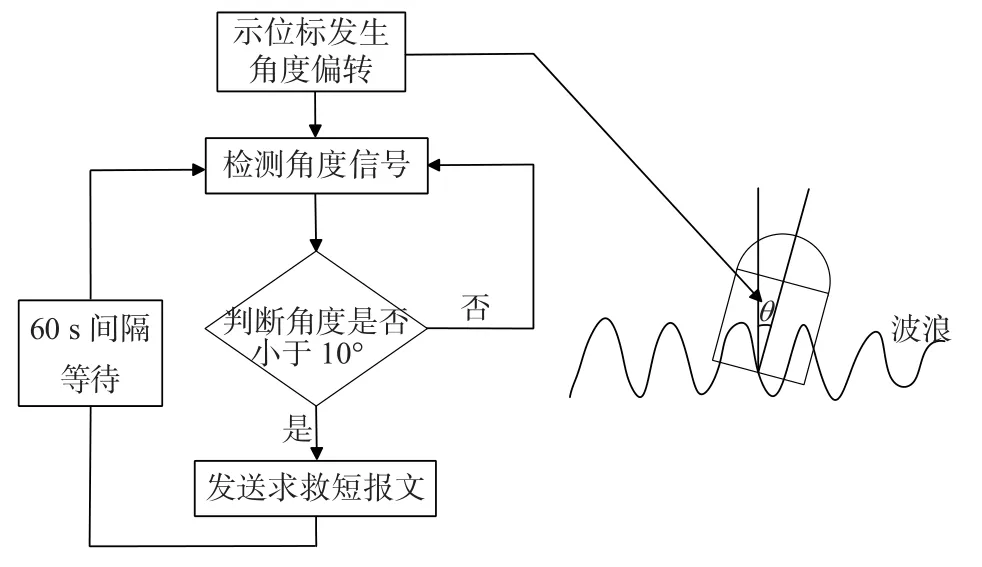
图7 短报文发送流程图
3.2 短报文收发实验测试
为保证示位标能够满足遇险模式下的续航需求,对其在该模式下的工作进行续航实验.示位标采用的12 V 锂电池总容量为6.4 A·h,RDSS 模块发射功耗为10 W,每间隔60 s 发送一次短报文,发送后即由电子开关关断各功能部件以节省电量,通过24 h的续航测试可估算出续航时间为12 天,满足示位标遇险模式下的连续工作需求.
通过短报文收发实验检验上述通信机制对短报文投递率的改进效果.如图8 所示,实验分别在晴天无云和阴天两种天气下进行,共分为两组,第一组将示位标安装至高处对空(模拟船体桅杆),上方无遮挡,进行正常模式下的工作;第二组将示位标放置在距造波机15 m 处的水池中,进行遇险模式下的工作测试.
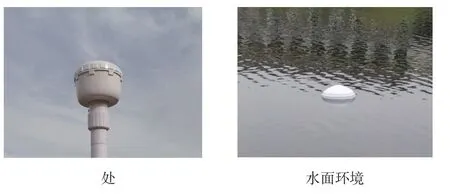
图8 现场实验图
两组实验结果如图9 所示,示位标在晴天无云条件下的短报文投递率较高,而在阴天条件下的投递率略有下降,这是由于阴天有较多乌云,信号接收不畅,对短报文投递率略有影响.与第一组实验相比,第二组实验中短报文投递率总体上略有下降,这是由于随波浪偏摆导致短报文信号受到干扰.在高处实验环境下晴天与阴天的短报文投递率差值与在水面环境下晴天与阴天的短报文投递率差值几乎相等,说明第二组实验中阴天较晴天短报文投递率的下降主要是由天气差异引起的,而在水面环境下示位标的较大偏摆对于短报文投递率的影响不大,故验证了基于示位标姿态的通信机制能够提高短报文的投递率.
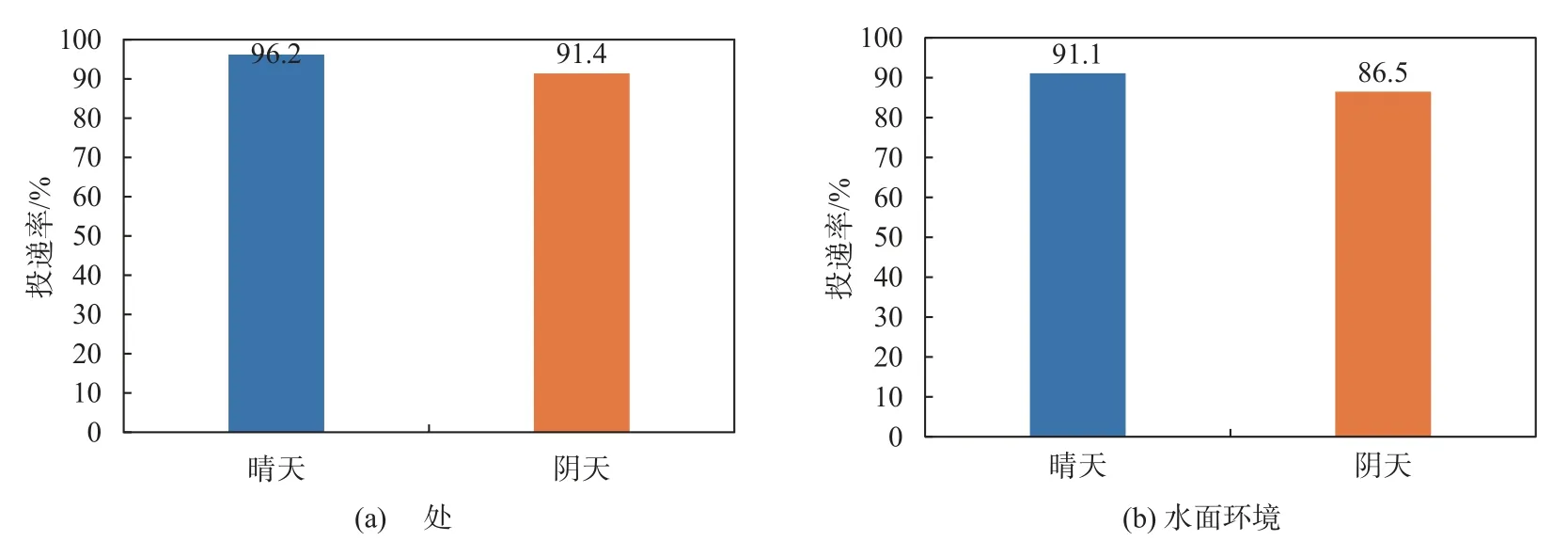
图9 两组实验短报文投递率比较
4 结束语
本文设计了一种基于北斗定位和短报文通信技术的新型多功能示位标,并进行了示位标在极端恶劣海况下的偏转角仿真实验和不同姿态下的短报文收发测试,在此基础上提出了基于示位标姿态的短报文发送机制,并进行实验验证.实验结果表明:在水面环境下,基于示位标姿态的短报文通信机制能够降低偏转对示位标的影响,有效提高短报文投递率,在智慧渔船应用中具有良好的推广前景.
猜你喜欢
汽车电器(2022年9期)2022-11-07
电子技术与软件工程(2022年11期)2022-09-09
中外文摘(2022年13期)2022-08-02
学苑创造·A版(2022年4期)2022-06-18
软件导刊(2022年3期)2022-03-25
科学家(2021年24期)2021-04-25
阅读与作文(小学高年级版)(2020年3期)2020-03-02
扬子江(2019年1期)2019-03-08
红领巾·萌芽(2015年5期)2015-06-16
现代营销·经营版(2008年10期)2008-05-14
