
换道安全性研究综述
2022-10-20 02:28涂程瑞刘树伟
时代汽车 2022年20期
涂程瑞 刘树伟
辽宁工业大学汽车与交通工程学院 辽宁省锦州市 121001
1 引言
随着科技的快速发展,汽车的安全性受到人们越来越多的关注,可以将汽车安全性分为主动安全和被动安全两大类。汽车被动安全指汽车在发生不可避免的道路交通事故后,车体结构及乘员约束系统对车内乘员或车外行人进行保护,避免其发生严重的伤害或使伤害程度尽可能降低的能力。主动安全指通过汽车上装备的雷达,摄像头等感知周围环境后可以提前识别潜在的危险并及时给驾驶员发出预警,降低危险发生的风险。在过去的几十年里人们为了提高汽车的整体安全性对被动安全技术进行了深入的研究,但是由于现代交通状况越来越复杂,近年来主动安全技术在汽车领域运用的十分广泛,更多的学者也越来越重视主动安全的研究。跟驰和换道是车辆运行过程中最基本的两种驾驶行为,与跟驰相比,换道行为更为复杂,极大地增加了交通事故发生的可能性,因此研究换道过程中的安全性变得尤为重要。
2 换道安全研究现状
为了提高换道的安全性,国内外许多专家学者对换道模型进行了大量研究。在讨论车辆的换道模型时可以从三个不同的维度进行展开,每一种换道模型考虑换道安全的角度也各不相同,根据不同的交通场景选择适合的换道模型能改善道路通行能力,解决更多的 交通安全问题。
2.1 基于安全距离模型
Hossein Jula 等人为了提高车流速度和换道过程的安全性,对车辆运动学特性进行分析,判断与周围其他车辆或障碍物的相对距离,评估车道变换时的安全性,建立了换道安全距离模型并进行仿真验证。王江锋等从换道需求和换道安全两方面进行展开,以车辆动力学的理论为基础分析换道时车辆运动关系,给出多车辆、多车道的动态环境下的最小安全距离模型。关于换道的距离模型,不只有最小安全距离模型还有提取车头时距的安全距离模型和基于制动过程的安全距离模型。车头时距是相邻车辆分别通过相同的指定点的时间差其大小为车间距离与速度的比值,当车辆以较小相对速度跟随行驶时两车间的距离与后车速度有一定的线性关系基于这种特性建立的模型。陈雷进等对城市快速路基本路段车头时距分布特征进行分析,得到不同车道车头时距分布规律,为基本路段其他问题研究提供了理论依据。正常制动过程为驾驶员意识到前方车辆的行驶状态发生改变,对周围行车环境进行分析及时调整车速或者紧急制动,待车辆平稳停止。基于制动过程的安全距离模型是在分析正常制动过程后建立以最大减速度,初始速度,初始距离以及制动迟滞时间为前提的安全距离模型。李小庆等采用了符合乘员舒适性的减速度分析汽车纵向、横向转动的最小安全距离,提出了基于最小安全距离的智能汽车避障控制策略。
2.2 基于间隙接受模型
间隙是指汽车在行驶过程中能够安全换道至相邻车道的间距或者时距。在车辆进行插空换道时的间隙满足当前安全要求,那么此间隙是可接受的。在基于间隙接受模型方面,新加坡国立大学的Weng 等研究发现车辆换道时需要与前导车间隙或后随车间隙满足一定的相对距离。另一类是间隙接受概率模型,换道与否服从logit 二元模型中估计的概率分布。谭云龙充分考虑合流区换道过程中主线车辆与汇入车辆之间复杂的礼让、协作等相互协调行为,以及驾驶员特征差异对驾驶行为的影响,分别构建协同型及强迫型车辆换道模型和间隙接受模型。
2.3 基于元胞自动机模型
元胞自动机是一个空间、时间和状态离散的仿真模型,主要由元胞空间、元胞状态、邻域和状态更新规则构成,具有模拟复杂系统时空演化过程的能力。通过对元胞自动机交通流模型深入地探索,拓展模型的种类和改进已有的分析方法,建立了融入有换道规则判断的元胞自动机模型。在基于元胞自动机模型方面,Chowdhury分析变道规则的影响,通过对比两种不同类型车辆的双车道交通的粒子跳跃模型提出更适合当前交通流的双车道换道规则,并建立STCA 模型。李珣在车路协同的系统下,结合未来车辆间可能交互的基础参数,引入函数对车辆关系进行数学描述,通过协同换道的规则建立了元胞自动机模型。
3 换道行为分析
3.1 换道决策分析
在车辆进行换道时不仅换道模型会影响换道时的安全性,正确的换道决策也会提高整车换道行驶的安全性,因此对于换道决策的研究也十分重要。换道决策模型一般会通过车载传感器收集车辆运行时周围环境信息,综合驾驶员驾驶风格特点,驾驶习惯等给出合理的判断。换道决策在什么条件下形成的,需要先了解驾驶员在什么条件下会产生换道的需求。车辆行驶中在遇到不同的道路场景,不同的道路类型时产生换道的原因也多种多样,因此换道决策模型的研究应该适用于大多数的换道情景。很早之前就有对换道决策的研究,比如Gipps 模型在确保交通模拟中的车辆面对真实交通中常见的情况时表现合乎逻辑的前提下,考虑交通信号灯,障碍物和不同车型的影响,分析换道过程中的决策和影响因素。Yang Qi等人通过分析Gipps 模型,并以此为基础设计出了MITSIM 模型,MITSIM 模型将换道的过程分为三大板块,首先需要判断是否有换道的必要性,其次选择合适的换道间隙和目标车道,最后实施换道操作。在MITSIM 模型中忍耐因子和速度差因子是最重要的两个参数,分析两个参数的关系可以判断当前状态是否有换道的需求,同时可以建立相应的数学公式。Esmaeil Balal 等在研究驾驶员意图产生和选择合理的换道时机时运用模糊推理系统对车辆自由换道二元决策进行建模,并选用NGSIM数据集对模型进行验证。田赓针对城市道路复杂动态环境,综合考虑周边车辆运动状态的影响,运用机器学习理论,建立了仿生换道决策模型。不同的换道模型和决策对道路交通安全都起到了重要的作用,同时也推动驾驶辅助系统领域的发展,提高了交通运行的效率。构建安全换道的决策模型,可以有效减小因换道决策错误而导致的不可逆转的安全事故,提升了行车时是否可以安全换道的判断能力。
3.2 换道过程分析
换道是驾驶员或智能车辆决策系统根据周围车辆速度、自身车速、自车与周围车辆的间距以及自己的行驶目的,调整车辆位姿完成行驶目标的综合行为。车道保持和换道行驶是在日常交通环境下所面临的最基本的两种驾驶行为。车道保持是指车辆保持当前行驶状态在原车道内行驶,换道行驶是指驾驶员受到交通规则的影响或者为了更好的驾驶条件而驶离本车道。换道一般可分为强制换道和自由换道。强制换道是指车辆行驶途中在短时间内必须完成换道行为,比如前方道路施工,进出匝道以及躲避障碍物等;自由换道是指为满足更好的行驶条件而选择变更车道,比如前方车辆压速或预期驶入其他车道等。驾驶员在进行换道时需要对本车道附近的车辆行驶状态,目标车道上附近车辆行驶的状态实时关注,以防止车辆换道时与周围车辆发生碰撞。在车辆行驶过程中,本车道后方车辆与其为跟驰状态因此不考虑两者的安全关系。本车道内的前方车辆,换道后目标车道的前后车辆的相对位置,相对速度等因素的存在会直接影响行驶车辆的换道安全性。在行驶中的车辆与本车道前方车的距离需满足最小纵向安全距离否则在车辆进行换道的过程中可能发生斜向碰撞。在车辆换道进入到目标车道时与目标车道前后车辆会有侧向刮蹭和追尾的风险,因此需要一定的安全距离,同时相对速度不宜过大。在换道安全的前提下,车辆进行换道时的过程分为三部分:首先,车辆通过改变方向盘的转角调整前进方向,使车辆沿一定的角度驶入目标车道。其次,在车身完全进入到目标车道后再次改变方向盘转角使车辆回正;最后,根据目标车道上的相对间距,车流密度等条件对本车道内行驶的车辆方向进行微小的调整,使换道后的车辆能维持当前的行驶状态在目标车道上继续行驶。现有的模型研究很少有考虑车身实际尺寸以及变道时车道宽度带来的影响,而影响换道的诸多因素也会影响换道决策,所以寻找一个合适的换道模型和换道决策能更好d 的提高换道时的安全性,为驾驶人员的生命安全保驾护航。下图所示为典型的换道场景。
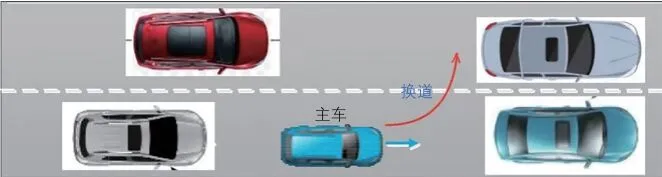
图1 典型换道场景
4 换道安全性研究方法
在分析安全距离、间隙接受,以及元胞自动机换道模型后发现用于判断是否可以换道的间隙接受模型易受到周围车辆相对速度,相对距离以及车流密度的影响,而元细胞自动机换道模型侧重于分析换道需求以及检测换道概率,依据的换道规则不能随不同车辆行驶状态变化而发生改变。但是现在许多研究换道安全特性的方法都是从避免碰撞这方面进行考虑的,因此换道安全距离在实际应用十分广泛,比如最小安全距离模型。最小安全距离是指与本车道和目标车道实现无碰撞的最小纵向距离。选择最小安全距离作为换道安全性评价指标,研究与其他车辆的碰撞约束条件,可以使车辆在换道过程中始终保持在最佳的安全距离范围之内,建立相应的安全换道距离模型,也为后续换道决策提供理论依据。在换道决策的选择上,对比分析机器学习和模糊推理决策方法,机器学习可以准确地表达输入与输出之间的非线性关系,但是基于机器学习的模型为了更好的模拟驾驶员的驾驶行为需要大量的从自然驾驶数据中训练,训练数据集覆盖范围广,学习周期长。而模糊推理在研究车辆行驶环境与换道决策的复杂的非线性关系中能进行模糊综合判断,处理一些不确定的关系,与人类驾驶员在处理换道时的不确定特性相似,能更好的反应驾驶员换道意愿。在实际生活中我们面临的交通环境复杂多变,具有很强的动态属性,驾驶员进行换道操作时容易受主观因素和驾驶经验的影响。所以融合最小安全距离和模糊推理的换道决策建模方法能有效减小换道时的碰撞风险也更加符合日常驾驶换道逻辑。
5 总结与展望
为了更有效的避免交通事故的发生,通过深入研究车辆换道时的安全特性,从换道安全模型,换道决策以及换道过程进行分析对比得到融合最小安全距离和模糊推理的换道决策建模方法。当前汽车智能化已是未来汽车发展的主要方向,不仅仅是新能源车企许多传统燃油车企也纷纷大力研究相关技术,并不断突破创新,逐步形成了独立自主开发和控制的能力,使汽车的安全性能大大提升。行车安全性已经成为汽车智能化追求的主要目标,如汽车防抱死系统,车道保持,紧急避让系统等主动安全措施的应用十分广泛。换道的安全距离模型以及模糊推理决策模型的应用为换道时驾驶员提供了安全性判断和辅助决策的支持,同时也推动了汽车主动安全技术的发展与进步。当前分析换道行为和考虑的场景过于理想化和单一化,在实车运用时应该更多考虑交通组成成分的影响以及交通规则的限制,因此研究者们还需进一步深入探索和完善。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年7期)2022-04-20
现代装饰(2022年1期)2022-04-19
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年4期)2022-03-07
小资CHIC!ELEGANCE(2022年2期)2022-01-11
延河(2017年7期)2017-07-19
阳光(2017年7期)2017-07-18
中学科技(2015年11期)2015-11-25
小天使·四年级语数英综合(2011年4期)2011-06-30
