
机动式通用发射平台设计与实现
2022-10-27 02:44:10付京来
计算机测量与控制 2022年10期
付京来,齐 跃
(1.中国人民解放军91851部队,辽宁 葫芦岛 125001;2.中国人民解放军92941部队,辽宁 葫芦岛 125001)
0 引言
发射平台是导弹发射武器系统的重要组成部分[1-2],能够完成火箭导弹的贮存、运输、待机和发射任务,在防空武器系统的全作战流程中具有重要作用和地位[3]。目前,防空兵器空中靶标[4]的陆基发射装置有4种方式:第一种是固定倾斜式发射基座,利用地脚螺栓将发射架固定在水泥场坪上;第二种是固定可回转变仰角式发射基座,通过回转和俯仰两个方向上的旋转和调整完成特定任务;第三种是通用地基环式,此方式是在预先选取的固定发射场浇筑两个同心环,将发射架通过特制的固定装置刚性连接,优点是可适应多型弹种;前3种方式均在固定阵地实施,且水泥场坪需满足一定强度,可选用的发射点位数量较少,这样就造成了试验方案组织模式简单,试验航路设计相对单一的局面;而第四种方式则无需固定水泥场坪,即机动式变仰角发射平台,采用底盘+上装平台完成机动化发射任务,但局限于设计时的技术水平和制造工艺,发射平台大多为一车一型。
近些年来,发射装置正向通用化、多用途方向发展,其通用化具体的表现形式逐步由一平台一负载向一平台多负载、多平台一负载等方向发展。以美国和俄罗斯为例,两国十分重视发射装置通用化[5],例如美国具有代表性的是M270式多管火箭炮发射装置,可以实现2型弹种(标准火箭弹和ATACMS导弹)的共架发射;俄罗斯的S400系列采用导弹共架混装方式,其装载的任务单元为3大4小(3大:48N6E2导弹,4小:9M96E2导弹)。
随着使命任务的不断拓展和深化,某部相继配发了多型空中靶标地面支持系统。每型系统具有各自独立的发射保障设备,但各个设备技术状态不完全一致,保障难度很大。引入一体化设计方法,设计了一型机动式通用发射平台,采用可编程逻辑控制器(PLC)[6]开放式标准模块化架构和国产化VLadder6.20梯形图编程软件、易控天地2.0组态软件,实现了多弹种共架发射、高精度自动调平、机动性强、状态信息监测全等功能指标,从而使试验航路设计更加灵活,试验想定更加贴合实际。采用一套系统可完成以往需要20余套分离设备才能完成的发射保障任务,有效提升了空中靶标地面支持系统的技术水平和保障能力。
1 系统主要功能
某型通用发射平台为机动式、变仰角发射平台,系统功能如图1所示。系统应具有以下主要功能:
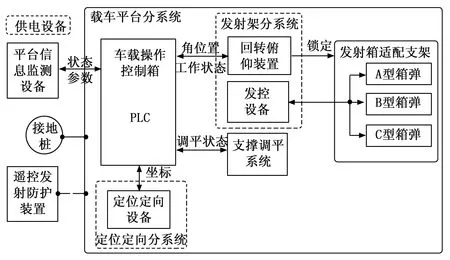
图1 系统功能框图
1)载车平台分系统是发射架分系统、定位定向分系统、箱弹等装载平台。用于装载发射架和箱弹等任务设备,可将发射箱适配支架转运到发射阵地,能够自动调平、支撑[7],为箱弹提供良好的贮存、待机、发射条件;
2)定位定向分系统能提供载车在发射阵地的坐标信息,并可根据需要对发射架分系统方位进行校核;
3)发射架分系统按照系统的指令,实现俯仰机构和回转机构的瞄准运动,赋予空中靶标初始发射角,并反馈发射架分系统的工作参数和状态;具备到位后手动锁定功能;
4)发射箱适配支架,用于装载箱弹,通过更换适配支架可满足三型箱弹接口的装载任务,同时经适应性改进可装载后续型号箱弹,并完成单发或双发发射任务,同时具备足够承载能力,满足俯仰或指向运动、发射等过程中的力学冲击;
5)具备遥控发射操作人员、载车底盘及车载设备的防护功能。
2 系统硬件设计
2.1 系统硬件组成和工作原理
机动式通用发射平台主要由载车平台分系统、发射架分系统、定位定向分系统、控制系统、辅助设备及软件等组成,系统组成框图如图2所示。平台采用“基准载车平台+单/双号位可调支架”总体架构,满足三型箱弹野外机动发射任务。
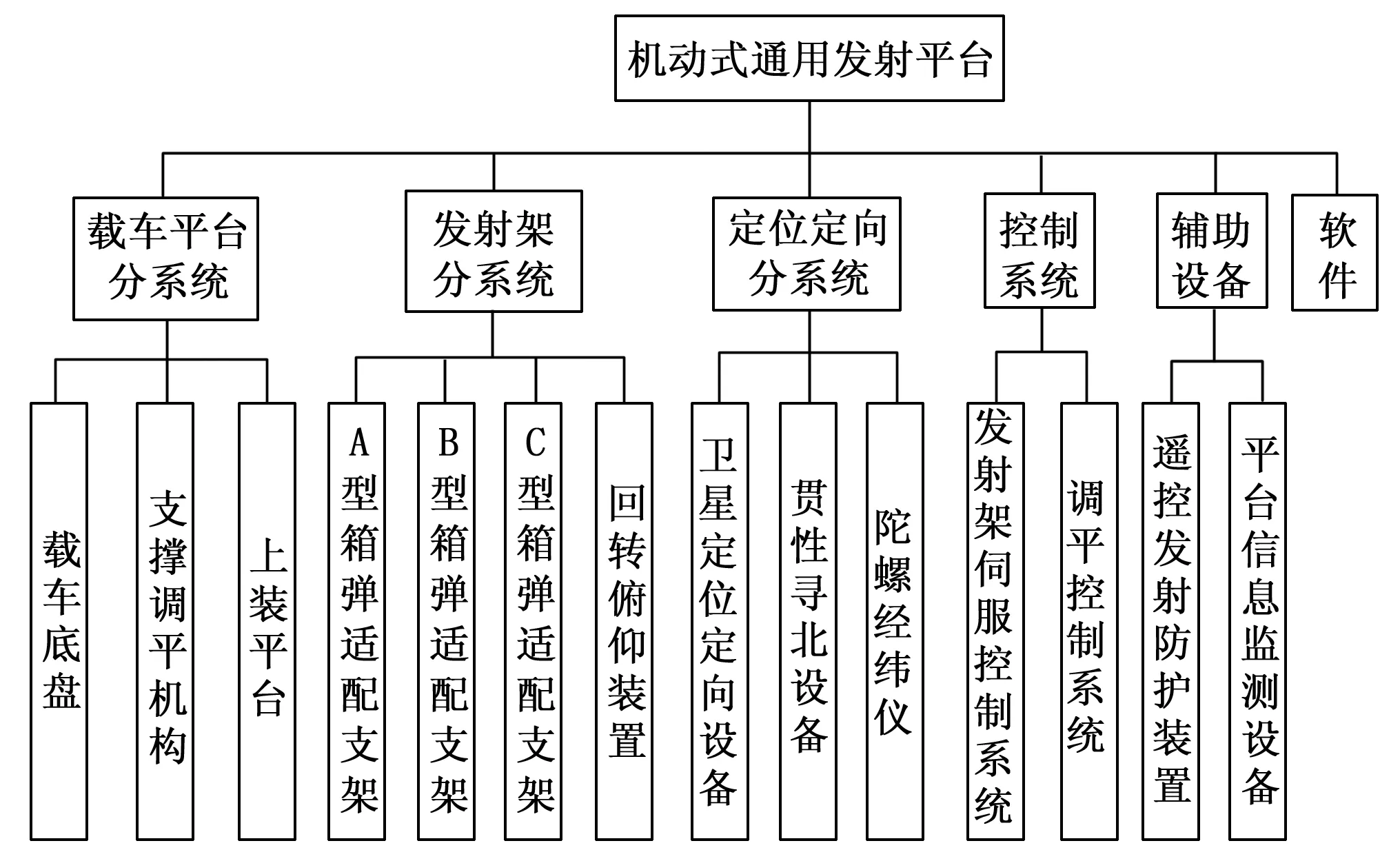
图2 系统组成框图
平台以PLC控制器为中心,其它设备通过RS422/CAN通信与之交联,控制系统工作原理如图3所示。倾角传感器将测量的载车底盘纵轴和横轴的角度信息发送给PLC,PLC按照编写的调平控制程序调节液压阀流量,实现对油缸动作速度的调节,油缸推动4个调平支腿平伸、垂顶,实现载车底盘自动调平;PLC接收人机界面输入的发射架指定角位置数据,与发射架当前实际角位置数据比较,按照规划的控制规律解算出失调角,输出控制信号通过伺服驱动器驱动电机工作,电机通过传动装置拖动发射架转动到指定角位置;定位定向设备主要提供载车在发射阵地的坐标信息,为供靶方位角提供依据。
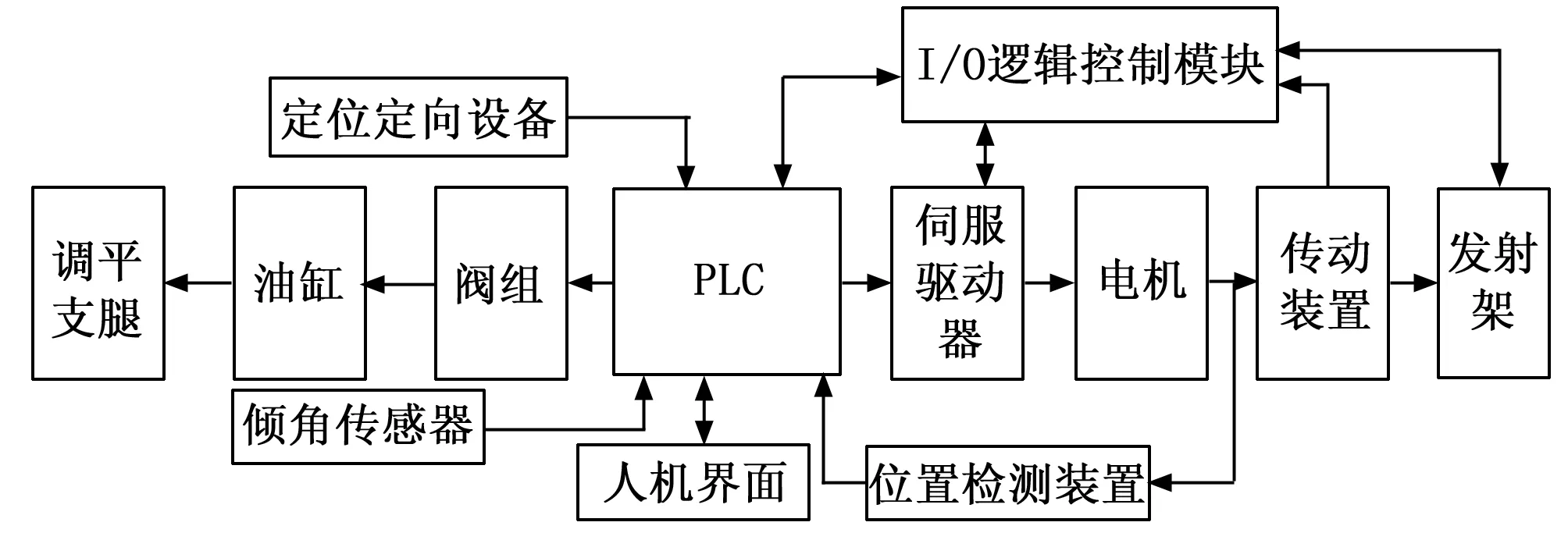
图3 控制系统工作原理框图
平台工作流程具体如下:外部油机或UPS等供电设备加电,系统上电自检,PLC控制器上电自检建立CAN网络和RS422接口连接,把自检结果显示并回告平台信息监测设备,系统自检工作正常,输入“调平”指令,PLC模拟量模块控制阀组驱动支撑调平系统4个支腿平伸、垂顶,根据调平算法[8-9]自动支撑载车底盘调平;调平后,定位定向设备工作,并将载车方位信息发送给平台信息监测设备;根据指令,输入发射架目标“角位置”数据,PLC通过CAN口发送伺服驱动器角位置数据,驱动器接收到角位置数据后,按照规定的控制规律驱动电机拖动发射架回转和俯仰到规定的角位置后锁定。发射任务完成后,输入“回零”指令后,PLC通过CAN口发送零位置数据,驱动器接收到数据后,按照回零控制规律驱动电机拖动发射架俯仰和回转回到零位后锁定;PLC控制阀组驱动4个支腿撤收。动作完成后,把状态信息回传给平台信息监测设备。
2.2 主要硬件选型与设计
2.2.1 载车底盘选型
根据装载对象三型箱弹的尺寸、重量、发射角度等总体指标要求,对载车底盘的技术要求进行了分析,综合考虑国内汽车底盘厂家现有货架成熟产品。因此按上述要求进行筛选,如汉阳、北奔、陕汽等厂家的越野二类底盘相关系列产品均符合要求,该类底盘技术成熟、越野性能佳、场地和环境适应能力强,已大量应用于工程项目[10-12],能够满足通用发射平台的运输、贮存、发射条件要求,同时根据转场距离和部署位置,亦满足铁路、水路运输要求。该类底盘驾驶室可加装冷暖空调设备,能为成员和设备提供良好的操控环境。
充分考虑道路通过性、装备后期维护、标准件及易损件采办流程等因素,经梳理,表1列出了可供选择的国产越野载车底盘型号及主要性能参数。

表1 载车底盘主要性能参数
2.2.2 控制系统设计
控制系统包含支撑调平控制系统和发射架伺服系统两部分,其中发射架伺服系统硬件主要由PLC、伺服驱动器、伺服电机和各种检测、制动装置等组成;调平控制系统硬件主要由PLC、泵站、阀组、水平传感器等组成;软件由伺服控制模块﹑调平控制模块、监控及安全保护模块组成。调平控制系统和发射架伺服系统由PLC集中控制。控制系统方案如图4所示。
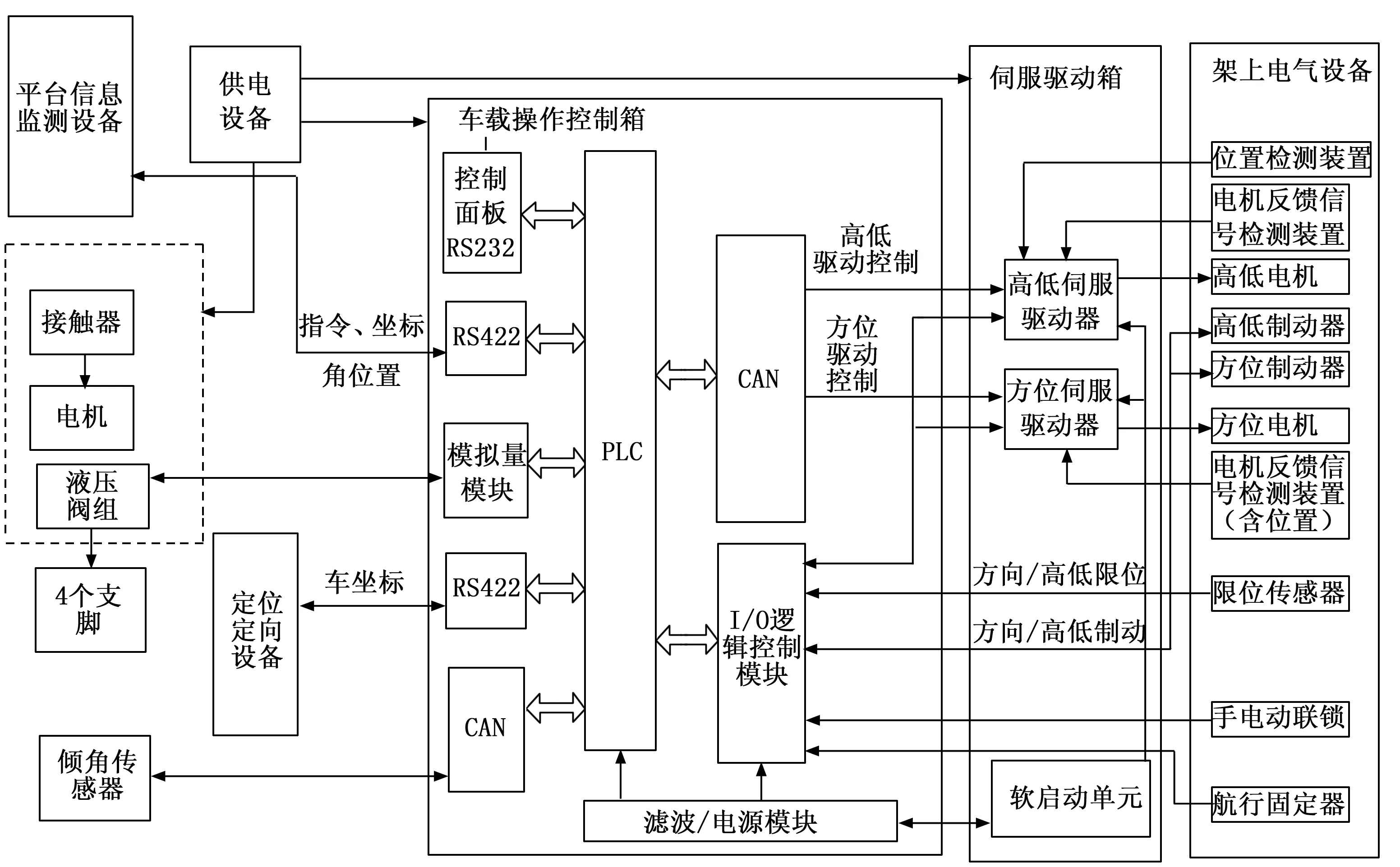
图4 控制系统方案框图
控制系统采用全数字正弦波交流伺服系统,具有控制精度高、调速范围宽、电磁兼容性好等特点,应用技术成熟。PLC控制器为100%国产产品,含主控模块、CAN通讯模块、IO模块、RS422模块、模拟量模块、显示模块等,用于接收系统指令,控制支撑调平机构的4个支腿支撑载车底盘水平并满足通用发射平台基准误差要求,控制回转俯仰装置转到指定的角度并锁定,保证任务载荷发射所需的初始发射角。PLC控制器安装在车载操作控制箱内。主要模块性能指标如表2所示。
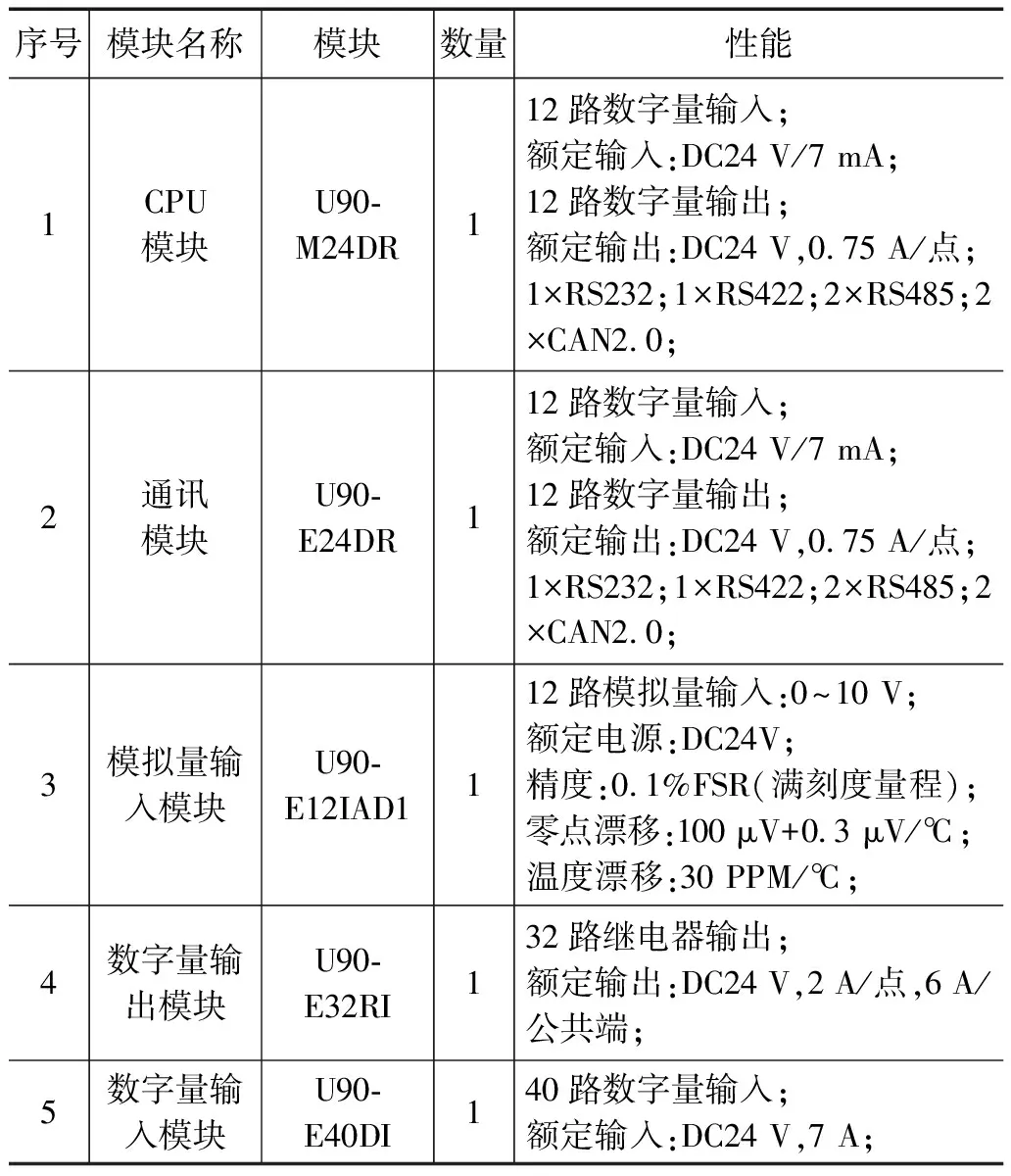
表2 主要模块性能指标
2.2.3 发射箱适配支架
发射箱适配支架框架材料采用抗弯性能良好的“工”型梁,具有采购方便、生产周期短等特点。三型发射箱适配支架与回转俯仰装置俯仰架接口统一。
发射箱适配支架上设计有姿态复核基准面,姿态复核基准面加工有“十字”菱型方位校瞄基准线,纵向刻线与发射箱适配支架纵向定位面平行,横向机加有定位垂直面与横向刻线平行,该垂直面与基准棱镜靠面安装,利用系统配套的陀螺经纬仪可标校车载发射箱的实际方位,同时使用光学象限仪放置在该平台上可复核姿态。
俯仰机构由俯仰架体、发射箱适配支架锁定机构等组成。采用钢梁焊接为长方形板式结构,发射箱适配支架锁定机构用于连接适配支架。俯仰机构上设置俯仰基准检测平台和横倾角传感器,用于俯仰基准标定和发射架横倾角实时测量和输出,并留有发控设备的安装接口。
2.2.4 辅助设备
辅助设备包括遥控发射防护装置和平台信息监测设备。遥控发射防护装置主要由防护罩、吸顶照明灯、遥控操作平台和4-M24膨胀地脚螺栓等组成。防护罩上设有膨胀地脚螺栓连接孔,用于将遥控防护装置固定至地面指定位置,也可通过压板等多种连接方式进行固定;防护装置侧壁开有电缆孔。操作人员在遥控发射防护装置内部遥控发射任务载荷,防止在发射动态过程中掉落异物砸伤操作人员。
平台信息监测设备选用一款抗恶劣环境加固型便携计算机,以辅助实现远程实时监控[13]发射平台、回转俯仰装置姿态和位置信息的功能。
3 系统软件设计
3.1 软件设计思想
系统软件分为两个部分,车载操作控制箱运行的控制系统软件和平台信息监测设备上运行的综合信息监测软件。控制系统软件主要分为上位机软件(控制系统HMI软件、副驾驶显示终端软件)和下位机软件。上位机软件主要用于显示系统状态、保留系统参数设置、系统运行报警等内容。下位机软件是整个发射平台控制系统的运算处理中心,它负责对外连接设备通讯、外部传感器信号输入和对外控制信号输出等功能。
总而言之,使自然拼读法构建适合不同年龄阶段学生的教学方法,需要教师能够充分结合教学实际情况,通过研究在专业素养基础上创新方式方法,最终能够帮助学生掌握英语。例如在加拿大,很多小学生在一年级时就已经开始通过自然拼读法进行学习。为此教师也应当把我规律,充分合理的利用有效教学方式。
软件设计在保证系统可靠性、安全性、稳定性的同时,依据系统特性采用主程序、子程序设计,步进流程程序等设计方式,使其程序功能区分清晰,保证系统的控制功能、数据运算功能、通讯功能清晰分区,有效提高程序的运行效率,可读性。
3.2 软件开发环境
开发软件运行在通用操作系统平台,采用国产化的PLC专用开发软件(Vladder6.20)和梯形图编程语言进行软件开发。梯形图编程语言支持国际标准IEC61131-3[14],支持程序加密,支持在线程序修改和调试,支持程序实时仿真,支持串口、以太网、无线网络等多种通讯方式编程,可实时监控控制系统的所有状态和变量,具有安全性高、模块化、图形化等优点。
3.3 软件流程图
软件以本地工作方式为主,根据用户实际使用环境可增加遥控功能。软件的流程分为3个阶段,其中,阶段一为系统上电自检阶段;阶段二为系统工作阶段,包含调平和伺服控制;阶段三为系统撤收阶段,包含发射架回零、调平系统撤收等。
3.3.1 系统上电自检
该阶段主要是建立整个系统的通讯,检查系统是否正常。系统上电后进行系统初始化,主要进行系统状态复位和寄存器清零,然后对设备进行安全自检,自检正常后,接收人机界面指令,若自检不正常则输出相应的故障状态。系统上电自检流程如图5所示。
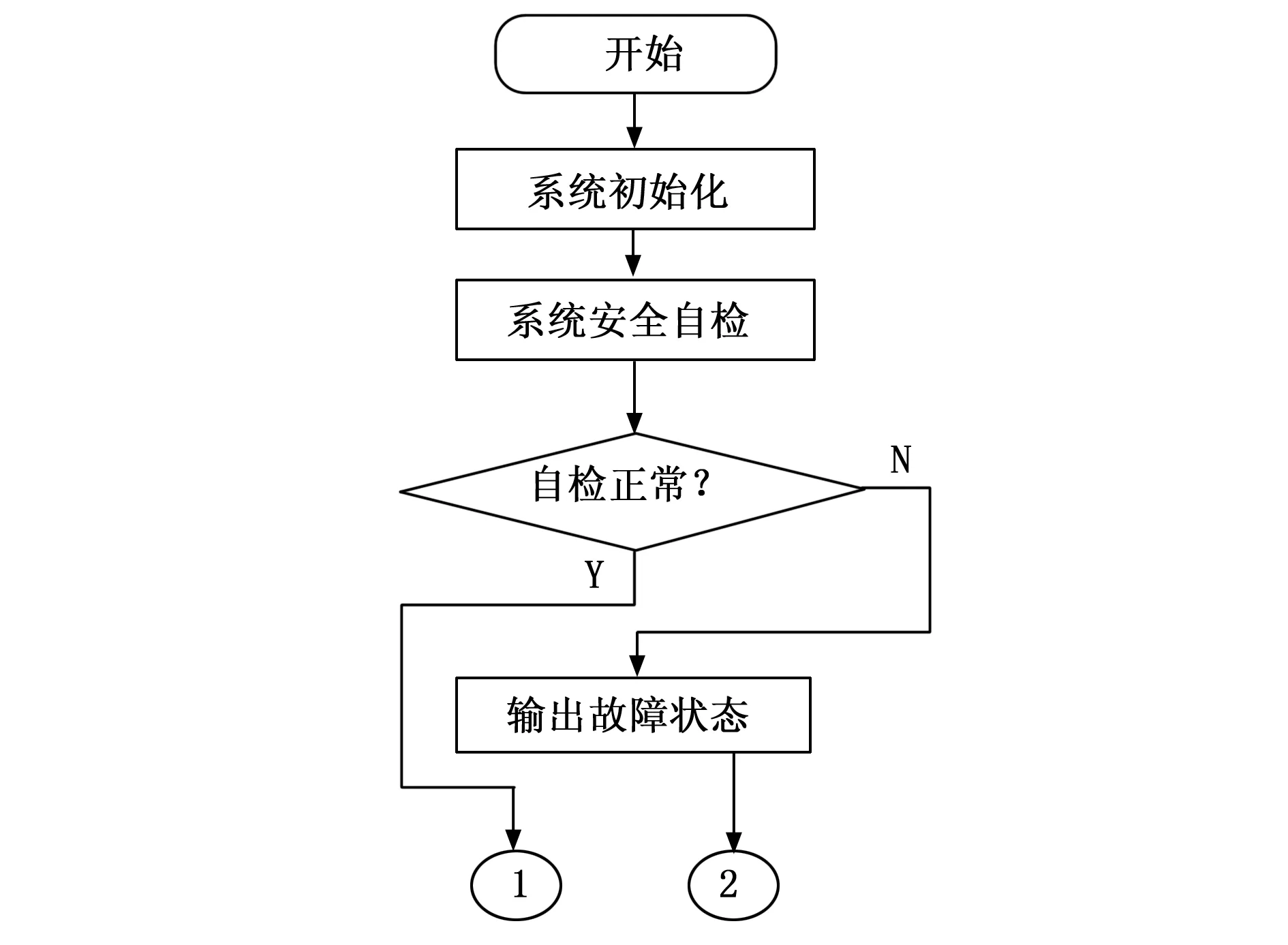
图5 系统上电自检流程图
3.3.2 系统工作阶段
该阶段主要是完成载车调平、发射架调转控制两部分操作,该两部分为互斥事件。系统接收人机界面的指令,当选择调平指令时,发射架调转选项变灰,调平系统上电,液压站启动,然后进行支腿平伸,支腿平伸到位后进行支腿调平,调平完成后,系统下电,调平结束。在调平过程中,系统出现故障时,系统主动停止动作,并在人机界面报告故障状态。当选择发射架调转指令时,输入调转角度,系统控制锁定电机,对方位和俯仰的锁定机构进行解除,当解除到位后,伺服系统上电,按照先方位后俯仰的顺序进行调转,当发射架调转到位后,伺服系统下电,系统控制锁定电机,对俯仰和方位进行锁定。在系统工作过程中,出现故障时,系统停止并在人机界面报告故障状态,调平及伺服控制流程如图6所示。
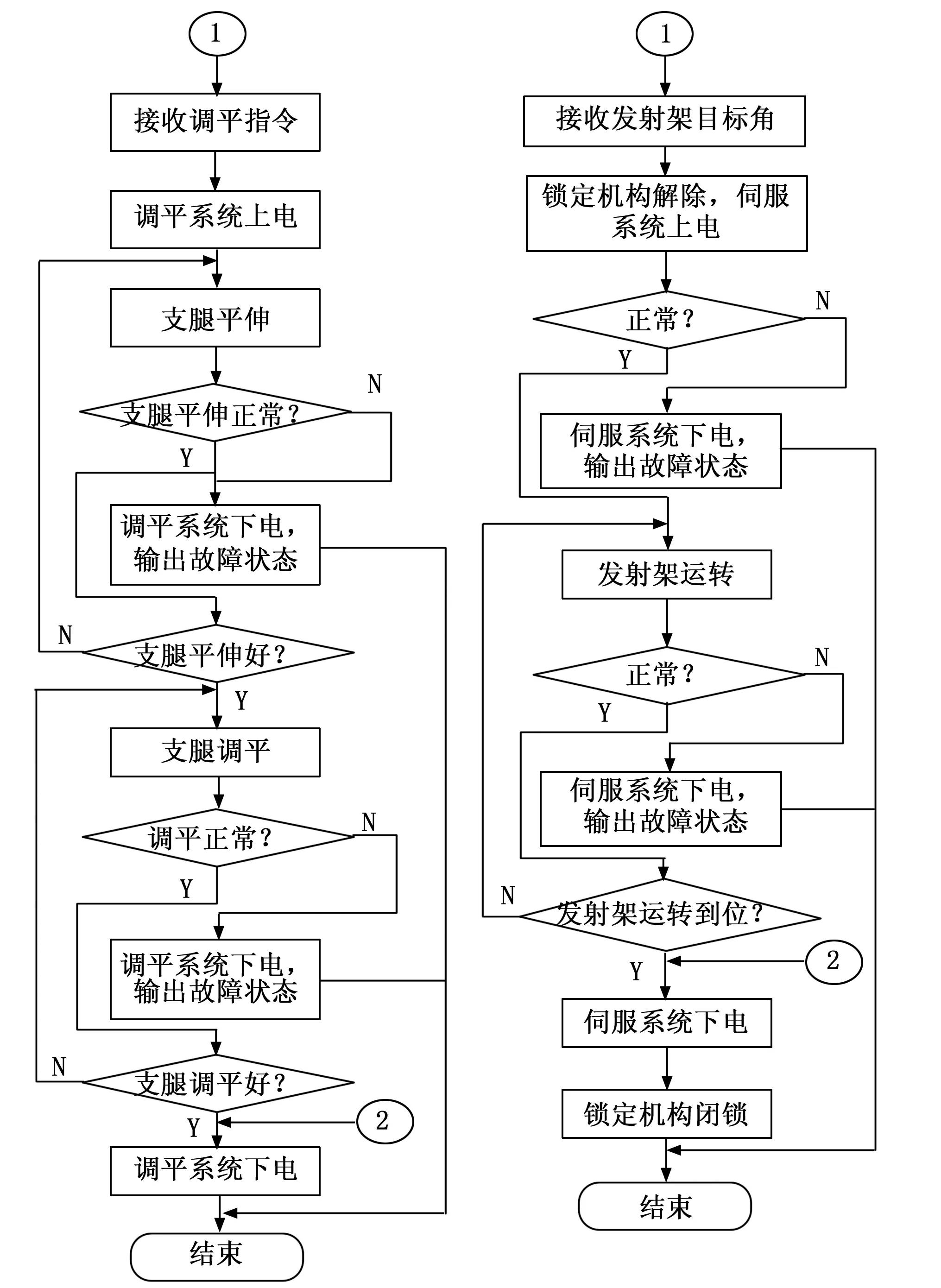
图6 调平及伺服控制流程图
3.3.3 系统撤收阶段
该阶段主要是完成调平支腿和发射架的撤收。当点击人机界面的“FS回零”按钮,进入发射架撤收流程。首先将锁定结构解锁,然后按照先方位后俯仰的顺序进行发射架回零,当发射架复位后,伺服系统下电、锁定机构锁紧。当点击人机界面的调平单元中的“一键撤收”按钮,系统进入调平系统撤收流程。调平系统按照先撤收支腿后撤收平伸的顺序进行撤收,当平伸撤收到位时,系统下电,调平撤收结束。撤收流程如图7所示。
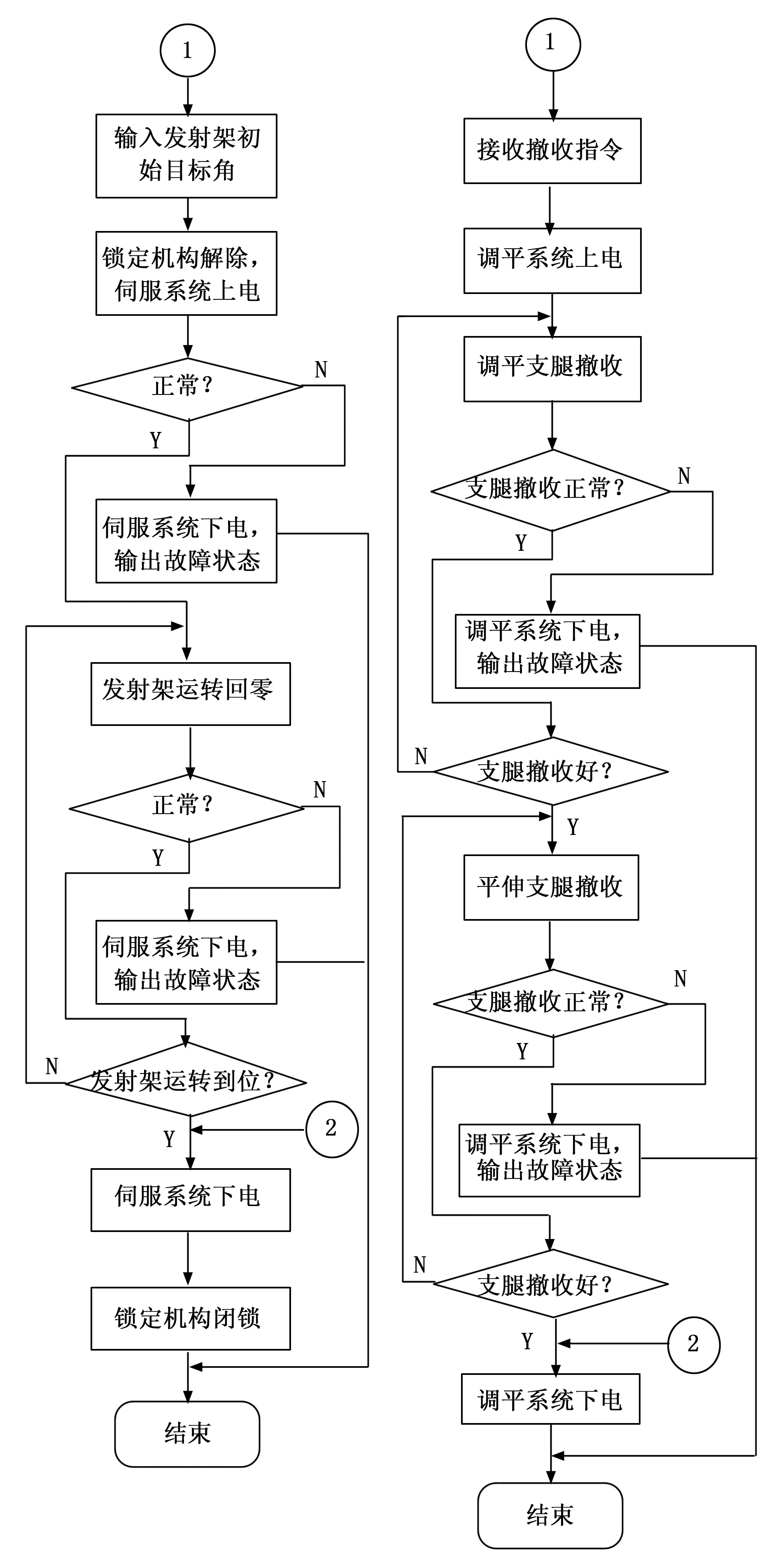
图7 撤收流程图
3.4 串口通讯
控制系统与平台信息监测设备之间采用RS422串口通讯,通过梯形图网络63执行,通讯协议为标准的Modbus RTU协议[15],串口通讯配置梯形图如图8所示。
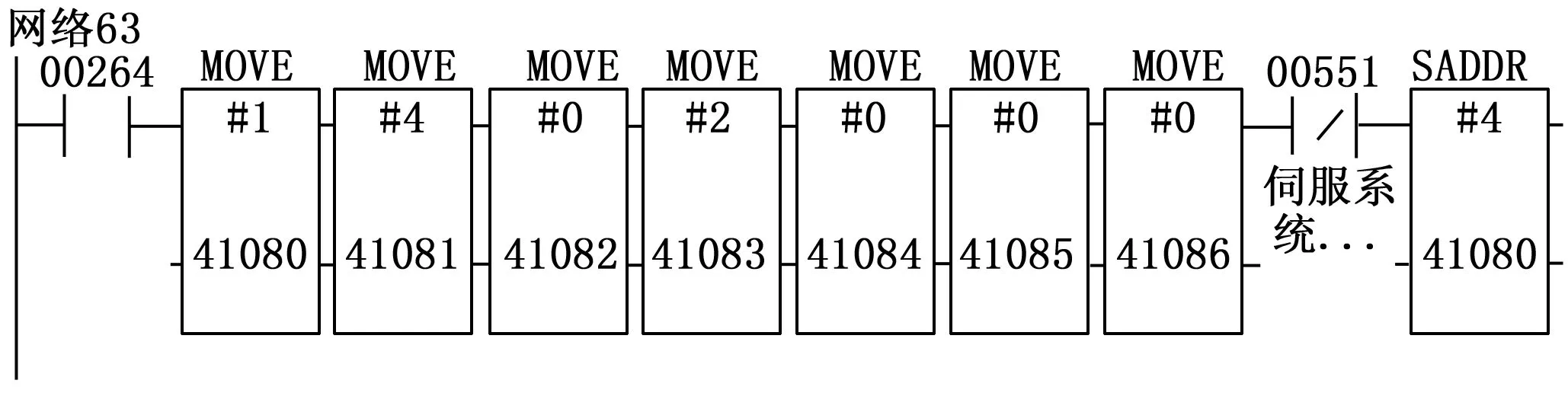
图8 串口通讯配置梯形图
3.5 平台信息监测软件
平台信息监测软件具有对发射平台上的传感器状态信息、设备与通信状态信息、支撑调平信息、卫星定位定向信息、惯性寻北信息、发射架指向信息和系统状态信息进行远程监测的功能。该软件运行在通用的操作系统上,采用组态软件[16-17]易控天地[18-19](INSPEC TNT)自动化监控及信息管理平台开发系统开发,具有较好的人机交互操作显示界面,可将面板上的平台状态信息按接收时间进行排列存储,工作结束后操作人员可以调阅历次信息数据。
人机交互显示界面包括支撑调平、卫星定位定向、发射架及设备状态信息4个区域,其中,支撑调平显示区主要完成调平传感器X轴、Y轴的实时测量和计时信息显示;卫星定位定向显示区主要显示发射平台的位置(经度、纬度、高度)和折算后的天线方向角;发射架显示区主要显示适配支架本体的方位、俯仰、真北角等角度信息;设备状态信息主要显示外部供电电压、油箱温度、系统压力、各支腿压力及典型故障报警信息。
4 试验结果与分析
对发射平台在实际使用过程中的3种典型工况进行试验,采取人工记录的方式,以验证发射平台的调平、发射姿态调整、定向等工作性能,性能测试在同一地域室外环境下进行,查看检测结果与标称值的符合性。
4.1 工况1
将发射平台停放于坡度大于±2°的斜坡上,分时执行调平操作。分别统计调平能力、调平误差、调平时间等检查项目,如表3所示,检测结果均在标准值内。
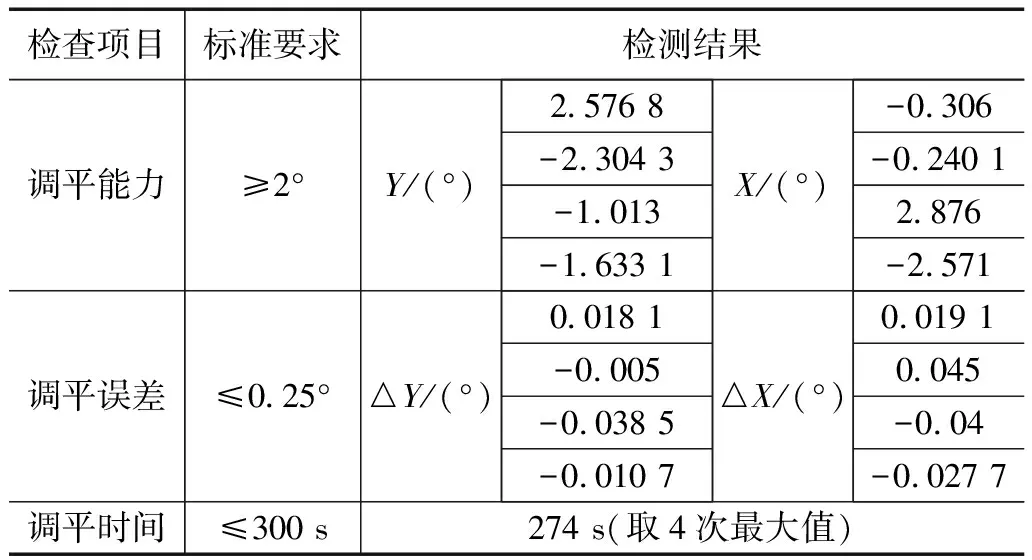
表3 调平检测结果
4.2 工况2
发射平台调平后,分别通过市电/油机对平台供电。执行发射架回转、俯仰控制操作。分别统计回转俯仰装置反应时间、范围与精度、控制方式及供电适应性等检查项目,如表4所示,检测结果均在标称值范围内。
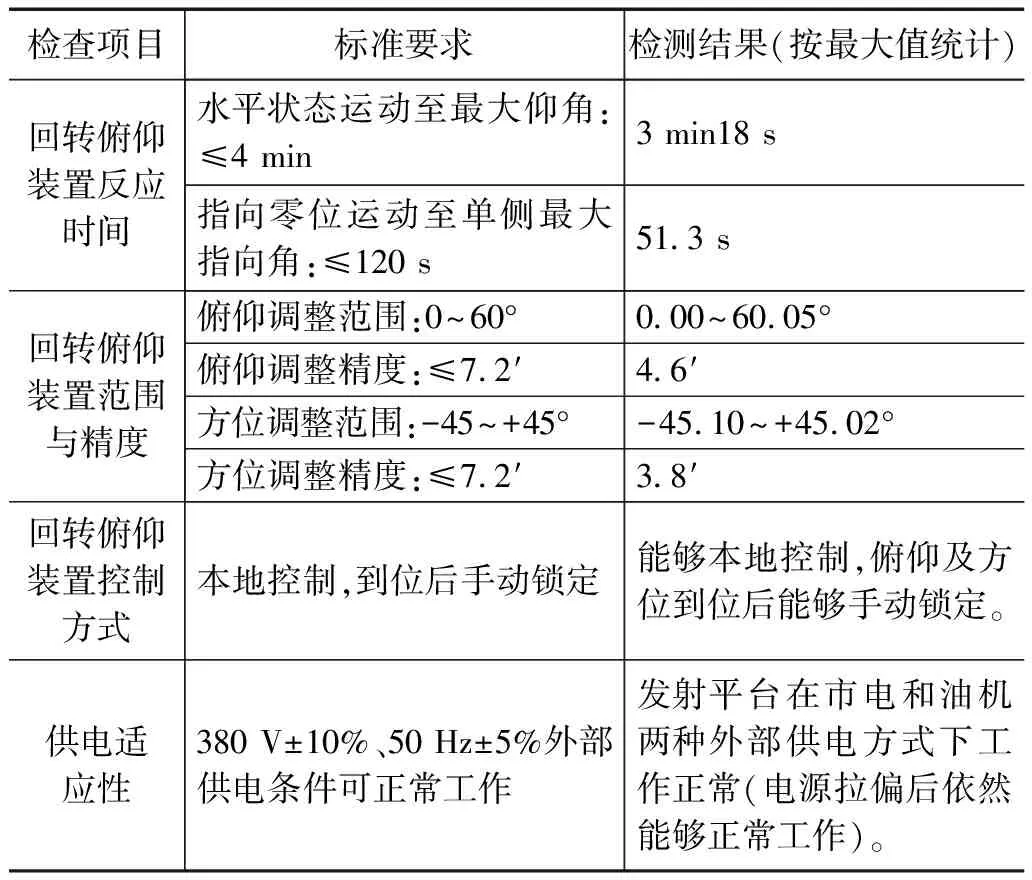
表4 回转俯仰装置检测结果
4.3 工况3
将陀螺经纬仪置于室外已知标校点处,对两个已知方位标进行定向作业,重复3次试验,取误差最大值。如表5所示,定向时间和定向精度均满足指标要求。

表5 陀螺经纬仪检测结果
为进一步全面验证发射平台的使用性能,对操作流程及步骤进行了多次演练,确保操作人员的熟练度得到考核要求。由于自然故障在检测过程并未出现,因此通过人为制造的故障进行,这种故障注入方式也是目前国内外普遍采用的测试性试验手段,评估方法和流程也比较成熟[20]。因此制定了用户级维修故障样本库,现场随机抽取故障样本,最大程度地模拟发射平台在恶劣环境工作时所面临的实际工况。最终试验结果表明:该系统工作稳定可靠,调平精度小于3′,组合定向和姿态调整精度均可控制在6′以内,发射准备时间缩短40%,系统故障可定位至模块级,各分系统兼容性好,可靠性高。
5 结束语
空中靶标及地面支持系统的通用化一体化保障是装备体系化发展的客观要求。本文采用一体化设计方法和可编程逻辑控制器(PLC)开放式标准模块化架构研制了一套机动式通用发射平台。发射平台投入使用后,完成了调平、定向、发射姿态调整、运输、储运、发控对接等一系列试验,并成功保障了3型任务载荷的10余次技术准备及发控对接任务。实现了多型弹种适配功能,有效降低了研制成本,节约了保障资源,大大提升了地面支持系统的供靶保障能力。
猜你喜欢
汽车实用技术(2022年6期)2022-04-02 06:25:48
今日自动化(2021年6期)2021-09-03 18:27:17
中国民间疗法(2021年5期)2021-06-09 09:21:08
装备维修技术(2020年17期)2020-12-28 09:40:27
机械工程与自动化(2020年4期)2020-08-25 02:06:58
国防科技工业(2020年1期)2020-01-16 07:03:28
装备制造技术(2018年6期)2018-08-04 07:19:34
森林工程(2018年4期)2018-08-04 03:23:38
军营文化天地(2017年7期)2017-09-25 07:43:44
航天工业管理(2017年4期)2017-05-12 01:16:35
