
基于改进麻雀搜索算法的电动汽车充电站规划
2022-10-25 01:40闫丽梅罗晴川
广东电力 2022年9期
闫丽梅,罗晴川
(东北石油大学 电气信息工程学院,黑龙江 大庆 163318)
随着全球能源危机的不断加剧,各国都在积极发展新能源产业,电动汽车(electric vehicle,EV)产业成为了各国竞相研发的目标[1]。据中国汽车工业协会统计分析,2021年EV销量超过350万辆,市场占有率提升至13.4%,至2021年底,全国EV保有量达784万辆。尽管EV的销量和保有量逐年提升,但截至2021年底,车桩比(即EV数量与充电桩数量之比)高达3.46,而且缺口还在加大,充电矛盾日益突出[2]。充电站分布不合理,导致使用效率不高,往往造成部分用户“一桩难求”或者一些充电桩空置的问题,因此有必要对充电站进行合理规划。
目前,国内外关于充电设施的规划已有相关研究,但是还没有形成完整的体系,主要可以从2个方面讨论:①基于点需求的p-median模型[3]、p-center模型[4]、覆盖模型[5];②基于流量需求的截流方法[6]。文献[7]以充电服务能力最大化和网损最小化为目标定义隶属度函数,应用遗传算法进行求解;文献[8]采用差分隐私保护下的聚类算法分析真实的充电数据,以社会总成本最小为模型利用改进k-means算法求解;文献[9]利用Voronoi图,考虑交通网和配电网络的结合进行充电站的选址定容;文献[10]在规划的基础上,综合考虑了可再生能源的出力。上述研究成果不同程度地考虑了用户或投资方的利益,约束条件不够全面,充电站规划属于多目标规划问题,研究者们常采用客观赋权的熵权法[11]和主观赋权的层次分析法[12],或者利用帕累托最优前沿分析最优方案[13]。充电站选址属于非线性多峰值规划模型,大多采用传统的智能优化算法对其进行求解,如粒子群优化算法、遗传算法等存在收敛速度慢、易陷入局部最优等缺点。近年来,研究者们根据仿生学提出了一些启发式智能算法。文献[14]采用改进的鲸鱼优化算法求解选址优化模型;文献[15]兼顾运营方和用户利益,提出改进飞蛾算法求解模型;文献[16]利用萤火虫算法进行模拟。上述研究往往采用候选站址中的几个作为初始站址进行充电站规划,没有考虑对规划区的负荷预测或者只考虑了无序负荷。2020年提出的麻雀搜索算法是模拟麻雀在野外觅食,其群聚的位置可以作为充电站选址的结果,而且该算法具有参数少、收敛速度快、规避性强的优点,目前已应用于无人机航迹规划[17]、图像阈值分割[18]等领域。
综上所述,本文在考虑EV有序时空负荷预测的基础上,综合多种约束条件,建立以充电站建设和运营成本、等待时间成本、环保成本之和最小为规划目标的模型;针对目标权重难以决策的问题,引入层次分析熵权法进行决策;针对传统麻雀搜索算法易陷入局部最优的问题,引入折射反向学习进行初始化,并应用柯西变异使其跳出局部极值。利用改进的麻雀搜索算法对模型进行求解,得到规划区EV充电站的合理规划布局。
1 充电负荷时空分布预测
1.1 用户行为及影响因素
EV充电负荷具有周期性和波动性,并且与用户行为习惯、出行规律、EV类型、日期、气象等息息相关,如何对影响因素进行合理的量化和分析是对充电需求进行预测的基础。
1.1.1 充电需求判断
EV充电站主要集中在大型商场、小区、高速路口、停车场等场所。EV的起始荷电状态满足一定的概率分布函数,通过随机抽取,判断其是否低于最小阈值,当EV的电量低于最小值时采用就近原则进行充电。根据用户的心理,充电频率也会影响充电需求判断。
1.1.2 用户行为习惯
用途不同的私家车、出租车、网约车和公交车等,其出行链、日行驶里程和起始充电时刻也不同。美国交通部曾做过关于居民家庭出行调查(national household travel survey,NHTS)[19]报告,绝大多数学者都认为用户驾驶EV的习惯与燃油汽车相似。本文对出行数据进行拟合,得到用户的出行、充电特征。
日行驶里程的概率密度函数[20]
(1)
式中:x为行驶时长;L为行驶里程;μd为期望值;σd为标准差。
车辆出行起始、结束时刻[21]的概率分布函数f1、f2分别为:
(2)
(3)
式(2)、(3)中:tstart、tend分别为车辆出行起始、结束时刻;λ1=0.389、α1=7.046、β1=1.086、λ2=0.066、α2=15.610、β2=9.667均为计算系数;μt为期望值,取μt=17.6;σt为标准差,取σt=3.4。
1.1.3 充电模式
随着电池技术的不断发展,EV充电模式形成了快充、慢充、常规充电3种趋势,快充便于应急,慢充和常规充电往往用于家庭用户。EV所需的充电时间主要由电池的总容量、初始荷电状态、目标充电状态和充电功率决定。EV结束出行后的电池荷电状态[22]
(4)
式中:ksoc0为上一次充电结束时的电池荷电状态;Lmax为最大续航里程。
充电过程分为恒压、恒流2个阶段。充电时长[23]
(5)
式中:Bca为电池容量;η为充电效率;Pbc为充电功率。
1.2 交通道路模型
1.2.1 路网拓扑结构的数学描述
实际的交通道路错综复杂,利用图论方法,道路网的拓扑结构可用图G(V,F)来表示[24],其中:F为规划区域交通网中的道路,例如一级道路、二级道路;V为交通网节点,例如十字路口、T型路口,即道路之间的交点。每条道路的距离及其两端节点用距离矩阵D来表示:
(6)
(7)
式中:inf表示对应的2点不连通;lij为从节点i到节点j路段的权值,它不是单纯的道路距离,而是综合道路距离和道路阻抗(表征拥堵程度)的函数。道路阻抗[25]可表示为节点对应的阻抗Cvi和路段对应的阻抗Rvij,即:
(8)
式中:xij为道路距离;Wij为道路阻抗;S为道路拥堵状况,其值越大表明道路越拥堵;下标中的1、2表示对应不同S的Cvi、Rvij取值,具体可见文献[25]。
1.2.2 路径选择
起点-终点(origin-destination,OD)矩阵由车辆行程数据集计算得到,从OD矩阵中随机抽取EV出发地i和目的地j,OD矩阵每行的元素之和为该节点的交通总发生量,每列的元素之和为交通总吸引量,在不考虑交通拥堵的情况下,用户往往选择总距离最短的路径,可以通过Floyd最短路径算法求得[26]。Floyd算法流程如图1所示,其中:P为路径矩阵,o为起点,d为终点,P[o][d]表示从o点到d点的路径;D[o][d]表示从o点到d点的距离;np为节点数。
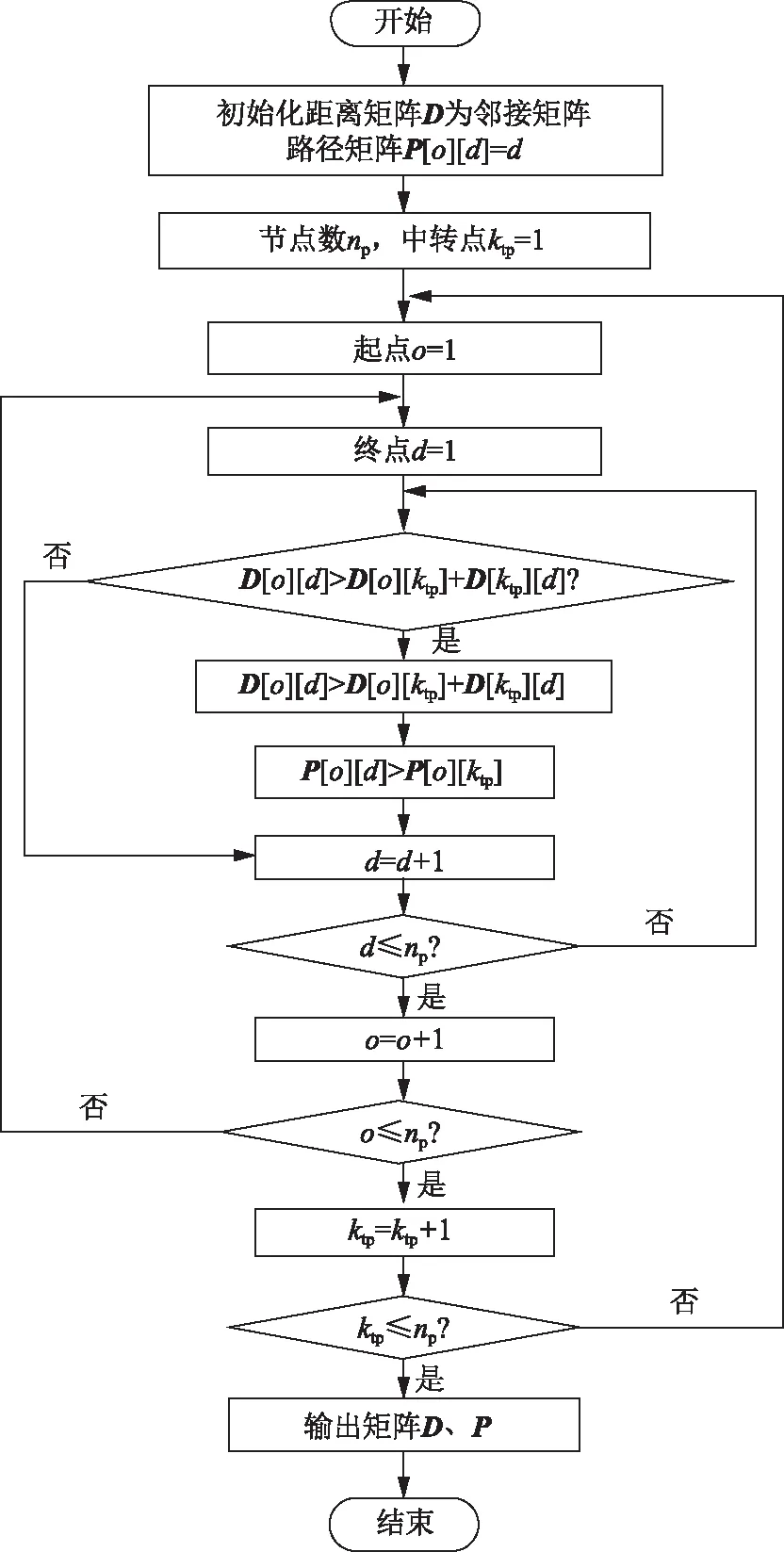
图1 Floyd算法流程
1.3 考虑时空分布的EV充电负荷预测算法
OD矩阵是交通需求预测四阶段法中的重要因素。通过各城市的车辆轨迹数据开放集,可以得到不同时段EV的数量,进而得到各时段所对应的OD矩阵[27]。
蒙特卡洛方法根据一定的概率模型,通过计算机从设置的概率分布函数中随机抽取样本进行计算,抽样次数越多,模拟出来的数值越准确[28]。用户心理的不同造成充电阈值不同,所以居民的出行往往有很大的随机性,需要对其规律进行总结。EV的出行规律与燃油车类似,故国内外研究者常常采用普通汽车出行大数据拟合概率密度函数,从而定义EV的出行规律。得到这些随机量后,通过蒙特卡洛算法先得出单台汽车的充电量,再依次增加仿真的次数,直至得到某一区域所有EV充电负荷的总量[29]。EV充电负荷预测流程如图2所示,其中:NEV为EV总数,n=1,2,…,NEV;M为仿真总次数,m=1,2,…,M。
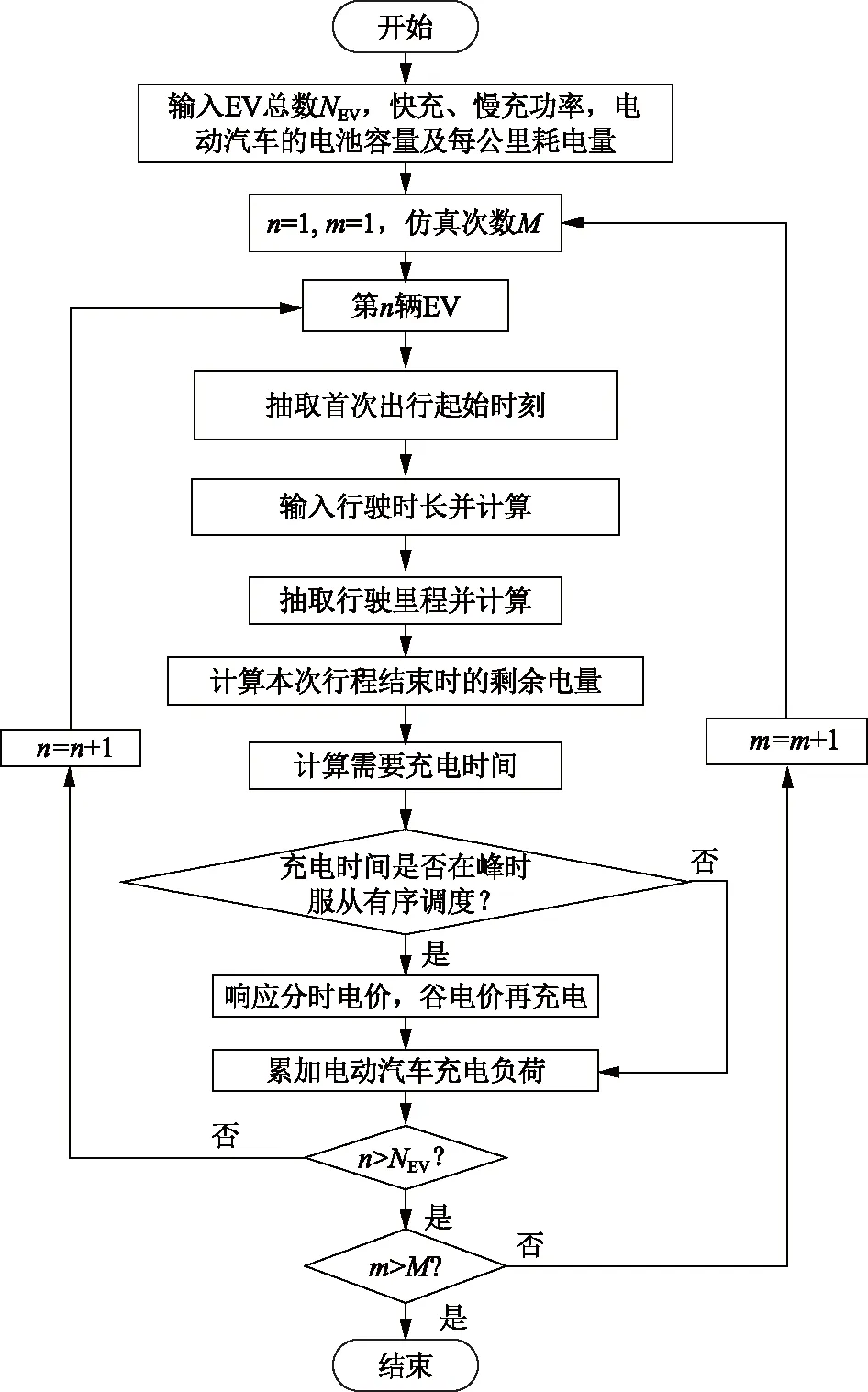
图2 EV充电负荷预测流程
为了减小峰谷差,现已实行在居民区私家车充电桩采用分时电价充电,用户可以登记注册是否采用分时电价。本文采用基于拉格朗日松弛法的分时电价充电策略,以缓解用电高峰时的紧张程度。分时电价设置见表1。

表1 分时电价
具体计算步骤如下:
a)确定规划区域的路网、节点之间的距离、邻接矩阵;设定该区域的EV总数,即仿真次数;依次对初始出行地点、起始出行时刻、结束时刻、日行驶里程、充电阈值等进行概率拟合,这里设定起始荷电状态满足正态分布N(0.5,0.1)。
b)结合用户每日出行需求(如通勤需求、购物娱乐需求等)划分出行链,考虑道路阻抗矩阵是否满足居民的出行意愿,利用Floyd最短路径算法确定单台EV的出行轨迹。每到达一个道路节点,由当前EV的电量决定是否充电,若荷电状态ksoc<0.2,则车主需寻找最近的站点进行充电,同时根据EV的充电时间,判断是否处于负荷高峰时期;反之继续上路,直至下一节点电量耗尽等待充电或者到达目的地。
c)用户回到家,结束了全天行程。此时需要检查EV已有的电量以确保次日的行程,此时的充电阈值与白天出行时并不相同。当荷电状态ksoc<0.6时,需要用户在小区停车场进行慢充直至充满;反之则作为次日的起始荷电状态。
综上所述,初始得到单台EV的充电负荷,不断扩大仿真量,根据EV所在区域的饱和程度,得到充电总量。
2 充电站规划综合成本
2.1 目标函数
EV充电站综合总成本F包括:充电站建设运行成本F1(主要有土地成本、新建充电桩成本和其他设备成本)、途中年耗时成本F2和用户年排队等待时间成本F3、环保损失成本F4[32-33]。目标函数为:
minF=αF1+β(F2+F3)nyear+ψF4,
(9)
(10)
(11)
U(Qi)=0.12C(Qi),
(12)
(13)
(14)
F4=CpPloss.
(15)
式中:fω为单位时间(日)成本;ψ为对应环保损失成本的系数;q为配电变压器和输电线路等相关设备成本的等效投资系数;e为充电桩的单价;nyear为充电站规划年限,设定为5年;α、β为权衡用户侧、运营商侧的系数,不同取值代表不同的利益侧重;N为充电站数量;r0为折现率;my为折旧年限;Qi为充电站i的充电桩数量;C(Qi)为充电站的建设投资成本函数;U(Qi)为充电站的年运行成本函数,是前期投资方建设成本的12%;JCSi为选择充电站i进行充电的充电需求点集合;E(JCSi-j)为用户从i号充电站到j号充电站进行充电的路途中经过的路径集合;φ为道路系数;dk为道路k的长度;v为车辆行驶速度;Wi,t、ni,t分别为用户到达充电站i时,消耗的等待时间和正在充电的汽车数量,下标中的t表示所处的时间段;Ploss为网损;Cp为网损折算的成本。
充电站的规划是一个多目标问题,需要权衡用户、投资方之间的利益来选择合适的权重。本文采用文献[31]的层次分析熵权法,根据专家经验和用户喜好对权重系数进行决策:
(16)
式中:ζz为指标z的权重系数;Fz为层次分析法得到的指标z的权值系数;Mz为熵权法得到的指标z的权重系数;Z为指标总数,本文取Z=3,3个指标分别为投资方经济性、用户便利性、环保性。
针对层次分析法得出的权值系数,在查找大量文献及数据基础上,构造3个指标之间两两相比的判断矩阵,见表2。根据层次分析法的原理及计算步骤,得出3个指标权重为0.461 4、0.335 4、0.203 2,且通过了一致性检验。

表2 评价指标判断矩阵
针对熵权法的权重系数,则是在充电站规划模型中将种群计算得出的充电站建设运行成本、用户时间成本和环保损失成本作为熵权法的评价指标数据,计算3个目标的熵权重。
因此将多目标问题转化成单目标问题,目标函数为:
minFit=ζ1F1+ζ2(F2+F3)nyear+ζ3F4.
(17)
式中:Fit为利用层次分析熵权法确定3个权重系数后的综合成本。
2.2 约束条件
a)充电站数量约束为
Nmin≤N≤Nmax.
(18)
式中Nmin、Nmax为充电站数量的最小值、最大值。
b)每个站点充电桩数量约束为
nchar.min≤nchar≤nchar.max.
(19)
式中nchar为单个站点的充电桩数量,nchar.min、nchar.max为其最小值、最大值。
c)为了确保充电站的服务半径,以及防止充电站之间的距离过于密集,充电站之间的距离约束为
Dmin≤D≤Dmax.
(20)
式中D为充电站的服务半径,Dmin、Dmax为其最小值、最大值。
3 改进麻雀搜索算法求解
3.1 传统麻雀搜索算法
麻雀是群居鸟类,在日常觅食过程中往往分为领头鸟和追随者。领头鸟通常是有进食经验的成年公麻雀,适应度值越高代表其种群地位越高,越能先获得食物,肩负起寻找食物的责任,领头鸟的位置更新如式(21)所示,同时麻雀也受到天敌的威胁[30-31]。
(21)

追随者的位置更新公式为:
(22)

在群体生活过程中,麻雀很机警,能及时察觉人或其他动物的靠近并快速整体撤离,这是它们对自身种族繁衍安全的一种保护机制。因此,需设置一定量的侦察者,以便及时发现天敌。侦察者的位置更新公式为:
(23)

3.2 改进麻雀搜索算法
传统的麻雀算法在寻优后期易陷入局部极值,丧失整体的多样性,导致最后的结果不准确。因此在最初的觅食阶段,为了提高麻雀种群的群体多样性,在领头鸟初始化过程中引入折射反向学习机制。根据式(24)生成折射种群:
(24)

若追随者的参数设置不当,易导致整个群体陷入同一位置。为了提高全局寻优能力,使追随者跳出局部极值,引入柯西变异策略,即
(25)
式中cauchy(0,1)为柯西分布函数。
具体步骤如下:
a)通过折射反向学习对麻雀种群进行初始化;设置相关参数。
b)计算每只麻雀的适应度值并排序,确定当前最优、最差适应度个体。
c)对领头鸟进行位置更新。
d)引入柯西变异策略,对追随者进行位置更新。
e)对侦察者进行位置更新。
f)判断是否满足停止条件:若满足,退出循环,输出最优选址定容方案;否则,返回步骤c)。
传统麻雀搜索算法的收敛速度快,但非常容易陷入局部最优。经过改进后的麻雀搜索算法在种群初始化时引入了折射反向学习,提升了初始麻雀种群的质量,且既保持了传统麻雀搜索算法的收敛速度,又引入柯西变异策略提升了算法跳出局部极值的能力。基于改进麻雀搜索算法的充电站规划流程如图3所示。

图3 EV充电站选址定容流程
4 仿真分析
4.1 仿真设置
4.1.1 EV参数设置
首先设置单台EV的各项参数,见表3。根据规划的区域土地面积和人口因素,设置仿真的EV总数量为8 000。根据燃油车的出行数据,拟合得到EV用户的出行规律。EV的型号为BYDe6。

表3 EV参数设置
4.1.2 路网结构设置
规划区域路网拓扑如图4所示,根据邻接矩阵绘制出各个节点以及各个节点之间的距离。其中含有64个路网节点,95条道路。将这64个节点根据城市土地建设规划成工作区、居民区、商业区,以满足人们日常的生活需要。各节点所属区域见表4。

图4 规划区域路网拓扑

表4 区域划分
4.1.3 起始出行位置设置
对于不同的路网节点,每天起始出行的车辆数也不同。车辆起始出行位置分布如图5所示,起始出行时刻概率分布如图6所示。

图5 车辆起始出行位置分布
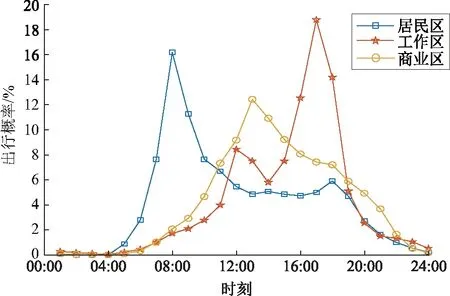
图6 起始出行时刻概率分布
4.1.4 阻抗函数
阻抗函数表征人们日常出行在2个地点之间的阻碍,函数值越小,路途越不拥堵,花费的时间越短[32]。不同地区最短行程距离对比和各区域之间阻抗函数如图7、图8所示。
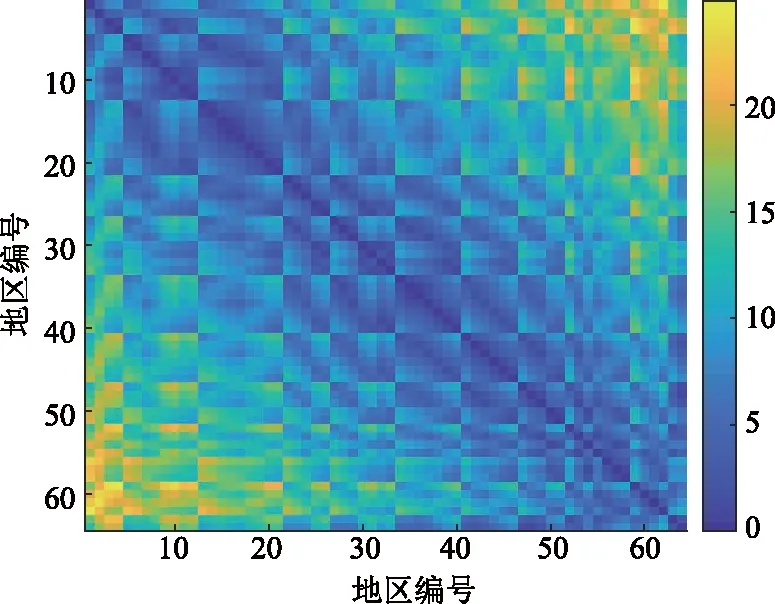
图7 不同地区最短行程距离对比
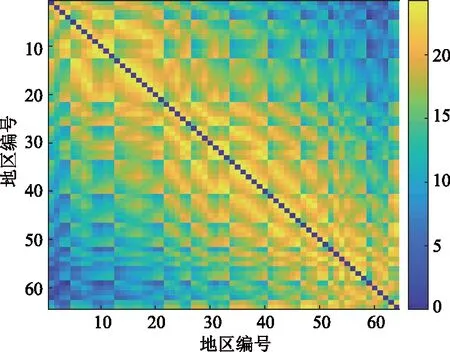
图8 各区域之间阻抗
4.2 仿真结果分析
a)根据前面所述的基于拉格朗日松弛法的分时电价充电策略,在已知某区域的基础负荷上引入电动私家车,得到无序、有序情况下的充电需求时间分布。电动私家车一日负荷如图9所示。

图9 电动私家车一日负荷
由图9可知,由于下班路上的拥堵,在无序充电情况下,用户往往在18:00—19:00开始对EV进行充电,电网此时正处于一天中的高峰负荷期,随机充电无疑更加重了电网的负担,即“峰上加峰”,加大了峰谷差;而有序充电可转移高峰负荷,同时在负荷低谷时期充分利用资源。
在分时电价的有序充电策略下,电网原负荷的峰谷差率为37.10%:无序充电后,峰谷差率升高为40.20%;有序充电后,峰谷差率降低为32.56%。这说明经过调度,可以减小无序充电带来的“峰上加峰”,并填补低谷时期负荷的空缺,实现资源利用最大化。
b)根据出行链的思想,模拟居民日常的出行需求(例如上、下班,去娱乐场所休闲等),对整片区域进行时空分布预测,得到不同时刻不同节点的充电量。
出租车的随机性最大,司机们一般采用倒班制,多数情况下进行快充,因此不采用分时电价策略;私家车出行较为规律,因此采用基于拉格朗日松弛法的分时电价策略。
有些节点的距离接近且功能相同,因此将所有节点聚类为32个节点,将1日等分为48个时段进行仿真,得到各个节点的日充电负荷,如图10、图11所示。用户在1日的行程结束后,通常回家对汽车进行慢充,因此居民区在19:00—次日06:00的充电负荷较大,以满足次日的工作需求。工作区通常在05:00—08:00负荷量较小,在08:00—12:00和12:00—17:00达到小高峰。工作结束之后,人们经常前往商业区进行购物、吃饭等休闲活动,在夜晚时期达到小高峰,工作区、商业区的小高峰时间早于居民区,私家车开始充电时间更多集中在下班高峰期,约在19:00达到高峰,且晚上充电频率显著高于中午。出租车由于白天载客,采用一日两充的方式,通常在02:00—05:00和08:00—10:00充电,由于出租车的数量较私家车多,对整个充电负荷的影响更明显。仿真结果符合实际情况,验证了方法的合理性。

图10 私家车充电需求

图11 整体充电需求
c)各功能模块的充电需求如图12所示。由于人们在商业区停留的时间不是很长,商业区的充电桩一般采用快充的形式,夜晚的负荷量占主体。居民区往往采用慢充的形式,充电跨越时间长,且居民区的区域面积大、涉及的节点数多,其充电需求量远大于工作区和商业区。
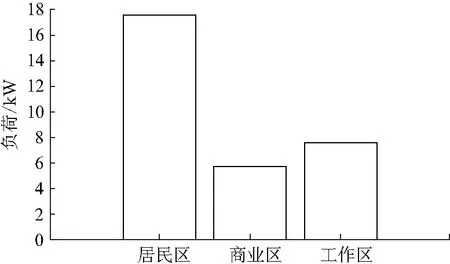
图12 各个地区的日充电量
得到各个区域的充电负荷后,采用改进的麻雀搜索算法求解充电设施规划模型,其中充电站的数量约束依次从4递增到12,结果如图13所示。

图13 充电站规划成本
由图13可知,当充电站数量为9时,充电站规划总成本达到最优(3 265万元)。配置的节点编号见表5,9个充电站总的各项成本见表6。
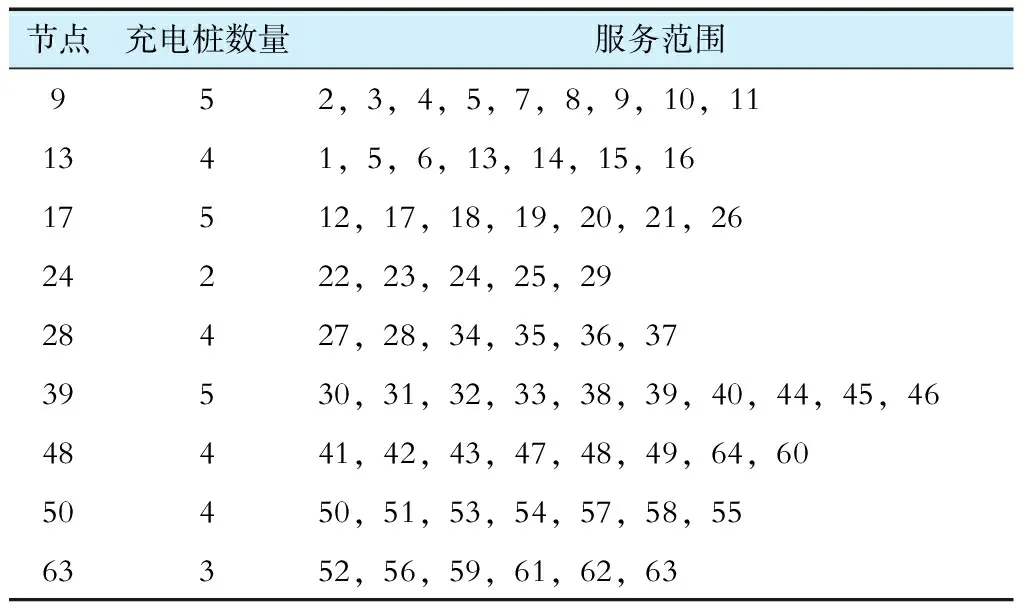
表5 充电站所在节点及服务半径
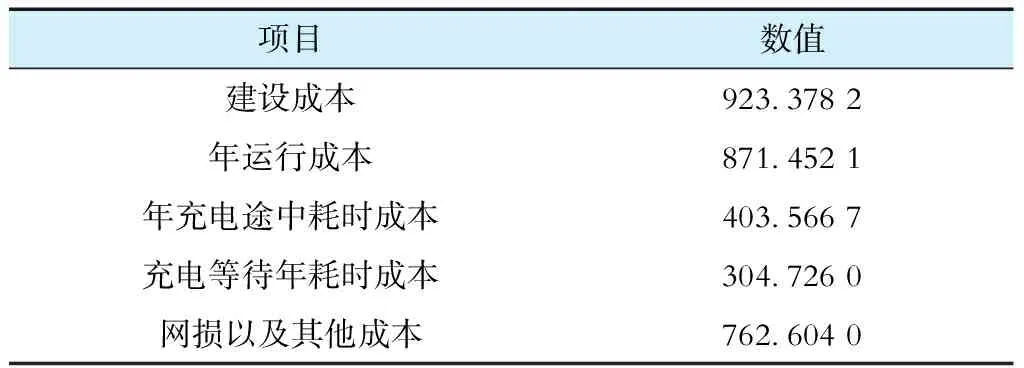
表6 各项成本
4.3 算法对比分析
为了验证改进麻雀搜索算法的优越性,将麻雀搜索算法、改进麻雀搜索算法及MATLAB自带的粒子群优化工具箱进行计算对比。
采用传统麻雀搜索算法、改进麻雀搜索算法、粒子群优化算法分别进行10次计算,得到收敛次数、适应度函数、计算耗时的平均值,见表7。由表7可知,改进麻雀搜索算法的计算耗时更少,收敛更快,且规划方案较为合理。

表7 算法性能对比
5 结论
本文考虑了多种因素,建立以投资方充电站建设和运营成本、用户等待时间成本、环保成本之和最小为目标的EV充电站规划模型,通过算例仿真,得出以下结论:
a)对规划区域进行充电负荷时空分布预测,采用基于拉格朗日松弛法的有序充电策略,使峰谷差率下降至32.56%,为充电站选址定容规划打好基础。
b)所提出的改进麻雀搜索算法在传统的麻雀搜索算法中引入反向折射学习和柯西变异策略,保持了收敛速度且提高了跳出局部极值的能力。与传统麻雀搜索算法和粒子群优化算法比较的结果,验证了改进麻雀搜索算法的求解能力及其在充电站规划中的应用效果。
在实际应用中,本文方法仍存在不足之处,后续研究可将换电站、用户的主观行为和心理偏好、天气等因素纳入选址模型,使充电站的选址定容模型更加合理。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
智慧电力(2022年6期)2022-07-04
煤气与热力(2022年4期)2022-05-23
煤气与热力(2022年2期)2022-03-09
环球时报(2020-12-08)2020-12-08
小资CHIC!ELEGANCE(2019年5期)2019-04-30
智能计算机与应用(2018年3期)2018-09-05
电脑知识与技术(2016年30期)2017-03-06
商界评论(2016年12期)2016-12-08
