航天器着陆缓冲机构技术研究进展
2022-11-02 09:37陈金宝陈传志
南京航空航天大学学报 2022年5期
聂 宏,王 宸,陈金宝,陈传志
(1.南京航空航天大学机械结构力学及控制国家重点实验室,南京 210016;2.南京航空航天大学航天进入减速与着陆技术航天科技集团重点实验室,南京 210016)
深空探测技术是国家综合国力和科技水平的集中体现,也是各航天强国竞相角逐的航天技术新高地。在深空探测领域,地外天体软着陆探测已成为最重要的探测方式之一,着陆缓冲机构是实施软着陆探测的核心装置,其性能可靠性直接关系到整个探测任务的成败[1]。从1959 年至今,前苏联、美国、中国和欧盟等国家先后在地外天体实现了航天器着陆探测。从地外天体探测任务的统计来看,发射和着陆是所有深空探测器最容易发生故障的环节。在所有失败的探测任务中,着陆环节发生故障所引发的探测失败占探测任务总数的比例分别为金星探测6.25%、月球探测29.2%、火星探测36.8%[2]。而在各类星球探测任务的初始阶段,着陆环节故障而导致的探测任务失败所占比例更高。因此,航天器着陆缓冲机构技术是深空探测的关键和基础。
航天器着陆时需在恶劣且欠认知的星表崎岖地形条件下,瞬时吸收大冲量冲击,实现探测器平稳着陆;加之运载器的运载质量、空间限制与发射成本限制严苛,航天器着陆缓冲机构的设计必须实现高吸能质量比的缓冲器和强地形适应能力的机构构型的高效适配。其次,航天器着陆缓冲机构的运动副多样、自由度多、缓冲材料非线性和足垫/月壤接触非线性强,导致其着陆动力学模型复杂、多种工况模拟分析难及计算效率低。再次,地外天体真空、高低温、低重力等巨大天地差异环境大大增加了航天器着陆缓冲机构的地面等效试验验证难度[3]。本文结合航天器着陆缓冲机构设计所需考虑的技术难点与关键科学问题,从航天器着陆缓冲机构设计技术、动力学分析技术和地面等效试验技术3 方面对航天器着陆技术进行了综述。
1 航天器着陆缓冲机构设计技术
1.1 航天器着陆缓冲机构主要功能
航天器着陆缓冲机构类似于现代飞机起落架系统,主要用于缓冲航天器着陆时的冲击,防止着陆过程中由于冲击过大而导致仪器设备损坏或人员伤害[4]。除此之外,它一般还应具有压紧收拢、展开锁定、长期支撑、着陆指示等多种功能,是一种典型的复杂多功能航天器机构;其研究一般涉及构型综合、运动学、动力学、材料学、摩擦学、土壤力学、传感器与测量等多个学科,属于典型的综合性交叉学科领域,具有较大的理论与技术难度;其主要组成结构与功能如表1 所示。
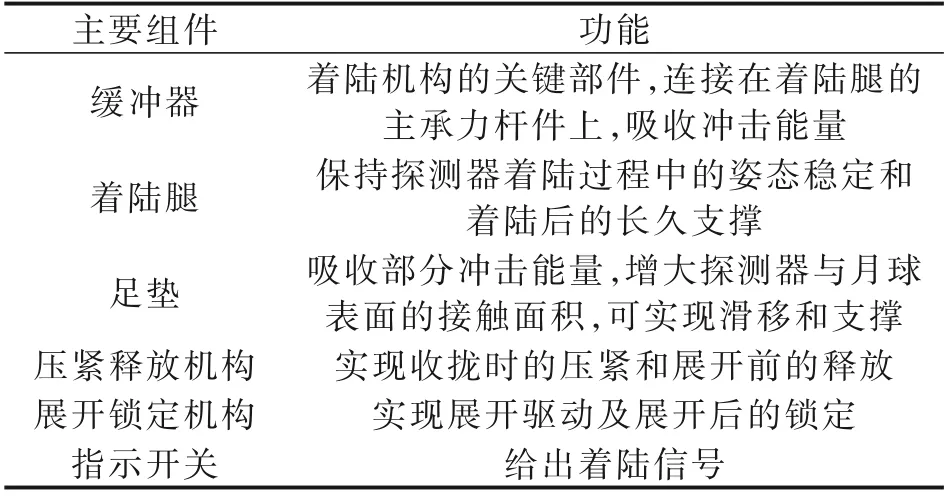
表1 航天器着陆缓冲机构主要组件与功能Table 1 Main components and functions of spacecraft landing buffer mechanism
为实现航天器着陆缓冲机构的上述功能,在适配缓冲器高效缓冲吸能的着陆缓冲机构设计与研制过程中,需结合机械运动学、动力学与材料学等学科确定航天器的着陆缓冲方法、缓冲器设计方案,融合构型综合、机械运动学、摩擦学、传感器与测量等学科,最终确保航天器的平稳着陆,从而支撑地外天体着陆探测任务。
1.2 航天器着陆缓冲方法
在地外天体进行着陆时需要面临高低温、真空和崎岖着陆环境等恶劣条件,并需要满足高吸能质量比、高可靠性及易检验性的要求。因此,采用何种缓冲方法与缓冲器进行着陆缓冲是航天器着陆缓冲机构设计与研制过程中所面临的首个技术难题。缓冲器是月球着陆器进行缓冲着陆的主要吸能结构,是整个装置最关键部分。传统的月球软着陆缓冲机构所用缓冲器,根据其缓冲吸能方法主要可分为:塑性形变缓冲法、气液缓冲法、电磁缓冲法和磁流变液缓冲法。
1.2.1 塑性形变缓冲法
由于蜂窝材料、薄壁管材料和泡沫材料等吸能材料具有吸能比高、质量轻等优点,被广泛地应用在着陆缓冲机构的缓冲吸能装置上。其中,铝蜂窝材料是一种含有众多空穴和胞结构的二维多胞材料,拥有刚度小、相对密度小、压缩变形能力大等众多优点。作为一种理想的缓冲吸能材料,铝蜂窝被广泛地使用在各类缓冲防撞结构中。在着陆缓冲机构中,铝蜂窝材料在冲击载荷的作用下发生压溃变形,将着陆过程中的冲击能量转化为材料的压溃变形能,从而帮助着陆器实现减速着陆,典型的铝蜂窝缓冲器如图1 所示。目前,铝蜂窝缓冲器是月球着陆器的主要方式,例如美国的“阿波罗”系列着陆器[5]、欧洲的“欧洲月球”着陆器[6],日本的“月亮女神B”着陆器[7]及中国的“嫦娥”[8]系列着陆器均采用此种方式,如图2 所示。
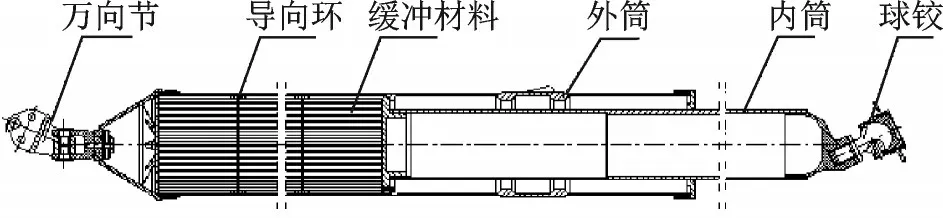
图1 典型的铝蜂窝缓冲器Fig.1 Typical aluminum honeycomb buffer
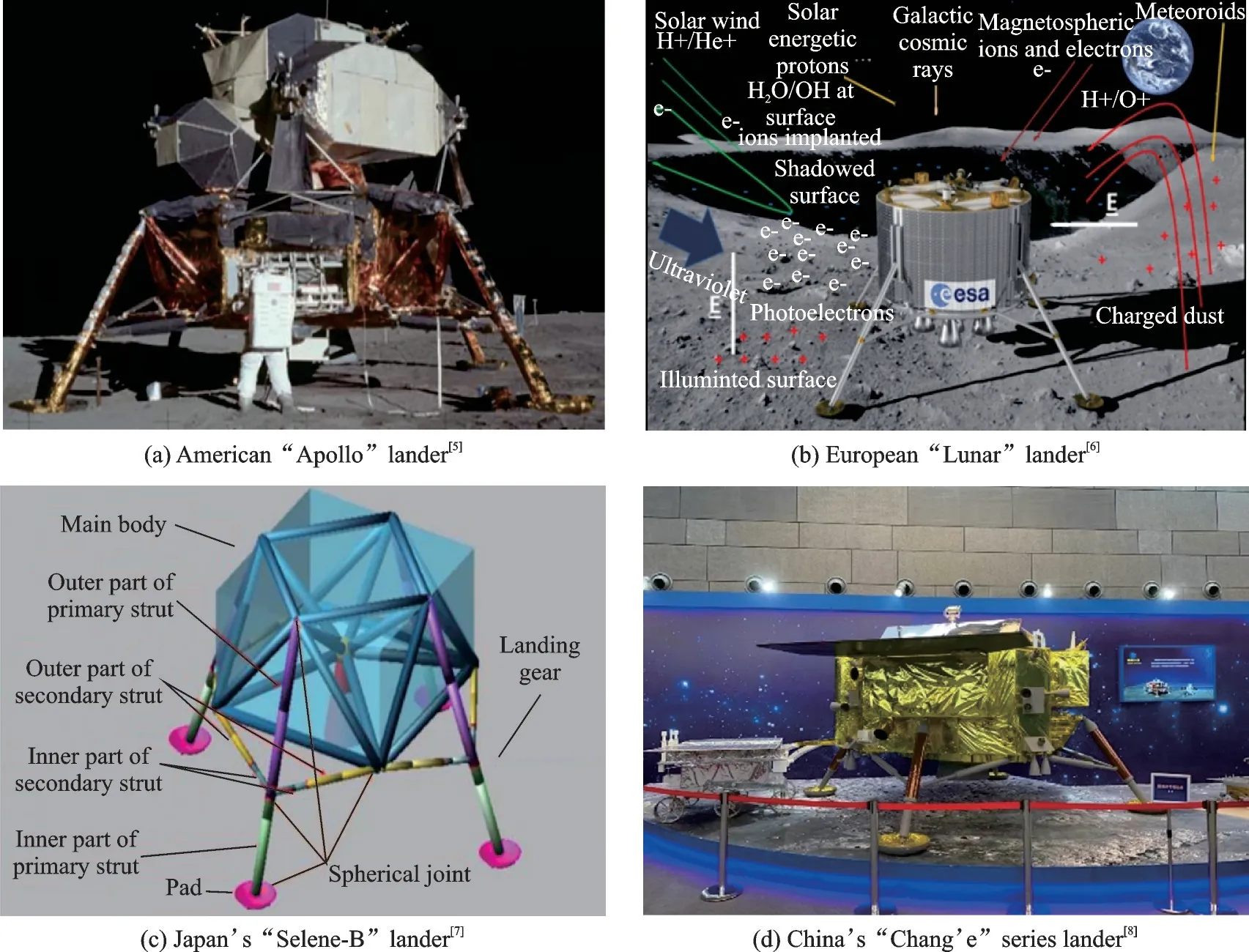
图2 各国月球着陆器[5-8]Fig.2 Lunar landers of different countries[5-8]
到20 世纪80 年代,出于对月球资源开发的目的,各国开始了第二轮探月活动,研究人员开始进行新型缓冲方式与设计方法的相关研究。
针对美国的重返月球计划,美国航空航天局NASA 提出了全新的“牵牛星”月球着陆器,该着陆器采用全新的复合材料和设计方法,相比传统材料,采用铝锂材料制造的着陆器支柱结构质量更轻、缓冲效率更高[9-10]。但该方案无法解决铝蜂窝缓冲器无法重复使用、阻尼力不可控的根本缺陷问题。此外,NASA 为实现2024 年载人登月与2028年长期驻留月球,提出“Artemis”计划,选择了SpaceX、Dynetics 和Blue Origin 三家公司为其研制新型月球着陆器,但其着陆缓冲机构的具体技术方案仍未透露[11-12]。
中国亦有众多学者对于航天器着陆缓冲方法开展了研究。哈尔滨工业大学的邓宗全团队较早对着陆器所用的不同规格铝蜂窝和泡沫铝的缓冲性能[13]、金属橡胶的缓冲性能[14]、新型涡流磁阻尼缓冲器的缓冲性能进行了研究[15],并研制了倒三角式和悬臂梁式两种着陆器样机,对样机进行了着陆性能和着陆稳定性研究[16-17]。南京航空航天大学的聂宏团队针对月球着陆器着陆性能[4,18-19]、铝蜂窝材料缓冲性能的影响因素[20-21]进行了相关研究,并研制了缩比样机[22]。此外,该团队针对航天器着陆缓冲吸能材料所需的轻质量、小体积及高吸能要求,开展了纳米吸能材料的研究;探索性地将巴基纸材料应用于载人月球着陆器着陆缓冲机构之中,并将其与传统铝蜂窝材料的缓冲性能进行了对比,验证了巴基纸材料的优异缓冲吸能特性[23-24]。中国空间技术研究院总体部杨建中、朱汪等对月球着陆器进行了系统化的工程研究,提出了多种缓冲方法、机构设计方法、试验方法及可靠性研究[1,8,25-26];研制了中国“嫦娥”系列着陆器[27],成功实现了中国首次月面软着陆与人类历史首次月背软着陆。
铝蜂窝缓冲器具有吸能质量比高、环境适应性强等优势,美国、前苏联(俄罗斯)、中国等国家均采用该方式进行月球探测的着陆缓冲。然而,铝蜂窝缓冲器也存在若干缺陷,例如缓冲力曲线不平滑、铝蜂窝变形后不可恢复等局限性。因此,国内外众多研究机构和学者致力于各类新型塑性形变缓冲方法的研究。
2021 年5 月15 日,中 国 的“天 问 一 号”探 测 器成功着陆火星表面,中国成为继美国后第二个成功着陆火星的国家[28]。“天问一号”火星着陆器全部采用高锰奥氏体孪生诱发塑性钢(Twin induced plasticity steel,TWIP)拉杆作为缓冲吸能元件,在主支柱缓冲器内各布置了两根拉杆。着陆时,利用主缓冲器向外滑移的相对运动,拉伸拉杆吸收纵向和水平方向的冲击载荷,使拉杆发生拉伸变形,从而将冲击动能转化为拉杆塑性变形能。TWIP 能够提供很高的缓冲塑性变形行程,在变形过程中吸收大量的冲击能量[29]。相比于铝蜂窝缓冲方法,在合理设计方法和工艺保证下,TWIP 可实现多次塑性变形进行缓冲吸能,有望在未来月球与火星探测任务中支撑探测器实现多次着陆探测。
1.2.2 气液缓冲法
气液缓冲法,是在着陆过程中利用缓冲机构内部液体流经阻尼孔,在两端产生压力降的原理,产生阻尼力。气液缓冲法的缓冲过程平稳、在缓冲过程中不会出现反弹现象,并具有吸能后可恢复的特点,这使得液压缓冲器在早期的月球着陆缓冲机构中被广泛使用,例如美国“勘察者”系列月球着陆器和前苏联的“月球”16、17、20、24 号月球着陆器。
由于月表环境的特殊性,月球着陆缓冲机构所使用的液压缓冲器和普通工业级的液压缓冲器有着很大的差异。普通工业级的缓冲器所采用的缓冲油液是不可压缩的,但是月球着陆器中所使用的油液则是可压缩的,例如美国“勘察者”系列月球着陆器通过向油液中添加硅树脂实现了缓冲油液的可压缩性。如图3 所示,着陆缓冲机构的油液被密封在缓冲器的缸体内部,无法流出;在着陆过程中,油液能够在两侧的腔体内流动;在足垫触地后,足垫推动液压式缓冲器内的活塞杆,活塞迫使油液穿过阻尼孔产生阻尼力,进行缓冲减速;完成着陆后,缓冲器内被压缩的油液推动活塞杆向外伸出,使着陆腿逐渐回复到初始状态,实现对着陆器姿态的调整[30]。

图3 美国“勘测者1 号”月球探测器及其缓冲器结构图[30]Fig.3 The US lunar probe“Surveyor 1”and its buffer structure diagram[30]
因为月球环境具有真空、高低温、昼夜温差大等特点,而液体的密度和黏度等受温度影响较大,且需要考虑液体密封问题,因此该方式在设计和使用时具有较大的难度和较高的风险。其中美国“探测者1 号”在后期月面探测中就出现了液体泄漏的现象,随着着陆器设计技术的发展,后期各国进行的深空探测活动中均不再采用此种方式[30]。
1.2.3 电磁缓冲法
随着地外天体探测范围的扩大与着陆任务要求的提高,越来越多的研究者开展了可重复使用、可控着陆缓冲机构的相关研究。欧洲航空航天局ESA 在其探索火卫一的“Phootprint”任务中提出了一种新型可控着陆器。该着陆器利用电磁执行器作为着陆腿主支柱,其结构如图4 所示[31]。目前该方案仍处于研制阶段,且电磁缓冲器所能承载的着陆器质量与着陆速度十分有限,其所面临的最大冲击速度仅为1.5 m/s,缓冲力性能与地形适应能力较差[31],难以适用于月球、火星等引力较大的地外天体着陆探测任务。
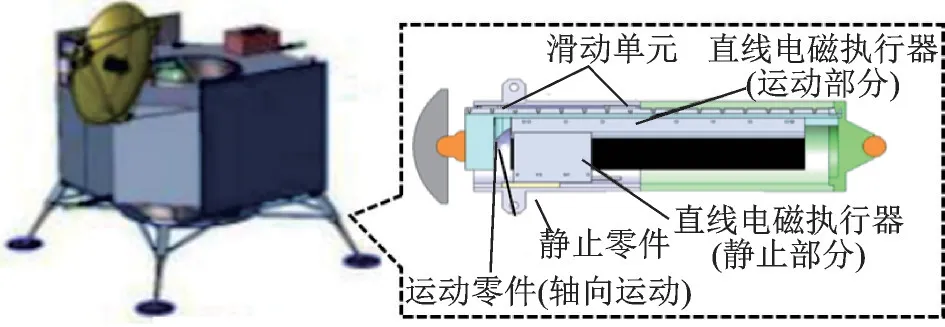
图4 “Phootprint”着陆器构型及其电磁执行器主支柱[31]Fig.4 Configuration of lander“Photoprint”and main strut of its magnetic actuator[31]
1.2.4 磁流变液缓冲法
磁流变缓冲器具有响应速度极快(可在十几毫秒内实现屈服应力的控制调节)、缓冲力大、缓冲后可快速恢复等优点。而且还具有适应高低温环境、能耗低的优势。因此,国内外许多专家和学者设想将磁流变缓冲器应用于航天器着陆缓冲机构之中[32]。日本宇航研究所JAXA 的Maeda 等[33-34]提出了一种基于半主动控制的磁流变月球着陆器,可独立地调节每条着陆器的阻尼系数,实现稳定着陆;并对其着陆腿数目、允许的着陆初始运动状态、着陆稳定性等问题进行了研究。北京航空航天大学的王春洁团队[35]利用MSC.Adams 动力学软件建立了一种变阻尼缓冲器模型,并利用多种算法对其进行了优化,分析了采用变阻尼缓冲器的可行性。南京航空航天大学的聂宏团队[36-40]提出了一种采用磁流变液阻尼器的月球着陆缓冲机构,进行了多种半主动控制方式的着陆仿真分析,并开展了原理样机着陆试验。相比于现有铝蜂窝着陆器,所提出的基于磁流变液缓冲器的半主动控制着陆缓冲机构具有更出色的着陆性能和着陆环境适应能力。
对比现有4 种航天器着陆缓冲方法可以看出,塑性变形缓冲法广泛适用于月球、火星等各类地外天体的着陆探测,并已经过多种航天型号的工程检验,相关技术成熟可靠。但目前仅能实现单次、单点着陆缓冲,致使探测器探测范围与探测任务内容受限。气液缓冲法虽然具有可多次缓冲、着陆后姿态可恢复等优点,但受限于地外天体的高低温和真空等极端环境,仅在早期月球探测中使用,随着航天器缓冲技术的发展,已被逐渐淘汰。此外,伴随地外天体探测需求的拓展,电磁缓冲法与磁流变液缓冲法等缓冲力可控的缓冲器应运而生,这两种缓冲方法均具有阻尼力可控、可重复使用与地外天体环境适应性较强等优点,但目前均仍处于预研阶段,仍未实现地外天体的实际工程应用,众多国内外研究机构和学者致力这两种缓冲方法型号工程化的研究之中。塑性形变缓冲法、气液缓冲法、电磁缓冲法和磁流变液缓冲法的综合性能比较如表2 所示。
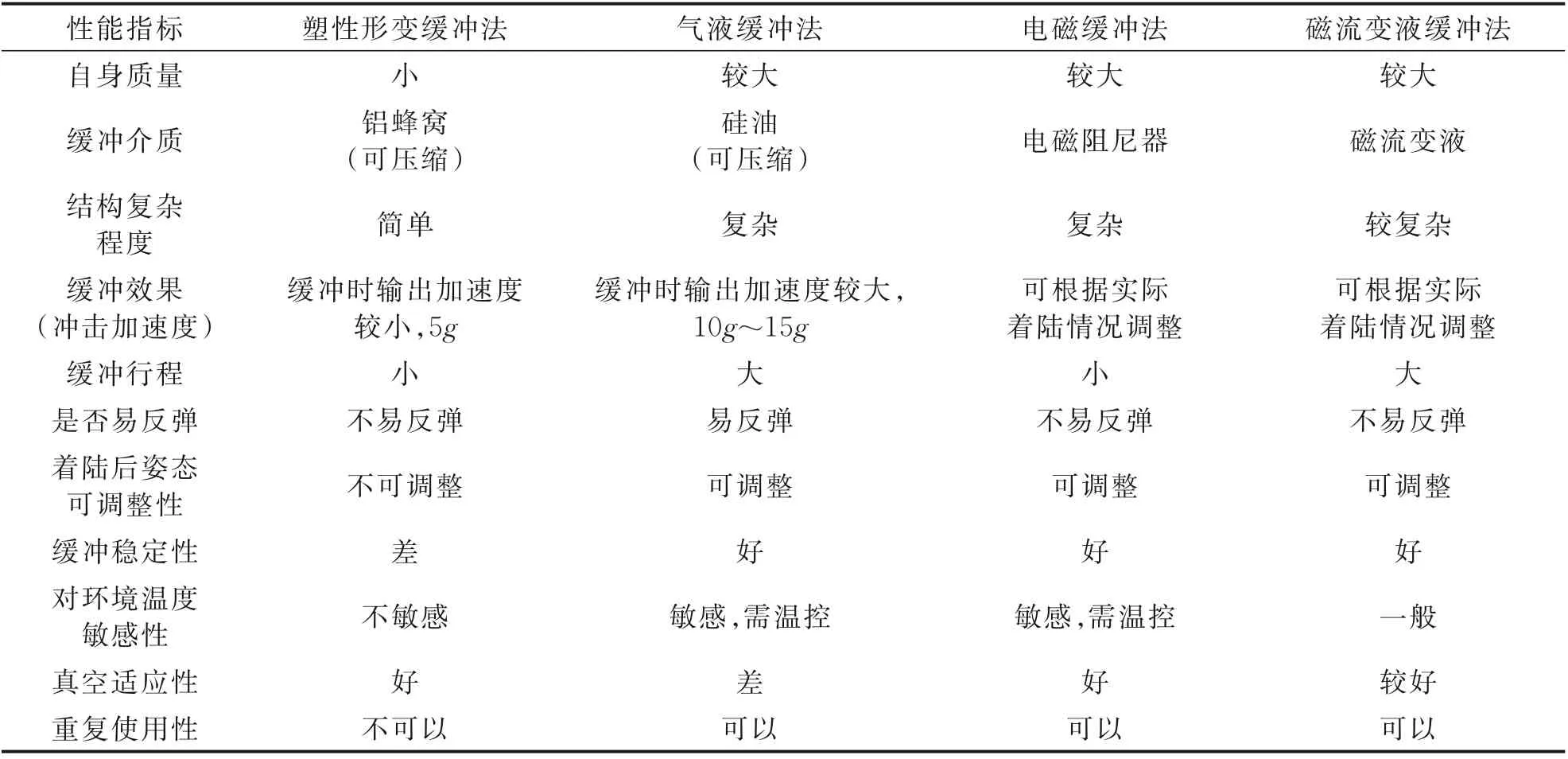
表2 各类缓冲器综合性能比较Table 2 Comprehensive performance comparison of different buffers
1.3 航天器着陆缓冲机构构型
为最大化实现缓冲器的缓冲吸能效益,避免探测器在着陆缓冲过程中发生倾倒等问题,需要结合缓冲器的动、静力学特性,开展缓冲机构设计。缓冲机构的布局与构型能极大地影响缓冲器的性能功效,决定了缓冲机构的基本性能,是研究着陆缓冲机构的核心内容,目前航天器着陆缓冲机构主要有已实现地外天体着陆型号验证的传统构型和处于预研阶段的各类新型构型。
1.3.1 传统构型设计
传统构型的航天器着陆缓冲机构均采用塑性形变缓冲法、气液缓冲法等被动式缓冲器,其形式相对单一,其构型主要为倒三角式和悬臂梁式两类,如图5 所示。如图5(a)所示,倒三角式着陆腿的主支柱和辅助支柱在靠近足垫的位置相连,主、辅支柱均为主要的缓冲支柱,均承受轴向力和弯矩的作用。由于其3 个支柱均为主要的缓冲支柱,则3 个支柱均小而轻。但该组合方式存在容易发生构件干涉、展开半径较小的缺点。如图5(b)所示,悬臂梁式的主支柱为主要缓冲支柱,其结构较为粗大,可承受轴向力和弯矩,用于缓冲垂向冲击能量。辅助支柱在主支柱中部的外筒下端与主支柱用万向节连接,结构较小,仅承受轴向力,主要用于缓冲水平冲击能量。悬臂梁式着陆腿相比于倒三角着陆腿具有重量轻、不易干涉、着陆稳定性好、收放行程大、展开锁定简单、月面地形适应能力强等优点[41],甚至当在足垫落入凹坑中时,仍然具有一定的缓冲作用。综合来看,悬臂梁式构型相比于倒三角式构型具有更多的优势。
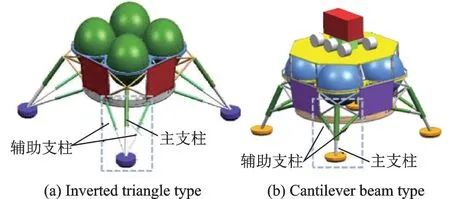
图5 传统着陆腿构型Fig.5 Traditional landing leg configuration
中国国内外航天器着陆缓冲机构的预先研究和实际应用中,倒三角式和悬臂梁式均有使用,例如美国的“勘测者1 号”月球着陆器(已成功实现月球着陆)、中国的“天问一号”火星着陆器(已成功实现火星着陆)、欧洲的“EuroMoon 2000”月球着陆器(仍未发射)等采用倒三角式构型。然而,更多的研究机构与学者采用悬臂梁式构型,如美国的“阿波罗”系列着陆器(已成功实现月球着陆)、中国的“嫦娥”系列月球着陆器(已成功实现月球着陆)、欧洲的“欧洲月球”着陆器(仍未发射)、日本的“月亮女神”月球着陆器(仍未发射)等。
1.3.2 新型构型设计
随着深空探测任务的发展,针对各类半主动、主动式缓冲器的相关研究逐渐增多,而倒三角式和悬臂梁式等传统构型的着陆缓冲机构,其缓冲力与探测器整体动力学映射关系复杂、难于开展着陆缓冲控制,已经难以满足未来深空探测所需高性能、可控着陆器的设计需求,越来越多的学者开始将仿生学原理和腿式机器人设计方法用于航天器着陆缓冲机构的设计之中[42]。
针对现有着陆缓冲机构的局限性与未来深空探测需求,众多学者开展了仿生腿式机构设计与控制的相关研究。神经生物学研究表明,腿式动物可通过控制神经系统与肌肉骨骼结构(即肌肉和身体)之间的相互作用来调节腿部刚度[34],进而适应复杂地表环境,实现各类自适应运动[44]。猫科动物在自然界经过数千万年的进化,其身体构造具备良好的奔跑和跳跃能力,是研究腿式动物肢体与本体关系的绝佳模型[45]。
苏黎世联邦理工大学的Rudin 等[46]提出了一种面向67P 彗星低重力着陆任务的小型四腿仿猫机器人,如图6 所示,采用强化学习方法进行控制,并对其进行了地面二维微重力着陆试验。该四足机器人通过四肢控制解决了探测器的飞行阶段、平稳着陆阶段和起飞上升阶段的姿态控制问题,与传统的动量轮调姿方式相比,可显著降低探测器质量与机构复杂性,实现探测器低重力下的可重复、可控着陆。
南京航空航天大学的聂宏团队[47]分析了家猫的形态尺寸比例和质量分布规律,通过对猫跳落过程中的姿态和地面对足部的反作用力进行分析,以关节制动器为缓冲吸能原件,设计了一种仿猫着陆缓冲机构,该着陆缓冲机构具有良好的缓冲性能。哈尔滨工业大学的凡友华团队[48]通过将仿生机器人的技术成果应用到着陆器的腿式机构设计中,结合蝗虫腿部的结构特点,设计了一种新型的缓冲着陆机构,与传统的着陆机构相比,仿蝗虫腿着陆缓冲机构在最大过载加速度控制方面具有更为出色的性能。此外,该团队通过模仿猫科动物的腿部骨骼与肌肉结构提出了一种基于气动肌肉的仿生缓冲机构模型,所提出的仿生着陆缓冲机构在能量转化率方面要优于传统着陆器[49]。上海交通大学的高峰团队[50]提出了仿生四腿/六腿式探月机器人,如图7 所示,设计了一种新型高功率密度力控驱动单元,采用主被动复合缓冲设计思路和控制方法,实现了机器人的稳定着陆。实验室条件下,可实现180 kg 负载(系统总质量200 kg)、2.1 m/s 下落速度的主动控制着陆。
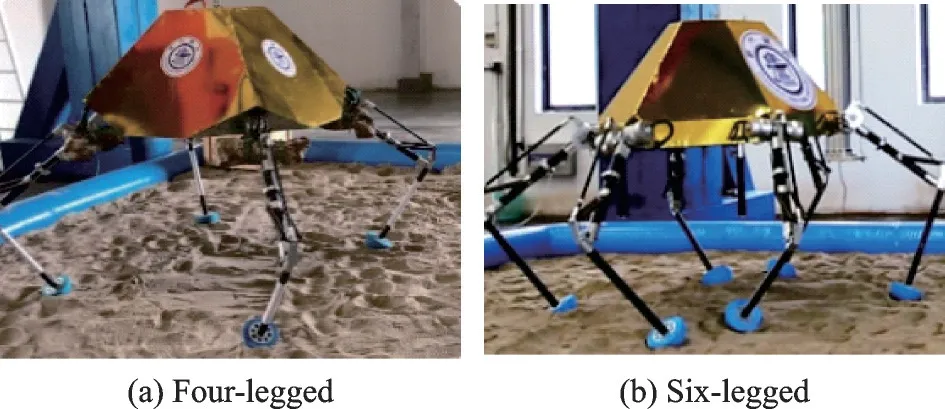
图7 高峰团队提出的仿生四腿/六腿式探月机器人[50]Fig.7 Bionic four-/six- legged lunar exploration robots proposed by Gao Feng et al.[50]
各类新构型着陆缓冲机构是未来航天器着陆缓冲机构构型研究的重要发展方向,通过引入仿生学、控制科学等学科的研究方法,面向共性导向的技术内涵,实现了多学科交叉融合。但其目前仍处于预先研究状态,仅进行了试验室理想条件下的落震试验,其机构缓冲吸能能力较弱、地外天体极端环境适应能力欠佳等技术瓶颈限制了其型号工程转化,还需要国内外研究机构与学者进行更为深入的研究。
1.4 地外小天体着陆与锚定机构
随着航天技术的进一步发展,各航天大国逐渐将深空探测范围由近地卫星和类地行星扩展到小行星、彗星和流星等近地小天体。由于小天体表面的微重力环境使得着陆器在接触小天体表面的瞬间容易反弹、飘走,因此地外小天体着陆缓冲机构作为月球/火星着陆缓冲机构技术延展的同时,也存在着较大差异,小行星探测的主要特点如图8 所示[51]。在着陆器和小天体表面接触时,着陆器需要通过锚固装置与小天体表面建立稳定连接,从而避免着陆器在进行采样、原地勘测等任务时由于反作用力而弹起。
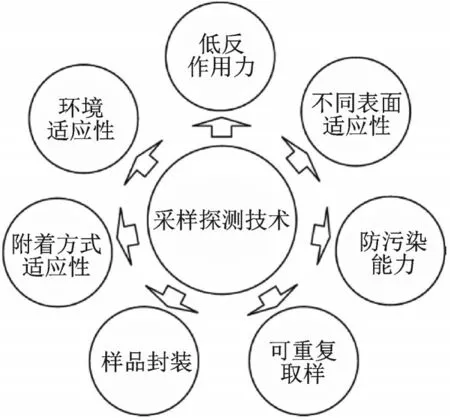
图8 采样探测技术特点[51]Fig.8 Features of sampling detection technology[51]
截至目前,全球共发射了22 次小天体探测器,这些探测器以不同形式对小天体进行了科学探测,其探测方式统计如图9 所示。其中,飞越探测任务有7 次,环绕探测任务有5 次,着陆探测任务有5次,采样返回任务有4 次,撞击任务有1 次。纵观世界各国的小行星探测任务,仅有5 次实现了小天体表面的成功着陆,分别为美国的“近地小行星交会”(Near earth asteroid rendezvous,NEAR)任务和“欧西里斯”任务、日本“隼鸟”系列任务和欧洲空间局“Rosetta”任务[52]。
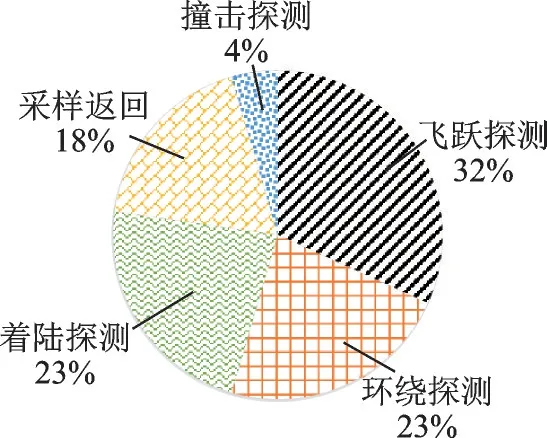
图9 小行星探测方式占比Fig.9 Proportion of asteroid detection methods
美国“欧西里斯-雷克斯”和日本“隼鸟”系列小行星着陆器均采用“接触-分离”的附着方式,在小行星表面短暂附着并采集样品,然后上升离开[53-54],该方式简单、可靠,但单次任务所能探测的信息较为受限。NEAR 探测器是NASA 研制的首个小行星探测器,该探测器采用开环减速制动控制策略,在下降过程中通过4 次制动来降低探测器的着陆速度,最终以1.5 m/s 的速度成功降落在爱神星的表面[55]。2014 年,欧洲宇航局发射的“菲莱”彗星着陆器成功在67P 彗星着陆,成为有史以来第一个在彗星表面着陆并开展科学考察的着陆器,如图10 所示[56]。“菲莱”采用“冰螺钉”与“鱼叉式”组合的锚固方案,当“菲莱”与彗星表面接触时,将“冰螺钉”推入彗星表面,完成初始锚固。随后,火工发射装置将鱼叉高速发射叉入彗星表面,使着陆器固定在彗星表面[56]。
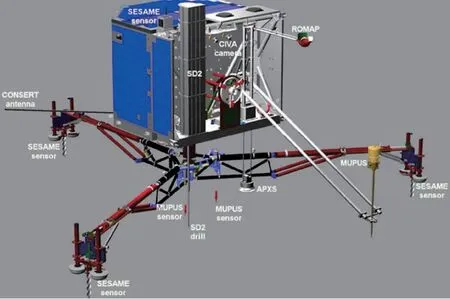
图10 欧洲宇航局发射的“菲莱”彗星着陆器[56]Fig.10 Comet lander“Philae”launched by ESA[56]
中国国内许多学者也开展了对地外小天体探测器着陆/锚定机构的相关研究。哈尔滨工业大学的林晓辉团队提出了一种小行星跳跃着陆器,并对其进行了着陆与跳跃动力学建模分析,探究了小行星自旋速度、重力加速度、表壤摩擦系数对探测器着陆性能的影响[57]。
哈尔滨工业大学的刘宏团队[58-60]研制了三腿、可折叠式小行星附着机构,采用半主动控制方式进行着陆,避免了着陆器缓冲过程中的反弹与倾覆。其同时提出了一种采用“线绳-锚体”的锚定方案,可实现着陆器和小行星之间的稳定机械连接,其着陆/锚定机构如图11 所示[58-60]。南京航空航天大学的聂宏团队[61]提出了一种可重复缓冲吸能的小行星着陆器,并对其进行了收展与着陆缓冲仿真分析。仿真结果证明,小行星着陆器整机方案着陆性能良好,对小行星表面土壤具有良好的适应性。此外,该团队面向小行星探测需求,提出了一种新型的采用机械手指技术与爪刺附着技术于一体的刺爪锚固装置,该机构可以柔顺适应星表地形,进行附着与锚定[62]。
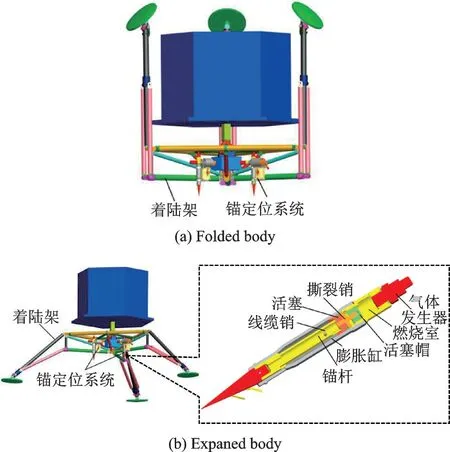
图11 刘宏团队提出的着陆/锚定机构[58-60]Fig.11 Landing/anchoring mechanism proposed by Liu Hong et al.from Harbin Institute of Technology[58-60]
综上所述,地外小天体着陆探测主要分为“接触-分离”和“着陆-锚定”两种方式。“接触-分离”成功率高,因此目前已成功完成地外小天体着陆的探测技术方案均采用此种方式。“着陆-锚定”技术方案较为复杂、技术难度大,例如采用该种技术方案的欧洲宇航局发射的“菲莱”着陆器就发生了触地反弹,未能着陆、锚定于预定的最佳着陆探测点,只完成了部分预定任务。“着陆-锚定”技术方案所需的弱引力着陆缓冲、高可靠瞬时锚定等关键技术仍需要相关机构与学者进一步研究。
2 航天器着陆缓冲机构动力学分析技术
在航天器着陆过程中,其着陆缓冲机构的运动学过程与动力学特性十分复杂,加之地外天体着陆时面临微重力、星表地形崎岖、足垫/星壤接触力学特性复杂等严苛、欠认知环境,因此在完成航天器着陆缓冲机构的缓冲方法选定与构型设计之后,需要开展大量的航天器着陆缓冲机构动力学分析,从而对机构的性能进行分析、评估与优化,对地面等效试验进行预分析与试验方案设计指导,增加地面等效试验的针对性与科学性,避免试验样机损坏、缩短研制周期。
2.1 航天器着陆缓冲机构动力学理论模型分析法
1972 年,NASA 发表了“阿波罗”登月计划着陆系统的总结报告[63],系统地介绍了“阿波罗11号”着陆器的设计历程,报告中对其着陆缓冲机构的软着陆动力学性能分析计算与等比例样机模拟试验进行了大量的详细介绍。该报告是航天器着陆缓冲机构动力学分析发展中的里程碑式成果[63]。
航天器着陆缓冲机构动力学分析面临月壤、缓冲材料与缓冲机构的耦合作用问题,在其分析过程中需要综合考虑月壤、反推火箭、铝蜂窝、拉杆以及接触/摩擦等多源非线性因素。针对上述问题,南京航空航天大学的聂宏团队[64]建立了月球探测器的月面软着陆六自由度动力学模型,如图12 所示,对其进行了不同工况下月球探测器的软着陆特性分析,探究了月面坡度与着陆速度、刚度系数与阻尼系数等对软着陆效果的影响[65],并依托所构建的航天器着陆缓冲机构动力学理论模型,探究了不同缓冲器结构参数对于缓冲性能的影响与吸收能量的分配规律,进而为着陆缓冲机构参数化设计提供指导[66]。
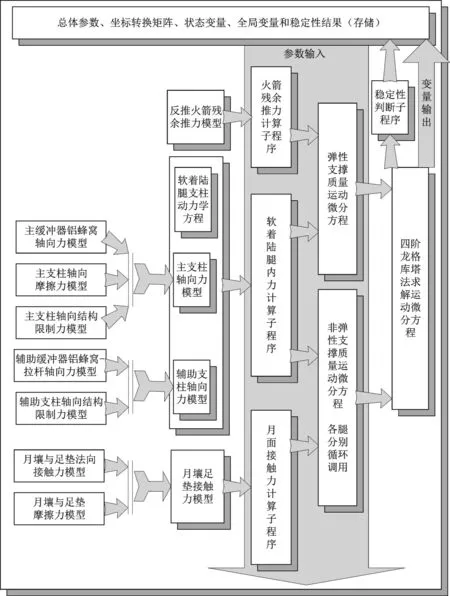
图12 南京航空航天大学聂宏团队提出的着陆器六自由度动力学分析程序开发流程[64]Fig.12 Development process of six degree of freedom dynamic analysis program for lander proposed by Nie Hong et al.[64]
由于着陆器着陆动力学模型复杂、非线性强,导致其计算分析时间较长、仿真分析难以收敛,北京理工大学的刘莉团队[67-68]针对探测器的局部非线性,提出了一种基于脉冲响应函数的模态截断准则,在广义动力缩聚方法的基础上筛选少数几阶模态影响系数较高的模态表征中心体的加速度响应,降低模型的阶数,从而在保证求解精度的前提下减少分析计算时间。
由于航天器着陆缓冲机构存在自由度多、冲击力传递路径复杂、足垫与月壤接触非线性强等影响因素,在采用理论模型分析法对着陆缓冲机构进行研究时,需要对探测器进行一定的合理简化,难以实现对着陆缓冲过程的精确模拟分析。为提升着陆缓冲机构动力学的整机建模精确性和多工况覆盖性,许多国内外学者采用动力学仿真商业软件开展了航天器着陆缓冲机构的动力学仿真分析。
2.2 多刚体动力学仿真法
多刚体动力学仿真分析方法采用矢量力学方法或分析力学方法建立探测器软着陆的刚体动力学模型,对着陆缓冲过程中的机构运动过程与动力学特性进行仿真分析。多刚体动力学仿真方法广泛应用于航天器着陆缓冲机构动力学研究中分析月表环境和着陆器初始姿态等因素对航天器着陆的影响。
JAXA 的Nohmi 等[69]在Adams 软 件 中 建 立 了月球着陆器及月壤模型,如图13 所示,研究了在考虑岩石和凹坑的月面环境下,着陆姿态角、月面斜坡和月壤摩擦力对着陆稳定性能得影响。哈尔滨工业大学邓宗全团队[70-71]针对月球着陆器等航天器研制和试验费用昂贵的问题,较早地采用Adams 动力学仿真软件对月球着陆器3 种典型结构进行了动力学建模、优化及在月球重力场下着陆缓冲等仿真研究。
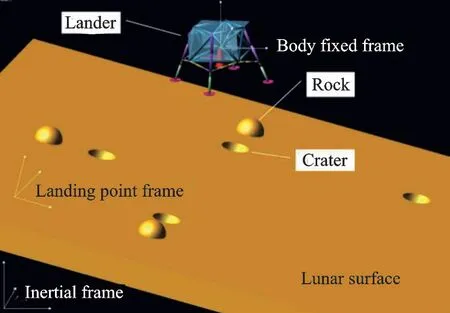
图13 Nohmi 等建立的Adams 多刚体动力学仿真模型[69]Fig.13 Adams multi rigid body dynamics simulation model established by Nohmi et al.[69]
多体动力学模型具有计算耗时短、便于参数化建模等优点,因此广泛应用于航天器着陆缓冲机构的前期设计与方案优化。北京航空航天大学的王春洁团队针对月球着陆器动力学仿真分析[72-73]、各种着陆工况对月球着陆器着陆性能的影响[74-75]、月球着陆器典型故障模型分析[76]进行了相关研究。该团队采用响应面法、NSGA-II 算法和MIGA 算法等多种优化算法对着陆缓冲机构进行了优化设计,其流程如图14 所示,提升了着陆器的抗翻倒能力和底面抗损坏能力[77-79]。重庆大学的牛伯瑶[80]提出了一种采用单出杆气体补偿磁流变缓冲器的月球着陆缓冲机构,采用Adams 对其进行了多刚体动力学仿真分析,并以磁流变缓冲器的耗能功率与工作时间为优化目标,采用基于精英策略的非支配排序遗传算法对其进行了多目标结构优化设计,减小了输出阻尼力设计冗余,降低了阻尼器的响应时间和耗能功率。南京航空航天大学的聂宏团队[81]结合某运载火箭的总体参数以及设计要求,建立了着陆缓冲机构布局优化设计的物理模型,使用多目标优化遗传算法对其进行优化,并在Adams 中建立着陆缓冲机构的动力学模型,通过仿真对比分析,优化后的结点载荷分别降低了23.15%和21.43%,有效地降低了着陆冲击过载,提高了着陆稳定性。
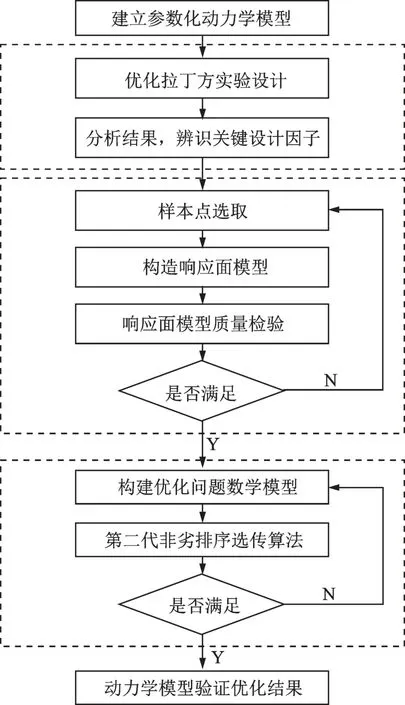
图14 王春洁团队提出的着陆缓冲机构优化设计流程[77-79]Fig.14 Optimization design process of landing buffer mechanism proposed by Wang Chunjie et al.[77-79]
多刚体动力学仿真法具有计算效率高、模拟着陆工况能力较强、便于缓冲机构参数化设计与优化等优点,因此,该方法广泛应用于航天器着陆缓冲机构的研制初期设计与优化之中。此外,依托多体动力学仿真法计算效率高和工况模拟能力强等优势,可利用该方法为缓冲机构刚柔耦合/全机柔性动力学仿真分析、地面等效试验验证提供典型工况与极限工况筛选。
2.3 刚柔耦合/全机柔性动力学仿真法
为解决多刚体动力学仿真无法分析着陆器结构变形对着陆缓冲性能影响的技术瓶颈,许多学者开展了刚柔耦合动力学仿真分析研究。刚柔耦合动力学分析方法采用基于浮动坐标系的多柔体动力学方法建立航天器的着陆动力学模型。刚柔耦合动力学仿真法可面向着陆器的具体性能分析需求,对着陆腿主支柱等关键性结构件进行柔性处理[82],重点分析着陆冲击过程中其结构变形对着陆器着陆性能的影响,如图15所示,进而为地面等效试验的极限着陆工况选取和缓冲机构优化设计提供准确指导。

图15 刚柔耦合动力学仿真中主支柱柔性影响[82]Fig.15 Impact of flexibility of main strut in rigid flexible coupling dynamics simulation[82]
随着动力学仿真软件和计算机硬件水平的提高,为了更加真实地模拟月球探测器月面软着陆的动力学过程,探究着陆过程中的诸多非线性因素影响,解决着陆器结构弹性和响应问题,越来越多的学者开始采用全机柔性动力学仿真分析法进行着陆动力学仿真分析。
全柔性航天器着陆动力学分析本质上属于非线性瞬态分析问题,常常伴随着结构的大变形或者大位移引起的几何非线性问题,因此在开展全机柔性动力学仿真分析过程中需要考虑变形对结构平衡的影响,以及结构柔性变形、机构间摩擦引起的能量耗散。2007 年,哈尔滨工业大学的邓宗全团队[83]以一种四腿桁架式可折叠月球着陆器为模型,采用MSC 公司的有限元软件Patran/Nastran 对着陆器基体的动力学特性进行了分析,得到了结构模态的影响因素,给出了样机结构的约束模态。2008年,该团队[84]以其研制的四腿桁架式月球着陆器样机为研究对象,建立了着陆器准静态稳定性条件,通过分析着陆器与月面着陆时瞬态动力学行为,得到了着陆器在此瞬态的各动力学参数计算公式,以此为依据,离散时间变量,给出了可以程序化实现整个动态着陆过程动力学模拟的计算过程。北京空间飞行器总体设计部的梁东平等[85]采用Abaqus软件建立了单腿着陆冲击有限元模型,如图16 所示,对单腿着陆冲击工况进行了动力学仿真分析,通过与试验数据的对比证明了分析结果的正确性。南京航空航天大学的聂宏团队利用MSC.Dytran 进行了着陆器整机与表壤的全柔性冲击动力学分析[41,64,86],提出了一种广义人工高斯能量计算标准,对月球/火星着陆器的机构运动性能、软着陆缓冲性能、表壤/足垫承载能力和地面适应能力进行了分析[87-88],并针对着陆器展开锁定机构[89]及着陆稳定性关键影响因素进行了相关研究[90]。
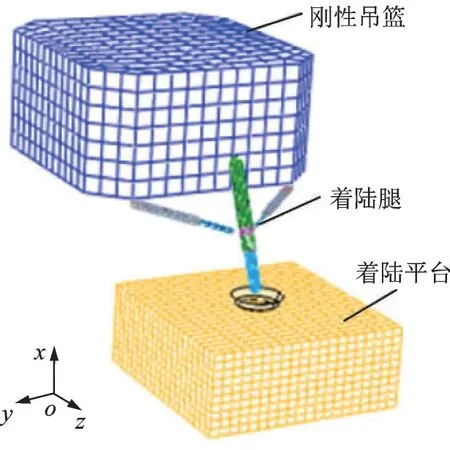
图16 梁东平等建立的单腿柔性体有限元仿真模型[85]Fig.16 Finite element simulation model of single leg flexible body established by Liang Dongping et al.[85]
相比于多刚体动力学和刚柔耦合动力学仿真分析方法,基于有限元法的全机柔性动力学仿真分析方法能够模拟、分析着陆冲击瞬间缓冲机构的结构大变形和星壤大变形等非线性因素影响,并对探测器的核心结构与关键仪器进行着陆冲击的全过程重点分析,可以更加真实、准确地反映航天器缓冲机构在着陆缓冲过程中的动力学特性。
2.4 半主动控制仿真法
针对现有着陆器无法适应复杂的着陆环境,以及在着陆过程中对突发的未知状况进行调整的技术局限,国内外许多学者开展了可控月球着陆器的设计与半主动控制仿真分析的相关研究。西北工业大学的李洪波[91]系统地分析了磁流变阻尼器的常用阻尼力模型的特点,提出了一种磁流变阻尼器软着陆缓冲系统,建立了磁流变阻尼器缓冲系统冲击时的简化模型,并对其进行了动力学仿真分析,分析结果表明磁流变阻尼器可应用于月球软着陆缓冲系统之中。
为实现磁流变阻尼器与航天器着陆缓冲机构的高效能适配,许多国内外学者开展了其半主动控制方法的相关研究,从而提升着陆器的着陆性能与星表环境适应能力。JAXA 的Maeda 等[33-34,92]提出了一种基于半主动控制的磁流变液月球着陆器,建立了其半主动控制着陆动力学模型,如图17 所示,对其控制方法与着陆性能进行了研究。图17 中坐标系为着陆器机体质心坐标系。m为着陆器机体质量,J为着陆器机体转动惯量,h为着陆器机体质心距离月面高度,r为着陆器质心投影与足垫中心距离,w为相邻两足垫中心距离,c为缓冲器阻尼系数,k为缓冲器刚度,cT为月壤阻尼系数,kT为月壤刚度,mf为每条着陆腿的质量,μ′为月壤动摩擦系数。南京航空航天大学的聂宏团队[93-94]提出了一种新型基于半主动控制的磁流变液月球着陆器,并通过半主动控制仿真,将其与传统铝蜂窝着陆器进行了着陆性能对比。仿真结果表明,所提出的新型半主动控制着陆器具有更好的着陆性能,对月面倾角和月壤摩擦系数也有着更好的适应能力。
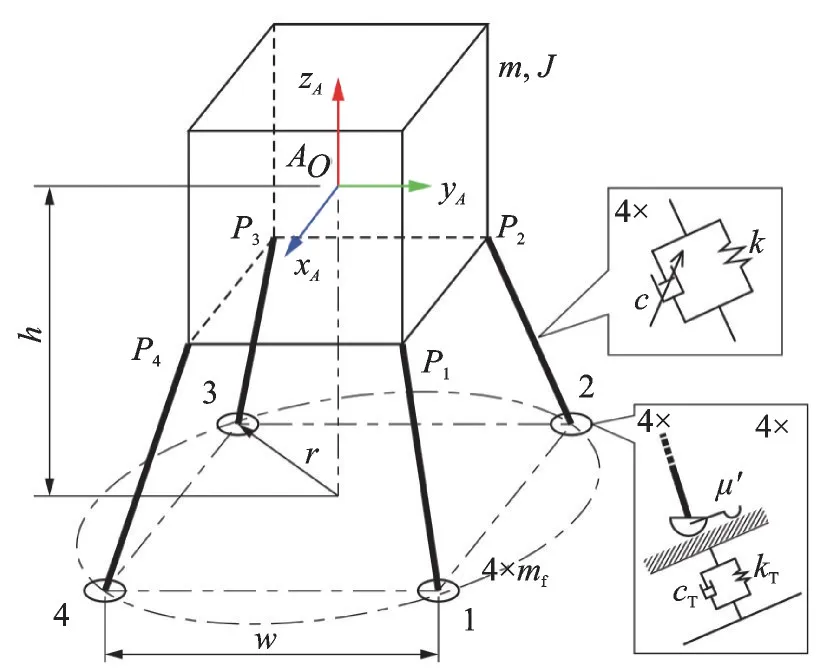
图17 Maeda 等构建的基于半主动控制的着陆器动力学模型[32]Fig.17 Dynamic model of lander based on semi-active control built by Maeda et al.[32]
缓冲力可控、地形适应能力强和着陆后姿态可恢复的着陆缓冲机构是未来航天器着陆缓冲机构发展的重要趋势。半主动控制仿真可模拟、分析航天器着陆缓冲机构在着陆过程中的姿态与缓冲力调节控制,实现着陆缓冲机构运动学参数与动力学参数的实时数据交互与反馈控制,为未来星表地形与星壤力学特性主动适应的可控着陆器设计提供技术支持。
综上所述,航天器着陆缓冲机构动力学分析可以高效率、低成本、较全面地研究缓冲机构主要参数对探测器软着陆性能的影响,支撑航天器缓冲机构的方案设计与迭代优化,为着陆器地面等效试验进行方案筛选与数据预估。在航天器着陆缓冲机构设计的初始阶段,可采用理论建模分析法和多刚体动力学仿真分析法进行辅助设计与分析,借助其高分析效率、易于构建参数化模型等优势,开展机构优化和设计迭代。在机构设计定型阶段,可采用刚柔耦合/全机柔性动力学仿真分析方法,针对核心器件及典型工况进行重点分析,提升缓冲机构性能与可靠性。
3 航天器着陆缓冲机构地面等效试验技术
航天器着陆时面临地外天体表面环境的特殊性、着陆区域的不确定性和着陆器姿态的随机误差等技术难题,其着陆缓冲机构需要具备较强的适应能力和良好的着陆缓冲性能[95]。由于航天探测任务具有成本高、可靠性要求高、天地环境差异大等特殊性,在研制过程中除开展动力学仿真分析之外,还需要进行大量的航天器着陆落震试验,获得不同着陆工况下的机构着陆性能,进而对着陆缓冲机构进行分析和优化。
地外天体的重力场、表面环境、表壤承载力学特性等与地面存在巨大差异,与航空飞行器起落架等常规地面着陆冲击试验相比,航天器着陆缓冲机构的地面着陆试验需要考虑地外天体重力场模拟、地形环境模拟和表壤性能模拟等问题。本文以最为广泛、最具代表性的月球着陆器地面等效试验技术为例进行分析。
3.1 滑轮平衡法
由于月球重力场约等于地球的1/6,滑轮平衡法采用配重质量块消除掉月球着陆器5/6的重力,确保着陆器在试验过程中受到约等于月球重力场的重力作用,其原理如图18所示,m1代表试验中的月球着陆器,m2代表配重质量块。哈尔滨工业大学邓宗全团队[96]利用此方法对某型着陆器进行了模拟月球重力的着陆落震试验,并取得了一定的研究成果。
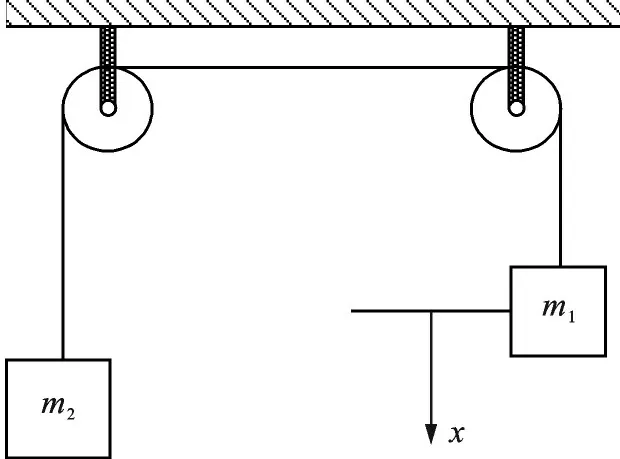
图18 滑轮平衡法Fig.18 Pulley balance method
滑轮平衡法假设系统没有摩擦,则整个系统的加速度,即模拟着陆器的加速度为

式中:g′为模拟着陆器的加速度(即所需模拟的月球重力加速度),M为模拟着陆器质量,m为配重的质量,g为地球表面重力加速度。根据式(1)可以计算得到所需配重块质量

模拟试验时,着陆器足垫与地面初始距离如下

式中:h为着陆缓冲机构足垫距地面的初始距离,vv为模拟的竖直着陆速度。
传统的滑轮平衡方法简单实用,但由于着陆落震试验过程十分短暂、冲击加速度大,因而着陆器于配重块之间的连接绳容易发生松弛,影响着陆试验效果。为解决该问题,NASA[97]提出了一种滑轮平衡法的改进方案,其原理如图19 所示。该方案中,NASA 为月球着陆器搭建了一套可自由落震的试验台,将其悬挂于滑轮系统左侧;选取大质量块1 和微调质量块2 悬挂于滑轮系统右侧。通过右侧的组合质量块,使左侧的试验平台系统以5/6的地球重力加速度做自由落体运动,试验平台内的月球着陆器以地球重力加速度做自由落体运动,在着陆器着陆到月面模拟装置后,着陆器以1/6 的重力加速度(即月球重力加速度)进行着陆缓冲。由于所搭建的试验平台质量远大于月球着陆器,因此在着陆冲击过程中,小质量的月球着陆器对滑轮系统绳子的张紧或松弛影响较小,从而实现对月球重力场进行精准模型。但是,该方法试验装置庞大、应用难度较大、试验成本较高。
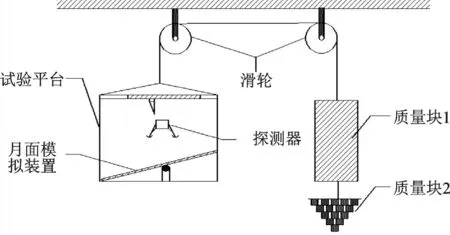
图19 改进后的滑轮平衡法[97]Fig.19 Improved pulley balancing method[97]
除上述局限外,滑轮平衡法仅能模拟竖直着陆速度,若要实现着陆水平速度的模拟,需将整个系统以一定的水平速度运动,这将大大增加设备要求与试验成本。此外,滑轮平衡法难以月表模拟斜坡、陨石与凹坑环境,无法验证着陆器的月表环境适应能力与着陆稳定性,具有较多局限性。
3.2 斜坡模拟法
为解决着陆器地面试验水平速度模拟与月表模拟问题,斜坡模拟法应运而生。美国“阿波罗”系列载人月球着陆器[97]和中国“嫦娥”系列着陆器[98]均采用了此种方法进行试验,如图20 所示,试验系统主要由吊挂缆绳、释放缆绳、模拟着陆器和倾斜着陆面等组成。
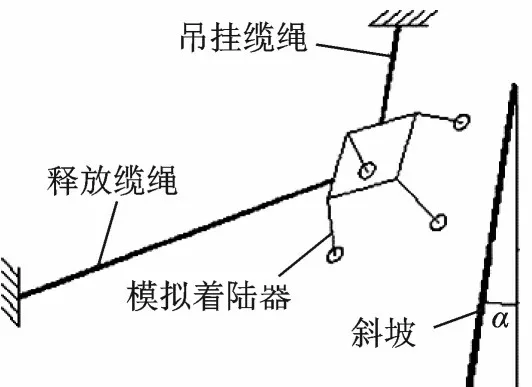
图20 斜坡模拟法示意图[98]Fig.20 Schematic diagram of slope simulation method[98]
斜坡模拟法试验时倾斜着陆面与竖直面之间的夹角α可由式(4)计算得出

在斜坡模拟试验时,可通过竖直方向和水平方向的缆绳控制着陆时的垂直速度和水平速度,并可在倾斜着陆面铺设模拟月壤、设置相应的凹凸石块,以实现对月表环境的模拟。但斜坡模拟法同样存在一定的局限性,当要模拟的加速度g′较小时,着陆面与竖直面之间的夹角α较小,难以在倾斜着陆面铺设模拟月壤。
3.3 全机1/6 尺寸模型法
美国“阿波罗”载人月球着陆器研制过程中采用了全机1/6 尺寸模型试验方法,该方1/6 六分之一,质量为原型的1/216,通过相似性转换可以较为准确地模拟月球重力场的全机月面着陆冲击过程,其试验平台如图21 所示,图中A为试验时着陆器初始释放位置,B为着陆器释放后下落过程位置,C为着陆器着陆位置。
该方法对试验装置与试验操控要求较低,只需要在试验设计与试验结果处理阶段进行相似性规律转化即可实现对着陆姿态与月球着陆环境的模拟。对于“阿波罗”系列载人着陆器等大型着陆器,其1/6尺寸模型相对容易加工,缩比样机试验也更易操作,有效解决了大型着陆器的地面等效试验难题。但对于一般的无人月球着陆器,由于其原有尺寸较小,其1/6 缩比后的零件(包括蜂窝和着陆腿结构)尺寸过小,难以加工。南京航空航天大学的聂宏团队[99]针对无人小型月球着陆器难以进行1/6 缩比加工与装配的技术难题,研制了一款1/3无人月球着陆器缩比模型,并对其进行了多工况落震试验与相似性分析。通过落震试验对着陆器的机体与足垫加速度响应、主/辅支柱的载荷和行程进行了采样测量,并将其与动力学仿真分析结果进行综合对比验证。
综合对比上述几种地面等效试验方法可以看出,传统滑轮平衡法模拟效果受限、试验成本低,适用于科研机构和高等院校进行着陆缓冲机构学术研究和原理样机验证分析。而改进滑轮平衡法和斜坡模拟法的可等效模拟内容多、等效性强,适用于航天工程单位进行型号正样的试验验证分析。全机1/6 尺寸模型法兼具可等效模拟内容多和试验成本低等优势,但缩比试验样机的研制加工、试验方案的相似性转化等流程较为繁杂。上述地面等效试验方法主要优缺点对比如表3 所示。
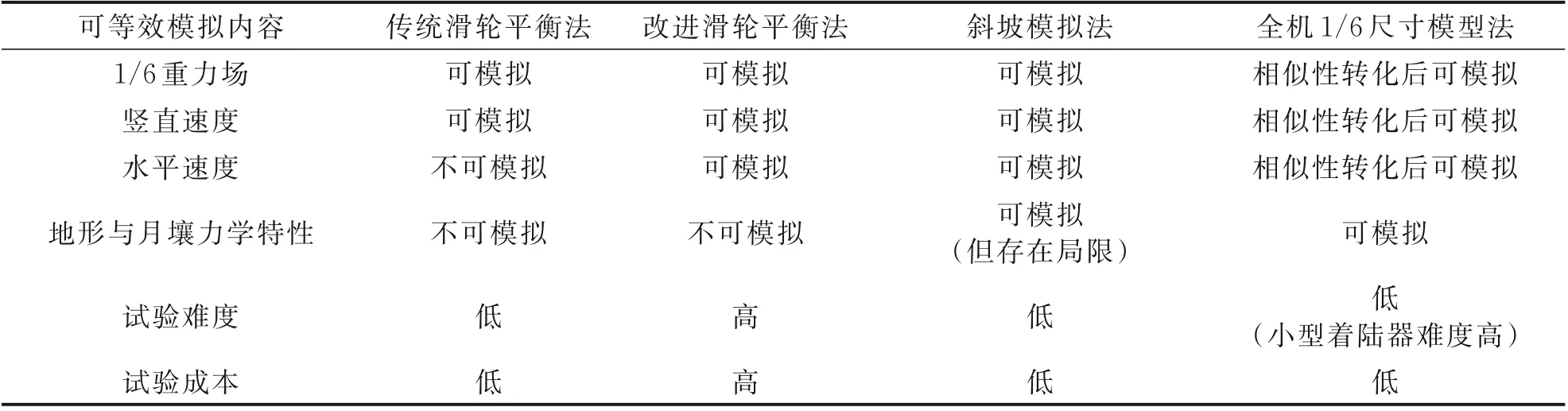
表3 地面等效试验方法对比Table 3 Comparison of ground equivalent test methods
4 航天器着陆技术现存问题与发展趋势
经过60 余年的发展,航天器着陆缓冲机构技术取得了巨大进步,航天器着陆机构研制与工程应用、动力学仿真分析和地面等效试验等领域均取得了长足的发展,但同时遭遇了诸多技术瓶颈。随着人类对航天探测需求的不断增长、探测范围的不断扩展、探测精度的不断提高,航天器着陆技术势必面临着越来越多的科学问题与技术挑战,需要国内外研究机构和研究人员的进一步探索。
4.1 航天器着陆技术现存问题
(1)着陆缓冲方法地形适应性差、无法实现多次使用
目前航天器着陆缓冲方法仍以塑性变形法等被动式缓冲吸能方法为主,对于半主动、主动缓冲吸能方法的研究相对较少,距离将新型可控缓冲器转化到航天器型号的实际应用仍有很大距离。面向未来探测范围更广、探测任务内容更丰富的地外天体探测需求,现有被动式缓冲吸能方法难以在崎岖、阴影环境下的地形中实现自适应缓冲,大大限制了人类深空探测的脚步。此外,现有塑性变形缓冲方法仅能实现单次着陆缓冲,且完成缓冲后无法进行探测器姿态的恢复和调整,难以满足未来地外天体高频率、低成本、多点多次着陆探测的任务需求。
(2)缺乏系统化、全流程着陆缓冲机构构型设计理论
目前,航天器着陆缓冲机构构型设计仍主要基于已有构型方案、仿真与试验分析、生物形态模仿等方法,更多的是基于前人经验和试验数据,加之航天任务的高可靠性要求,导致航天器缓冲机构容易发生过度设计、安全冗余度过高的问题。航天器着陆缓冲机构属于多自由度并联机构,近年来工业机械领域的并联机构学理论研究取得了长足的发展,而针对航天器着陆缓冲机构构型所需的系统化、全流程设计理论的相关研究仍相对较少,这已成为航天器着陆缓冲机构设计与研制过程中的短板。
(3)着陆缓冲机构功能集成度低、任务扩展性差
目前月球探测器由着陆器和巡视器组成。着陆器不能行走,仅能携带巡视器和探测仪器在月表安全着陆;巡视器只能用于在月表开展行走探测。以“玉兔二号”巡视器为例,其移动速度仅为200 m/h,探测范围亦受到着陆区域环境(斜坡、岩石等)的严格限制[100]。现有探测方案中,着陆缓冲机构仅具备单一的着陆缓冲功能,巡视器仅能完成小范围、低速度的巡视探测任务。上述技术难以满足未来月球无人科考站组建任务中多种、大量装备和物资的着陆、转运和组装等任务需求。
4.2 航天器着陆技术的发展趋势
2022 年,中国国务院新闻办公室发布的《2021中国的航天》白皮书指出:未来五年,中国将继续实施月球探测工程,发射“嫦娥六号”探测器、完成月球极区采样返回,发射“嫦娥七号”探测器、完成月球极区高精度着陆和阴影坑飞跃探测,完成“嫦娥八号”任务关键技术攻关,与相关国家、国际组织和国际合作伙伴共同开展国际月球科研站建设。除月球探测任务外,中国将继续实施行星探测工程,发射小行星探测器、完成近地小行星采样和主带彗星探测,完成火星采样返回、木星系探测等关键技术攻关[101]。上述各类地外天体大气环境、重力场和着陆探测区域的星表地形环境更复杂、相关已知信息更少,探测任务中的星表探测和移动范围更大。
现有航天器着陆技术所存在的缓冲方法着陆环境适应性弱、缓冲机构设计理论系统性差、缓冲机构功能集成度低等科学与技术问题亟需解决。在国家重大深空探测任务牵引下,针对未来的高频率深空探测、单次发射多任务内容等具体任务需求,对未来航天器着陆技术的发展趋势展望如下:
(1)可重复使用的缓冲方法研究
面向未来高频率、低成本的深空探测需求,重点针对现有具备多次吸能能力的塑性缓冲方法、可重复使用的磁流变液缓冲方法展开研究,研制可重复使用的航天器着陆缓冲机构,将着陆器和巡视器融为一体(即探月飞跃器)[102]。飞跃器利用脉冲喷射器实现月面低空飞行,在多个预定探测点进行着陆,实现高速率、大范围的多点多次着陆探测,进而减小探测器质量,降低探测经济成本,提升探测效率与范围。
(2)星表地形与星壤力学特性主动适应
面向未来月球/火星中央丘陵、峡谷、极区等崎岖地域探测需求,需开展着陆缓冲机构构型设计理论的体系化、全流程化研究,提升新型缓冲机构构型与可重复使用、可缓冲方法的适配效果。实现航天器着陆缓冲机构星表地形与星壤力学特性主动适应,在着陆过程中实现多套着陆腿共同触地缓冲,并根据足垫-星壤接触力进行各着陆腿的缓冲力调整,确保着陆冲击能量的高效、平稳吸收,实现航天器在崎岖地形下的稳定着陆,降低着陆过程中的冲击过载。
(3)着陆缓冲与行走一体化设计
面向未来月球无人科考站及月球基地建设需求,需结合腿式机器人的运动原理与设计方法,开展着陆缓冲与行走一体化设计,设计缓冲和移动性能综合最优的着陆器新构型,进行步态规划和控制策略研究,将仅具备单一着陆功能的航天器缓冲机构扩展为具备着陆缓冲、姿态调整与运输行走多功能于一体的月表航天器智能机构,支撑未来月球科考站与月球基地建设中的装备投放、物资运输与平台对接组建。
5 结束语
本文综述了目前国内外航天器着陆缓冲机构技术领域的相关研究进展,并结合未来深空探测需求,对航天器着陆技术存在的问题与发展趋势进行了分析与展望,对于我国深空探测着陆缓冲机构技术研究具有一定的指导意义。
猜你喜欢
国际太空(2022年7期)2022-08-16
轻兵器(2022年3期)2022-03-21
铁道车辆(2021年4期)2021-08-30
航天器工程(2019年4期)2019-11-11
国际太空(2019年9期)2019-10-23
国际太空(2018年12期)2019-01-28
伙伴(2019年12期)2019-01-17
中国设备工程(2018年21期)2018-11-14
国际太空(2018年9期)2018-10-18
北京航空航天大学学报(2017年4期)2017-11-23