
知识辅助的无人机目标恒虚警率检测方法
2022-10-26 04:29晋良念
桂林电子科技大学学报 2022年3期
王 峰, 晋良念,2
(1.桂林电子科技大学 信息与通信学院,广西 桂林 541004;2.桂林电子科技大学 广西无线宽带通信与信号处理重点实验室,广西 桂林 541004)
近年来,无人机产业蓬勃发展,在农业、生活方面给人们带来方便的同时,也带来了一系列威胁。因无人机具有飞行高度低、速度慢、体积小等特点,导致对其检测存在巨大困难[1-3]。而且,无人机通常工作在复杂环境中,存在较强的地物杂波干扰,因此提高对“低、小、慢”目标的检测性能是当前要解决的一个关键问题[4-7]。为了降低杂波环境影响,提高雷达对无人机目标的检测性能,常采用恒虚警率(CFAR)检测算法。
传统的CFAR算法通过估计杂波背景功率水平来计算检测门限。例如,单元平均恒虚警率(CA-CFAR)是取临近待检测单元两侧单元的杂波功率均值来确定目标检测门限,类似的还有单元平均选大恒虚警率 (GO-CFAR)、单元平均选小恒虚警率(SO-CFAR)和有序统计恒虚警率(OS-CFAR)等[8-10]。
由于上述传统CFAR检测方法中环境类型较单一,无法适用于复杂环境。文献[11]提出了一种基于深度学习技术的CFAR目标检测方法,该方法证明了在不同信噪比下,DL-CFAR的性能优于传统的CFAR算法。文献[12]针对雷达探测系统,提出了一种改进的SOCA-CFAR算法,通过降低目标功率对平均噪声估计的灵敏度,来减轻多目标和大目标对检测算法的掩蔽效应。文献[13]利用地形覆盖相关信息(GIS)来辅助参考单元的选择,进而改善CFAR的检测性能。文献[14]提出一种参数化、结构化的雷达知识库模型,其中包含探测区域内的多种杂波环境信息,利用雷达知识库中的杂波分区知识来辅助选取参考单元。上述方法在一定程度上提高了目标检测性能,但并未针对无人机工作环境进行分析,故不能满足无人机检测需求。
鉴于此,通过分析不同杂波背景下的CFAR检测性能,选择检测效果最好的方法建立CFAR知识库,再针对不同的杂波分布,选择知识库中对应的最优检测方法,从而实现对无人机目标的有效检测。与前述方法相比,该方法有效解决了传统CFAR检测方法中环境类型单一的问题,可适用于不同杂波环境下的无人机目标检测。
1 建立CFAR知识库
因为均值类CFAR检测算法通过对参考窗内采样数据取平均来估计背景功率,能够满足不同杂波环境下的目标检测,所以选用均值类CFAR检测算法建立CFAR知识库。知识库中的检测方法主要包括CA-CFAR、SO-CFAR和GO-CFAR[15]。均值类CFAR检测框图如图1所示。

图1 均值类CFAR的检测框图
CA-CFAR是均值类CFAR中最经典的方法,该检测方法假定背景环境均匀且各参考单元之间独立同分布。待检测单元附近存在保护单元,可避免因目标占据多个距离单元而对杂波功率估计造成影响。CA-CFAR杂波背景功率估计为
(1)
其中:n为左右窗参考单元的长度;xi、yi分别为左右窗的参考单元。CA-CFAR检测器在均匀瑞利杂波背景下的发现概率为
(2)
其中,λ为目标信号与噪声平均功率的比值。由于门限S=TZ是一个随机变量,虚警概率为
(3)
门限因子为
(4)
GO-CFAR作为CA-CFAR的一种改进方法,主要针对强杂波区域目标的检测问题,其基本思路是取前后参考窗均值X、Y中较大者作为背景功率的估计值。GO-CFAR的杂波功率估计为
Z=max(X,Y),
(5)
GO-CFAR的虚警概率为
(6)
检测概率可表示为

(7)
SO-CFAR检测器适用于杂波边缘的强杂波区域目标的检测,其杂波功率估计为
Z=min(X,Y),
(8)
SO-CFAR的虚警概率为
(9)
检测概率可表示为
(10)
从以上分析可看出,均值类CFAR的虚警概率与所设的门限因子T及参数单元个数n有关。本研究将3种CFAR检测方法应用于CFAR知识库的建立,分别用3种CFAR检测方法处理不同杂波分布下的雷达回波信号,将检测效果最好的CFAR算法作为知识库中该杂波分布下目标检测所采用的方法。
2 杂波类型估计
2.1 杂波分布类型
确定CFAR知识库中的3种CFAR检测器后,对无人机杂波环境进行分析。无人机飞行的杂波环境比较复杂,一般用于杂波的幅度分布模型包括瑞利分布、对数正态分布、韦布尔分布及K分布等[16]。
1)瑞利分布
瑞利分布常用于描述地杂波和低分辨率的雷达系统,是描述杂波分布的一种最典型的模型。瑞利分布的概率密度函数为
(11)
其中:f(x)>0,x≥0;σ为瑞利分布的尺度参数,σ>0。
2)对数正态分布
对数正态分布能更好地描述复杂的海面或地形杂波。对数正态分布的概率密度函数为
(12)
其中:μ为尺度参数;σ为形状参数。
3)韦布尔分布模型
韦布尔分布可用来描述处于瑞利分布和对数正态分布中间的模型的杂波。韦布尔分布的概率密度函数为
(13)
其中:p为形状参数;q为尺度参数。
4)K分布
K分布是另一种能很好拟合海杂波的分布模型。K分布的概率密度函数为
(14)
其中:a为尺度参数;ρ为形状参数;K(x) 为为修正函数;Γ(·) 为伽马函数。
2.2 分布模型参数估计
对于杂波数据,确定其符合哪种分布模型,需要对4种分布模型的分布参数进行估计。然而,无人机的飞行环境主要是城市和乡村,环境中主要是地杂波。针对地杂波的研究,目前主要有3种杂波模型,即瑞利分布、对数正态分布和韦布尔分布[17]。
对于杂波参数估计常采用最大似然估计和基于部分矩估计的方法,再通过拟合优度检验来确定杂波分布类型。例如:瑞利分布采用最大似然估计和部分矩估计得到参数σ;对数正态分布采用最大似然估计法和矩估计方法可得到相应的形状参数σ和尺度参数μ;韦布尔分布采用估计方法估计尺度参数q和形状参数p。通过对杂波拟合,根据杂波的概率密度函数判断杂波的分布类型[18-19]。
3 CFAR算法的选择
基于上述分析,构建基于杂波知识辅助的CFAR检测流程如图2所示。

图2 知识辅助的CFAR检测流程
对回波数据进行杂波参数估计和拟合,判断出杂波分布类型,针对不同的杂波分布类型,采用知识库中对应的CFAR检测方法,进行恒虚警率处理,判断无人机目标的有无。
不同的CFAR算法适用于不同的杂波分布情况,相同的杂波分布下,不同的CFAR检测算法也有较大差异。
4 仿真与实测数据分析
4.1 仿真数据分析
仿真基于MATLAB软件。所采用的雷达信号为线性调频连续波信号,信号中心频率f0=30 GHz,带宽B=60 MHz,周期T=512 ms,采样点数为1 024个。2架无人机目标距离探测点分别为800、600 m。3种CFAR仿真的参考窗长度N均为80,保护单元数为4,虚警概率为10-6。
零记忆非线性变换法(ZMNL)[20]是利用相关高斯随机序列通过某种或几种非线性变换得到需要的雷达杂波数据序列。
采用ZMNL生成参数已知的瑞利分布、韦布尔和对数正态分布的杂波信号与含有2个目标的调频连续波信号叠加后做CFAR处理,观察3种CFAR处理后的检测结果。
1)使用3种CFAR检测器对瑞利分布杂波下的回波信号进行CFAR检测,仿真结果如图3所示。从图3可看出,在相同的仿真参数下,瑞利分布杂波的CA-CFAR检测效果最好,能够有效检测出2个目标,同时没有虚警点。尽管GO-CFAR检测能够识别出无人机目标,但存在虚警点。而SO-CFAR在杂波环境中存在多个虚警点,性能最差。

图3 瑞利分布杂波仿真结果
2)使用3种CFAR检测器对韦布尔分布杂波下的回波信号进行CFAR检测,仿真结果如图4所示。从图4可看出,在相同的仿真参数下,韦布尔分布杂波的GO-CFAR检测性能最好,2个目标均被有效检测出。尽管SO-CFAR可以检测到目标,但存在多个虚警点目标,而CA-CFAR检测算法无法检测出目标。
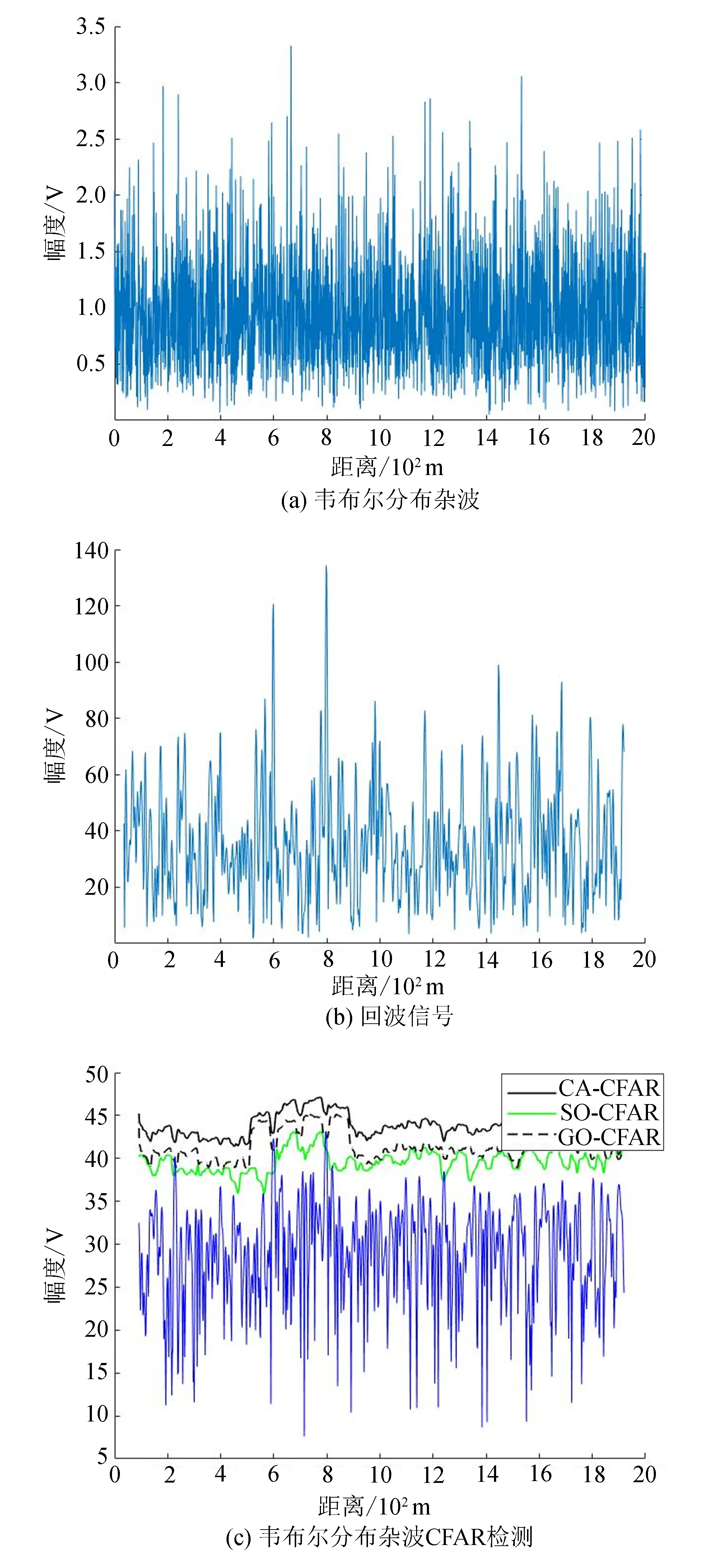
图4 韦布尔分布杂波仿真结果
3)使用3种CFAR检测器对对数正态分布杂波下的回波信号进行CFAR检测,仿真结果如图5所示。从图5可看出,在相同的仿真参数下,对数正态分布杂波的GO-CFAR能够检测出2个无人机目标,且不存在虚假目标,效果最好。尽管CA-CFAR和SO-CFAR也能检测出运动目标,但也存在多个虚警目标,不能满足检测需要。

图5 对数正态分布杂波仿真结果
综合上述仿真结果,瑞利分布杂波下检测性能最好的CFAR检测器为CA-CFAR,韦布尔分布杂波下检测性能最好的CFAR检测器为GO-CFAR,对数正态分布杂波下检测性能最好的CFAR检测器为GO-CFAR。
4.2 实测数据分析
雷达实测数据是利用三角波线性调频连续波雷达在学校周边地区进行实测获得。雷达体制为相控阵雷达,载波频率为30 GHz,波长λ=8 mm,发射信号带宽为60 MHz,周期为700 μs,采样频率为25 MHz。测试目标为大疆精灵PHANTOM4 Pro型号无人机,实验场景如图6所示。
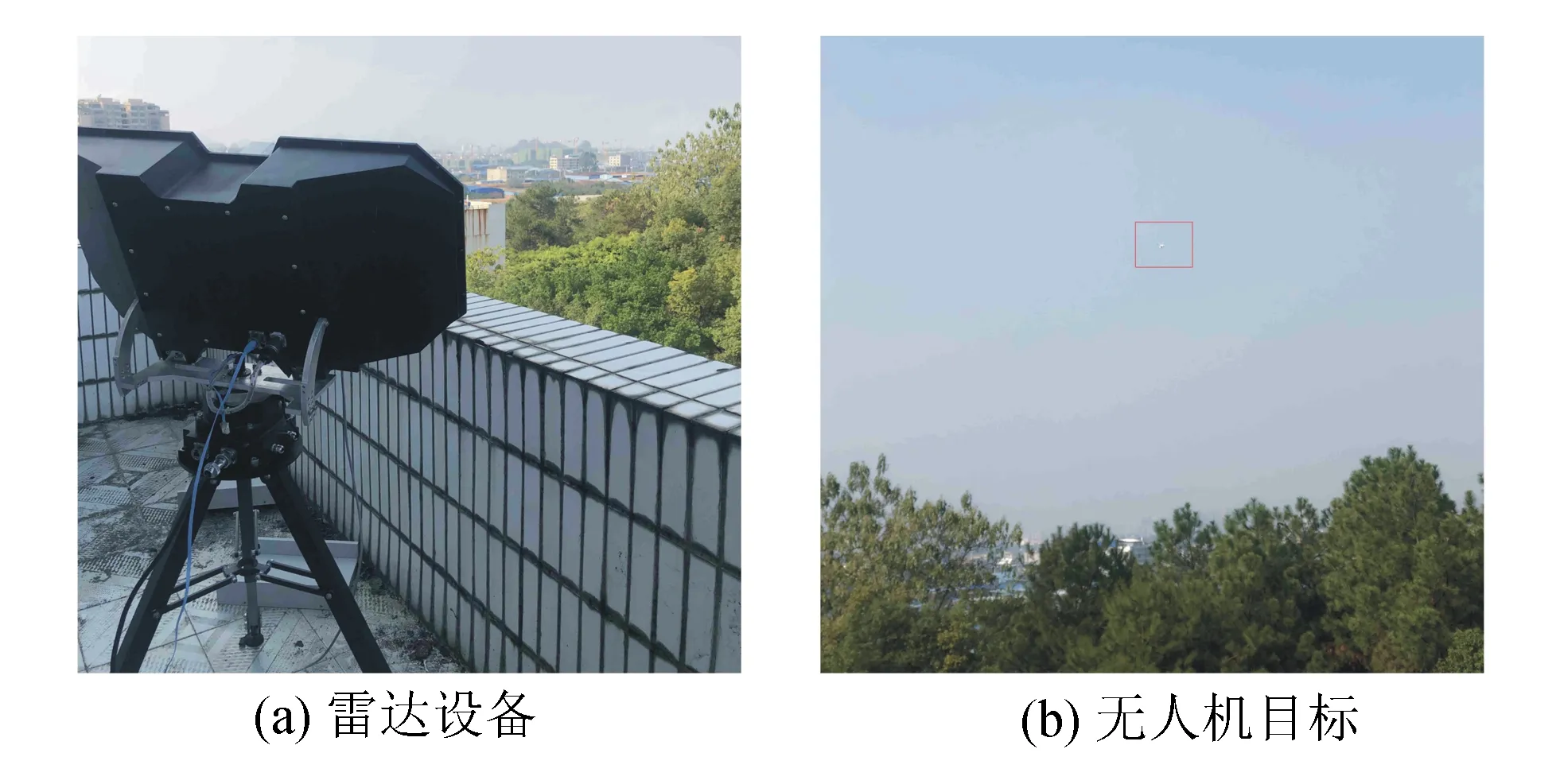
图6 实验场景
对雷达采集到的实测数据,采用知识辅助CFRA检测方法,先对瑞利分布、韦布尔分布、对数正态分布和实测数据进行拟合,判断杂波幅度类型,杂波分布拟合结果如图7所示。
从图7可看出,实测数据的杂波明显偏离对数正态分布,与瑞利分布的PDF拟合得较好。因此,实测数据的杂波类型符合瑞利分布杂波。根据建立的雷达知识库,使用雷达知识库中瑞利分布杂波所对应的CFAR检测器(CA-CFAR)进行处理,检测结果如图8所示。
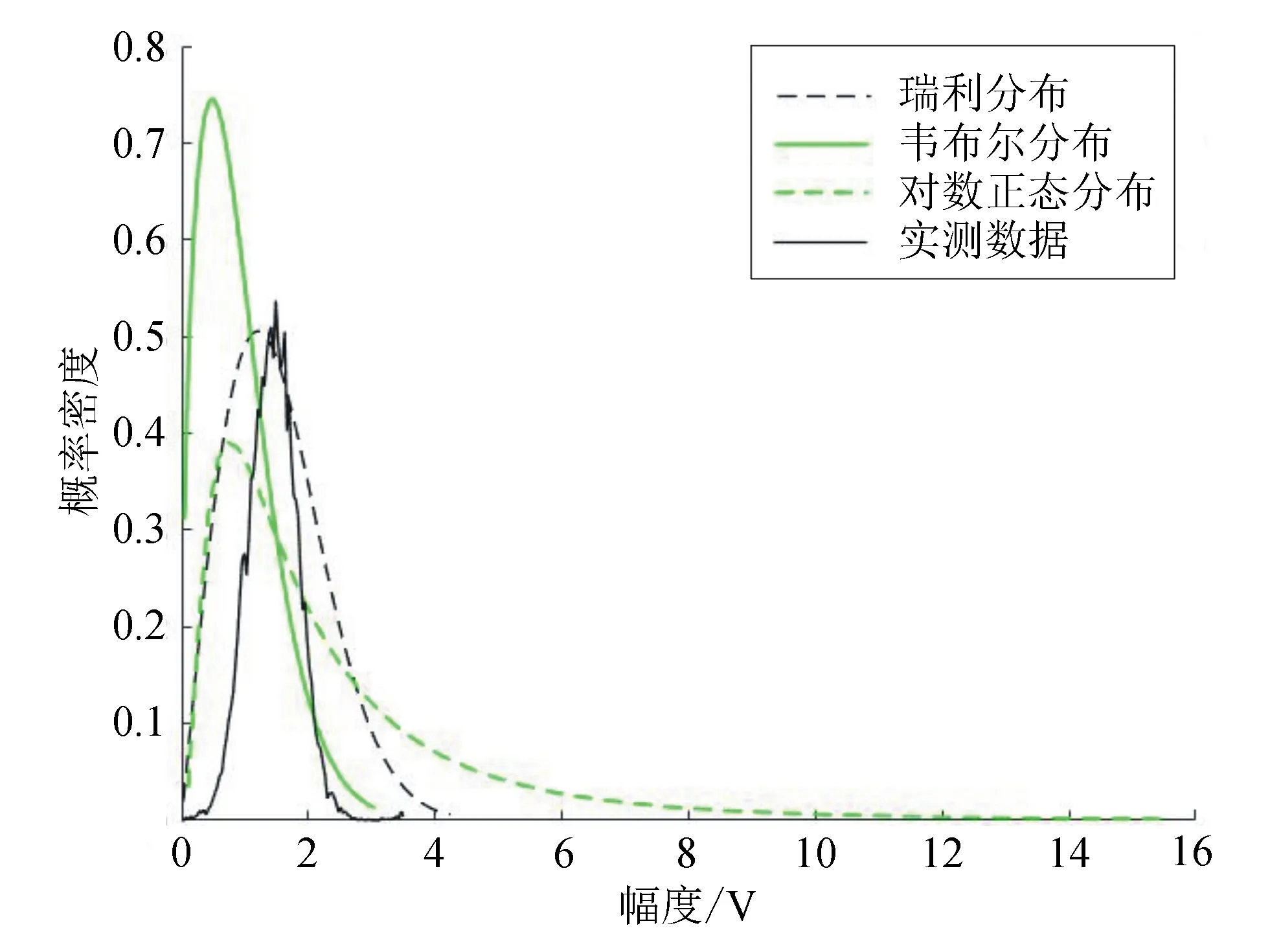
图7 杂波分布拟合
从图8可看出,在距离188 m处发现目标,且不存在虚警目标,与实际情况相符,能够检测出无人机目标,验证了算法的可行性。

图8 实验结果
5 结束语
针对无人机目标检测问题,提出了一种知识辅助CFAR检测方法。相对于传统CFAR检测方法,根据对无人机所处飞行的杂波环境,建立CFAR知识库,通过对当前无人机飞行杂波环境拟合,判断杂波分布情况,再从知识库中优选CFAR检测算法,提高无人机目标在杂波环境下的检测性能。在今后的工作中,将继续增加知识库的辅助信息,以提高对无人机目标的有效检测。
猜你喜欢
语数外学习·高中版中旬(2021年12期)2021-03-09
语数外学习·高中版上旬(2020年8期)2020-09-10
科技资讯(2020年14期)2020-06-27
速读·中旬(2017年8期)2017-09-04
新高考·高一数学(2016年10期)2017-07-06
数学教学通讯·初中版(2014年2期)2014-03-21
——基于与QuestionPoint的对比
新世纪图书馆(2014年11期)2014-02-23
科学导报·学术论坛(2013年5期)2013-06-26
读写算·高年级(2009年3期)2009-11-16
中学生数理化·高考版(2008年2期)2008-11-01
