
GNSS-A直线测量模式及航迹组合优化分析
2022-10-04 10:00马越原杨元喜曾安敏
地球物理学报 2022年10期
马越原, 杨元喜, 曾安敏
1 北京跟踪与通信技术研究所, 北京 100094 2 信息工程大学, 郑州 450001 3 地理信息工程国家重点实验室, 西安 710054 4 西安测绘研究所, 西安 710054
0 引言
中国陆地大地基准网建设已经相对完善,并且长期复测维持,已经具备厘米级精度(陈俊勇等,2007;杨元喜,2009;魏子卿,2008;魏子卿等,2011).北斗导航系统的建成并以其短报文通信服务、位置跟踪和精密单点定位功能进一步为陆地及水面用户提供了很大的帮助(杨元喜等, 2017;Yang et al., 2020).由于电磁波在水中的衰减速度较快,无法远距离传播,基于电磁波为信号载体的卫星导航技术无法适用于水下导航或定位,因此如何精确获取水下三维坐标位置,一直是实现真正意义上“全球”大地测量道路上的一道关卡.20世纪80年代,美国Scripps Institution of Oceanography的Spiess提出了全球卫星导航系统-声学定位技术(GNSS-A),利用全球卫星导航系统获取海面上的坐标,通过水下声学定位技术,将大地基准网延伸至了海底,为海底控制点高精度定位提供了一个可行的解决思路(Spiess,1985).
GNSS-A技术除了需要解决声学测距系统硬件、动态定位等技术上实现的困难外,还需要设计最优观测构型和定位模型以解决待估参数强相关性问题.例如,声速系统误差与垂直分量之间存在强相关性(Watanabe et al., 2020)、GNSS接收机与声学换能器之间偏移参数的垂直分量与海底控制点的垂直分量之间存在参数强相关(Chen et al., 2019; 马越原等,2021).声波在海水中的传播路径存在声线弯曲,进而引起测距偏差,这种偏差与复杂的海洋环境和声线入射角有关(赵建虎和梁文彪, 2019);此外,声速测量值还存在时空变化特性,即同一空间不同时间或同一时间不同空间所测得的声速信息是不同的,时空变化特性是由声波自身的物理特性以及不断变化的海洋环境特性造成的(刘伯胜和雷家煜,2010).这种声线弯曲引起的测距误差可以利用声线跟踪算法进行修正(李圣雪等, 2015; 王振杰等, 2016; Sakic et al., 2018; 辛明真等,2020),但该方法非常费时.如在海底定位测量期间获得海域的声速场,可以将它们引入到定位模型中进行估计,再在此基础上施加声线弯曲与延迟改正(Wang et al., 2020).对于时变引起的声速误差,则可以借鉴GNSS大气误差处理,发展海底基准网动态数据处理模型予以削弱(Yang et al.,2020).也有学者提出了一种广义的系统误差补偿的弹性模型(杨元喜,2018;Yang and Qin,2021),即根据不同的误差影响对函数模型进行弹性调整以减少系统误差对定位精度的影响,提高了定位结果精度.
目前,GNSS-A技术在日本的应用最为广泛,由于日本地理位置的特殊性,该技术主要用于揭示俯冲带的构造过程、监测地壳形变,特别是在西北太平洋和日本南开海槽(Yokota et al., 2016; Yasuda et al., 2017; Yokota and Ishikawa, 2019)和日本海沟(Kido et al., 2011; Watanabe et al., 2014; Tomita et al., 2017)处应用较多.然而,在这些研究中,都是由多个声学应答器组成,在海底对称布放,然后确定阵列中心(一个虚拟点),最后估计阵列位置之间的相对变化(Gagnon and Chadwell, 2007; Yokota et al., 2016; Watanabe et al., 2020).这种基于虚拟点所得到的研究结果在监测地震、板块运动等问题上具有很大的意义,但是其更注重阵列的整体变化,并没有得到各个声学应答器的精确位置,所以是无法在此基础上构建海底基准网.因此,为了切实可行的将陆地大地基准网延伸至海底,保证水下用户的定位和导航,基于单个固定站和多个锚系站的GNSS-A技术被提出(Yang and Qin, 2021),其中固定站用于海底基准的构建,锚系站用于水下用户的导航(欧阳明达和马越原,2020).

本文针对上述问题对圆加十字测量模式进行了系统分析,首先详细介绍了水下定位技术的定位模型及精度评估方法,然后详细分析了为什么要增加十字观测的原因以及为什么不单独使用十字观测的原因,此后详细推导了圆加十字测量模式的最佳走航半径,最后利用实测数据验证了在圆走航的基础上增加十字观测能有效改善垂向几何结构,提高对海底控制点的定位精度.
1 水下声学定位模型
水下声学定位技术的定位模式是基于距离交会原理,基本原理如图1所示.图1左下角,为测量船在当地水平坐标系(NEU)中的位置,NEU坐标系是一种地方空间直角坐标系,它的坐标原点在任一选定的测站上,其北向坐标轴(N坐标)为过原点的子午线的切线,指北为正;其东向坐标轴(E坐标)为过原点的椭球的平行圈的切线,指东为正;天顶方向坐标轴(U坐标)为过原点的由N轴与E轴决定的平面的垂线,指向天顶为正(黄立人等,2006).NEU坐标系有助于表示对不同坐标分量的误差影响(Yang and Qin, 2021),在本文中均采用当地水平坐标系,并取海底控制点在海面上的投影点为坐标系原点.其中,γ为声学测距与垂线方向的夹角,β为测量半径方向与水平坐标系E轴的夹角,水深为h.
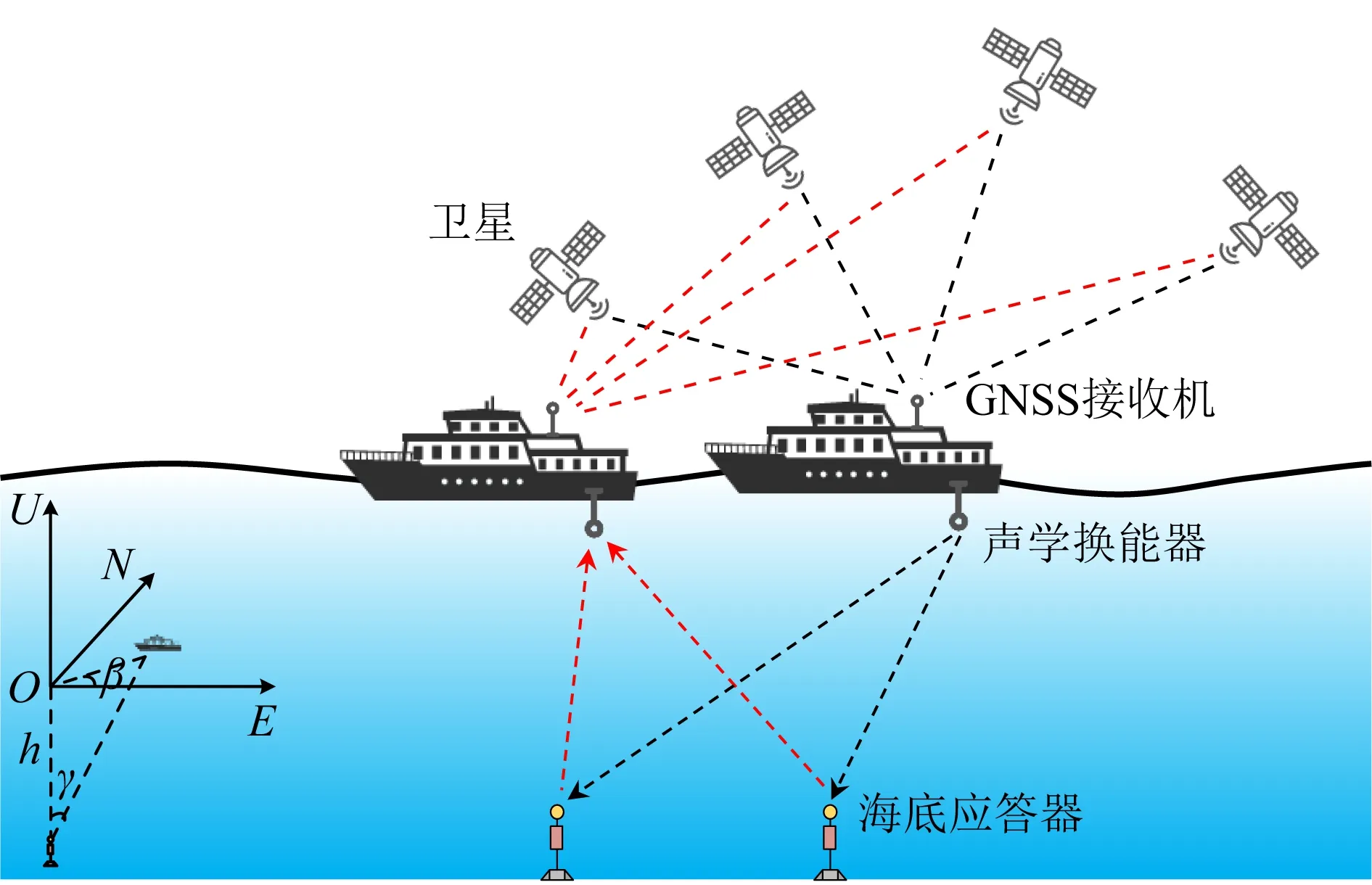
图1 水下声学定位技术原理图Fig.1 Principle of underwater acoustic positioning
首先,通过GNSS定位技术获取测量船在声学测距时不同时刻的GNSS天线坐标,利用船载罗经提供的实时姿态数据,将天线坐标转换为船载换能器的坐标;然后,利用声学换能器和布设在海底的控制点(声学应答器)组成的声学观测系统测得的声波传播时间以及声速剖面,可以计算出声学换能器和应答器之间的几何距离.考虑到声波在传播过程中,测量船并不是静止的,因此,在NEU坐标系中,水下声学定位的定位模型可以写成(Xu et al., 2005; Ribeiro et al., 2015; 曾安敏等,2021):
ci·ti=ρf,i+ρb,i+δρd,i+εi,
(1)
(2)
(3)
式中,ti表示第i个历元声学测距所测得的双程传播时间;ci表示ti期间声波在海水中传播的等效声速;ρf,i和ρb,i分别表示发射时刻和接收时刻换能器和海底应答器之间的几何距离;nf,i、ef,i和uf,i表示发射时刻换能器的三维坐标;nb,i、eb,i和ub,i表示接收时刻换能器的三维坐标;nseafloor、eseafloor和useafloor表示待估的海底应答器的三维坐标;δρd,i表示由换能器安装校准偏差、应答器响应误差、声速扰动引起的测距系统误差;εi表示随机误差,包含声学时延测距误差、换能器坐标的有色和白色噪声.
将式(1)通过泰勒级数展开后,水下声学定位模型的误差方程可以表示为:
(4)
(5)
(6)

(7)
vi为第i个历元计算得到的观测量残差.
对于n个观测历元,可以列出误差方程组:
(8)

式(8)的矩阵形式可以表示为:
V=A·dX-L.
(9)
根据式(9)和最小二乘准则,可以得到未知参数的改正数为:
dX=(ATPA)-1·(ATPL)=N-1·U,
(10)
式中,N为法矩阵;P为观测量的权矩阵.

(11)
(12)

从式(12)可以看出,未知参数的协方差矩阵是由观测方程残差和法矩阵组成的函数,所以未知参数协方差矩阵的值可以反映出观测量的全部几何信息以及未建模误差的大小.因此可以通过优化测量航迹的几何构型和定位解算模型来提高GNSS-A技术的定位精度(Sato et al., 2013; Chen et al., 2020).
2 直线测量模式分析
2.1 直线测量模式参数可估性
Chen和Wang(2007)给出了一种基于隐函数的直线测量模式数值分析方法,本文从三角函数的角度出发给出另一种分析思路.直线航迹,可认为是由n个相同圆心的圆嵌套而成,如图2所示.假设测量船是精确的沿着直线航迹走航,则可以认为每个历元βi保持不变,因此直线测量模式定位模型误差方程中的设计矩阵Aline可以表示为:
(13)
在式(13)中,若将Aline矩阵中的每一列元素同时除以cosβ,则可以看出,矩阵中第一列元素和第二列元素存在明显的线性关系,且系数为常数tanβ,因此矩阵Aline的秩为2,其法矩阵N不可逆.这些分析结果表明,若以一条单一的直线航迹进行声学定位,则海底控制点的坐标存在无穷多个解,即式(9)没有唯一解.

图2 直线测量模式示意图Fig.2 Straight-line survey pattern
若要解决该问题,只需要沿着两条或者多条不同的直线航迹进行声学测距.假设另一条直线航迹与水平坐标系E轴的夹角为α,且走航距离相同,由此可建立的定位模型误差方程中的设计矩阵Aline可以表示为:
(14)
从式(14)可以看出,若α≠β,则矩阵Aline的秩为3,法矩阵N可逆.说明只有当沿两条或者多条直线航迹进行声学定位时,才可以唯一确定海底控制点的三维坐标.
2.2 十字测量模式的最优几何构型
圆形测量模式由于其特殊的几何结构导致在估算海底控制点三维坐标时,垂直分量的精度被弱化(Chen et al.,2020).若要保证垂直分量的精度,则需要测量船过顶观测.而为了同时获得几何上良好的对称,十字交叉的测量模式(Yang et al.,2020;Chen et al.,2020)是一种可行的测量方式,即由两条交叉且垂直并经过海底控制点顶部的直线航迹所构成的观测图形,如图3所示.

图3 十字航迹示意图Fig.3 Schematic diagram of cross-track
直线走航不同于圆走航,在于圆走航时每个历元声学换能器相对海底控制点的距离几乎相等,因此可以认为观测量之间独立等精度,在解算时可以认为权矩阵P为单位阵;但是直线走航时每个历元声学换能器相对海底控制点的距离都是不同的,所受随机误差的影响不同,因此直线走航时可采用顾及声线入射角的定权模型或其他定权模型来确定权矩阵(赵爽等, 2018;Wang et al., 2019;孟庆波等,2019).但为了公式的推导简洁明了,在本文中我们依然采用单位权矩阵进行分析(在实际解算时不宜使用单位权).
(15)
根据三角函数诱导公式,可得:
(16)

(17)
根据三角函数诱导公式,可得:
(18)
由式(16)和(18)可以得十字航迹的设计矩阵Acr为:
(19)
根据式(19)则可得到十字航迹的法矩阵Ncr为:
(20)
利用法矩阵Ncr可以得到满足航迹最优几何结构的条件,tr(N-1)反映了位置精度(Zhao et al., 2013, 2016; Moreno-Salinas et al., 2016; 曾安敏等, 2021),tr(N-1)的平方根为位置精度因子(PDOP),即水平精度因子(HDOP)和垂直精度因子(VDOP)之和的平方根,表示为:
PDOP2=HDOP2+VDOP2.
(21)
在单位权方差因子一定的情况下,要想点位精度最高,则位置精度因子要最小.
法矩阵N的对角线元素之和等于采样数(Zhao et al., 2016;孙文舟,2019;曾安敏等,2021),即:
(22)
要PDOP2取最小值,则可对其构造Lagrange函数:

(23)
根据极值求解规则,可得:
(24)
即有:
(25)
式(25)中γ1,γ2,…,γn的几何关系如图3所示.因为测量船在走航时是匀速的,且采样间隔是固定的,所以假设一次采样间隔期间,测量船的走航距离相等且为s,则有:
(26)
那么式(25)可以写成:
(27)
式(27)中,h和s在实际测量中都为固定值,此时只需得到采样数n,就可以得到最优的走航长度.因为ns=r,利用Matlab工具可以解算得到十字航迹的最佳走航长度为:
r≈4h.
(28)
2.3 直线测量模式
从前面的分析可以看出,若要得到最优的海底控制点三维点位精度,在3000 m水深的情况下,走航长度要达到10 km以上,而一般用来进行声学测距系统的工作距离大概为10 km,距离越远,观测数据的质量将大幅降低,因此,十字航迹在大多数情况下不会单独用来进行海底控制点的绝对定位.此外,十字测量模式主要是为了改善圆形测量模式定位的垂向几何结构,所以十字测量模式通常是与圆形测量模式组合应用的,形成常见的圆加十字测量模式,如图4所示.
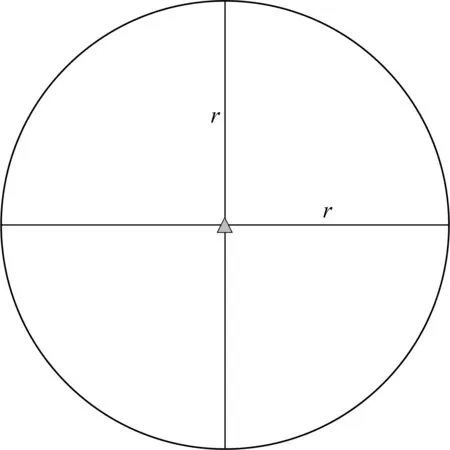
图4 圆加十字航迹示意图Fig.4 Schematic diagram of circular track plus cross-track
直线测量模式较圆形测量模式最显著的特点表现在,直线测量模式设计矩阵中垂直分量的系数是不断变化的,而圆形测量模式设计矩阵中垂直分量的系数几乎保持不变,若将测量时所受到的测距系统误差看作一个待估参数且系数为1,则直线测量模式无需附加先验信息就能较好地将系统误差参数分离,因此采用直线测量模式进行水下声学定位时,海底控制点垂直分量所受到测距系统误差影响较小,从而满足垂直分量精度的要求.直线测量模式最大的优点在于实际测量时便于测量船的控制,图形规则.但是沿着一条规则的直线进行测量时无法得到唯一的海底控制点三维坐标,至少需要沿着两条直线进行测量,才能得到唯一解.
有文献指出,若要使垂直分量精度最高,应在水声应答器的过顶方向进行重复观测(曾安敏等,2021).前文已经提到,几何上平衡且对称的复杂观测航迹有助于约束垂直方向所受到的误差影响,有利于监测声速结构的水平不均一性.因此,作为增强圆形测量模式垂向几何结构的补充图形,综合考虑测量船的控制,图形结构的对称性,是否过顶观测以及增加采样数所产生的经济效应等多种因素,较两条平行直线图形、交叉非垂直图形、几横几竖交叉网图形等其他由直线组成的观测图形而言,十字测量模式是最优选择.
3 圆加十字测量模式最优几何构型分析
假设圆形测量模式的直径刚好为十字测量模式的长度,且采样数为m,因为测量船的采样间隔固定,假设十字测量模式的采样数为4n,则n和m之间的关系为:
(29)
圆形测量模式的法矩阵Ncircle可写为(孙文舟,2019;曾安敏等,2021):
(30)
如此,圆加十字测量模式的法矩阵Nccr可写为:
(31)
可以看出,圆加十字测量模式下垂直分量的几何结构变得更好,其方差明显小于圆形测量模式的方差,垂直分量精度将会更高.同式(22),法矩阵Nccr的对角线元素之和为m+4n.所以要PDOP2取最小值,对其构造Lagrange函数可以解得:
(32)
根据图4中的几何关系,式(32)可以写成:
(33)
同样水深h和s均为固定值,因为ns=r,可以得到圆加十字测量模式的最佳走航半径为:
r≈1.15h,
(34)
4 实测数据分析
为了验证增加十字测量模式能有效改善圆形测量模式的垂向几何结构,提高定位精度,本文采用南海实测数据进行分析.本次实验数据的采集时间为2021年5月3日至5月4日,实验地点在南海海域,实验搭乘“向阳红18号”科考船参与数据采集.船上搭载星基差分接收机、姿态测量仪、自容式SVP以及DP系统.其中星基差分接收机能够提供星基差分服务,获得的测量船轨迹精度优于0.5 m;姿态测量仪的采样频率为5 Hz,精度优于0.01°;自容式SVP的测量精度优于0.1 m·s-1;DP系统能够保证在布设海底控制点和测量声速剖面时,测量船的位置不发生改变.在测量过程中,船速不超过3 kn.此次实验测区水深约3000 m,海底地形较为平坦,海况良好.
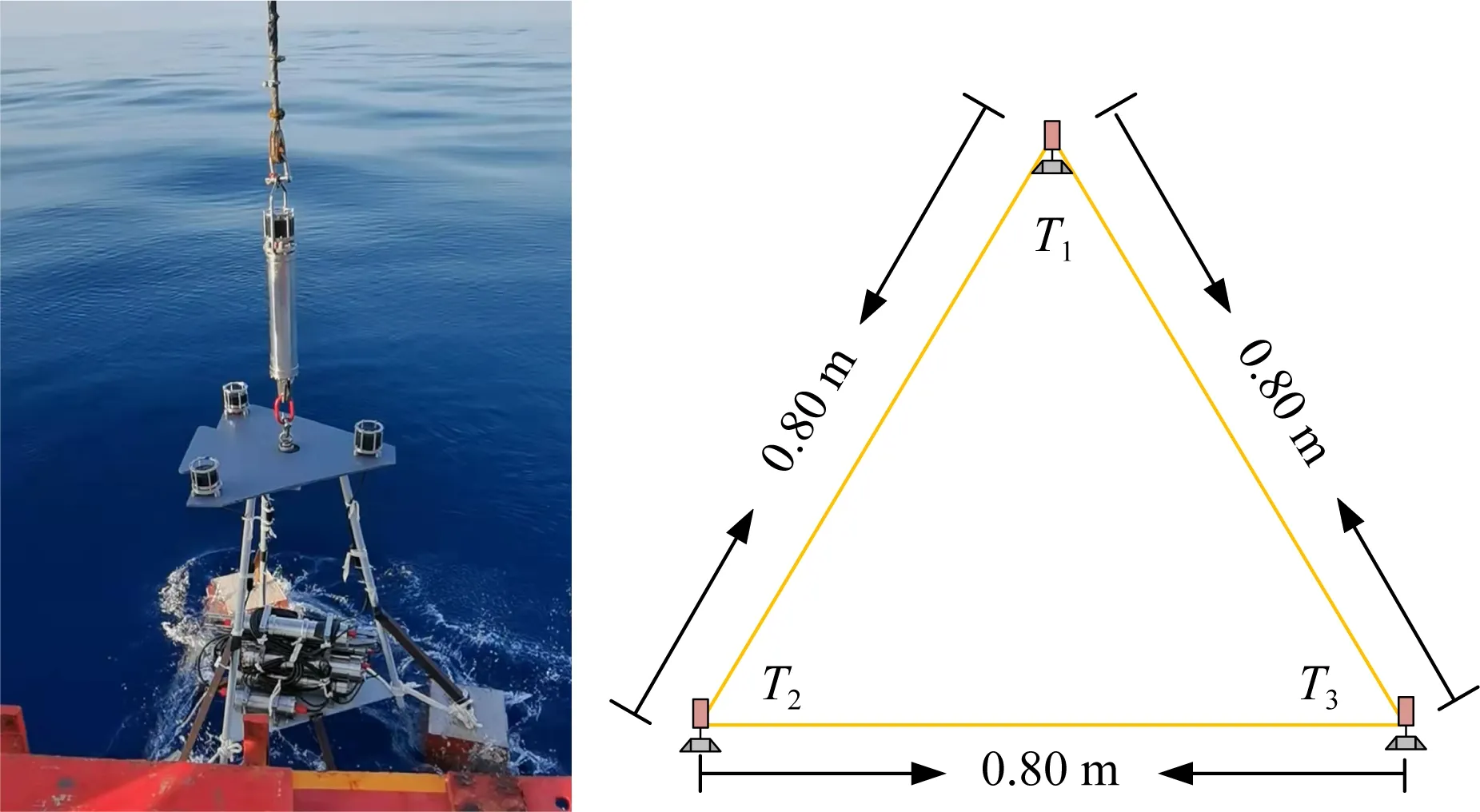
图5 海底控制点及信标布放位置示意图Fig.5 Schematic diagram of seafloor control point and beacon placement position on the station

图6 圆形航迹Fig.6 Circular track
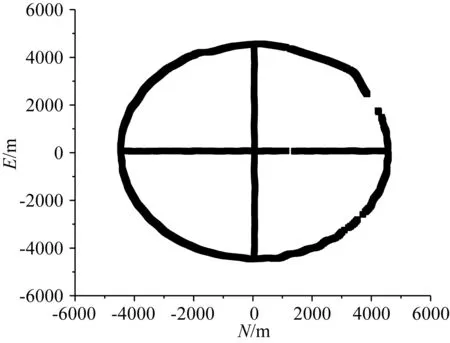
图7 圆加十字航迹Fig.7 Circular track plus cross-track
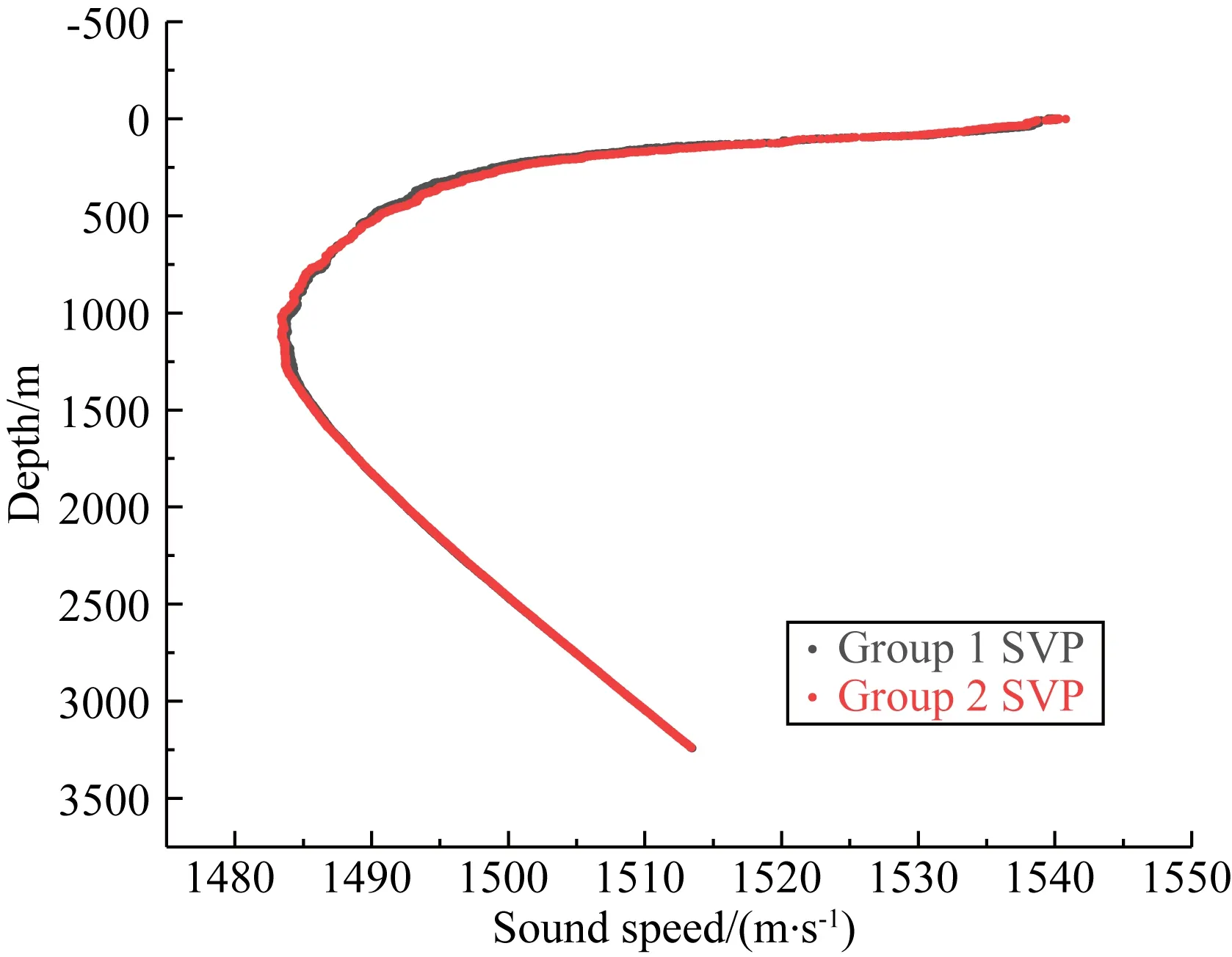
图8 声速剖面Fig.8 Sound velocity profile
此外,为了验证增加十字航迹能有效提高圆形测量模式的垂向精度,由于布设的海底控制点没有已知的坐标值,本文采用其他日期的观测数据解算的结果作为外部检核值.其中T1的采样数为4875,T2的采样数为5043,T3的采样数为4937,解算的垂向坐标分别为-3253.49 m,-3253.54 m,-3253.46 m.这批观测数据的采样数远远多于圆形航迹和圆加十字航迹的采样数,在解算方法一致的情况下,理论上来讲坐标解算精度更高,因此本文将该结果称为参考值.
分别解算圆形航迹和圆加十字航迹中水声应答器T1、T2、T3的坐标,计算结果如表1所示.

表1 不同航迹定位结果Table 1 Positioning results by different track
表1中,N、E、U分别为当地水平坐标系中的北向分量、东向分量和垂直分量,σn、σe、σu分别为N、E、U分量的内符合精度.可以看出圆形测量模式和圆加十字测量模式之间的差值在0.1 cm左右,两种方案计算的点位坐标结果差异较小.但是仅从内符合精度无法看出圆加十字测量模式相比于圆形测量模式对海底控制点定位精度的提升.
由于水声应答器T1、T2、T3之间存在一个固定基线长0.80 m,可以利用不同航迹解算得到的T1、T2、T3的坐标位置来求得它们之间的几何长度,与外部参考值进行比较,从而来评估圆形航迹和圆加十字航迹的定位精度.表2为外部参考值0.80 m与应答器坐标反算的距离之间的偏差.其中圆形航迹解算的结果差值最大为0.068 m,最小为0.016 m,平均偏差为0.041 m;圆加十字航迹解算的结果差值最大为0.029 m,最小为0.026 m,平均偏差为0.027 m.
表3为水声应答器的垂直坐标解与参考值之差,其中圆形航迹解算的垂直坐标与参考值之间的最大偏差为0.57 m,最小为0.44 m;圆加十字航迹解算的垂直坐标与参考值之间的最大偏差为0.47 m,最小为0.40 m.这些结果进一步说明了增加十字航迹能有效改善圆形测量模式的垂向几何结构,提高对海底控制点的定位精度.

表2 水声应答器之间的真实值和坐标计算值之差Table 2 Difference between the true value of the transponder and the calculated value of the coordinates
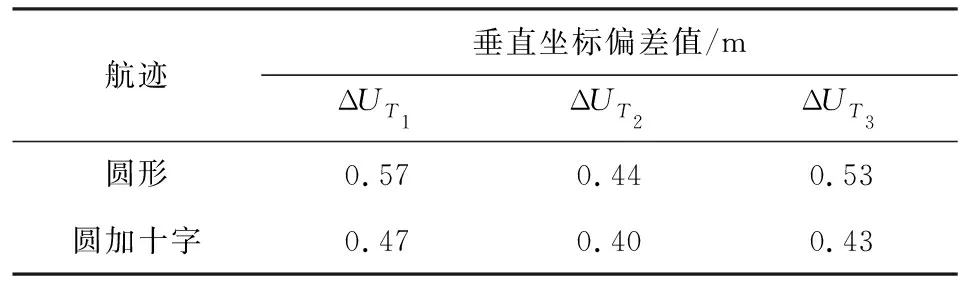
表3 水声应答器的垂直坐标偏差值Table 3 Vertical coordinate deviation of transponders
5 结论
本文针对直线走航,提出了一种基于嵌套圆的新的分析方法,从数学上证明了采用直线测量模式时至少需要两条直线来进行测量,才可以唯一确定海底控制点的三维坐标.在此基础上,对广泛提出的十字测量模式进行了系统分析,从理论上推导了采用十字测量模式时获得最优海底控制点三维点位精度的走航长度为8倍水深,若在深海测量时,现有的声学测距设备无法满足该条件.此外,从理论上证明了圆加十字测量模式的最优测量半径,并用实测数据验证了在圆走航的基础上增加直线走航能有效改善定位的垂向几何结构,提高海底控制点的定位精度.并且,该理论分析方法不仅适用于圆加十字测量模式,任何由圆或者直线组成的测量轨迹均可利用该方法进行分析,从而在实验之前得到预设轨迹的最优走航半径(长度).
本研究充分说明了海底控制点的定位精度与测量船走航轨迹密切相关,不同航迹具有不同的几何分布,有助于获得几何上良好平衡的观测数据,同时有助于约束垂直运动和减小声速结构误差的影响.
需要指出的是,并不存在所谓的唯一最优航迹,但是,优化测量航迹不仅能提高海底定位精度,同时能提高观测效率.
致谢特别感谢国家重点研发计划“海洋大地测量基准与海洋导航新技术”项目组及深海试验全体科研人员的合作与支持.
猜你喜欢
文史春秋(2022年4期)2022-06-16
数学大王·趣味逻辑(2021年3期)2021-03-10
家庭影院技术(2020年6期)2020-07-27
青年歌声(2019年12期)2019-12-17
家庭影院技术(2019年1期)2019-01-21
家庭影院技术(2018年11期)2019-01-21
汽车观察(2018年12期)2018-12-26
家庭影院技术(2018年10期)2018-11-02
数学大世界(2018年1期)2018-04-12
北京航空航天大学学报(2017年7期)2017-11-24
