
基于机器视觉的车标标记与识别系统的设计
2022-10-31 11:31贾尚云高晓阳郑博博李红岭杨梅周蓓蓓
农业装备与车辆工程 2022年8期
贾尚云,高晓阳,郑博博,李红岭,杨梅,周蓓蓓
(730070 甘肃省 兰州市 甘肃农业大学 机电工程学院)
0 引言
随着汽车数量的急剧增加,车标的识别与检测成为目前在道路交通监管方面研究较多的课题之一。受外界环境影响,如白天与黑夜光线变化、道路灰尘的遮盖、季节更替等,车标的识别与检测精度不够理想[1-2]。通常情况下,采用红外线照明摄像或者运用比较特殊的光线传感器的检测方法,检测成本较高,难以普遍推广[3]。本文结合图像处理技术设计的汽车车标检测与识别系统,不仅提高了识别的准确率,而且造价较低,在车标检测与识别方面具有很好的应用价值。
1 设计方案
该系统以计算机硬件为主体,以MATLAB 软件为核心,设计了一套基于机器视觉的车标检测与识别系统。系统总体设计主要包括:车标图像采集与显示、图像预处理、图像的检测标记与识别,其中图像预处理包括灰度化、边缘检测、列检测以及图像的闭运算。系统结构框图如图1 所示。
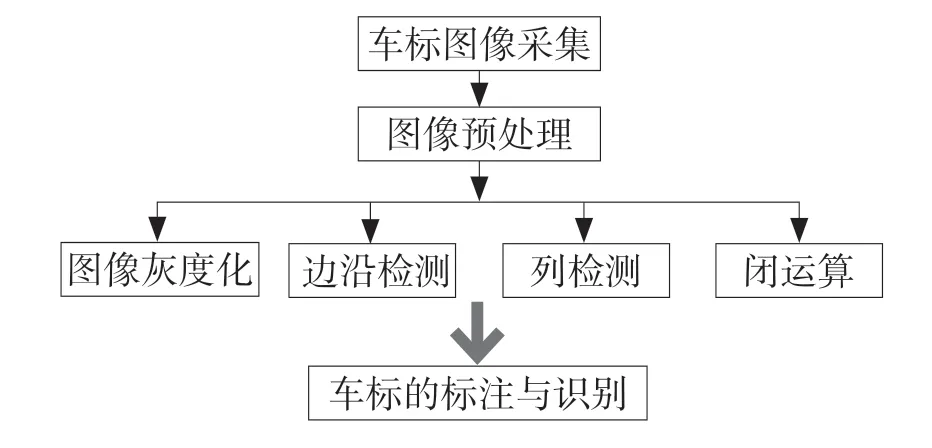
图1 系统总体框图Fig.1 System overall block diagram
系统开始工作前首先进行大量的车标图片数据的采集,然后将采集到的车标图片进行训练得到训练集,再进行图像预处理工作,得到处理后去除噪声和干扰的图片,最后进行车标检测和识别。为保证系统的可靠性、降低干扰,车标图片采集需要在相同的天气环境和相同的时间进行。
2 图像处理
图像预处理可消除图像中的无关信息,增强真实信息的可检测性,提高车标的检测与识别的准确率[4-5],本系统借助MATLAB 软件对采集到的车标图片进行图像灰度化、图像的边缘检测、图像的列检测和图像的标记检测,达到了车标检测和识别的目的。
2.1 图像的灰度化
彩色的图像中包含着许多颜色信息,在图像识别过程中会降低MATLAB 的处理速度,所以在对车标图像进行标记与识别时需要将图像进行灰度化处理。经过灰度变换后,图像像素的动态范围会增加,图像的对比度扩展,图像变得更加清晰、细腻且容易识别。图2 为原始图像经灰度化后的图像。

图2 图像灰度化Fig.2 Image grayscale
2.2 图像的边沿检测
2 个相异的灰度值的相邻区域之间总存在交叉的边沿,边沿检测是图像分割、特征提取等图像分析的前提。通常通过门的极限法来确定一个值或者一个点是否实用有效,所以如果一个有效点的二维1 阶反导数比所指定门的极限大,就可以定义所处理的图像中的一个次点就是一个边沿点。经过1 阶或2 阶导数的图像的边沿检测,求得的1 阶导数值若高于某个临界点的阈值,则确定这个点为所求的边缘点。但是这样做会导致所检测的边沿点超出太多,所以可以利用对梯度局部求解得到所需要的最大值对应点,并确定这个点为所需要的边沿点,去除非局部边沿的最大值,可以检测出所得的边沿。如图3 所示为图像的边沿检测。

图3 图像边沿检测Fig.3 Image edge detection
2.3 图像的列检测
图像的列检测就是对图像进行左右检测,去除上下图像对车标检测与识别的影响,保留左右所需要的图像,以客观操作达到主观效果,图像的列检测与图像增强处理的最大区别是,图像的增强处理是将灰度化图像与所得的背景图像作程序的减法处理,然后运用程序对所得图像进行增强处理,达到对所需图像的增强;图像的列检测是对上下图像的剔除,保留左右图像。图4 为图像的列检测结果。
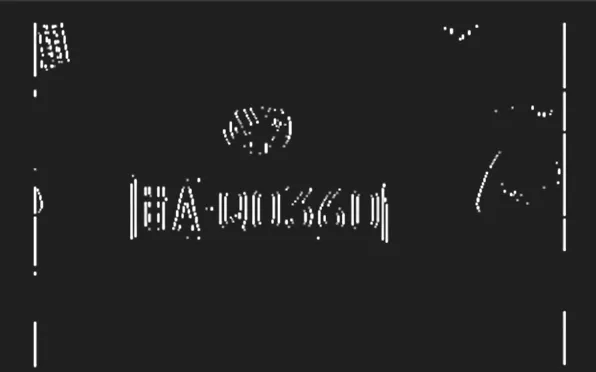
图4 图像列检测Fig.4 Image column detection
2.4 图像的闭运算
图像的闭运算就是对图像进行数学上的闭合运算,其目的是为了突出车标与车牌的部分领域,使其实化,达到图像的小型处理。图像的腐蚀是一种对边界点进行消除的方式,其作用是可将所需要的图像目标缩小,孔洞变大,能有效消除被孤立的噪声点。而膨胀的作用是将与现存的物体相接触的所有背景点合并到物体内部,这样做的结果与腐蚀的恰恰相反,能让目标增大,孔洞变小,填补了现存目标物体内部的空洞,形成一个连通域。
对图像进行先膨胀后腐蚀的过程叫做图像的闭运算,其特点是可以填充物体内部一些细小的空洞,以达到对邻近物体的连接和对边界平滑的作用。如图5 所示为图像的闭运算结果。

图5 图像闭运算Fig.5 Image-closed operation
2.5 图像最小目标的去除
因为目标图像中含有车标图像、车牌图像、轮廓图像等一系列图像,而我们仅需对车标进行检测与识别,因此就需要对目标图像进行整理,去除轮廓图像。如图6 为图像最小目标的去除结果。

图6 图像最小目标的去除Fig.6 Removal of image minimum targets
2.5 车标的标记与识别
车标的标记检测是将图片中车标所在的位置标记出来,同时达到图像校正的目的[6-8]。图7 所示即为车标的标记与识别结果,系统能够正确识别汽车标志,且识别率较高。

图7 车标标记与识别Fig.7 Vehicle logo marking and identification
3 结果与分析
本文通过对车标的检测与识别的算法研究,并进行大量训练、检验与分析,得到了对车标的检测与识别结果。在此过程中,首先要采集大量车标图片输入MATLAB 软件进行图像预处理。图像采集统一选择在下午6 时,这时的太阳温和、光线充足,降低了太阳光线和噪音的干扰,使用同一个相机进行采集,避免由于像素差异引起图像检验结果的不准确性。实验表明,该系统检测效率高,检测精度和稳定性好。如图8 所示为实验验证结果。

图8 实验验证结果Fig.8 Experimental validation results
机器视觉的算法需要对车标进行大量的训练,然后进行匹配,由于车标的种类繁多,有些车标在训练时没有统计进去,降低了对一些特殊车标的检测与识别的正确率。今后的研究应加大对训练集的扩充,达到应检尽检的目的。
猜你喜欢
农业工程学报(2022年8期)2022-08-08
健康体检与管理(2022年4期)2022-05-13
包装工程(2022年9期)2022-05-13
化工进展(2022年3期)2022-04-12
集装箱化(2021年1期)2021-04-12
中国信息技术教育(2020年2期)2020-02-02
证券市场红周刊(2018年41期)2018-05-14
证券市场红周刊(2018年33期)2018-05-14
证券市场红周刊(2018年5期)2018-05-14
证券市场红周刊(2018年4期)2018-05-14
