含冗余拉索的棱柱型张拉整体结构成形过程分析
2022-10-18 02:45:24周继凯
东南大学学报(自然科学版) 2022年5期
张 沛 冯 健 周继凯
(1河海大学土木与交通学院, 南京 210098)(2东南大学混凝土及预应力混凝土结构教育部重点实验室, 南京 211189)(3东南大学土木工程学院, 南京 211189)
柔性索杆张力结构的施工成形通常需要借助自身的索单元来完成,通过对主动索进行张拉以提升结构整体,从而达到初始设计位形,同时将预应力施加到位.由于主动索一般都是按阶段分批次进行安装和张拉,故索杆体系的成形过程具有明显的阶段性.在成形过程中,结构的不完整性及预应力的缺失导致索杆体系处于松弛态.随着主动索的有序安装和张拉,结构的拓扑、内力和刚度逐渐累积,刚体位移和弹性位移并存且相互耦合,结构出现大位移、大转角以及体系变化,形成强几何非线性方程,给施工模拟带来了一定的难度.
索杆张力结构施工成形分析既是形态分析又是力学分析,需要解决一个松弛态索杆系统的平衡形态求解问题[1].杨晖柱等[2]将非线性有限元法与广义逆矩阵相结合,跟踪索杆张力结构张拉成形过程中的机构运动路径;任涛等[3]采用非线性有限元法对某马鞍形径环向单层索网罩棚的整体提升过程进行了模拟分析;邓华等[4]基于力密度法的基本思想,提出了一种松弛索杆体系几何非稳定平衡形态的通用找形方法,并模拟了一个环形张力索桁罩棚结构的成形过程;董石麟等[5]以某Levy型索穹顶结构为例,提出了7种预应力张拉成形方法,并采用动力松弛法(DR)对各方法进行施工全过程模拟分析;叶小兵等[6]将机械多刚体系统动力学分析方法用于模拟索穹顶结构从地面到设计位置的运动过程和预应力施加过程;赵阳等[7]推导了索杆单元的向量式有限元基本方程,并对某大跨马鞍形轮辐式索杆张力结构进行了施工成形分析.以上方法均是从零状态几何出发,求得结构的初始设计位形,属于正分析方法.袁行飞等[8]以结构的初始设计位形为已知条件,通过拆杆法逆向追踪索穹顶结构的施工过程,反求结构的零状态几何,提出了反分析方法;郭佳民等[9]利用ANSYS有限元软件,对于一个索穹顶结构,按照反分析思想,进行了2种施工方案下的施工模拟计算;张丽梅等[10]以索杆梁模型模拟索穹顶,采用非线性有限元法,建立了索穹顶逆向施工全过程分析方法.
然而,现有文献对柔性索杆体系成形方法的研究主要以索穹顶、索桁架和索网结构为分析对象;对于满足自平衡、自支承条件且形态多变的张拉整体结构而言,则多将其设计成可展结构,研究机构方案的驱动方式及形态控制方法,并对其折展过程进行运动学和动力学分析[11-12].这种可折展的成形方式主要是为了适应航天结构中伸展臂或天线背架结构的设计需求,应用于建筑结构中则存在一定的局限性.
本文以一类带有冗余拉索的棱柱型张拉整体结构为研究对象,对其拓扑构成、几何形式和成形条件进行分析,着重研究了其自应力模态、刚度等力学特征随关键几何参数——相位角的变化规律.结合此类结构的拓扑特征,给出了分批次张拉2组斜索的成形方法.采用简化的动力松弛法,对成形过程进行逆向追踪,通过控制杆件的轴向刚度模拟主动索的移除、被动索的松弛或张紧,确保结构的拓扑构成不因拉索退出工作而发生变化,最终确定了各施工阶段的节点坐标和单元内力.整个分析过程概念清晰,简便易行,经适当调整可推广至其他类型的张拉整体结构.最后,通过算例验证了本文方法的实用性和有效性.
1 加强型棱柱张拉整体结构的几何及力学特征
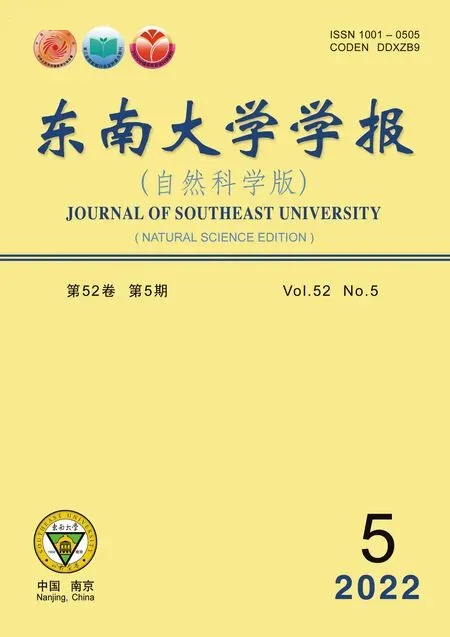
经典v棱柱张拉整体结构包含2v个节点、v根压杆和3v根拉索,其拓扑示意图见图1.假定上下底面外接圆半径为R,相对距离为H.水平索连接上下底面的相邻接点,分别记为SS1和SS2.竖向拉索连接上底面节点2i-1和下底面节点2i(i=1, 2, …,v),记为XS1.压杆连接下底面节点2i和上底面节点2(i+j)-1,记为G1,其中j可取比v小的任意自然数,表征压杆相连两节点的错位程度;以图1为例,压杆连接两节点的编号为2i和2i+1,即为j=1对应的拓扑关系.当且仅当上下底面相对转角θ(即相位角)满足如下关系式时:
(1)

图1 经典棱柱张拉整体结构拓扑示意图(j=1)
经典v棱柱张拉整体结构存在唯一自应力模态[13].该自应力模态同时也是整体可行自应力模态[14],除满足自平衡条件外,还满足整体对称性条件(即同一编组的杆件内力相等)和拉压可行条件(即拉索受拉、压杆受压).
在图1的基础上,另增v根冗余拉索连接上底面节点2i-1和下底面节点2i+2,记为XS2,即可构造出一系列变体结构,本文称之为加强型棱柱张拉整体结构,其拓扑示意图见图2.由平衡矩阵理论[13,15]验算可知,冗余拉索XS2的引入使得内部机构位移模态数由2v-5减少为v-3(v=3, 4, 5,…);自应力模态数则由1增加为3,整体自应力模态数仍为1,与v及相位角θ的取值无关.要使唯一的一组整体自应力模态同时满足拉压可行条件,则相位角θ须满足下列关系式[13]:
(2)
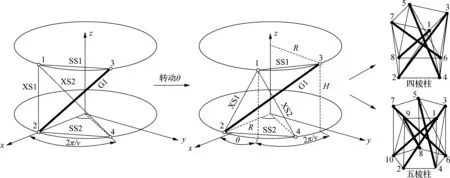
图2 加强型棱柱张拉整体结构拓扑示意图(j=1)
随着冗余拉索的引入,确保其存在整体可行自应力模态的相位角不再是由式(1)给出的离散值,而是扩展为由式(2)给出的闭区间.
加强型棱柱张拉整体结构的几何构型可通过R、H和θ三个参数确定,其结构刚度则可由切线刚度矩阵K的最小特征值定量描述[16-17].为了得到杆组内力和结构刚度随相位角θ的变化规律,不失一般性,以加强型四棱柱为例,令R=1,H=2,各构件的轴向刚度满足EA=1(其中,E为弹性模量,A为构件截面积),预应力水平系数取0.5,相位角θ在式(2)定义的闭区间内自左向右渐变,分别按照文献[15-16]给出的方法,计算整体可行自应力模态及K的最小特征值,结果见图3.由图可知,在θ由(1/2-1/v)×180°向90°变化的过程中,水平索SS1和SS2的拉力有所增加;压杆G1的压力先增大后减小;斜索XS1的拉力由初始值减小为零;斜索XS2的拉力则从零开始不断增大.与此同时,结构的刚度指征——K的最小特征值逐渐增大.当相位角θ=90°时,结构由式(1)中j=1对应的几何构型转化为j=2对应的几何构型.文献[13]通过同步减小冗余拉索SS2的长度,实现了从j=1到j=2的形态重构.由此可知,与经典棱柱型张拉整体结构相比,加强型张拉整体结构的相位角可取值范围显著增大,故对施工精度的要求大大降低.同时,结构刚度随相位角的增大显著增大,这些力学特征均使其更加适合作为建筑结构使用.

(a) 杆组内力

(b) 结构刚度
2 加强型棱柱张拉整体结构的成形过程分析
2.1 施工成形方案
索杆张力结构的施工成形可通过改变主动张拉单元的无应力长度来实现.由于张拉整体结构在拓扑形式、边界约束、力学性能等方面与建筑结构中常见的索穹顶结构、索桁结构等存在差异,导致现有张拉方案无法直接套用.本文首先对张拉整体结构设置临时吊点,增强其边界约束,为后续张拉过程提供支承;然后,结合加强型棱柱张拉整体结构的拓扑形式,提出了一种分批张拉2组斜索的成形方案.具体步骤如下:
①在放样阶段,除斜索按松弛长度下料外,其余索杆均按设计原长下料,即斜索设定为主动索,水平索设定为被动索.
②按拓扑关系组装被动张拉单元,将已组装好的部分通过吊点悬挂.间隔选取上平面节点作为吊点.
③安装斜索XS1并同步进行张拉,到位后将其锚固.
④安装斜索XS2并同步进行张拉,到位后将其锚固,拆除吊点,施工结束.
2.2 基于动力松弛法和反分析思想成形过程分析
成形过程分析的目的是对结构施工成形的全过程进行追踪,预测成形过程中将要经历的施工平衡态,给出可有效指导施工的各项结构参数,从而确保最终达到理想的设计形态.文献[8]基于索穹顶结构的施工过程,提出了施工控制反分析的思想,从结构的理想设计形态出发,分批逆序拆除主动张拉单元,直到将结构还原为主动索安装前的零状态为止.基于2.1节提出的成形方案,引入简化的DR法,逆向追踪加强型棱柱张拉整体结构的成形过程(见图4).从已知的理想设计形态出发,无需人为设定初始迭代形状.算法不受刚度矩阵奇异的影响,无需假定刚体位移.因此,模拟过程与真实的施工过程更加吻合.

图4 基于动力松弛法和反分析思想的加强型四棱柱张拉整体结构施工分析示意图
假定J1为本批次待拆除主动拉索编号的集合,J2为不必拆除的拉索编号的集合,J3为压杆编号的集合,则拆索前的节点平衡方程为

(3)


(4)
为使应用更加方便,将DR法的求解步骤进行如下简化:

②令ki=0(i∈J1),并扣除其质量对等效节点荷载向量f的贡献.
③按式(4)计算其余构件的轴向刚度,代入式(3)求得第p步节点不平衡力向量Rp.令ε为预设的收敛容差,判断收敛准则
‖Rp‖2<ε
(5)

④令M为节点质量矩阵,显然M为对角矩阵,对角线元素取等效节点质量.第p步的节点加速度向量ap为
ap=M-1Rp
(6)
⑤通过试算确定常数步长d,第p步的节点速度向量vp按中心差分格式确定,对于首次迭代,有
(7)
非首次迭代有
vp=vp-1+apd
(8)
第p步的体系总动能Dp为
(9)
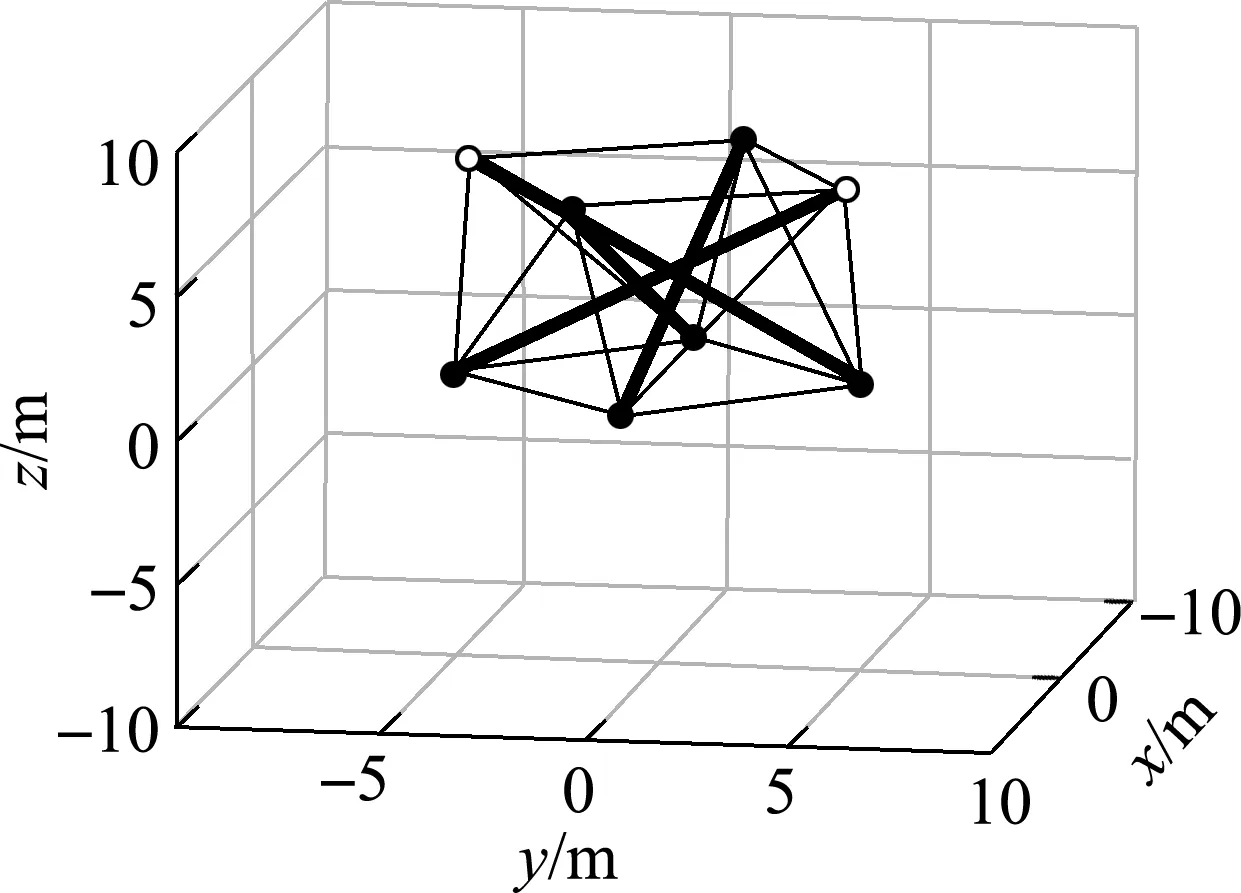
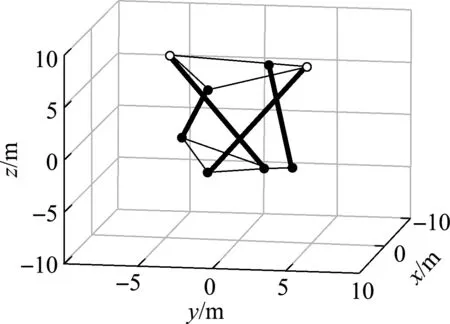
根据运动阻尼的思想,验证Dp ⑥第p+1步的节点坐标向量xp+1为 xp+1=xp+vpd (10) 令p=p+1,跳转至步骤④. 图5 加强型四棱柱张拉整体结构理想设计位形透视图 GPa;材料密度均为7 850 kg/m3,节点质量按汇交于此处索杆总质量的25%计算.各组构件的截面面积、初始内力及设计原长见表1.以理想设计形态作为体系施工成形反分析的初始状态,依次放松XS2和XS1两组斜索.放松斜索XS2时,取时间步长d=1.6×10-3;放松斜索XS1时,取d=1.9×10-3,并令收敛容差ε=10,应用简化DR法计算各施工平衡态的节点坐标和单元内力,结果分别见表2和表3.各施工平衡态及典型中间状态的结构位形见图6. 表1 加强型四棱柱张拉整体结构理想设计形态下的构件尺寸和内力 (a) 第1步(理想设计位形) (b) 第2步(撤除XS2) (c) 第600步 (d) 第1 589步 (施工平衡态2) (e) 第1 590步(撤除XS1) (f) 第2 000步 (g) 第2 600步 (h) 第3 100步 (i) 第5 824步(施工平衡态1) 表2 加强型四棱柱张拉整体结构各施工平衡态的节点坐标 m 表3 加强型四棱柱张拉整体结构各施工平衡态的单元应力 MPa 1)通过引入斜向拉索,构造出经典棱柱张拉整体结构的变体——加强型棱柱张拉整体结构.对此类新型张拉整体结构成形条件的研究表明,确保其存在整体可行自应力模态的相位角θ不再是某个离散值,而是扩展为一个区间.该区间的左端点为对应经典棱柱张拉整体结构的相位角,右端点为定值90°.在相位角由左端点向右端点变化的过程中,结构的刚度指征——切线刚度矩阵的最小特征值逐渐增大.当相位角θ=90°时,结构的几何构型恰为式(1)中j=2对应的情形. 2)基于加强型棱柱张拉整体结构的拓扑特征,提出了先设置临时吊点、后分批次张拉2组斜索的成形方法.该方案概念清晰,可行性好,经适当调整后亦可适用于其他类型的张拉整体结构. 3)采用简化的动力松弛法对成形过程进行逆向分析,既克服了DR法作正向分析时需人为设定初始迭代形状的不足,同时也避免了多数刚度方法处理刚度矩阵奇异及强几何非线性问题的劣势.实际计算时,通过控制杆件的轴向刚度模拟主动索的移除、被动索的松弛或张紧,确保结构的拓扑构成不因拉索退出工作而发生变化,最终确定包括节点坐标和单元内力在内的各施工平衡态的结构参数,为此类结构的张拉成形提供参考.3 数值算例











4 结论
猜你喜欢
河南医学研究(2020年27期)2020-10-18 14:28:56
数学物理学报(2019年2期)2019-05-10 11:33:18
物理学报(2018年22期)2018-12-18 05:58:24
新世纪智能(数学备考)(2018年9期)2018-11-08 11:07:32
北京航空航天大学学报(2017年10期)2017-04-20 08:51:25
世界汽车(2016年8期)2016-09-28 12:26:11
西安工程大学学报(2016年2期)2016-06-05 12:25:17
高中生学习·高二版(2016年8期)2016-05-14 14:03:17
现代传输(2016年6期)2016-02-22 03:30:13
肝胆胰外科杂志(2015年4期)2015-02-27 11:12:25