
基于修正层次分析法的多阶段PMU最优配置
2022-10-25 02:16席禹于力蒋文辉陈波周波梁博张家兴
广东电力 2022年9期
席禹,于力,蒋文辉,陈波,周波,梁博,张家兴
(南方电网数字电网研究院有限公司,广东 广州 510700)
当前的电网已经形成高度互联、规模庞大的系统,若其中某一部分受到干扰,可能会对整个系统稳定运行造成影响[1-2]。电力系统的可观测性是进行状态估计的必要条件,也是广域监测保护与控制系统有效实施的前提。作为广域测量系统(wide area measurement system,WAMS)的重要组成部分,相量测量单元(phase measurement unit,PMU)能够测量节点上的电压相量,根据自身容量测量节点有限数量的分支电流相量,并基于全球定位系统(global positioning system,GPS)的参考时钟提供同步电压相量、电流相量、频率及其变化率等。
从PMU接收到的实时测量数据能够用于不同的电力系统应用,如状态估计、暂态和动态稳定性分析、电压稳定性监测[3-6]。但PMU安装成本较高,目前仅能选择部分节点进行PMU配置,因此需要对配电网的PMU配置进行优化,最大程度地减少PMU的数量并保持配电网的完全可观性。文献[7]总结了最优PMU配置(optimal PMU placement,OPP)模型求解的主要方法及其优缺点,如整数线性规划、模拟退火法、遗传算法等。文献[8]提出一种改进的图论法,根据网络形成最优生成树,并基于生成树选择PMU的最优位置,实现网络的完全可观。文献[9]结合零注入节点的特性,提出基于整数规划算法的PMU优化配置算法,以更少数量的PMU实现整个网络可观。
在电力系统网络中,需要制订分阶段的PMU配置计划。文献[10]提出基于分阶段的PMU配置的模拟退火公式,比单阶段配置需要更多的PMU。文献[11]提出了新的PMU布局方案,保证了网络关键节点的监控和保护,以及网络的完全可观测性。然而,文献[10-11]没有考虑通道限制和关键节点供电能力对多级PMU布置的影响。
针对上述研究的不足,考虑到配电网系统中发生线路或PMU“N-1”故障时仍需要保持系统完全可观测,本文采用修正层次分析法(revised analytical hierarchy process,RAHP),提出一种基于电压稳定性监测的多阶段PMU配置方法。首先确定配电网完全可观测所需的最小PMU数量,然后根据快速电压稳定指数(fast voltage stability index,FVSI)识别关键母线。为了在配置PMU的第1阶段就监测到关键母线,本文采用RAHP来分阶段配置PMU,并在决策过程中引入关键母线可观测性指标(critical load bus observability criteria,CLOC)来确定关键母线的最大优先级。
1 PMU配置
配电网中存在大量负荷节点,当所有节点都能被至少1个PMU直接或间接观测到时,则配电网完全可观。
1.1 PMU配置规则
PMU配置规则见表1,下面结合图1所示的不同节点连接方式进行说明。
以图1(a)为例:若节点1配置了PMU,根据规则1,该节点的电压相量及所有出线电流相量可由PMU测量得到;支路1-2、1-3的支路电流及节点1的电压相量均能被测得,根据规则2可计算出节点2、3的电压相量;若节点2、3电压已知,根据规则3可计算出节点2、3之间的支路电流。
实际配电网中会存在部分零注入节点,零注入节点的所有出线电流之和为0,是另一个可能减少PMU数量以实现完全可观性的因素。该节点存在的情况下,可以根据表1中的规则4—规则6来评估网络的可观测性。以图1(b)为例,其中节点i是与节点{1,2,3,4}相连的零注入节点:假设节点{i,2,3,4}为可观测节点,节点1不可观测,根据规则4可以计算出支路i-1的电流;假设节点{1,2,3,4}为可观测节点,零注入节点i不可观测,根据规则5可以计算出节点i的电压相量。以图1(c)为例,所有节点都与零注入节点{i,j}相连,根据规则6可以计算节点{i,j}的电压相量。

表1 PMU配置规则
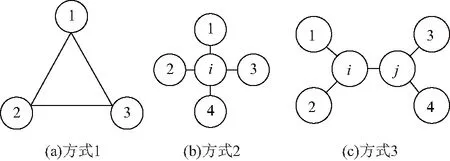
图1 PMU配置说明
上述规则能使零注入节点的相邻节点被识别为可观测节点,因此不需要为其配置PMU,从而减少网络中PMU的数量。
1.2 计及“N-1”故障下系统可观测的PMU配置
在实际运行中,配电网总会有发生故障的可能性。进行PMU配置时,需要确保配电网的某条线路或某个PMU发生故障时配电网依然完全可观。
a)线路“N-1”故障。若某线路发生“N-1”故障,要使配电网依然完全可观,可观测的节点i需要满足以下条件之一:①节点i配置了PMU;②节点i的相邻节点中至少有2个节点配置了PMU。
b)PMU装置“N-1”故障。假设PMU节点仅配置1个PMU,若某个PMU发生故障时,仍需保持系统完全可观,可观测的节点i需要满足以下条件之一:①节点i配置了PMU,并且其相邻节点中至少有1个节点配置了PMU;②节点i未配置PMU,其相邻节点中至少有2个节点配置了PMU。
综上,本文提出的PMU配置方法将使每个节点被至少2个PMU观测到,即使发生PMU装置或线路“N-1”故障,系统依然完全可观。
1.3 最优PMU配置公式
OPP是求解在电力系统中放置最小PMU集,以实现全网络可观测性,目标函数为
(1)
约束条件为
Ax≥b.
(2)
(3)

2 关键母线识别
为了确定配电网系统的最大负载能力,采用FVSI进行电压稳定分析。
2.1 线路FVSI
对于典型线路,FVSI计算公式为
(4)

2.2 识别关键母线的步骤
步骤1:使用牛顿迭代法运行基本情况下的潮流程序。
步骤2:计算基本情况下系统每条线路的FVSI值。
步骤3:在选定的负载母线上逐步增加无功负载0.01(标幺值),保持其他母线负载不变,直到潮流解不能收敛,发散前的负载是该母线的临界负载。
步骤4:计算每个母线在临界负载条件下的FVSI值。
步骤5:在每个母线中提取最大可计算FVSI的最大无功负载,最大无功负载是指相应母线的最大负载能力。
步骤6:将步骤5中获得的最大负载能力按升序排序,排名越高表示母线的最大负载能力越低。
3 多阶段PMU安装
RAHP是PMU安装阶段的第2步,即确定最佳PMU位置后进行RAHP。而在中间阶段,配电网系统只能部分可观测,这段时间内PMU的配置应最大限度增加系统中的可观测母线和关键参数数量,从而获得最大的效益。在决策过程中,负载母线可观测性指标(load bus observability criterion,LBOC)等性能指标非常重要[14-15]。
3.1 负载母线可观测性指标
根据关键母线识别方案,将给定系统中的负载母线分为关键母线和非关键母线。
关键母线负载可观测性指标(critical load bus observability criterion,CLOC)的表达式为
(5)

非关键母线负载可观测性指标(noncritical load bus observability criterion,NLOC)的表达式为
(6)

图3为7节点系统的单线图,取Nc1、Nc2、Nc3分别为与母线K相邻的关键母线、关键母线的相邻母线、相邻母线的相邻母线的集合;按照关键母线的识别步骤,选取图3中的关键母线集合Nc1为{3,7},则Nc2、Nc3分别为、{2,4,6}、{1,5},PMU母线集合为{1,2,4,5}。连接母线1、2、4、5的母线集合分别为{2}、{1,3,7}、{3,5,6,7}、{4,6},PMU母线的CLOC为:
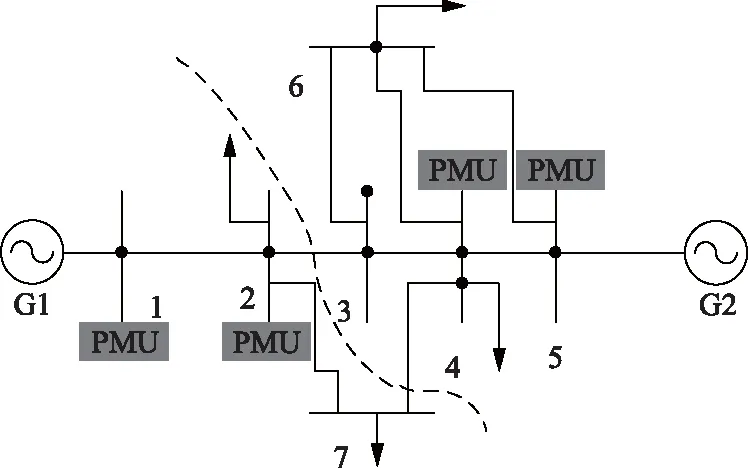
图3 7节点系统的单线图
取Nn1、Nn2、Nn3分别为与母线K相邻的非关键母线、非关键母线的相邻母线、相邻母线的相邻母线的集合,Nn1、Nn2、Nn3分别为{2,4,6}、{1,3,5,7}、空集,PMU母线的NLOC为:
3.2 发电机可观测性指标
为了实现更紧密、实时的控制,需要对发电机母线进行观测,因此发电机母线的权重更高。PMU发电机可观测性指标(generator observability criterion,GOC)表达式为
(7)

取Ng1、Ng2、Ng3分别为与PMU母线K相邻的发电机母线、发电机母线的相邻母线、相邻母线的相邻母线的集合,Ng1、Ng2、Ng3分别为{1,5}、{2,4,6}、{3,7},PMU母线的GOC为:
3.3 PMU分配指标
安装PMU时,应使其尽量稀疏地分布在电网中。母线i和j之间的电气距离
eij=eji=-lg(αijαji),
(8)
(9)

PMU母线K的PMU分配指标(PMU distribution criterion,PDC)值
(10)
式中m∈NP,NP为配置了PMU的母线集合。
3.4 联络线可观测性指标


3.5 母线可观测性指标
PMU母线可观测性指标(bus observability criterion,BOC)等于与其相连的母线总数,PMU母线K的BOC值
(11)
式中BKj为0-1变量,如果PMU母线K直接与母线j相邻则BKj=1,否则BKj=0。
4 RAHP
RAHP是一种通过两两比较进行测量的理论[17],它依赖于专家的判断得出优先级尺度,流程如图4所示。

图4 RAHP的流程
CLOC、GOC、TOC、NLOC、PDC及BOC分别为权重C1、C2、C3、C4、C5、C6,通过将权重进行两两比较形成总体偏好矩阵
其中Ci/Cj是权重的相对比较,其值为1~9,值越大表示Ci的优先级较Cj越高。
矩阵C的一致性检验如下:
CI=(λmax-n)/(n-1).
(12)
CR=CI/RI.
(13)
式中:CI为一致性指数;CR为稠度比;λmax为矩阵C的最大特征值;n为指标数量;RI为平均随机一致性指数,为经验值,n=6时RI=1.24。本文计算的CR=4.38%,远低于一致性限制(10%)。

(14)

若备选方案k可用于最优PMU配置,定义Vki为与备选方案k相关联的指标i的标准值。备选方案k的PMU配置指数(PMU install index,PMII)计算公式为
(15)


图5 7节点系统的归一化权重和PMII排名
假设7节点系统的PMU安装共分2个阶段进行,每个阶段配置2个PMU。阶段1将PMU放置在母线4、2上,使系统完全可观测。阶段2将PMU放置在母线5、1上,使得系统的每条母线都能被2个PMU观测,并且线路中断和PMU故障不会影响网络的完全可观测性。
5 算例分析
5.1 最优PMU位置
采用本文提出的基于RAHP的PMU优化布置方法,以图6所示的IEEE 34节点系统为配电网模型进行仿真,结果见表2。
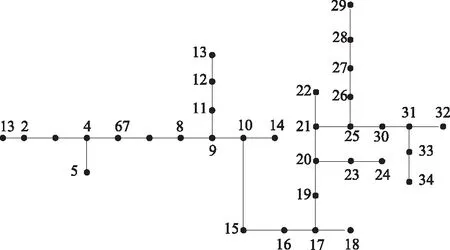
图6 IEEE 34节点系统

表2 IEEE 34节点系统完全可观测性的最佳PMU位置
5.2 多阶段PMU配置
按照2.2节的步骤进行负载母线排序,结果如图7所示。负载母线26排名为1,最大负载能力1.192 Mvar。本文将排名前4位的负载母线作为关键母线,即26、18、17、15。

图7 IEEE 34节点系统的负载母线排序
PMU配置分3个阶段进行,每个阶段有4个PMU。表3给出了IEEE 34节点系统的分阶段配置顺序:第1阶段,所有关键母线均配置PMU,以监测和控制电压稳定;第2阶段,通过配置另外4个PMU,使系统完全可观测;第3阶段,安装所有12个PMU,使母线被至少2个PMU观测。即使PMU发生故障或线路中断,也能够保持系统完全可观测。

表3 IEEE 34节点系统的多阶段PMU配置
5.3 算法结果对比
为了验证该方法的优越性,以IEEE 34节点系统为例,将本文所提的方法与其他算法进行比较,见表4。
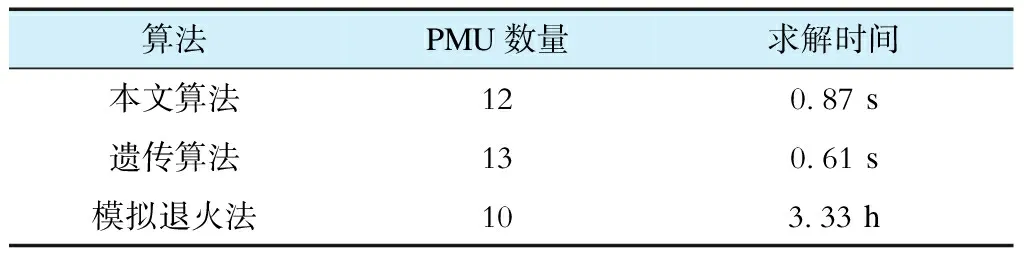
表4 不同算法结果比较
由表4可知:模拟退火法求解出的最优PMU数量虽然最少,但该算法的收敛速度极慢,求解用时过长,在电网中的实用性较低;遗传算法求解时间最短,但该算法的全局收敛能力较差,容易收敛到局部最优解;本文提出的方法在经济性和时间效益方面均有良好的效果,以较少的PMU配置数量实现系统的完全可观测,求解时间也较短。此外,与传统的一次性PMU配置法相比,本文提出的多阶段PMU配置方法充分考虑了配电网中需要重点监测的区域,具有一定的优势。
6 结束语
本文基于RAHP提出了多阶段PMU配置方法,用于监测电力网络中的电压不稳定。首先考虑配电网系统中发生支路中断或PMU故障情况,确定配电网完全可观测所需的最小PMU数量,然后利用FVSI确定关键母线,并通过RAHP对最优PMU位置进行排序,按排序结果分阶段对PMU进行配置。采用IEEE标准系统进行仿真,验证了本文方法的正确性与有效性。
猜你喜欢
智慧电力(2022年3期)2022-04-12
人大建设(2019年9期)2019-12-27
地理教育(2019年1期)2019-03-06
科学与财富(2017年22期)2017-09-10
中国化妆品(2017年12期)2017-06-27
湖南大学学报·自然科学版(2014年3期)2014-12-30
传记文学(2014年8期)2014-03-11
中国信息化·学术版(2013年5期)2013-10-09
儿童时代(2009年5期)2009-05-21
