
基于神经模糊网络的分数阶Chameleon系统同步研究
2022-10-13 08:18陈嘉乐赵小山
天津职业技术师范大学学报 2022年3期
陈嘉乐,赵小山
(天津职业技术师范大学理学院,天津 300222)
分数阶微积分理论起源可以追溯到三个多世纪以前,由于当时计算效率低下,导致其在很长一段时间内只停留在纯数学领域,没有得到人们的重视。随着计算机技术的不断发展与完善,人们发现分数阶微分方程能够更加精确地对实际物理系统建模,有助于准确模拟各种系统的动力学特性,这使得分数阶混沌系统备受关注。现今,人们已经对混沌同步问题进行了广泛的研究,研究人员提出了许多控制方法,如自适应控制[1]、滑模控制(SMC)[2]、有限时间控制[3]等。
Chameleon系统于2017年被提出[4],其具有一个非常有趣的性质:根据系统中参数的取值,该系统可以没有平衡点,也可以有一系列的平衡点,或者只有1个稳定的平衡点。正是由于该性质让其拥有了Chameleon的名字,也引起了很多研究人员的关注与研究[5-6],但现阶段关于分数阶Chameleon系统的研究还很少[7]。
由于模糊逻辑和神经网络均具有良好的逼近能力,它们作为智能控制领域的代表,被推广并应用于分数阶混沌系统的各类控制问题[8-9]。采用神经网络的框架实现对模糊系统的设计,结合二者各自的优点,神经模糊网络(neural fuzzy network,NFN)成为一种强有力的控制方法。另一种有效的控制技术是SMC,其也被推广到分数阶系统的稳定性分析和控制器设计中[10-11]。与整数阶SMC相比,分数阶SMC具有跟踪速度快、鲁棒性强等优势。综合上述原因,本文研究了基于NFN和SMC的分数阶超混沌Chameleon系统的同步问题。选取了分数阶滑模函数,设计了控制器和参数自适应律,得到了分数阶超混沌Chameleon系统同步的充分条件。最后通过数值模拟验证了控制效果的稳定性和收敛性。
1 预备知识
定义1Caputo分数阶微积分定义

式中:0<α<1;t0为初始时刻;Dαf(t)=Ct0Dtαf(t),以下使用的分数阶导数均为Caputo定义下的导数。
性质1分数阶微分满足

引理1[12]假设x(t)∈R是连续可微函数,P∈Rn×n是一个正定矩阵,那么对于α∈(0,1),满足不等式

特别地,当x(t)∈R是一个连续可微函数时,可以得到

引理2[13]假设x(t)=0是非自治分数阶系统Dαx(t)=F(x,t)的平衡点,并且存在1个连续的李雅普诺夫函数V(x(t),t)和K类函数χr(·)(r=1,2,3),对∀x≠0,α∈(0,1),使得下列不等式成立

那么,上述分数阶系统在原点是渐近稳定的。
2 分数阶超混沌Chameleon系统
Chameleon系统用四维分数阶微分方程描述为

式中:x1、x2、x3、x4为系统状态变量;a、b为2个常数参数,通过调整参数的值,可以改变系统的动力学行为。
(i)当a=b=0时,系统有1条平衡线。
(ii)当a>b=0时,系统只有1个平衡点。
(iii)当a<b=0时,系统只有1个平衡点。
(iv)当a=0≠b时,系统没有平衡点。
选择a=b=0,α=0.98时,分数阶超混沌Chameleon系统的相轨迹如图1所示。

图1 分数阶超混沌Chameleon系统的相轨迹
假设式(6)为驱动系统,则相应的响应系统为
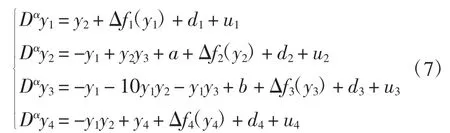
式中:yi为系统状态变量;Δfi(yi)为不确定项;di为外界干扰;ui为待设计的控制器。
同步误差定义为ei=yi-xi,得到误差系统为
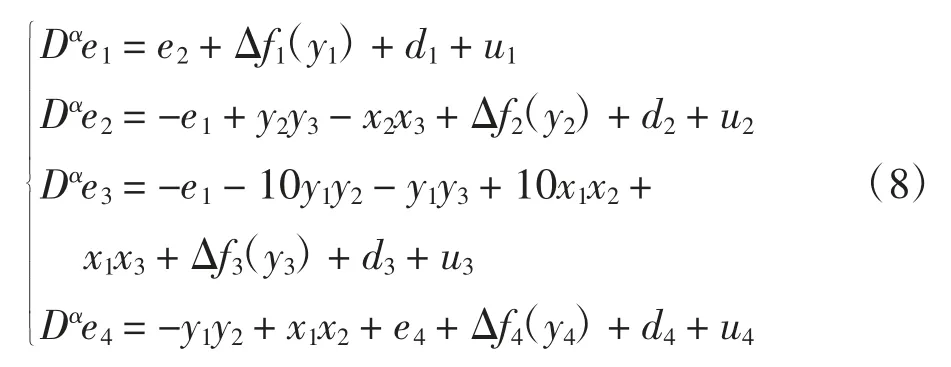
上下文中出现的所有i=1,2,3,4。
3 自适应神经模糊网络滑模同步
3.1 滑模控制器
分数阶滑模面构造为

式中:ki1和ki2为已知的正常数;2/3<q<1。
根据分数阶SMC理论,当状态轨迹在滑动模式下运行时,必须满足条件s(t)=0和Dαs(t)=0。得到

结合误差系统(8)和式(10),可得理想中的等效控制器为
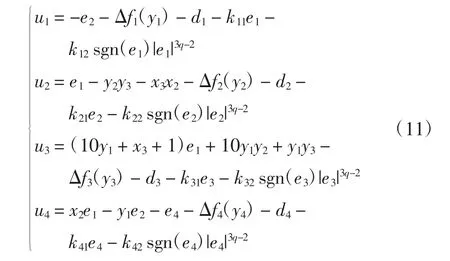
由于有关模型不确定性和外界干扰的信息部分未知或完全未知,故无法实现理想的控制器。因此,采用NFN来估计模型不确定性。
3.2 神经模糊网络
近年来,NFN成功应用在信息处理和控制应用等许多领域中[14-15],该网络由输入层、隶属函数层、规则层、归一化层和输出层5层结构组成[16],神经模糊网络结构如图2所示。
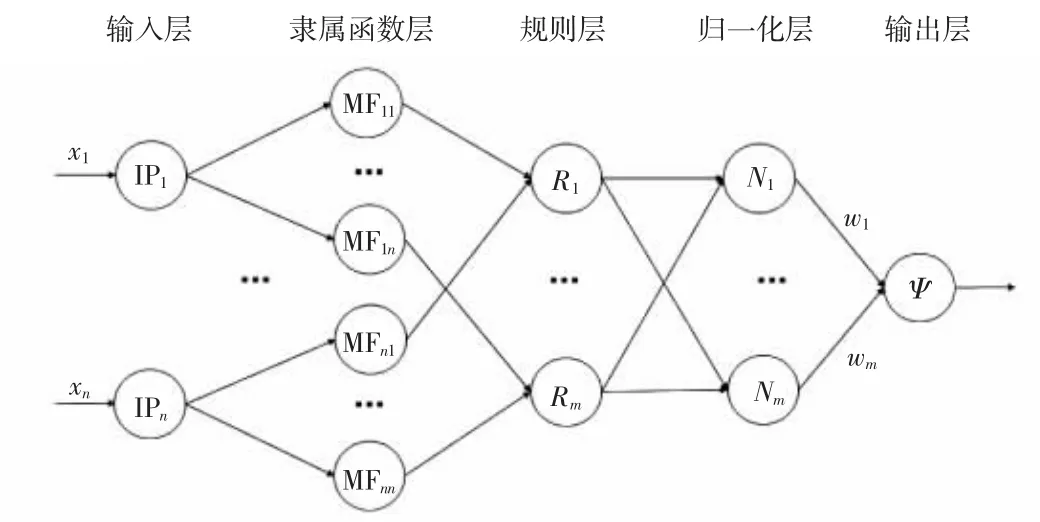
图2 神经模糊网络结构
未知光滑非线性函数可以用NFN的万能逼近定理近似如下[16]

式中:δ为近似误差;W*为参数W的最佳值。
由于实际中无法获得最优NFN,因此使用NFN估计器来估计最优NFN。NFN估计器定义为


假设1近似误差δ和外界干扰d满足以下条件

式中:λi1、λi2为未知的正参数。
然后,基于NFN的鲁棒控制器可以构造为

自适应参数更新律可以构造为
式中:系数k、ρ、μ皆为已知的正常数。
3.3 稳定性分析
定理1考虑具有不确定性和外界干扰的分数阶Chameleon系统,误差系统如式(8)所示。滑模面、控制器和参数更新律分别设计为如系统(9)、(16)、(17)所示。则系统(6)和(7)取得自适应神经模糊网络滑模(ANFNSMC)同步。
证明将式(12)与(16)代入误差系统(8)得


选取以下Lyapunov函数
根据引理1对V(t)进行分数阶导数,可以得到
将等式(10)、控制器(16)和参数更新律(17)代入式(20)可得
将式(18)代入得
因此,根据引理2,误差系统(8)的系统状态收敛于滑模面。这表明误差系统(8)可以被系统(16)中提出的控制器稳定,进而使得驱动系统(6)与响应系统(7)同步。
4 数值仿真
为了说明ANFNSMC对分数阶Chameleon系统同步的有效性,通过Matlab数值模拟仿真,检验控制器(16)的控制效果。
令系统的初始状态(x1(0),x2(0),x3(0),x4(0))=(0.3,0.5,0.5,0.2),(y1(0),y2(0),y3(0),y4(0))=(-0.2,0.4,0.3,0.5),并选择参数(k11,k12,k13)=(3,5,2),(k21,k22,k23)=(3,5,3),(k31,k32,k33)=(3,5,5),(k41,k42,k43)=(3,5,4),μi1=0.1,μi2=0.2。不确定项和外界干扰项选为

并且对于NFN的每个输入变量,使用高斯隶属函数exp(-(x-ml)2/2nl2),l=(1,2,3,4,5),定义5个模糊规则。输入隶属函数如图3所示。
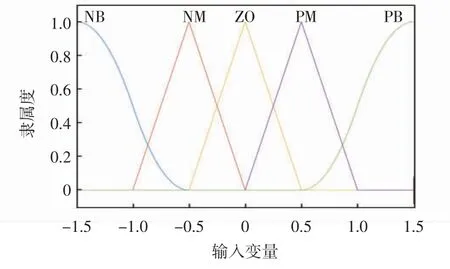
图3 输入隶属函数
所设计的控制器对分数阶Chameleon系统的同步控制结果如图4和图5所示。其中,状态变量同步时间历程如图4所示,图4显示了随着时间的推移,4对变量的同步状态。误差系统时间历程如图5所示,图5显示了随着时间的推移,误差向量快速收敛为0的情况。所有的仿真结果都表明了ANFNSMC在分数阶Chameleon系统同步中的有效性。
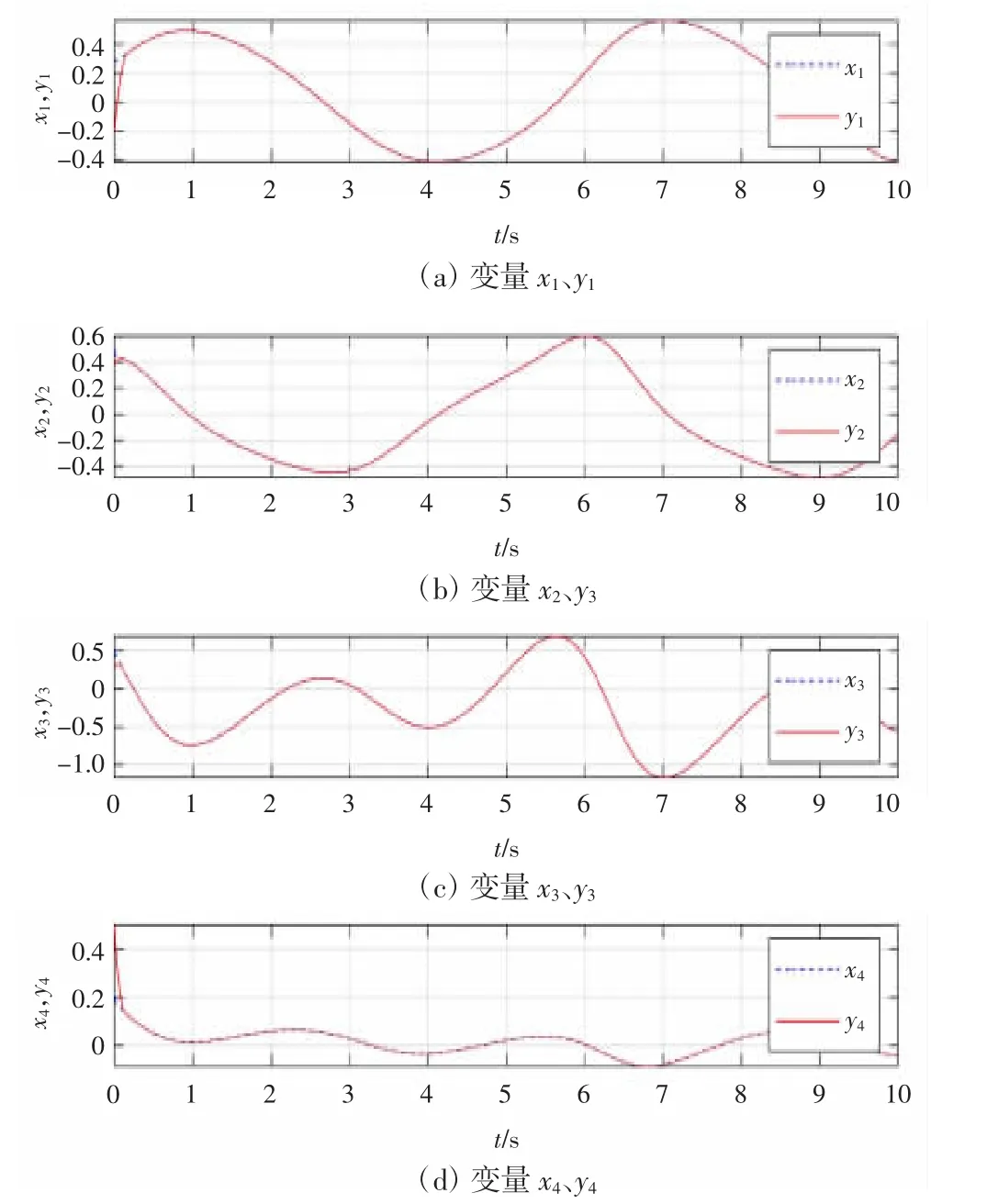
图4 状态变量同步时间历程
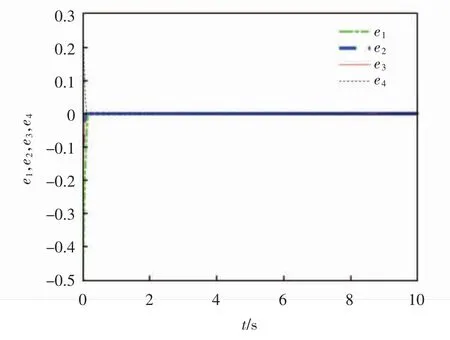
图5 误差系统时间历程
5 结语
本文根据ANFNSMC方法研究了具有不确定性和外部干扰的分数阶超混沌Chameleon系统的同步问题。介绍了分数阶超混沌Chameleon系统的动力学特性,给出同步误差系统。设计出相应的控制器与参数更新律,得到分数阶超混沌Chameleon系统ANFNSMC同步的充分条件。通过数值仿真得到同步误差系统在有限时间内接近0,验证了结论的可行性及控制器的收敛性与鲁棒性。
猜你喜欢
数字技术与应用(2021年2期)2021-04-22
湖南大学学报·自然科学版(2021年1期)2021-02-21
中国惯性技术学报(2019年6期)2019-03-04
烟台果树(2019年1期)2019-01-28
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
传媒评论(2018年7期)2018-09-18
导弹与航天运载技术(2016年2期)2016-10-14
IT时代周刊(2015年7期)2015-11-11
安徽师范大学学报(自然科学版)(2015年3期)2015-04-25
