
电气自动化控制系统路径优化方法设计
2022-10-29 06:23潘世丽张晓萍
制造业自动化 2022年10期
潘世丽,张晓萍
(苏州大学 应用技术学院,昆山 215325)
0 引言
电气自动化控制是当前工业发展与科技发展相结合形势下的一门新兴学科,在国防工程、远程监控等领域中都具有广泛的应用。电气自动化控制系统在实际应用中,控制精度能否达到领域标准要求是重要的评判指标,因此提升电气自动化系统的控制精度是相关行业研究人员一直关注的热门问题[1]。电气自动化控制系统在应用中能够有效提高生产效率,但是就目前我国的技术来说,对设备进行精准控制的精度还有一定程度的优化空间。随着电气自动化控制系统的发展,在实际的控制运行过程中具有多样性和灵活性,电气自动化控制系统的发展也向着简易化和信息化的方向迈进。
为了提升电气自动化控制系统在实际应用过程中的控制精度,一般会应用相关的电气自动化控制系统精度优化方法来提升系统的控制精度[2]。以往使用的基于PID控制的精度优化方法中,针对机器人的移动过程中的控制缺乏定点优化分析,导致机器人移动过程关节控制精度降低,角速度发生突变,影响机器人的正常工作和移动性能,基于此本文设计一种基于路径优化算法的电气自动化控制系统精度优化方法。
1 基于路径优化算法的电气自动化控制系统精度优化方法设计
1.1 电气自动化控制系统交流变频电机数学建模
本文在研究中主要以机器人移动过程中的控制为研究对象,针对电气自动化设备中的交流变频异步电动机来说,想要得到交流变频控制的数学模型,首先要对旋转磁场的同步转速n0与电动机频率之间的关系进行明确。通过对大多数的设备进行数据分析与研究,得到的旋转磁场的同步转速的计算如式(1)所示:

式(1)中,f表示电动机中的定子频率,p表示磁极对数,此时在机器人移动过程中三相异步电动机轴上输出的转速计算如式(2)所示:

式(2)中,S表示机器人三相异步电机的旋转速度差值。机器人三相异步电机在受到电气自动化系统控制的过程中,需要进行变频调速,此时流经三相异步电机的主磁通值对于电气自动化控制系统来说,具有较大影响。主磁通值过大或过小都会影响电机带负载的能力和电流负载分量,因此需要以电气自动化控制系统交流变频电机为基础,保证控制过程气隙磁通的恒定[3]。为了保证数学建模过程的简洁与流畅,根据电机学理论[4],对电气自动化设备的电机条件进行假定,忽略电机控制过程中的反应时间和空间谐波,且对于电机中的线圈来说,磁饱和,并忽略铁心在控制过程中由于电磁感应所产生的损耗。在以上条件下,建立电气自动化控制系统交流变频电机的数学模型,能够更好地反映出电压与频率之间的变化特性。电机中的交流变频器在运行过程中,主要是利用PLC对变频器进行控制。
本文使用的PLC通过向变频器输入PLC指令运算结果,通过变频器计算得到相应的频率与定子供电电压的值,对于变频器来说,将电压信号表示成变频器的规定信号,此时变频器加速时间在阶跃响应时能够分解得到电压信号下的两个斜坡函数,可以表示为:

式(3)中,τ表示变频器加速时间,K表示主磁通量,在以上斜坡函数方程组的函数表示下,能够得到电气自动化控制系统交流变频电机在变频控制调速的基本控制特性,如图1所示。

图1 交流变频电机基本控制特性
当控制过程中的频率变大时,实时电压会受到额定电压的限制,在一定范围内发生变化而无法持续增大。
1.2 基于路径优化算法的控制流程
在电气自动化控制系统中,将衍生的控制信号作为控制过程中的变量,衍生的控制信号共有三个,分别为C1、C2、C3,根据由控制精度优化方法中的设定,将变量中的5个有效数字作为路径优化算法的信息依据,并将其有效的描述在坐标平面中。此时在该坐标平面中存在上百个节点,各个节点的坐标中能够描述控制信号的信息。在路径优化算法中,主要是对蚁群寻优路径进行优化。假设蚁群算法中某抑制蚂蚁以坐标原点作为起点,在蚂蚁爬行过程中达到坐标中随机一个点之后,即判定为实现一次循环。所以此时的路径优化算法在控制过程中,必须根据参数进行调整[5]。将蚁群计算的种群数量设定为n,将所有蚂蚁途径的节点纵坐标数和路径属性都存储到各个节点中。此时将路径优化算法初始化,计算蚂蚁在路径寻优过程中的节点转移概率,计算过程如式(4)所示:

式(4)中,δ表示局部信息的素参数,在赌轮选取过程中的选取方法对后续节点进行筛选,各个蚂蚁经过坐标系中的各个节点之后,都会分别在节点中完成局部信息素的刷新。在路径优化过程中,能见度因素的重要性和信息素轨迹重要性共同决定了蚂蚁下一步选取的节点。信息素轨迹重要性的计算公式为:

式(5)中,Pi表示局部信息素的自适应调节的最大值,Sroad表示经过节点的行走路径,Δψij表示路径单位长度的轨迹信息素强度。假设某蚂蚁爬过的路径参数能够通过公式进行计算,并在计算机中进行仿真,此时能够获取到电气自动化控制系统中的性能指标。此时控制杂交约束变量的值,令基本位变异方案运算参数值,如果获取到的性能相关指标与目标函数相近,此时的变异需要保留,如果与目标函数相差较多,那么需要去除变异。在算法的控制过程中,需要按照参数整定的方法来计算中运算过程中的模糊蚁群参数,在确定好蚁群的种群树木之后,利用各个蚂蚁在寻优过程中经过的节点属性信息,作为蚁群路径优化过程中的重要数据。在路径优化算法中,将各个蚂蚁放在起点,相当于路径优化算法的数据初始化,路径优化算法对于全部蚁群来说,如果没有收敛到相同的路径上,则需要重新设定变量对比参数,选取后续节点。假设选定的变量在初始设定的过程中数值为1,那如果存在参数的参考范围为P<P0,那么需要计算出蚂蚁在优化过程中,在所有节点位置上的转移几率。计算公式为:

式(6)中,δ(t)表示蚂蚁在不同节点上的信息素参数,能够描述节点的状态。利用上述公式通过赌轮的方法来选取后续的节点,并将得到的值进行导入,描述出蚁群后续的节点选择方式。当蚁群中的蚂蚁各自经过一个节点之后,需要重新刷新信息素,根据新的参数改变信息素的挥发参数。按照蚂蚁在寻优过程中所走过的路径,计算各个蚂蚁路线的相应寻优参数,获取整个优化过程的性能指标,并调整稳态误差。在完成一个周期的迭代之后,能够记录到该周期内的最佳路径和性能指标。在下一次迭代循环中,使用单点的交叉策略,衍生新的路径,使用基本的变异方案,令性能指标接近目标函数,完成信息素的更新、蚁群算法中所有的蚁群都收敛到统一路径上,此时的循环停止,得到最佳的控制参数。如果蚁群没有收敛到相同的路径,则需要再次选取后续节点,进行下一周期的循环,直到获取最佳路径参数。至此完成基于路径优化算法的电气自动化控制系统精度优化方法的设计。
2 实验设计
2.1 实验平台设计
针对本文设计的基于路径优化算法的电气自动化控制系统精度优化方法,需要在本章设计实验。首先设计实验平台,本文将设计的精度优化方法应用到机器人电气自动化控制系统中。首先要设计实验平台,在实验平台中,实验平台主要包括机器人、机器人控制柜。实验中选择的机器人为六自由度机器人,实验中由工业控制计算机通过以太网连接机器人控制柜,机器人控制柜直接控制机器人,其内部结构主要由运动控制器、伺服驱动器组成,控制柜作为整个控制系统的核心,控制着机器人运动过程中的所有动作。根据选择的六自由度机器人的本体坐标系分布情况,得到机器人的D-H连杆参数情况如表1所示。

表1 实验六自由度机器人连杆参数
本文所选择的实验机器人的最大移动速度能够达到2000mm/s,机器人运动过程中最大切向运动重复定位精度能够达到±0.02mm。在整个实验平台中,选择的交流伺服驱动器需要支持Ethercat总线协议,选择的运动控制器能够在实时操作系统中利用实时插补保证控制精度。在实验选择的传感器模块中,内置了三维加速传感器,能够测出机器人在三个方向上的加速度值。三维加速传感器的量程为±300m/s2,实际的加速度计算如式(7)所示:

式(7)中,Vout表示传感器的输出值,Vref表示传感器的原始输出值,Vmax表示传感器的最大值,amax表示传感器的最大量程,即±300m/s2。在以上设计的实验平台中,分别使用本文设计的基于路径优化算法的电气自动化控制系统精度优化方法和传统的基于PID算法的精度优化方法进行测试,在机器人的移动末端,放置最大载荷重量内的负载,并在机器人运动空间中获得10个示教点,获取到这些点在基坐标系下所对应的坐标位姿以及机器人各个关节的速度变化情况,并对实验结果进行对比与分析。
2.2 实验结果分析对比
根据上文所设计的实验,分别得到本文设计的基于路径优化算法的电气自动化控制系统精度优化方法和传统的基于PID算法的精度优化方法下的示教点基坐标下的位姿,如表2所示。

表2 两方法下示教点位姿数据
根据两种方法所得到的示教点的数据,将以上数据进行全局插值,生成不同关节在不同时间的关节角速度变化的曲线,如图2所示。
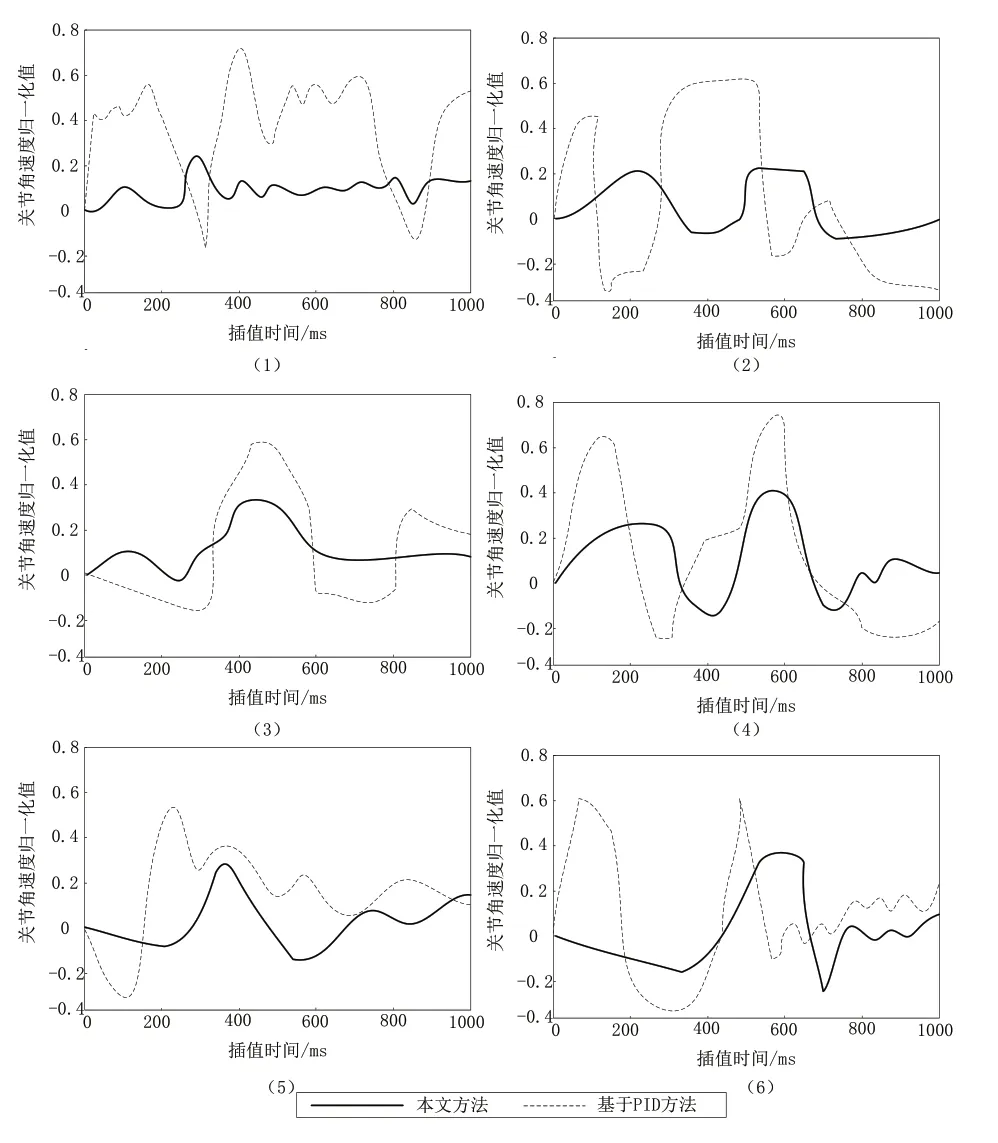
图2 两种控制精度优化方法下的关节角速度变化曲线对比
图2中,图2(1)~图2(6)分别表示测试对象六自由度机器人在电气自动化控制系统的作用下,移动过程中的六个关节的角速度变化曲线。从上图中可以看出,在本文控制精度优化方法下,机器人在运动过程中,自身的不同关节的角速度变化更加平滑,没有大的速度突变,角速度变化范围在0.4~-0.2rad/s之间,关节角速度的变化值虽然会出现一些波动,但是存在的波动都保持在正常的变化范围内;但是在传统基于PID控制精度优化方法下,机器人的各个角速度变化有明显且陡峭的波峰波谷,且角速度的变化范围最大达到了0.5rad/s,最小达到了-0.4rad/s,且存在速度突变的情况。对比两种控制精度优化方法,本文设计的方法优化效果更明显,能够有效控制关节速度的变化抖动。
3 结语
本文在路径优化算法的基础上重新设计了电气自动化控制系统精度优化方法,通过重建电气自动化控制系统交流变频电机数学模型,同时对蚁群算法寻优过程中的路径进行优化过程的演变对控制精度进行优化,实现了基于路径优化算法的电气自动化控制系统精度优化方法的设计。并且通过对六自由度电气自动化机器人控制系统进行测试,验证了该方法与传统方法精度优化结果的可靠性,本文的设计对于未来电气自动化精准控制系统的发展来说,提供了有力的保障。
但是由于时间、经验等方面的限制,本文方法还有很多不足之处,例如在使用过程中受到外界环境干扰的影响比较大,在使用过程中需要对机器人等电气自动化设备的运行环境需要全面了解才能保证精度优化方法生效。在后续的研究过程中,还要继续完善方法的鲁棒性,保证控制精度优化方法在大范围情况下使用的适普性。
猜你喜欢
中国自行车(2022年6期)2022-10-29
导航定位学报(2022年5期)2022-10-13
一重技术(2021年5期)2022-01-18
建材发展导向(2021年14期)2021-08-23
建材发展导向(2021年12期)2021-07-22
建材发展导向(2021年10期)2021-07-16
宇航计测技术(2018年3期)2018-09-08
物联网技术(2017年7期)2017-07-20
华人时刊(2016年16期)2016-04-05
纺织导报(2014年9期)2014-10-31
