基于四阶累积量的MUSIC算法性能仿真分析
2022-10-13 08:19:30李丹宁石和平曹继华
天津职业技术师范大学学报 2022年3期
李丹宁,石和平,曹继华,任 洁
(1.天津职业技术师范大学电子工程学院,天津 300222;2.天津职业技术师范大学汽车与交通学院,天津 300222)
阵列测向,又被称为空间谱估计或到达角(direction of arrival,DOA)估计[1],DOA估计主要是根据发送无线电信号,以及通过接收入射到阵列传感器上的相位差信息,判断在空中某一范围内的各个目标信号源,从而估计相对传感器阵列发射天线的方位角[2]。当前DOA估计的基础理论和技术正逐步走向成熟,但需要深入研究的方向仍有不少。其中,在阵列信号处理进程中又以Schmidt[3]所提出的多重信号分类(MUSIC)子空间类算法最具代表意义,被誉为DOA空间谱估计中的里程碑。MUSIC算法需要对接收数据的协方差矩阵进行特征分解,并且需预知噪声的特性和信源个数,这些条件在一定程度上限制了其实际应用。随后,Porat等[4]提出了MUSIC-Like算法,也可称为传统的四阶累积量的MUSIC算法。该方法利用四阶累积量与子空间方法结合,进行阵列信号的测向研究。Dogan等[5]推导出了四阶累积量抑制噪声的原理。文献[6-7]的研究则放宽了对信源数目的限制,验证了四阶累积量在实际阵列中所具备的特性。文献[8-10]也表明四阶累积量可以有效去除矩阵中的冗余元素。近些年来,科研人员对信号测向的研究层出不穷,同时四阶累积量在DOA估计中也得到越来越多的应用[11-17]。本文基于四阶累积量在阵列信号测向处理中的应用研究,根据文献[4-6]建立阵列窄带远场信号的接收模型,介绍四阶累积量的MUSIC算法[4]的基本原理,分析四阶累积量矩阵的处理过程,并通过扩展阵列孔径[18],使接收阵元数据得到充分利用,同时测得来波方向≥阵元数的信号。在不同的参数下,对该算法进行仿真,分析不同参数背景下该方法的估计性能。
1 窄带信号接收模型及算法原理
1.1 信号接收模型与MUSIC算法
假设在空间里有N个传感器构成的均匀等距直线阵列,存在M个远场窄带独立信源sl(t)(l=1,2,…,M)作用到该阵列上,该阵列的第i个接收数据的信号模型可以表示为

式中:ni(t)为第i个传感器阵元上的高斯白噪声,其均值为0,方差为σ2;ai(θl)则为第i个传感器阵元对第l个入射信号的空间响应。ai(θl)的表达式为

式中:d为该均匀直线线阵阵元之间的间距;λ为中心频率f0的远场窄带信号所对应的波长。
将N个传感器阵元所接收的数据构成一组列向量,表示成矩阵形式为

式中:X(t)=[x1(t),x2(t),…,xN(t)]T为传感器阵元接收到的N×1维的数据矢量;S(t)=[s1(t),s2(t),…,sM(t)]T则是M×1维的入射信号矢量;N(t)=[n1(t),n2(t),…,nN(t)]T为N×1的阵元上的噪声矢量;A=[a(θ1),a(θ1),…,a(θM)]T为N×M维来波信号所对应的导向矢量阵列流形矩阵。
对于零均值的阵列信号入射源,其接收阵列的信号数据的协方差矩阵可表示为

式中:E为数学期望的符号;RS为阵列接收入射信号数据的协方差矩阵E[S(t)S(t)H];I为N阶的单位矩阵;H为共轭转置操作。
传统MUSIC算法[3]是对数据协方差矩阵进行特征分解,进而通过空间谱估计中谱峰搜索估测入射信号的来波角度。对式(4)中阵列的协方差矩阵进行特征分解有

式中:US为信号子空间;UN为噪声子空间。
在实际DOA估计中是以最小化优化搜索实现的,故MUSIC算法的空间谱估计公式为

1.2 四阶累积量
假设接收数据X(n)为N维零均值的复平稳随机信号,那么该信号的四阶累积量需满足:
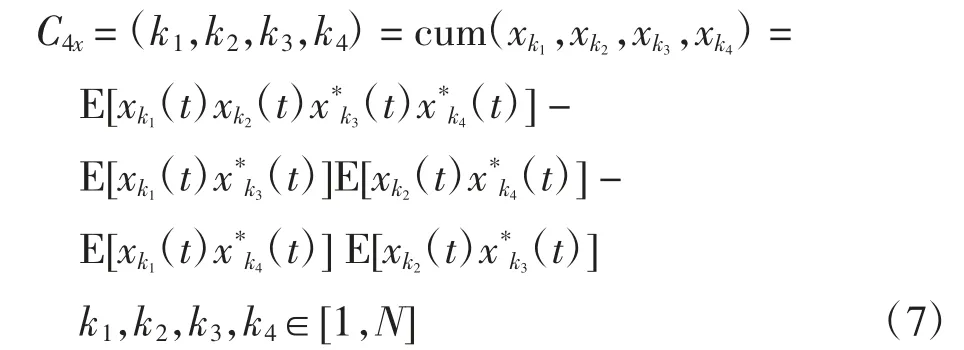
式中:cum为求累积量;*表示共轭符号。
显然,四阶累积量cum(k1,k2,k*3,k*4)随着k1、k2、k3、k4的变化,共有N4个值。为了方便操作,可以将该信号的四阶累积量的N4个值存入下面定义的N2×N2矩阵C4。

式中:CS为入射来波信号的四阶累积量矩阵;B为阵列扩展的阵列流形矩阵,该扩展阵列的表达式为

式中:○×为Kronecker积。
B矩阵中的每一列可表示为

式中:列向量b(θ)为扩展的阵列流形,由上述的Kronecker的积性质可得;b(θ)为N2×1维矢量,相对于a(θ)而言,其维数实现了扩展N倍,则便可估测窄带信源数≥阵元数的入射信号。
1.3 四阶累积量MUSIC算法
四阶累积量MUSIC算法[4]是通过用四阶累积量矩阵C4来替代协方差矩阵RX,对矩阵C4进行特征分解,并结合MUSIC算法,进行谱峰搜索即可估测出来波方向,具体步骤如下:
步骤1将阵列接收的信号数据模型式(1),按照累积量矩阵的式(7),构造四阶累积量矩阵C。
步骤2将矩阵C按式(5)进行特征分解,找到其相对应的特征值以及特征值所对应的特征矢量。
步骤3由矩阵C的特征值,判断入射信号源的数目,求出四阶信号子空间和噪声子空间。
步骤4针对所得信号参数的范围,结合MUSIC算法按式(6)进行谱峰搜索即可测出来波方向。
2 仿真分析
2.1 算法的比较
实验基于四阶累积量的MUSIC算法与传统MUSIC算法进行仿真,针对窄带远场信号进一步分析了2种算法的估计性能。设置10个阵元数,选取入射到传感器阵列的角度分别为-20°和20°,信号频率取值分别为π/4和π/6,SNR=0 dB,阵元的间距d=0.5λ,设置的快拍数为1 024,此时的噪声为高斯白噪声。2种算法仿真效果对比如图1所示。
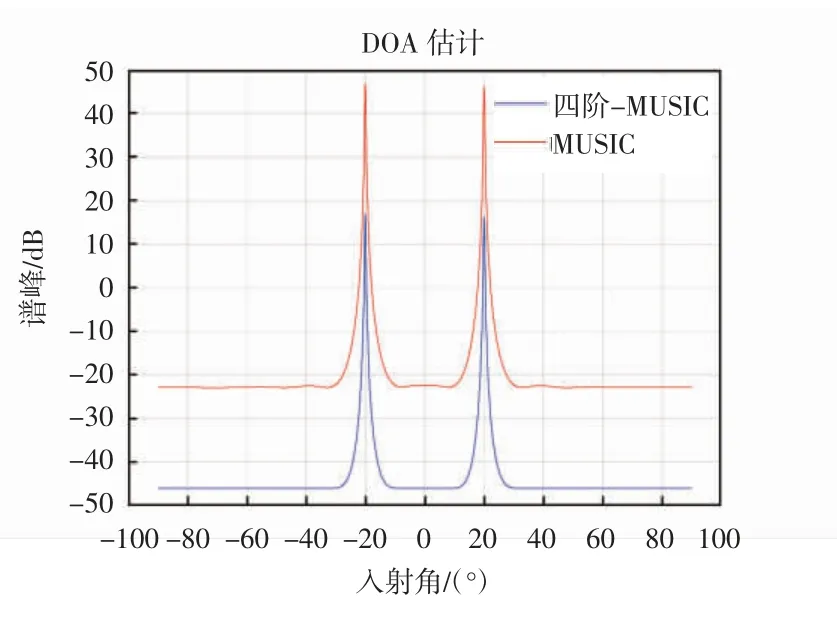
图1 2种算法仿真效果对比
从图1可知,四阶累积量的MUSIC算法[4]谱峰更尖锐,阵列测向的角度估计性能较好。相比较于MUSIC算法[3],由于高斯噪声三阶及以上的累积量恒为0,故能够更好地改善MUSIC算法的性能。
2.2 多信源数对四阶累积量MUSIC的影响
仿真实验取阵元数为4,信号源为6个独立不相关的远场窄带信号。来波方向分别在-60°和60°之间均匀分布,信号频率为π/6,信噪比均为0,传感器阵元之间的间距取0.5λ,实验快拍数为1 024,信号为高斯白噪声。多信号源的DOA估计如图2所示。
从图2可知,此实验中的阵元数目小于信源数,在该仿真实验下,四阶累积量MUSIC算法在多输入信源条件下依然能很好地分辨出信号的波达方向。实验结果表明,该算法没有阵列孔径的损失,并且通过阵列孔径的扩展,放宽了对信源数目的要求。
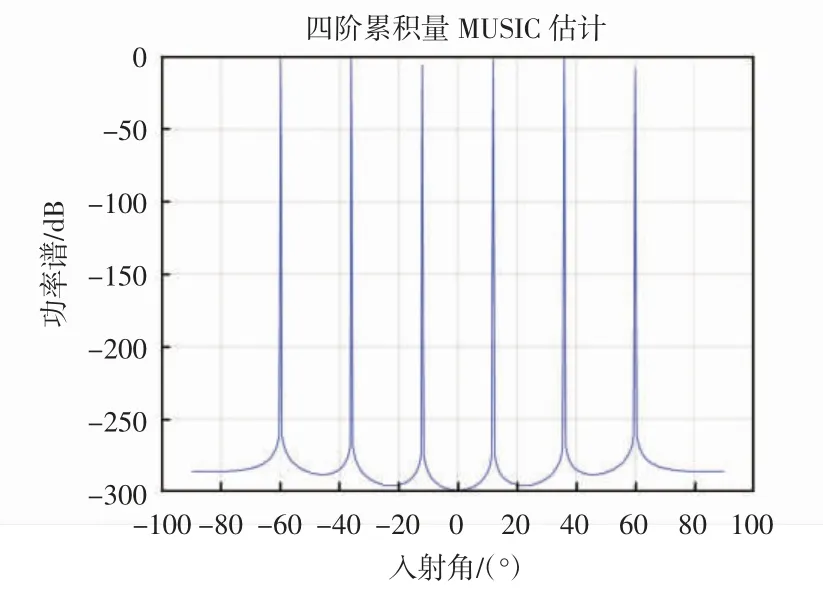
图2 多信源的DOA估计
2.3 不同阵元间距对四阶累积量MUSIC的影响
仿真实验设置选取10个阵元,阵元间距分别为0.1λ、0.5λ、0.8λ。来波角度分别是-20°和20°的独立不相关的远场窄带信号,信号的频率分别选取为π/4和π/6,SNR=10 dB,仿真实验的快拍数为512,噪声为高斯白噪声。不同阵元间距的DOA估计如图3所示。
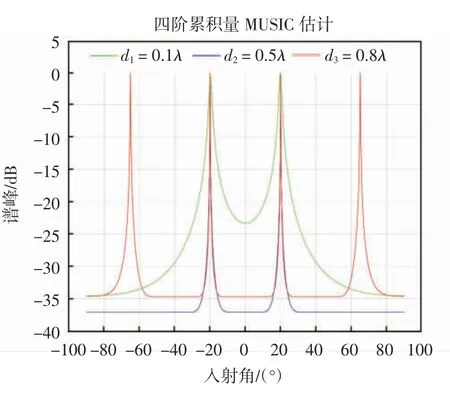
图3 不同阵元间距的DOA估计
从图3可知,当传感器阵元间距为0.5λ时,该算法的波达方向估计性能相对最好。当阵元间距为0.1 λ时,该算法可以估计出来波角度,但其旁瓣部分较大,性能较之阵元间距为0.5λ有所下降。当阵元间距为0.8λ时,空间谱出现混叠现象,但是旁瓣部分的谱峰较之阵元间距为0.1λ时明显得到抑制,更好地突出了其有效抑制高斯噪声的特性。因此,在实际空间测向中,选取合适的阵元间距可以使算法更好地估计入射角度。
2.4 快拍数对算法精度的影响
仿真实验设置6个阵元,传感器阵元之间的间距取0.5λ。来波角度分别为-20°和20°的独立不相关的远场窄带信号,信号的频率分别为π/4和π/6,SNR=10 dB,仿真实验的快拍数分别为10、100、1 000,噪声为高斯白噪声。另外,根据选取的快拍数10~1 000,对每次信号角度的估计值进行500次蒙特卡罗仿真,DOA估计精度如图4所示,归一化成功概率随快拍数变化情况如图5所示。
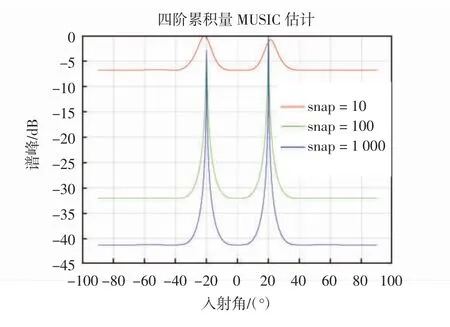
图4 不同快拍数的DOA估计

图5 归一化成功概率随快拍数变化情况
从图4可知,当快拍数=1 000时,本文分析的四阶累积量MUSIC算法估计性能较好。快拍数=10时,其谱峰不是特别尖锐。从图5可知,当快拍数为100时,归一化成功概率出现转折,在快拍数>100后,随着快拍数目越来越多,该算法的归一化概率趋于稳定,达到估计的理论值,但其计算量也随之增加,因此需要在实际的估计中选择合适的快拍数。
2.5 信噪比对算法精度的影响
仿真实验取阵元数为6,阵元间距为0.5λ。来波角度分别为-20°和20°的独立不相关的窄带信号,信号的频率分别设置为π/4和π/6,SNR分别为-5 dB、10 dB、25 dB,快拍数为512,噪声为高斯白噪声。另外,信噪比设置为5个间隔单位,选取范围为-5~25,并对每次选取的估计值进行500次蒙特卡罗仿真,DOA估计精度如图6所示,归一化成功概率随信噪比变化情况如图7所示。
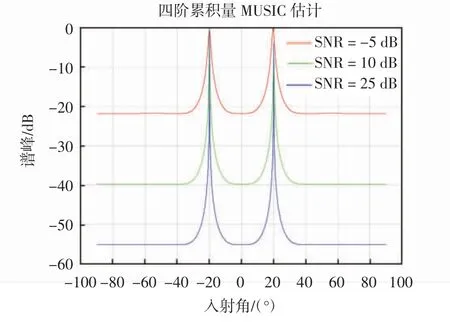
图6 不同信噪比的DOA估计

图7 归一化成功概率随信噪比变化情况
从图6和图7可知,该算法在低信噪比SNR=-5 dB时,依然可以分辨出来波方向。而当信噪比≥0时,归一化成功概率趋于理论估计值。随着信噪比取值的增加,本文介绍的四阶累积量结合MUSIC算法的阵列估计性能越来越好,并且谱峰搜索效果也很尖锐,这说明该算法DOA估计的角分辨率效果越好。但是,当信噪比达到一定值时,其估计性能会达到该算法的理论估计值。
3 结 语
本文介绍了一种结合四阶累积量的DOA估计技术,即四阶累积量MUSIC算法。该算法充分利用了扩展的阵列孔径,有效地估计出多于阵元个数的入射信号源。通过对比MUSIC算法的估计性能,说明该算法可以更好地估计来波角度,提高了阵列处理方法的分辨效率。此外,本文在不同阵元间距、快拍数和信噪比条件下,对算法的估计性能进行了仿真分析。研究结果表明,在实际阵列设计中,为降低运算的复杂度,应选取合适的参数,以实现更高的DOA估计的空间分辨率。
猜你喜欢
数学物理学报(2022年6期)2022-12-15 08:45:54
无线电工程(2022年4期)2022-04-21 07:19:44
山东冶金(2019年1期)2019-03-30 01:34:54
电子世界(2017年16期)2017-09-03 10:57:36
电子制作(2017年19期)2017-02-02 07:08:38
西部广播电视(2015年4期)2016-01-15 02:05:50
四川师范大学学报(自然科学版)(2015年3期)2015-02-28 14:07:53
电视技术(2014年19期)2014-03-11 15:38:13
现代防御技术(2014年5期)2014-02-28 18:26:18
电子设计工程(2014年18期)2014-02-27 12:00:16